机器人竞技工程(双足竞步、自由体操、仿人竞速等)规则-中国机器人大赛暨RoboCup公开赛-场地制作
中国工程机器人暨国际公开赛比赛规则
中国工程机器人暨国际公开赛比赛规则
一、比赛时间和地点
中国工程机器人暨国际公开赛定于每年6月-8月间举办,具体时间、
地点和相关规定将在赛前进行公示。
二、参赛资格
1. 参赛选手必须年满18周岁,身体健康,具备一定的机器人制作和
编程能力;
2. 参赛选手应以个人或团队方式报名参赛,团队成员不得超过5人;
3. 参赛选手应提交完整的报名表及参赛机器人相关资料,并进行资格
审核。
三、比赛项目和规则
本赛事设定多个项目,包括速度、越障、追踪等,比赛规则将在比赛
前公布。
每个项目将设立决赛和半决赛等多个阶段,双方互相对抗,
比赛得分高者晋级下一轮。
四、比赛奖励
本赛事将设立多个奖项,包括总冠军、亚军、季军、最佳编程奖等,冠、亚、季军还将获得相应的奖金和奖品。
五、比赛纪律
1. 参赛选手应保持良好的比赛纪律,不得采取任何非法手段进行作弊;
2. 参赛选手应服从现场工作人员的指挥,不得进行违反规则的行为;
3. 如有违规行为,参赛选手会被取消比赛资格并受到相应的处罚。
六、其他
本赛事组委会有权对比赛规则和细则进行解释和修改,并在必要时作
出相应的改动和调整。
请参赛选手和观众遵守相关规定并共建公平、
公正、公开的比赛环境。
机器人大赛双足竞步机器人组比赛规则
机器人大赛双足竞步机器人组比赛规则一、报名要求根据组委会要求、鼓励大家参与更多的比赛项目,特作出如下要求:1、比赛以小组为参赛单位2、每组的参赛队员最多可以包含3名队员,指导老师1名3、所有的参赛队为便于统一安排协调,各参赛单位报名时所留的联系人的联系方式(电话、邮箱)要确保为一人,且此人能来到比赛现场。
请联系人定期查看邮箱。
4、在报名信息确认之后,任何参赛队伍都不能更改队伍信息。
二、机器人结构及其规格的设定:双足竞步机器人类型(1):交叉足印竞步机器人结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 150mm(宽)X 300mm(高),重量不超过1Kg。
机器人头部要能放入(长)200mm X(宽)100mm长方格内。
类型(2):狭窄足印竞步机器人结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 150mm(宽)X 300mm(高),重量不超过1Kg.,狭窄足印竞步机器人,单足最大尺寸要能放入(长)150mm X(宽)60mm长方格内。
机器人头部要能放入(长)200mm X(宽)100mm长方格内。
狭窄足印要求:机器人由与脚底板相邻的舵机控制机器人的重心左右移动来实现前进(见下图1)与脚底板相连的舵机平放在脚底板上,舵机的扭力输出轴与前进方向平行。
(见下图3)交叉足印要求:机器人由与脚底板上部的舵机控制机器人关节的前后摆动来实现前进(见下图2)与脚底板相连的舵机平放在脚底板上,舵机的扭力输出轴与前进方向垂直。
(见下图4)三、竞赛内容:类型1:交叉足印竞步机器人:机器人通过步行的方式从起点线走到终点线(相距200cm,限宽60cm)。
机器人足球竞赛规则

机器人足球竞赛规则ww w.c Z 文章来源初中教师网该规则适用于2对2和1对1对抗赛,不同之处有注明。
小学组为1对1竞赛,初中组和高中组为2对2竞赛。
一、竞赛场地及设备标准1.场地(内侧):长183cm,宽122cm,高14cm。
四角有防死球的等腰直角三角柱,直角边长8cm。
2.墙壁:场地边界有墙壁(包括球门区)。
墙壁高为14cm,墙壁内侧为黑色(哑光)。
3.球门:球门位于场地底线的中间,宽45cm,深12cm,高14cm。
球门上方有2cm宽的横梁,防止机器人进入球门内。
球门内部,包括地面、墙壁和横梁可以涂色(两边球门分别为黄色和蓝色)。
4.地面:地面是在硬板上覆盖一层绿色的地毯(材料:PVC,钻石纹)。
5.开球点:球场中央点。
6.坠球点:场地中定义了五个坠球点。
一个在场地正中;其余四个坠球点位于四个墙角附近,沿着赛场的长边分布,是在两边球门内侧联线方向上,靠近场地中部且距离门柱45cm远的那一点。
场地中的坠球点将用黑点标示。
7. 中圈:场地上将标出中圈,以场地中心为圆心,直径60cm,由黑色窄圈标示。
在开球时裁判可以中圈为依据。
8. 禁区:在每个球门前有个宽30cm、长75cm的禁区。
禁区由宽1cm的白线标示,白线也是禁区的一部分。
当机器人所有部分都在禁区内时,才视作“机器人在禁区内”。
9.照明:为室内照明灯光。
10.机器人:机器人体积(包括静止和比赛状态)正常置放时垂直投影面积必须在直径22cm(含)范围之内,限高22cm(含)以下,限重(含)以下。
机器人(形成三面包围球体的)踢球装置的控球深度最大为3cm,以突出的两点之间成一水平连线中任一点且垂直到机器人边沿的直线距离计算。
11.足球:直径9cm,重160±5g;是一个内部装有电池与小电珠的透明发光球(光线直接、均匀地覆盖球面,且无盲点)。
二、名词定义解释1.出界球:足球(越过墙壁)被机器人踢出球场外。
2.进球:当球完全进入球门区域或碰到球门后壁反弹,即为进球。
2021 中国机器人大赛比赛规则

2021 中国机器人大赛比赛规则
2021中国机器人大赛是由中国机器人大赛组委会主办的一项竞赛活动。
比赛规则如下:
1. 比赛类别:
a. 智能机器人竞赛类别:包括机器人足球、机器人救援、机器人舞蹈等。
b. 工业机器人竞赛类别:包括工业机器人操作、装配、焊接等。
2. 比赛组别:
a. 高校组:参赛队伍由高校学生组成,有固定学术指导老师。
b. 中小学组:参赛队伍由中小学生组成,有固定指导老师。
3. 参赛队伍:
a. 队伍人数:每支队伍一般为3-5人,不同赛项可能会有不同要求。
b. 参赛资格:参赛队伍需经过选拔赛等环节,获得参赛资格。
4. 比赛内容和评分:
a. 比赛内容将根据具体赛项安排,比如机器人足球比赛的规则、比赛场地等。
b. 比赛成绩将根据机器人的表现进行评分,包括比分、完赛时间、技术操作等方面。
5. 设备和技术规定:
a. 参赛队伍需自备相关设备和机器人。
b. 机器人规格、参数等需符合比赛规定,如机器人尺寸、重量、动力系统等。
