8位移法
《结构力学习题集》第8章位移法

第8章 位移法习 题一、判断题:1、位移法未知量的数目与结构的超静定次数有关。
( )2、位移法的基本结构可以是静定的,也可以是超静定的。
( ) 4、位移法典型方程的物理意义反映了原结构的位移协调条件。
( )5、图示结构,当支座B 发生沉降∆时,支座B 处梁截面的转角大小为12./∆l ,方向为顺时针方向,设EI =常数。
( )6、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
( )2θθC7、图示梁之EI =常数,固定端A 发生顺时针方向之角位移θ,由此引起铰支端B 之转角(以顺时针方向为正)是-θ/2 。
( )8、用位移法可求得图示梁B 端的竖向位移为ql EI 324/。
( )q9、结 构 按 位 移 法 计 算 时 , 其 典 型 方 程 的 数 目 与 结 点 位 移 数 目 相 等 。
( ) 10、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
( ) 11、超 静 定 结 构 中 杆 端 弯 矩 只 取 决 于 杆 端 位 移 。
( ) 12、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
2θθC二、填空题:13、判断下列结构用位移法计算时基本未知量的数目。
(1) (2) (3)(4) (5) (6)EIEIEIEI 2EI EI EIEIEA EA ab EI=EI=EI=24442第13题14、位移法可解超静定结构、静定结构,位移法典型方程体现了_______条件。
15、图示梁A 截面的角位移φA = ____________。
(杆长l,荷载作用在中点)16、图示结构,M AB = __________。
17、图示刚架,各杆线刚度i 相同,不计轴向变形,用位移法求得 M AD = ,M BA =___________。
Di i i A4518、图示结构M BA 的值为_____________,________________侧受拉。
结构力学第8章位移法

结构力学第8章位移法位移法是结构力学中一种常用的分析方法。
它基于结构物由刚性构件组成的假设,通过计算结构在外力作用下产生的位移和变形,进而推导出结构的反力和应力分布。
位移法的基本思想是将结构的局部位移组合成整体位移,通过建立位移和反力之间的关系,解决结构的力学问题。
位移法的分析步骤通常包括以下几个方面:1.建立结构的整体位移函数。
位移函数是位移法分析的基础,通过解结构的运动方程建立结构的位移与自由度之间的关系。
2.应用边界条件。
根据边界条件,确定结构的支座的位移和转角值。
支座的位移和转角值可以由结构的约束条件和外力产生的位移计算得出。
3.构建位移方程组。
将结构的整体位移函数带入到结构的平衡方程中,得到位移方程组。
位移方程组是未知反力系数的线性方程组。
4.解位移方程组。
通过解位移方程组,求解未知反力系数。
可以使用高斯消元法、克拉默法则或矩阵方法等解方程的方法求解。
5.求解反力和应力分布。
通过已知的位移和未知的反力系数,可以计算出结构的反力和应力分布。
这些反力和应力分布可以进一步用于结构的设计和评估。
位移法的优点是适用范围广泛,适合复杂结构的分析。
它可以处理线性和非线性的结构,包括静力学和动力学的分析。
同时,位移法具有较高的精度和准确度,在结构的分析和设计中得到广泛应用。
然而,位移法也存在一些限制。
首先,位移法假设结构是刚性的,忽略了结构的变形和位移过程中的非线性效应。
其次,位移法需要建立适当的位移函数,对于复杂结构来说,这是一个复杂和困难的任务。
