理论力学课后习题答案第6章刚体的平面运动分析报告
理论力学课后习题答案第6章刚体的平面运动分析
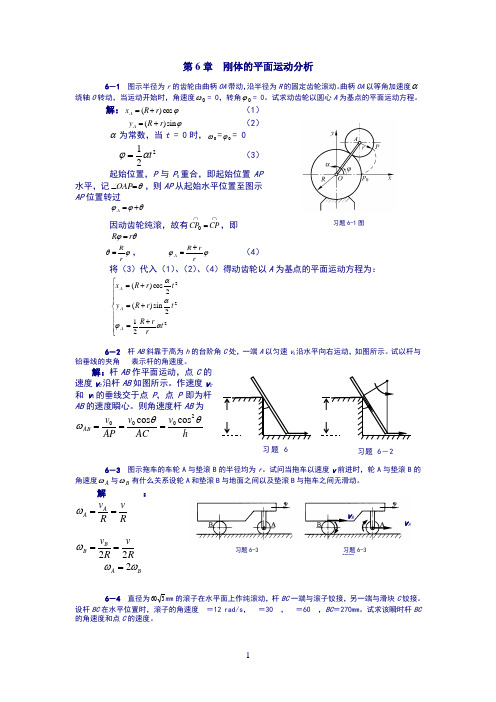
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A += (2) α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R =ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为hv AC v AP v ABθθω2000cos cos ===6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:R v R v A A ==ωR v R v B B 22==ω B A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度=12 rad/s ,=30,=60,BC =270mm 。
理论力学06_4刚体平面运动_加速度

§6.3* 平面运动刚体上点的加速度由于平面运动可以看成是随同基点的牵连平移与绕基点的相对转动的合成运动,于是图形上任一点的加速度可以由加速度合成定理求出。
设已知某瞬时图形内A 点的加速度a A ,图形的角速度为ω,角加速度为α,如图6-13所示。
以A 点为基点,分析图形上任意一点B 的加速度a B 。
因为牵连运动为动坐标系随同基点的平移,故牵连加速度a e =a A 。
相对运动是点B 绕基点A 的转动,故相对加速度a r =a BA ,其中a BA 是点B 绕基点A 的转动加速度。
由式 (5.3.7)可得图6-13 加速度分析的基点法 α (6.3.1) BA A B αα+=由于B 点绕基点A 转动的加速度包括切向加速度和法向加速度a ,故式(6.3.1)可写为t BA a n BAa (6.3.2) n t BA BA A B a a a ++=即平面图形上任意一点的加速度,等于基点的加速度与该点绕基点转动的切向加速度和法向加速度的矢量和。
当基点A 和所求点B 均作曲线运动时,它们的加速度也应分解为切向加速度和法向加速度的矢量和,因此,式(6.3.2)可表示为(6.3.3)n t n t n t BA BA A A B B a a a a a a +++=+在式(6.3.3)中,相对切向加速度与点A 和B 连线方向垂直,相对法向加速度沿点A 和B连线方向从B 指向A ;仅当点A 和B 的运动轨迹已知时,才可以确定点A 和B 的切向加速度a 和及法向加速度和a 。
t BA a n BA a t A t B a n A a n B 在应用式(6.3.2)或(6.3.3)计算平面图形上各点的加速度时,只能求解矢量表达式中的两个要素。
因此在解题时,要注意分析所求问题是否可解。
当问题可解时,将式(6.3.2)或(6.3.3)在平面直角坐标系上投影,即可由两个代数方程联立求得所需的未知量。
例6.3-2:半径为R 的车轮沿直线滚动,某瞬时轮心O 点的速度为v O ,加速度为a O ,如图a 所示。
理论力学习题答案
理论力学习题答案(总26页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--2第一章 静力学公理和物体的受力分析一、是非判断题在任何情况下,体内任意两点距离保持不变的物体称为刚体。
( ∨ ) 物体在两个力作用下平衡的必要与充分条件是这两个力大小相等、方向相反,沿同一直线。
( × ) 加减平衡力系公理不但适用于刚体,而且也适用于变形体。
( × ) 力的可传性只适用于刚体,不适用于变形体。
( ∨ ) 两点受力的构件都是二力杆。
( × ) 只要作用于刚体上的三个力汇交于一点,该刚体一定平衡。
( × ) 力的平行四边形法则只适用于刚体。
( × ) 凡矢量都可以应用平行四边形法则合成。
( ∨ ) 只要物体平衡,都能应用加减平衡力系公理。
( × ) 凡是平衡力系,它的作用效果都等于零。
( × ) 合力总是比分力大。
( × ) 只要两个力大小相等,方向相同,则它们对物体的作用效果相同。
( × )若物体相对于地面保持静止或匀速直线运动状态,则物体处于平衡。
( ∨ )当软绳受两个等值反向的压力时,可以平衡。
( × )静力学公理中,二力平衡公理和加减平衡力系公理适用于刚体。
( ∨ )静力学公理中,作用力与反作用力公理和力的平行四边形公理适用于任何物体。
( ∨ )凡是两端用铰链连接的直杆都是二力杆。
( × )如图所示三铰拱,受力F ,F 1作用,其中F 作用于铰C 的销子上,则AC 、BC 构件都不是二力构件。
( × )图3二、填空题力对物体的作用效应一般分为 外 效应和 内 效应。
对非自由体的运动所预加的限制条件称为 约束 ;约束力的方向总是与约束所能阻止的物体的运动趋势的方向 相反 ;约束力由 主动 力引起,且随 主动 力的改变而改变。
理论力学课后习题与答案解析