c. 参赛队伍需具备相关机器人技术和操作技能。
6. 比赛组织与裁判:
a. 比赛由组委会组织,设有裁判团队进行监督和评判。
b. 比赛过程中,裁判可以对比赛场地、规则等进行适当调整和解释。
7. 奖项设置:
a. 比赛设有冠军、亚军、季军等奖项。
b. 根据比赛项目和参赛队伍数量,还可能设有最佳球队、技术创新奖、优秀组织奖等。
以上是一般的比赛规则,具体的规则可能会根据比赛项目和赛区的不同而有所调整和变化。
参赛队伍在报名之前,应详细了解和遵守具体的比赛规则。
中国机器人大赛规则
中国机器人大赛规则中国机器人大赛是我国一年一度举行的盛大赛事,旨在推动机器人领域的科学研究和技术创新。
本文将介绍中国机器人大赛的规则和参赛要求。
一、参赛资格1. 参赛者必须是中国公民或在中国合法居住,不限制参赛人数。
2. 参赛队伍需要有一个指导教师或导师,并具备相关科研背景或专业知识。
二、赛事组别中国机器人大赛包括多个赛事组别,旨在展示不同领域机器人的技术应用和创新成果。
1. 机器人舞蹈:参赛者需要设计和编程一个舞蹈表演机器人,展示其协调和灵活的舞蹈动作。
通过舞蹈演示评委会对机器人舞蹈技术进行打分。
2. 人机协作:参赛者需要开发具有人机协作能力的机器人系统,能够与人类完成特定任务。
评委会将根据任务完成的质量和效率对参赛机器人进行评分。
3. 智能家居:参赛者需要设计和制造一个智能家居控制系统,能够远程监控和控制各种家居设备。
评委会将根据系统性能和用户体验对参赛作品进行评审。
4. 仿生机器人:参赛者需要设计和制造仿生机器人,并模仿人体的运动和功能。
评委会将根据仿真程度和机器人性能对参赛作品进行评分。
三、评委评分标准评委会将根据以下几个方面对参赛作品进行评审:1. 技术创新:参赛作品是否具备创新性的技术应用和解决方案。
2. 功能完善:参赛作品是否能够准确、高效地完成相应任务。
3. 性能稳定:参赛作品在各种环境和条件下是否具有稳定的性能和可靠性。
4. 用户体验:参赛作品是否能够提供良好的用户体验和使用便利性。
四、赛事安排中国机器人大赛通常会分为初赛和决赛两个阶段进行。
1. 初赛阶段:参赛队伍需要提交相关项目资料和作品视频,由评委会进行初步评审。
通过初赛的队伍将进入决赛阶段。
2. 决赛阶段:参赛队伍需要将制作的机器人和相关设备带到决赛现场进行现场展示和演示。
评委会将根据现场表现对参赛作品进行最终评审。
五、奖项设置中国机器人大赛设有多个奖项,包括一等奖、二等奖、三等奖等。
评选获奖作品时,将同时考虑机器人的技术水平、创新性、功能完善性以及用户体验。
机器人——A类双足人形机器人或多足仿生类机器人竞赛规则
机器人——A类双足人形机器人或多足仿生类机器人竞赛规则机器人竞赛已成为近年来科技领域的一大热点,各类机器人相继问世,展示出了人类科技的飞速发展。
其中,A类双足人形机器人和多足仿生类机器人备受关注。
本文将为您详细介绍A类双足人形机器人和多足仿生类机器人的竞赛规则,旨在促进机器人技术的创新与进步。
一、赛事概述A类双足人形机器人和多足仿生类机器人竞赛的目的在于检验机器人的平衡性、稳定性、智能性等方面的表现。
比赛分为多个项目,包括平衡行走、障碍越过、追踪识别等。
通过这些项目,评估机器人的综合能力和实用性。
二、机器人规格要求1. 外形尺寸规定A类双足人形机器人的高度应在1.5米到2米之间,宽度和深度不得超过0.8米。
多足仿生类机器人的高度和尺寸根据不同赛事的要求进行调整。
2. 机器人动力系统机器人的足部应具备良好的机动性和稳定性,能够平衡行走、迅速转身等。
A类双足人形机器人和多足仿生类机器人动力系统的选用应符合比赛规则的规定,例如电动机、液压系统等。
3. 机器人传感器系统机器人应配备适当的传感器系统,以感知周围环境和判断障碍物。
传感器系统可以包括视觉传感器、声音传感器、力传感器等,以满足比赛项目的需求。
三、比赛项目规则1. 平衡行走项目该项目测试机器人的平衡能力和行走稳定性。
机器人需在指定路线上平稳行走,不得跌倒或踩出路线。
评分将根据机器人完成任务的时间、稳定性和平衡性来确定。
2. 障碍越过项目该项目旨在测试机器人的灵敏度和障碍克服能力。
机器人需要跨越各种高度和宽度的障碍物,如障碍台阶、小桥等。
比赛将根据机器人完成任务的时间和稳定性进行评分。
3. 追踪识别项目该项目考察机器人的视觉识别和智能性。
机器人需要在一片区域内追踪并辨别指定目标,如颜色、形状等。
评分将根据机器人完成任务的准确性和时间来确定。
四、比赛规则的制定与监督1. 比赛规则的制定比赛规则由主办方根据技术发展和参赛者的实际情况而制定。
规则应包括机器人规格、比赛项目、评分标准等内容,并定期进行修订与完善,以适应发展和创新的需要。
机器人比赛项目具体介绍
1、RoboCup足球机器人仿真组(2D 3D)仿真组比赛类似FIFA系列足球游戏,由程序自主控制,完全模拟真人比赛, 比赛的方式是由Robocup委员会提供标准的Soccerserver系统,各参赛队编写各自的CLIENT程序,模拟实际足球队员参加比赛。
Soccerserver是一个允许竞赛者使用各种程序语言进行仿真足球比赛的系统。
一个机器人是Age nt,拥有自己的大脑,是一个独立的"主体"。
而一个球队实际是程序组成的。
服务器的工作就是计算并更新球场上所有物体的位置和运动,发送视觉和听觉信息给球员,接Server,即Soccerserver ,提供了一个虚拟场地,并对比赛双方的全部队员和足球的移动进行仿真。
Client,相当于球员的大脑,指挥球员的运动。
Server和Client之间的通信是通过UDP/IP 协议进行的。
可设定阵型、战术、体力消耗等一系列参数,比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
2、RoboCup足球机器人中型组中型组是由两支各有4个机器人的球队在5X 10米的场地上进行的比赛,每个机器人的尺寸小于50 X 50 X 80cm。
所有的机器人是全自主的,所有的传感器都由机器人自身携带,机器人能使用无线网络与队友、场外Coach机进行通讯。
除了机器人上下场外,不允许人类对比赛进行额外的干预。
因此机器人是全分布式的和全自主的,机器人需要能够完全自主的通过传感器信息完成目标识别和自定位,决定自身采取的动作,控制电机和其它执行机构以完成比赛。