此外,位移法在处理大变形和非线性结构时可能会遭遇困难。
综上所述,位移法是结构力学中一种重要的分析方法。
它通过计算结构的位移和变形,推导出结构的反力和应力分布,为结构的设计和评估提供基础。
然而,位移法也存在一些限制,需要在具体的分析问题中谨慎应用。
结构力学上第8章 位移法

(非独立角位移) l FQBA
M AB M BA
F 3i A 3i M AB l 0
3、一端固 FQAB
A
B1
B
l
F M AB i A i B M AB F M BA i A i B M BA
(非独立线位移)
q B EI C L
Z1
q B
EI C
Z2 4i
Z1=1
EI A 原结构
L
=
Z2=1
EI A qL2 8 基本体系
=
3i
M1图×Z1 2i
+
6EI L2 6EI M2图×Z2 L2
+
qL2 8 MP图
在M1、M2、MP三个 图中的附加刚臂和链杆 中一定有约束反力产生, 而三个图中的反力加起 来应等于零。
M
q
应用以上三组转角位移方程,即可求出三种基本的单跨超 静定梁的杆端弯矩表达式,汇总如下:
F 1)两端固定梁 M AB 4i A 2i B 6i M AB
M BA
l F 2i A 4i B 6i M BA l
2)一端固定另一端铰支梁
F M AB 3i A 3i M AB l M BA 0 3)一端固定另一端定向支承梁 F M AB i A i B M AB
3
2
1
结点转角的数目:7个
独立结点线位移的数目:3个
D
E
A
B
C
C
D
刚架结构,有两个刚结点D、E, 故有两个角位移,结点线位移由铰 结体系来判断,W=3×4-2×6=0, 铰结体系几何不变,无结点线位移。
A
B
结构力学龙驭球第八章
第八章 位移法总结
A EI
B EI
C
2EI D
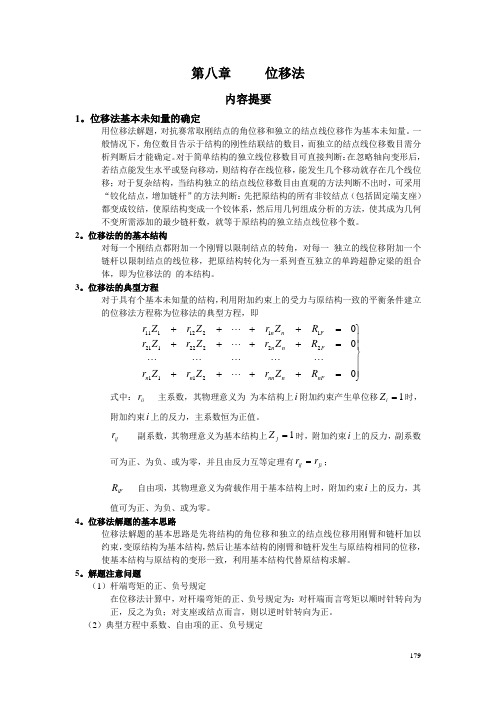
一根直杆的刚度不同时, 位移基 本未知量的确定
如图,将BD杆分为BC和CD两根 杆件,则本题有三个未知量 B,
C ,⊿C。
第八章 位移法 总结
(a) E F G
F
C
B l/2
D l
H
A
l
l/2 l/2
(b) C
F B
D
A
(c) C
F D
3 F /28
(3) 在基本结构上分别绘制在各附加约束分别产生单位
位移Δj =1下的弯矩图 及M荷j 载作用下的弯矩图MP
第八章 位移法总结
由平衡条件求出系数kij和自由项Fi P;
(4) 解方程求Δj;
注意:一切计算
(5) 按叠加原理计算杆端弯矩。 都是在基本结构上进
M M 1 1 M 2 2 M n n M p 行!
第八章 位移法总结
MKF112q2a2
qa2
24
MFK11q2a281q2a245q82a
(c) m K
C
q
(d)
F
K
n
q/ 2
(e)
F
K
q/ 2 F
MCK112q2a281q2a2q42a8 M KC
qa2 24
再将图c荷载分解为为正对称与反对称的 叠加,取半结够如图d(正对称 )、图 e(反对称)所示。由叠加得: (上拉) (上拉) (左拉) (右拉)
三、几个值得注意的问题
1. 位移法的适用条件
(1) 位移法既可以求解超静定结构,也可以求解静定结 构;
(2) 既可以考虑弯曲变形,也可以考虑轴向和剪切变 形;
第8章 位移法1

A
EI
EI
B
l/2 P
l/2
C
2. AB杆:相当于一端固定一 端铰支梁在支座A处发生转 角 。 MAB=3i
3. AC杆:相当于两端固 定梁在支座A处发生转角 及荷载共同作用。
MAC=4i+Pl/8 MCA=2i-Pl/8
由上述分析可知,如果能求出 ,则各杆 的内力就可求出。所以可把转角 作为基 本未知量。 4. 如何求 ?