每场比赛分成两个15分钟的半场。
比赛过程由人类裁判控制,裁判具有绝对的权威贯彻比赛规则的执行。
同时有一个助理裁判负责操作裁判盒程序,根据主裁判的判罚发出相应的指令如比赛开始、暂停、开球、任意球等给比赛双方球队的场外Coach机,场外Coach机再将指令通过无线网络发送给场上比赛的机器人。
XXXX中国机器人大赛

XXXX 中国机器人大赛1. 简介XXXX 中国机器人大赛是中国最大规模的机器人比赛之一,旨在推动机器人技术的开展和创新。
本文档将介绍比赛的背景、组织和规那么,并提供一些参赛建议。
2. 背景随着人工智能和自动化技术的快速开展,机器人技术在各个领域中得到广泛应用。
为了推动中国机器人产业的开展,XXXX 中国机器人大赛于20XX年开始举办。
比赛旨在为机器人爱好者提供一个交流和展示的平台,促进机器人技术的创新。
3. 组织XXXX 中国机器人大赛的组委会由多个机器人相关领域的专家组成。
组委会负责制定比赛规那么、安排赛程和评选获奖队伍。
4. 规那么XXXX 中国机器人大赛分为多个工程,每个工程有不同的比赛规那么和要求。
以下是一些常见工程的简要介绍:4.1. 智能机器人足球智能机器人足球工程要求参赛队伍设计和制造能够自主协作与对抗的机器人足球队。
比赛分为自由对抗赛和规那么对抗赛两个阶段。
参赛队伍需要在规定时间内将机器人足球队部署到比赛场地,并完成各项技术挑战和对抗赛。
4.2. 无人驾驶车辆无人驾驶车辆工程需要参赛队伍设计和制造能够自主驾驶的无人驾驶车辆。
比赛分为道路驾驶和特殊场景驾驶两个阶段。
参赛队伍需要在规定时间内让无人驾驶车辆完成指定路线上的驾驶任务,并通过特殊场景的考核,如夜间行驶、障碍避让等。
4.3. 工业机器人应用工业机器人应用工程要求参赛队伍设计和制造能够应用于工业生产线的机器人系统。
比赛分为自动化生产线模拟和实际工业生产线应用两个阶段。
参赛队伍需要在规定时间内将机器人系统部署到生产线上,并完成指定的工作任务,如装配、焊接等。
5. 参赛建议如果你有兴趣参加 XXXX 中国机器人大赛,请参考以下建议:•组建一个多学科的团队:机器人比赛需要技术人员、设计人员和工程管理人员的共同努力。
组建一个多学科的团队能够提供更全面的技术支持和专业知识。
•学习相关技术:参赛队伍需要具备机械设计、电子控制、计算机编程等多方面的技能。
山东科学技术协会-山东机器人研究会
附件3:山东省大学生机器人大赛比赛规则一、基本规则1、每一组参赛的学生和指导教师都应仔细阅读本规则,并了解其含义。
2、参赛选手进入比赛场地时,必须佩带参赛证件并随时接受工作人员或裁判员的核查。
3、各参赛队应自备用于程序设计的计算机和参赛用的各种器材。
4、各项比赛过程中,参赛队员不得变更比赛作品的软件和硬件,如需加固硬件,须经裁判员同意。
5、比赛前30分钟,参赛队员应按比赛要求,将参赛作品摆放到指定区域,没有在规定时间内摆放到位的,取消比赛资格。
比赛开始前,任何人都不能再触摸参赛作品,否则取消比赛资格。
6、比赛过程中只允许裁判员、工作人员和参赛选手进入比赛场地,其他人员不得进入。
7、参赛队员必须服从裁判员,比赛进行中如发生异议,须由领队提出申请复议,由裁判委员会接受和对复议事项做出最终裁决。
8、凡规则未尽事宜,解释、决定权归赛事组委会。
二、双足竞步机器人比赛规则(一)比赛目标制作一个微型双足行走机器人,机器人从起点直立行走至动作区域;立正、然后卧下、向前翻跟斗2次;起立、向前走3步;完成360度旋转;继续行走到达终点(相距5米)。
比赛总时间为10分钟。
(二)竞赛场地及机器人1、场地用白色KT板制成,俯视图尺寸如图1所示。
图1 双足竞步机器人比赛场地俯视图及其尺寸(单位:m)场地侧边线宽度不小于100mm,机器人动作区域放置在距起点1500mm至3500mm的任意位置,宽度为1000mm,开始正式比赛前由裁判组协商后确定位置(所有参赛队的动作区域位置相同)。
2、机器人结构及规格设定结构只有双足(窄足或交叉足,如图2所示),并只能以走路的方式(行走时一足着地,一足脱离地面)来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制(不得以任何通信方式控制)。
(a)窄足(b)交叉足图2 双足竞步机器人(三)器材要求1、机器人必须自成独立系统,不得以任何无线或有线等方式控制机器人的运行。
2、机器人最大尺寸为200mm(长)× 200mm(宽)× 300mm(高)。
机器人大赛规则解释
机器人大赛规则解释l RoboCup足球机器人仿真组(2D、3D)仿真组比赛类似FIFA系列足球游戏,比赛由程序自主控制,完全模拟真人比赛,可设定阵形、战术、体力消耗等一系列参数。
比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
l RoboCup足球机器人小型组比赛在5.5m×4m的绿色地毯场地上进行,采用桔黄色的高尔夫球作为比赛用球,每队由5个机器人组成。
机器人的体积不超过180cm2,高度不超过150mm。
机器人拥有控球、击球装置,可以和赛场外的计算机进行无线通信。
比赛规则与一般足球相似,有点球、任意球、门球、犯规、红黄牌等,上下半场各10 分钟。
l RoboCup足球机器人中型组(2:2 4:4)中型组比赛分为每队2个和每队4个机器人两种不同类型,使用橙色的国际足联标准5号用球,上下半场各10分钟。
机器人的尺寸不超过0.5m×0.5m ×0.8m,在比赛过程中完全自主控制。
l RoboCup足球机器人四腿组四腿机器人足球赛统一使用Sony公司生产的“爱宝”(AIBO)机器狗作为比赛专用机器人,比赛在4.2m×2.8m的绿色场地上进行。
比赛双方各有四个机器人上场,上下半场各10分钟,队员之间可以进行无线通讯,但禁止任何形式的远程控制,从而保证每一支球队都是一个独立系统。
l RoboCup足球机器人类人组比赛以各队自己开发的人形机器人作为比赛专用机器人,分为规定动作部分和自由发挥部分。
规定动作包括单腿站立一分钟、行走、踢球、点球比赛等,自由发挥部分,每队有5分钟时间展示机器人的各个动作,由裁判从技术和艺术两方面进行评分。
l RoboCup救援组比赛“灾难营救”是个重要的社会议题,机器人营救项目在模拟的事故现场寻找及营救受害者,分仿真组和机器人组两个组别。
旨在激发研究创意,使得机器人可以取代人力,在恶劣的环境下进行营救工作。
2023中国机器人大赛规则

2023中国机器人大赛规则引言:2023中国机器人大赛是一项全国性的机器人竞赛活动,旨在推动机器人技术的发展与创新。
本文将介绍该比赛的参赛规则及相关要求,详细阐述参赛机器人的要求、比赛项目及评分标准,以及比赛的组织与管理等内容。
一、参赛机器人要求1.1 外观要求:参赛机器人的外观应符合机器人设计规范,不得有尖锐边角或对人体造成伤害的部件。
机器人外观的美观性和创意性将作为评分因素之一。
1.2 机器人尺寸与重量:机器人的尺寸和重量应符合规定范围,以确保比赛的公平性。
具体的尺寸和重量要求将在比赛规则中详细说明。
1.3 机器人动力系统:机器人的动力系统可以采用电池、气体、液体等不同形式,但必须符合安全性要求。
机器人的动力系统应稳定可靠,以确保比赛的正常进行。
1.4 控制系统:机器人的控制系统可以采用有线或无线方式,但必须确保控制信号的稳定传输和响应速度。
二、比赛项目及评分标准2.1 比赛项目:2023中国机器人大赛将设立多个比赛项目,包括机器人足球、机器人舞蹈、机器人抓取等。
每个比赛项目的规则和要求将在比赛手册中详细说明。
2.2 评分标准:机器人在比赛中将根据不同项目的评分标准进行评分。
评分标准将综合考虑机器人的功能、性能、创新性、稳定性等因素,并给予相应的分值。
评分标准将在比赛手册中明确列出。
三、比赛组织与管理3.1 比赛组织:2023中国机器人大赛将由中国机器人协会主办,各地区机器人协会承办。
比赛将分为预赛和决赛两个阶段进行,预赛将在各地区同时进行,决赛将在全国范围内进行。
3.2 比赛规则:比赛规则将由中国机器人协会制定,确保比赛的公平性和规范性。
规则将明确参赛机器人的要求、比赛项目的规则、评分标准等内容,并对违规行为进行相应的处理措施。
3.3 安全与保障:比赛组织方将确保比赛场地的安全与保障工作,包括现场设备的安全性检查、应急救援措施的准备等。
参赛队伍应遵守比赛场地的安全规定,确保比赛过程的安全顺利进行。
CRC足球机器人项目竞赛规则1226

CRC足球机器人项目竞赛规则1226第一篇:CRC足球机器人项目竞赛规则1226CRC机器人足球项目竞赛规则机器人足球赛竞赛规则2017年04月18日 13:54 来源:中国素质体育网一、概述机器人足球赛(英文名称缩写:CRCF)根据《中华人民共和国体育法》、《中国素质体育机器人运动通用竞赛规则》的有关规定,由国家体育总局社会体育指导中心,中国机器人运动工作委员会遵循机器人足球赛事的规律和特点,深入研究,实事求是,科学编制,制定了机器人足球各级各类赛事竞赛规则,面向全国足球爱好者和广大青少年开展寓教于乐的专项机器人运动体育比赛项目。
以科技为基本元素,以教育培训为基本手段,通过认证的机器人足球运动员均可按组别参加各相关赛事。
机器人足球竞赛规则是机器人足球各级各类赛事的最高法则,各级组织者必须遵照执行。
机器人比赛项目深入贯彻“运动炫科技智慧赢未来”的理念,遵循公平、公正、公开的原则,组织、举办、管理各级各类机器人运动赛事规范举办、健康举办、合法举办。
通过机器人足球比赛项目,彰显机器人运动运动的本质是素质教育。
通过与之相关的数学、物理学、工艺学、动力学、机械制造等学科知识的特点,开展理论知识教学、实践教学等教育教学活动。
机器人足球是集机械原理、组装平衡原理、动力原理等逻辑知识开发的,具有科技、竞技、教育、培训等性能和功能的教学器材、体育竞赛器材。
二、竞赛形式(一)竞赛时间比赛时间共计20分钟,上、下半场各10分钟,中场休息5分钟。
(二)竞赛要求1.比赛时只允许上场运动员进入竞赛区,教练员及替补队员在替补席区域就坐,不得进入竞赛区。
2.比赛开始前参赛队伍指定场上志愿者一名,并负责在竞赛规程允许范围内或在裁判员的指示下负责拿走、移动、重新放置机器人,其他运动员不允许从事此项工作。
3.运动员应熟知比赛的有关规定,所有活动及行为必须遵循竞赛规程,服从赛场有关人员指令。
三、队伍配置(一)队伍组成CRC机器人足球项目竞赛规则图1:足球(单位:cm)五、比赛场地(一)机器人足球(3V3)场地(室内)机器人足球(3V3)比赛场区长10m、宽5m,白色标线宽 0.05m。
中国机器人大赛舞蹈机器人项目双足人形项目方案介绍

中国大赛舞蹈项目双足人形项目方案介绍嘿,大家好!今天我来给大家详细介绍一款参加中国大赛舞蹈项目的双足人形项目方案。
这可是我积累了10年方案写作经验的心血之作,咱们就一起走进这个充满科技与艺术的项目吧。
一、项目背景随着科技的发展,技术在我国已经取得了举世瞩目的成果。
舞蹈项目作为技术的一个重要应用领域,不仅展示了我国在、控制等方面的实力,还让与人类文化、艺术相结合,更具亲和力。
双足人形作为舞蹈的一个重要分支,其动作优美、形态逼真,受到了广泛关注。
二、项目目标1.研制一款具有高度仿真人形外观的双足舞蹈。
2.实现舞蹈动作的流畅性、稳定性,以及与音乐节奏的协调性。
3.在比赛中展示我国技术的实力,为我国赢得荣誉。
三、项目方案1.设计思路(1)机械结构:采用高强度金属材料,模拟人体骨骼结构,实现双足人形的基本形态。
(2)控制系统:采用高性能微处理器,实现动作的控制与协调。
(3)驱动系统:采用电机驱动,实现关节的运动。
(4)传感器系统:采用多种传感器,实现对环境、姿态的感知。
(5)软件系统:开发具有自主学习、自适应能力的舞蹈动作算法。
2.技术路线(1)机械结构设计(2)控制系统设计本项目采用高性能微处理器,实现对动作的控制与协调。
通过编写控制算法,实现舞蹈动作的流畅性、稳定性。
(3)驱动系统设计本项目采用电机驱动,实现关节的运动。
在驱动系统设计过程中,选择合适的电机型号,以满足运动性能的要求。
(4)传感器系统设计本项目采用多种传感器,实现对环境、姿态的感知。
通过传感器系统,能够实时获取自身状态,调整动作,以保证舞蹈表演的顺利进行。
(5)软件系统开发本项目开发具有自主学习、自适应能力的舞蹈动作算法。
通过学习大量舞蹈动作数据,能够自主新颖、独特的舞蹈动作。
四、项目实施1.成立项目组,明确各成员职责。
2.进行项目需求分析,确定项目方案。
3.设计机械结构,制作原型机。