2
基本体系
r11 4i 6i R1P
2i
M1
q
ql 2 / 8 ql 2 / 8
MP
2 ql / 20 位移法求解过程 :
Z1 ql 2 / 80i
M M 1 Z1 M P
q 1)确定基本体系和基本未知量 2)建立位移法方程 3)作单位弯矩图和荷载弯矩图 4)求系数和自由项 ql2 / 40 M 5)解方程 6)作弯矩图
M AB
3i F 3i A AB M AB l
(三)一端固定一端定向杆的转角位移方程
A
B A
P
B
F M BA
A
A
M AB i A M BA -i A
B i
M
F AB
M AB i A M
F AB F BA
M BA i A M
二.单跨超静定梁的形常数与载常数
ql2/8
q D A
C 4i B 3i A 2i
D
C
B
M1图
3) 画出单位弯矩图和荷载弯矩图 4) 求各系数
MP图
5) 画出弯矩图
2 r11 8i R1P ql / 8 R1P ql2 Z1 r11 64i
第8章 位移法

第8章 位移法§8-1 概述§8-2 等截面直杆的转角位移方程§8-3 位移法的基本未知量和基本结构§8-4 位移法的典型方程及计算步骤§8-5 直接由平衡条件建立位移法基本方程§8-6 对称性的应用2021-5-1212021-5-12 1§8-1 位移法的基本概念内力对于线弹性结构位移位移内力两种方法的基本区别之一,在于基本未知量的选取不同:力法是以多余未知力(支反力或内力)为基本未知量,而位移法则是以结点的独立位移(角位移或线位移)为基本未知量。
用位移法分析结构时,先将结构拆分成单个的杆件,进行杆件受力分析(建立杆件的转角位移方程);再将杆件组装成原结构,利用结点和截面平衡条件建立位移法方程,解出结点位移,再由转角位移方程求出内力。
2021-5-121一、引例1. 确定基本位移未知量图a所示两跨常刚度连续梁,抗弯刚度为EI。
忽略二杆的轴向变形,B结点不会发生线位移,而仅会产生角位移,设此角位移为Z1。
因B结点刚结两梁段于B端,从而保证两梁段在B端有相同的角位移,均为Z1。
2021-5-1212. 分列各组成杆的转角位移方程AB和BC二杆在B端具有相同的角位移和零线位移后,因此可将二杆在B端处分开,单独分析。
2021-5-1211)AB杆2)BC杆2021-5-1213. 通过B结点的平衡条件求出Z1由B结点的平衡可得2021-5-1214. 将Z1代回转角位移方程,求出各杆端弯矩2021-5-1212021-5-121二、其他示例(a) 若略去受弯直杆的轴向变形,并不计由于弯曲而引起杆段两端的接近,则可认为三杆长度不变,因而结点A没有线位移,而只有角位移。
对整个结构来说,求解的关键就是如何确定基本未知量q A的值。
2021-5-1212021-5-121三、位移法计算原理思路小结1. 把结构在非支座结点处拆开,将各杆视为相应的单跨超静定梁。
位移法

示。基本结构的变形与原结构是相同的,要使它们受力也相同,则
基本结构在荷载与Z1、Z2的共同作用下,附加联系(含附加刚臂及附 加链杆)处的反力矩及反力应为零(因为原结构不存在这些约束),假 设附加刚臂处的反力矩为 R1,附加链杆处的反力为R2,则
R1 0 R2 0
(a)
设由Z1、Z2及荷载引起的附加刚臂上的反力矩为R11、R12、R1P,
“附加链杆”阻止结点的移动。位移法中的基本未知量用Z表示,
这是一个广义的位移,并用“ ⌒”及“→”分别表示原结点处
的角位移、线位移的方向,加在附加刚臂及附加链杆处,以保证 基本结构与原结构变形是一致的,如图8-5(c)、(f)。 对于图8-7(a)所示刚架,刚结点E、G的转角为基本未知量,分别 用Z1、Z2表示,铰结点处的竖向线位移也是一个基本未知量用Z3 表示,基本结构为图8-7(b)。图8-7(c)所示刚架,F为一组合结点, 即BF、EF杆在F处为刚结,该结构
(8-4)
式(8-3)称为图8-4(a)所示单跨梁的转角位移方程。式(8-3)还 可由式(8-1)推出,由MBA=0可得(荷载项单独考虑)
2i A 4i B
6i AB 0 l
(a)
B
1 3 ( A ab ) 2 l
将(a)式代入式(8-1)第一式可得
M AB 4i A 2i[ 3i A 1 3 6i ( A AB )] AB 2 l l
l
独立的角位移数目也就是刚结点的数目。图8-5(d)所示刚架,
E为铰结点,汇交于E结点的三根杆件各杆端转角由上节可
知不是独立的,故该刚架,
。 n 2, n 1.