4.开发控制系统、驱动系统、传感器系统软件。
5.进行舞蹈动作编程。
中国工程机器人大赛机器人舞蹈项目双足仿人赛方案介绍

中国工程大赛舞蹈项目双足仿人赛方案介绍嘿,大家好!今天我要给大家详细介绍我们团队为中国工程大赛准备的舞蹈项目双足仿人赛方案。
这个方案凝聚了我们团队的心血,就让我用意识流的方式,给大家呈现这个方案的精彩内容。
咱们得聊聊这个项目的初衷。
舞蹈项目旨在探索技术在舞蹈领域的应用,让成为人类舞蹈的伙伴。
双足仿人赛则是对行走、平衡和舞蹈动作的极致挑战。
我们的目标就是打造一款既能优雅行走,又能跳出惊艳舞蹈的双足仿人。
一、项目背景1.技术发展迅速,应用领域广泛,舞蹈领域尚有巨大潜力。
2.双足仿人行走、平衡和舞蹈动作的研究具有很高的技术含量。
3.中国工程大赛为各路英豪提供了展示才华的舞台。
二、方案设计1.硬件设计(1)双足仿人的身体结构采用模块化设计,便于更换和升级。
(2)选用高性能伺服电机,确保动作的精准和流畅。
(3)搭载高精度传感器,实时监测状态,保证行走和舞蹈的稳定性。
2.软件设计(1)采用ROS(RobotOperatingSystem)作为开发平台,提高开发效率。
(2)编写舞蹈动作算法,实现舞蹈动作的自动。
(3)开发控制系统,实现人机交互,让听从指挥。
3.舞蹈动作设计(1)根据音乐节奏和旋律,设计出富有创意的舞蹈动作。
(2)结合硬件特性,优化动作,确保动作的流畅性和稳定性。
(3)通过多次调试,使舞蹈动作达到最佳效果。
三、项目实施1.组建团队(1)团队成员具有丰富的技术和舞蹈经验。
(2)明确分工,确保项目高效推进。
2.开发周期(1)硬件开发:3个月(2)软件开发:4个月(3)舞蹈动作设计:2个月(4)系统集成和调试:1个月3.项目成果(1)成功研发出一款具备行走、平衡和舞蹈能力的双足仿人。
(2)在比赛中获得优异成绩,为我国技术发展贡献力量。
四、项目亮点1.创新性:将技术与舞蹈相结合,开辟新的应用领域。
2.技术含量:双足仿人的行走、平衡和舞蹈动作具有很高的技术含量。
3.可观赏性:舞蹈动作优美,具有较高的观赏价值。
2023年世界机器人奥林匹克竞赛规则
2023 世界机器人奥林匹克竞赛规则总则:【1】2023国际奥林匹克机器人大赛(WORLD ROBOT OLYMPIAD 2023)竞赛规则由世界机器人奥林匹克委员会(以下简称“委员会”)制定,仅合用于本大赛进行期间。
1.在竞赛当天的早上,将会额外宣布一条特别的规则。
【2】参赛资格和队伍组成1.参赛年龄小学组:1996年1月1日以后出生的学生初中组:1993年1月1日-1995年12月31日之间出生的学生高中组:1990年1月1日-1992年12月31日之间出生的学生【3】注册:本次比赛将采用网上在线注册及网上竞赛的方式,注册地址:,参赛队伍上传所选项目的相关资料,组委会将根据这些资料进行网上预赛,根据预赛成绩选拔优胜队伍参与南沙决赛;请各参赛队在比赛前15天上传资料所需上传资料涉及:常规赛:【1】参与过程的描述或心得体会, 特别经验分享,技术分享等( 500-1000字的描述)【2】各个角度的机器人照片(3张)及制作过程(2张)图片格式规定jpg、gif、png、bmp;尺寸:640×480,500K以内【3】完毕任务视频请将视频编辑为wmv、mov、mpeg、swf格式;大小:10M以内。
【4】使用ROBOLAB或NXT编写的程序创意赛:【1】作品简要说明,字数至少200-500字【2】各个角度的机器人照片(3张)及制作过程(2张)图片格式规定jpg、gif、png、bmp;尺寸:640×480,500K以内【3】完整功能演示视频请将视频编辑为wmv、mov、mpeg、swf格式;大小:10M以内。
【3】作品资料作品资料要包含以下内容:创意来源、结构说明、程序说明、学生制作心得;格式规定:保存为PDF格式,字数至少500字。
2.队伍组成1个教练,2-3名学生【3】器材1.竞赛参赛队伍组装机器人的比赛器材,除规则另有说明外,需为LEGO原厂零部件。
参赛机器人的控制器需为LEGO MINDSTORMSTM RCX或NXT。
工程机器人双足竞步项目交叉足赛
工程机器人双足竞步项目交叉足赛精选文档 TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-2017中国工程机器人大赛暨国际公开赛(RoboWork)双足竞步项目交叉足赛技术报告参赛学校:菏泽学院队伍名称:天泽队参赛队员:隋浩祝远波商滕伟带队教师:周景雷二〇一七年五月摘要机器人技术代表了机电一体化的最高成就,是二十世纪人类最伟大的成果之一,其中双足步行机器人因其体积相对较小,对非结构性环境具有较好的适应性,避障能力强,移动盲区很小等优良的品质,越来越受到人们的关注,因此对其控制研究和步态规划具有相当的现实意义。
本文的主要介绍了双足竞步机器人的国内外发展情况,以及PWM指令算法和舵机的联动控制,通过认真的研究人类行走方式以及翻跟斗的动作,对机器人的行走步态进行简单的规划,设计出简化结构模型,然后以此为基础进行了适当的调整,设计出符合交叉足竞步机器人比赛要求的全部动作程序,设计完成后将程序下载到实验样机中,验证程序设计的可行性和合理性,通过反复的修改和验证使得机器人能顺利的完成比赛任务。
关键词:双足步行机器人;步态规划;PWM控制ABSTRACTRobotic technology represents the electromechanical integration the greatestachievement of the 20th century, is one of the great achievement of human beings, the biped robot robot even though only the history of nearly 40 years, but because of its unique adaptability and human nature, became the robot to an important developing direction of which aims to design a bipedal humanoid robot platform, based