l
独立的线位移数目,对于较复杂的结构无法直接观察而得,可采
第8章位移法
(4)解方程求基本未知量。将系数和自由项代入位移法方程,得
解方程得
(5)绘内力图。由 叠加绘出最后M图,如图(f)所示。
(6)校核,在图(f)中取结点1为隔离体,验算是否满足 的平衡条件。由
可知计算无误。
题8-5试用位移法计算图(a)所示刚架,并绘制弯矩图。
(6)校核。在图(e)中取结点1为隔离体,验算是否满足平衡条件。由
可知计算无误。
题8-3试用位移法计算图(ห้องสมุดไป่ตู้)所示刚架,并绘制内力图。
题8-3图
解:(1)形成基本结构。此刚架的基本未知量为结点1的角位移 ,基本结构如图(b)所示。
(2)列出位移法方程
(3)求系数和自由项。绘出 和荷载作用在基本结构上的弯矩图,如图(c)、(d)所示。
(4)解方程求基本未知量。将系数和自由项代入位移法方程,得
解方程得
(5)绘弯矩图。由 叠加绘出最后M图,如图(f)所示。
(6)校核心。在图(f)中取结点1为隔离体,有
再取杆12为隔离体,有
可知计算无误。
题8-6试用位移法计算题19。6图(a)所示刚架,并绘出弯矩图。
题8-6图
解:(1)形成基本结构。此刚架的基本未知量为结点1的角位移 和结点1的水平线位移 ,基本结构如图(b)所示。
在图(c)、(d)中分别利用结点的平衡条件计算出系数和自由项如下:
(4)解方程求基本未知量。将系数和自由项代入位移法方程,得
解方程得
(5)绘地内力图。由 叠加绘出最后M图,如图(e)所示。利用杆件和结点的平衡条件可作出 图,分别如图(f)、(g)所示。其中在绘 图时需补充水平方向的变形条件才能求出,即A1杆的伸长量与B1杆的伸长量之和等于零。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3i/L 6i/L 6i/L Z3=1
k13
M3图
∑M
B
=0
3i/L
BE截面 截面: 取BE截面:
FQBA FQBC
3i k13 = − L
3i FQBA = L FQBC = 0 12i FQED = − 2 L 15i k33 = L
结点: 取E结点:
k23
6i/L
∑ME = 0
k11Z1 + k12 Z 2 + k13 Z 3 + F1P = 0 k21Z1 + k22 Z 2 + k23 Z 3 + F2 P = 0 k31Z1 + k32 Z 2 + k33 Z 3 + F3 p = 0
基本体系和典型方程法
4、求系数和自由项
Z1=1 3i 4i A D E B 2i i
i
B C
其它各种情况的处理
7、有刚度无穷大杆件的刚架计算
用位移法求解图示有刚度无穷大杆件的刚架。 例:用位移法求解图示有刚度无穷大杆件的刚架。
C A FP EI A L L B EI=∞ C L EI=∞ D B
由于CD杆的抗弯刚度为无穷大, 由于CD杆的抗弯刚度为无穷大, CD杆的抗弯刚度为无穷大 因此C、D结点不可能发生转角,即: 因此C 结点不可能发生转角, ϕC = ϕ D = 0 ∆ 未知量只有: 未知量只有: CD
结点: 取B结点:
2i Z2=1
k12
4i 4i
∑M
B
=0
2i
BE截面 截面: 取BE截面:
FQBA FQBC
k12 = 2i
FQBA = 0 FQBC = 0 6i FQED = − L 6i k32 = − L
2i
M2图
结点: 取E结点:
k22
4i
4i
∑M
E
=0
FQED
k22 = 8i
k32
基本体系和典型方程法
基本体系和典型方程法
把系数和自由项代入位移法典型方程中, 把系数和自由项代入位移法典型方程中,得:
3i 8iZ1 + 2iZ 2 − Z 3 − M = 0 L 6i 2iZ1 + 8iZ 2 − Z 3 = 0 L 3i 6i 15i − Z1 − Z 2 6 + 2 Z 3 = 0 L L L
∑M
B
=0 3FP L =0 16
4iϕ B −
… …① ①
其它各种情况的处理
特别要提醒的是固端弯矩的计算: 特别要提醒的是固端弯矩的计算:
FP FP i i
i
A
D E
AB杆的固端弯矩: AB杆的固端弯矩:用FP查一端固定 杆的固端弯矩 一端滑动单元。 一端滑动单元。 AB杆的固端弯矩:应用2F AB杆的固端弯矩:应用2FP查一端固 杆的固端弯矩 定一端滑动单元。原因是: 定一端滑动单元。原因是:上层的力 对下面层有影响,例如AB杆的剪力是: AB杆的剪力是 对下面层有影响,例如AB杆的剪力是: FP,BC杆的剪力是 杆的剪力是2F FP,BC杆的剪力是2FP 。