on the bipedal robot, walking gait for better finish tasks matting.Because of multi-joint robot has feet, drive and multisensor characteristics, andgenerally have redundant freedom, these features to its control problem has brought great difficulty, but also for various control and optimization method provides an ideal experimental platform, make its attracted many scholars eyes, become a blockbuster research direction, and so the biped robot gait planning and control study not only has high academic value, but also has quite practical on the study of human walking style process and simplify the process after walking with a simplified model, to realize the steering gear PWM robot iseffectively controlled.The paper mainly discussed the dynamic walking planning, design and simulation, detailed research using PWM control technology to achieve the linkage of the steering gear control more than.Keywords:Biped robot;Gait planning;PWM control目录第一章引言/综述 (5)第二章系统整体设计 (5)机器人的简述 (5)机器人的组成 (5)双足机器人的主要研究 (5)第三章机械结构设计 (6)结构简介 (6)动力源的选择 (6)机构具体设计 (6)躯干机构设计 (7)机载安装空间设计 (7)第四章硬件设计 (9)支架 (9)支架参数 (9)支架特点 (9)舵机 (9)舵机特点 (9)舵机参数 (9)锂电池 (10)舵机控制板 (10)STM32F103的结构与功能 (10)参数 (11)第五章软件设计 (14)上位机软件 (14)全局操作窗口 (14)偏差操作窗口 (14)舵机滑块功能介绍 (15)动作数据显示区 (15)动作编写及在线调试窗口 (16)文件操作窗口 (17)舵机调试 (17)第六章系统开发与调试 (17)第七章结论 (18)参考文献............................................ . (19)致谢 (19)第一章引言/综述交叉足机器人是目前机器人研究的主要方向,我们通过计算机器人的质量.舵机角度.自由度等,来调整步幅和步速,本次采用的是STM32F103RBT6单片机作为双足机器人的主核心控制单元,采用了4个180°舵机和2个270°舵机,使其完成走步,前翻,后翻等动作。
第十五届中国青少年机器人竞赛机器人足球比赛规则
第十五届中国青少年机器人竞赛机器人足球比赛规则1 前言2对2机器人足球比赛规则经过几次调整,基本达到强调机器人足球比赛中的技术而不是一味比拼速度和力量的目的,加强了对参赛学生能力的考核,对机器人足球的正常发展是有益的。
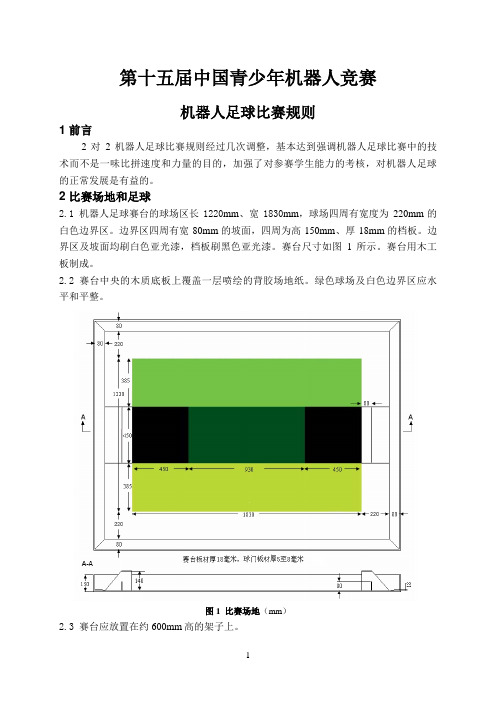
2 比赛场地和足球2.1 机器人足球赛台的球场区长1220mm、宽1830mm,球场四周有宽度为220mm的白色边界区。
边界区四周有宽80mm的坡面,四周为高150mm、厚18mm的档板。
边界区及坡面均刷白色亚光漆,档板刷黑色亚光漆。
赛台尺寸如图1所示。
赛台用木工板制成。
2.2 赛台中央的木质底板上覆盖一层喷绘的背胶场地纸。
绿色球场及白色边界区应水平和平整。
图1 比赛场地(mm)2.3 赛台应放置在约600mm高的架子上。
2.4 球门内宽为450mm,深度为80mm。
每个球门在距地面140mm处有一横梁。
球门内有高度为80mm的后壁。
球门内侧涂成天蓝色,地面为白色。
球门外侧面应涂成亚光黑色。
球门用厚度不超过12mm的木板制成。
2.5 场上有六个发球点和一个开球点,图2中用白点表示,但在场地纸上并未标记。
图2 发球点、开球点和罚球区2.6 参赛队必须根据场馆的照明和磁场条件调整机器人。
比赛组织者将尽力保持较低的照度,并使赛场远离磁场(比如,地板下的布线和金属物体)。
但是,建议各参赛队应设法让自己的机器人能适应各种照明和磁场干扰情况,并能应对场地表面大约5mm高的轻微起伏。
2.7 比赛采用能发射红外线的直径70~75mm的电子球。
每场开赛前,裁判都要检查足球是否损坏。
本届竞赛用球为日本EK公司制造的RoboSoccer RCJ-05足球,使用抗于扰力较强的调制模式。
参赛队必须控制机器人的动力,否则,损坏足球后可能会根据规则5.7.2和6.7被罚出场或取消比赛资格。
3 机器人3.1 机器人必须是经参赛队员启动后能够自动运行的机器人,禁止使用任何遥控方式。
为了策略或备份的需要,每支参赛队可携带三台机器人参赛,但在同一场比赛中只能使用两台机器人且不能更换。
机器人比赛

类人机器人擂台比赛规则1. 机器人标准:1-1.必须有两足,两手,一头;1-2.必须满足足部尺寸大小,整机重量和高度的要求;1-2-1整体站立高度必须在30~40厘米之间;机器人由不少于18个自由度组成(18个伺服电机);1-2-2..高度指从桌面到完全站立的机器人头顶的高度,类似天线的结构不包括在内;1-2-3机器人单个手臂长度比身高短;1-2-4.腿长度由最长的腿来定义,即在腿完全伸长的情况下腿部最上面一个模块的轴到脚底的距离,无论从前后还是左右来量。
(各部尺寸如图所式比例)图一1-2-5.两足分离,两足间不能有连接,请参考图2.图2&3 尺寸限制(参考图3)Weight 重量Sole’s vertical length (X)脚底纵向长度(X)Sole’s horizontal length (Y)脚底横向长度(Y)Foot’s sole max length(Z)脚底最大长度≤3KG ≤120CM ≤75CM 142CM表一1-3. 控制方法:1-3-1.机器人可采用无线遥感控制和其他控制方式。
1-3-2. 对于无线控制器,必须能够支持两个或以上频道。
1-3-3.机器人必须自带电池,电压不超过16V。
1-4. 限制要求1-4-1.机器人不可携带武器、伤害对手或破坏比赛场。
严禁刀片、高速旋转物和其他危险物。
1-4-2.脚底或脚不可带任何吸力装置。
1-4-3.机器人不能带有激光、导航脉冲、电磁铁等故意干扰对手控制器的无线装置。
1-4-4. 机器人不可携带或者向对方喷射液体、粉末或气体。
1-4-5 机器人手部可带拳套,拳套大小为直径8CM的球型海绵式,外面可为皮制或布制材料包裹。
拳套尺寸算在手臂尺寸里。
2. 预备检查2-1. 尺寸检查:检查机器人尺寸,若不符合规定,不可参赛。
2-2 行动检查:机器人必须能够连走5步而不跌倒。
走的时候,一只脚需离地。
机器人前后跌倒,必须能够通过自控或无线控制自行站起来。
7机器人竞步比赛规则

2019 第六届河南省大学生机器人竞赛机器人竞步比赛规则一、比赛简介窄足赛和交叉足赛:设计一个小型双足竞步机器人,模仿体育运动的田径比赛项目,在竞步比赛场地内完成规则要求的比赛任务。
比赛成绩取决于机器人行进的速度,比赛排名由机器人通过的路段长度和走过这一路段所用时间确定。
二、比赛任务1.双足竞步窄足赛:在竞步比赛场地上,小型窄足机器人,以双足步行方式移动,从起跑线出发,通过一个长方形比赛区域,完成比赛规则要求的动作,快速走过终点线。
2.双足竞步交叉足赛:在竞步比赛场地上,小型交叉足机器人,以双足步行方式移动,从起跑线出发,通过一个长方形比赛区域,完成比赛规则要求的动作,快速走过终点线。
三、重要变化1.将竞步比赛场地图纸直接平铺在比赛场馆的室内地面上,其地面的材质以比赛场馆的室内地面为准。
即使用喷绘图纸,不再使用木制场地。
2.在竞步比赛场地的起跑线前增设220mm×400mm 的长方形出发区,出发区的一个长边与起跑线重叠、出发区位于起跑线的居中位置,如图1 所示。
3.参加窄足赛和交叉足赛的机器人,其双足前端紧贴起跑线(且双足不能压线)立正姿势站立在出发区内,等待裁判发令同时计时开始,参赛队员启动机器人开始比赛。
即在满足机器人双足前端紧贴起跑线的条件下机器人只能在出发区400mm 的小范围内做有限的调整。
4.窄足机器人和交叉足机器人,与脚底板相连的舵机允许选择平放或立放在脚底板上。
即与脚底板相连的舵机要么选择平放在脚底板上、要么选择立放在脚底板上。
5.规则明确指出机器人“向前走5 步”,指的是“立正→迈左脚迈右脚(第1 步)→迈左脚迈右脚(第2 步)→迈左脚迈右脚(第3 步)→迈左脚迈右脚(第4 步)→迈左脚并右脚(第5 步/立正)”。
同时禁止先迈右脚。
6.赛制采用一轮比赛、一次上场机会。
竞步比赛规则规则一竞步比赛场地(窄足赛和交叉足赛)规则二窄足赛、交叉足赛套件组装调试的机器人。
即允许这两种情况的机器人同场比赛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人竞技工程(双足竞步、自由体操、仿人竞速等)规则-中国机器人大赛暨RoboCup公开赛-场地制作
————————————————————————————————作者:————————————————————————————————日期:
2014中国机器人大赛暨RoboCup公开赛
2014中国工程机器人大赛(Robot at Work)
机器人竞技工程
(联系人:李汉军)
四种比赛场地的需求数量
1.“竞步窄足赛、竞步交叉足赛”场地(Ⅰ)
2.“竞技体操赛”场地(Ⅱ)
3.“竞技跳远赛”场地(Ⅲ)
4.“竞速标准赛、障碍赛、创意赛”场地(Ⅳ)序号比赛项目场地名称场地数量备注
1
竞步窄足赛
场地(Ⅰ) 4 竞步交叉足赛
2 竞技体操赛场地(Ⅱ) 2
3 竞速标准赛场地(Ⅲ) 2
4 竞速标准赛
场地(Ⅳ) 2 竞速障碍赛
竞速创意赛
比赛现场需要准备的器材、物品、志愿者数量
序号名称窄足/交叉
足用量
体操赛
用量
跳远赛
用量
竞速赛
用量
合计说明
1 比赛场地 4
2 2 2 10 制作要求详见“场地制作”
2 学生课桌16 16 16 16 64
每个场地提供4套
3 橙子16 16 16 16 64
4 电源插座8 4 4 4 20 每个场地附近提供2个
5 绝缘胶带8 8 8 8 32 16mm宽黑色防水电工绝缘胶带
6 数字式秒表 6 3 3 6 18
7 手持扩音器 2 1 1 2 6
8 学生志愿者8 4 4 8 24 每个执行比赛的场地提供4人
一、“竞步窄足赛、竞步交叉足赛”场地[场地(Ⅰ)]
场地数量
比赛现场提供4个场地。
场地制作
规定(该表给出的是制作1个场地所需的材料)
场地(Ⅰ) 图纸
图1 大学组比赛区域(2000mm ×600mm )
图2 青少年组比赛区域(2000mm ×700mm )
场地尺寸 1. 场地为长方形(1张白色实木颗粒板),长×宽为2440mm ×1220mm 。
2. 比赛区域为长方形,由边线、起跑线和终点线构成,详见场地(Ⅰ)图纸。
比赛
区域长×宽为2000mm ×600mm 场地材质 1. 场地制作使用2440×1220×18mm 的白色实木颗粒板。
2. 场地边线、起跑线和终点线使用16mm 宽黑色防水电工绝缘胶带。
场地标识
1. 使用16mm 宽黑色防水电工绝缘胶带,在2440×1220的白色实木颗粒板上,按场地图纸居中对称标识比赛区域。
制作方法
1. 建议到当地建材市场购买2440×1220×18mm 的白色实木颗粒板;
2. 将1张白色实木颗粒板水平放置在平地上,可使用水平仪调节水平位置;
3. 使用16mm 宽黑色防水电工绝缘胶带,按照场地图纸标识尺寸,帖出场地边线、起跑线和终点线。
说 明 1.边线、起跑线(终点线),施工单位不贴!