基本体系和典型方程法
为常数。 例1:用典型方程法计算图示结构,杆长均为 ,EI为常数。 :用典型方程法计算图示结构,杆长均为L, 为常数
M B A D E C 原结构 L L L A Z2 D Z3 E Z1 M B C
未知量: 解:1、未知量:ϕ B ϕ E ∆V 2、基本结构如上图所示 3、位移法方程
结点: 取B结点: k11
3i i 4i
∑M
B
=0
M 1图
k11 = 8i
BE截面 截面: 取BE截面:
FQBA FQBC
取E结点: 结点:
3i FQBA = − L FQBC = 0 FQED = 0 3i k31 = − L
2i
k21
∑ME = 0
k21 = 2i
FQED
k31
基本体系和典型方程法
∑M
0
=0
FP L − FQBA 2 L + M BA = 0
6 EI 12 EI FQBA = − 2 ϕ B + 2 × 2∆ 2L 2L 2L 3EI 6 EI = − 2 ϕB + 3 ∆ L L 3 2 EI 6 2 EI 2 EI PL + ϕB − ∆+ ϕB 2 L L L 3 2 EI − ∆=0 2 L 4 2 EI 9 2 EI ϕB − ∆ + FP L = 0 2 L L
其它各种情况的处理
杆端弯矩: 杆端弯矩:
3FP L M BC = 3iϕ B − 16 M BA = iϕ B M AB = −iϕ B
位移法方程: 位移法方程:
AB杆的杆端弯矩, AB杆的杆端弯矩, 杆的杆端弯矩 应按一端固定一端 滑动单元来写。 滑动单元来写。 上述计算方法称为: 上述计算方法称为:无剪 力法。只能用于上列结构, 力法。只能用于上列结构, 即有侧移的杆件其剪力是静 定的。 定的。
后面的计算省略了。 后面的计算省略了。
其它各种情况的处理
5、带斜杆刚架的计算
用位移法求解图示有斜杆的刚架。 例:用位移法求解图示有斜杆的刚架。 △
FP B EI EI A L L
M BA = 4 M AB EI 6 EI ϕB − 2∆ 2 EL ( 2 L) 6 EI EI =2 2∆ ϕB − 2 2L ( 2 L)
△ EI
FP CL EI
未知量: 解:1、未知量:ϕB ∆
∆ BA = 2∆ ∆ BC = ∆
杆端弯矩: 2、杆端弯矩:
O
其它各种情况的处理
5、带斜杆刚架的计算
3i M BC = 3iϕ B + ∆ L 建立位移法方程: 3、建立位移法方程:
FP
其中: 其中:
FQBA MBA
∑M
B
=0
EI 3EI (4 + 2 )ϕ B 2L L 3EI 6 EI 2)∆ = 0 +( 2 − 2 L ( 2 L)
L
其它各种情况的处理
杆端弯矩: 杆端弯矩:
4 EI ∆ 6 EI × − 2∆ M BA = − 2 2 L L ( 2 L) 2 EI ∆ 6 EI M AB = − × − 2∆ 2 2 L L ( 2 L)
O
FP
BA
FQBA MBA
位移法方程: 位移法方程:
∑M
0
=0
FP L − FQBA 2 L + M BA = 0
其它各种情况的处理
6、有无剪力杆件结构的计算
用位移法求解图示有无剪力杆件的刚架。 例:用位移法求解图示有无剪力杆件的刚架。
B EI FP EI
L
B Z1 FP EI EI C
剪力 是静 定的
C
B
ห้องสมุดไป่ตู้
原结构
A L
A
基本体系
A
一端固定 一端滑动单元
ϕ 常规计算未知量是: 常规计算未知量是: B ∆ BC 但请注意:BA杆的剪力是静定的 若只把B 杆的剪力是静定的, 但请注意:BA杆的剪力是静定的,若只把B结点的转角固 定起来,它的受力与一端固定一端滑动单元相同。因此, 定起来,它的受力与一端固定一端滑动单元相同。因此,此 题的未知量可只取一个: 题的未知量可只取一个: ϕ B 。
由于BA杆只能绕A点转动, 由于BA杆只能绕A点转动,因此BA BA杆只能绕 BC杆的侧移为 杆的侧移为 2∆ ,BC杆的侧移为 ∆ 。 又由于BC杆的刚度无穷大, BC杆的刚度无穷大 又由于BC杆的刚度无穷大,不可能发 生弯曲变形,为了保持原先的夹角, 生弯曲变形,为了保持原先的夹角, BA杆的 杆的B BA杆的B端必然发生转角 ∆ 。
6i k23 = − L
FQED
k33
基本体系和典型方程法
M
结点: 取B结点:
F1P
M P图
M
∑M
B
=0
F1P = − M
BE截面 截面: 取BE截面: 结点: 取E结点:
FQBA FQBC
F2P
∑M
E
=0
FQED
FQBA = 0 FQBC = 0 FQED = 0
F2 P = 0
F3P
F3 P = 0