图1 场地全景图
二、“竞技体操赛”场地
场地数量
比赛现场提供2个场地。
场地制作
规定(该表给出的是制作1个场地所需的材料)
场地(Ⅱ) 图纸
场地尺寸
1. 场地为正方形(2张白色实木颗粒板),其边长为2440mm 。
2. 比赛区域为圆形,由机器人起步区和表演区构成,详见场地(Ⅱ)图纸。
3. 机器人表演区为直线2000 mm 的圆形区域。
中心位置设有直线250 mm 的圆形区域,构成机器人起步区。
场地材质
1. 场地制作使用2440×1220×18mm 的白色实木颗粒板。
2. 机器人起步区和表演区边线使用16mm 宽黑色防水电工绝缘胶带。
场地标识
1. 使用16mm 宽黑色防水电工绝缘胶带,在边长为2440mm 的实木颗粒板场地上,按照场地图纸居中标识机器人起步区和表演区。
2. 比赛现场只提供“白色实木颗粒板材质”的场地,不再提供地毯材质的场地。
要求比赛时机器人在白色实木颗粒板材质的场地上完成体操动作。
制作方法
1. 建议到当地建材市场购买2440×1220×18mm 的白色实木颗粒板;
2. 将2张白色实木颗粒板长边贴缝平放在平地上,四周加装200mm 的护栏,拼接并固定构成比赛场地(场地上表面板间缝隙不能用任何东西加固,以保证场地的平
整度);
3. 使用16mm 宽黑色防水电工绝缘胶带,按照场地图纸标识尺寸,帖出机器人起步区和表演区。
说 明 1. 起步区和表演区边线,施工单位不贴!
图1 场地全景图
图2 场地背面图
三、“竞技跳远赛”场地
场地数量
比赛现场提供2个场地。
场地制作
规定(该表给出的是制作1个场地所需的材料)
场地(Ⅲ) 图纸
场地尺寸
1. 场地为长方形(4张白色实木颗粒板),其长×宽为4880mm ×1220mm 。
2. 沙坑为长方形(如图),其长×宽为3000mm ×800mm 。
场地材质 1. 场地制作使用2440×1220×18mm 的白色实木颗粒板。
2. 助跑线、提示线和起跳线使用16mm 宽黑色防水电工绝缘胶带。
3. 沙坑平铺一层18mm (即一层白色实木颗粒板的厚度)的细沙。
制作方法
1. 建议到当地建材市场购买2440×1220×18mm 的白色实木颗粒板;
2. 将2张白色实木颗粒板短边贴缝平放在平地上,然后再将按场地图纸加工好的2张颗粒板短边贴缝叠放在前面平放好的颗粒板上,四周加装200mm 的护栏,拼接
并固定构成比赛场地,最后将沙坑中平铺一层18mm 厚的细沙;
3. 使用16mm 宽黑色防水电工绝缘胶带,按照场地图纸标识尺寸,帖出600mm 起跑线、300mm 提示线和起跳线。
说 明 1. 起跑线、提示线和起跳线,施工单位不贴!
四、“竞速标准赛”场地
场地数量
比赛现场提供2个场地。
场地制作
规定(该表给出的是制作1个场地所需的材料)
场地(Ⅲ) 图纸
场地尺寸
1. 场地为长方形(3张白色实木颗粒板),其长×宽为3660mm ×2440mm 。
2. 赛道为环形(如图),由2条直线和2个半圆构成,赛道中线长为7278 mm 。
场地材质 1. 场地制作使用2440×1220×18mm 的白色实木颗粒板。
2. 赛道中线和边线(内边线或外边线)使用16mm 宽黑色防水电工绝缘胶带。
3. 起跑线(终点线)使用16mm 宽黑色防水电工绝缘胶带。
场地标识
1. 赛道宽度为500mm ,赛道外边线距场地外缘的最小距离为200mm 。
2. 弯道内边线、中线和外边线的圆周半径分别为520mm 、770mm 和1020mm 。
制作方法
1. 建议到当地建材市场购买2440×1220×18mm 的白色实木颗粒板;
2. 将3张白色实木颗粒板长边贴缝平放在平地上,四周加装200mm 的护栏,拼接并固定构成比赛场地(场地上表面板间缝隙不能用任何东西加固,以保证场地的平
整度);
3. 使用16mm 宽黑色防水电工绝缘胶带,按照场地图纸标识尺寸,帖出赛道中线、边线(内边线或外边线)和起跑线(终点线)。
说 明 1. 赛道中线、边线(内边线或外边线)和起跑线(终点线),施工单位不贴!
图1 场地全景图
图2 场地边框细部图
图3 场地背面图。