第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
理论力学课后习题及答案解析
理论力学课后习题及答案解析文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-MG129]第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A 点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力RB和一个力偶M B,且:如图所示;将RB向下平移一段距离d,使满足:最后简化为一个力R,大小等于RB。
其几何意义是:R 的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力RA和一个力偶M A,且:如图所示;将RA向右平移一段距离d,使满足:最后简化为一个力R,大小等于RA。
其几何意义是:R 的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
理论力学第六章习题答案
解 y x
a
A 动系圆环
a a = a rn + a en + a k
a ay = −rω 2 − 3rω 2 − 2rω 2 = −6rω 2 a ax = 0
B 动系圆环
a a = a rn + aen + a k
y x b y x
e a ay = −a n ( 2 / 5 ) = − 2 rω 2
o
曲柄长 OA = r
并以匀角速度 ω 绕 O 轴转动
o
装在水平
杆上的滑槽 DE 与水平线成 60 角 杆 BC 的速度
试求当曲柄与水平轴的交角分别为 ϕ = 0
30o 时
解
以 A 为动点
以 BC 杆为动系 有
va = ve + vr
在 ϕ = 0° 时 矢量右如图
υ BC = v e =
3 3 va = ωr 3 3
a a = a an + a at = a e + a rt + a rn + a c
式中各矢量如图 把各矢量分别向 x 方向和 y 方向投影得:
a an cos 60° + a at cos 30° = − a e cos 30° − a r cos 30° + a c cos 60° − a rn cos 60° a at sin 30° − a an sin 60° = − a e sin 30° + a rt sin 30° + a c sin 60° − a rn sin 60°
齿 条 又 带 动 半 径 为 0.1m 的 齿 轮 D 绕 固 定 轴 O1 转 动
ω = 5rad/s
理论力学第六章
由 动能定理 FS
由 动 2 mv c 能 4 对t求导,得 C 3 mvC a定 Fv C 理 2 故 Fr J C α
3
v
m
r
C
F
C
F
Cv
S
Cv
即动量矩定理
6-2 质点系动能定理
d LC dt
v
MC
v
6-2-1 动能定理的三种形式 问题 3 图(a)系统由静平衡位置转动 角, 此时,系统势能以静平衡为“0”,
V 1 2 k( l 2
k
) 2 对吗?为什么?
l 2
l 2
对!弹簧静平衡力与重力在转动时仍平衡, 其功之和为零,可同时不考虑。
k
a
又如图(b)所示:
V 1 2
6-2 质点系动能定理
O
m
k
2
b
6-2-2 动能定理的应用 1. 应用特点 (1)与位形变化有关 (突出空间过程) 已知运动求力,由 T W F
FT
WG GS sin
WF 0 ,
N
S
C
WF 0 ,
T
G
C
FS
FN
WF 2 FS S
S
6-1 功与动能
6-1-1 力的功
2.内力的功
一对内力, FA -FB
d W FA drA FB drB
FA drA drB FA drAB
Cv
求 ,v 问题 2均质轮在OA杆上滚动,已知 m,r,l,ω1求Cr 轮 T 。
T 1 2 m vC
2
1 2
JC
2
刚体的平面运动动力学课后答案

其中: 是从速度瞬心 引向M点的矢径, 为平面图形的角速度矢量。
4、平面图形上各点的加速度
基点法公式:
(7-9)
其中: 。基点法公式建立了平面图形上任意两点的加速度与平面图形的角速度和角加速度间的关系。只要平面图形的角速度和角加速度不同时为零,则其上必存在唯一的一点,其加速度在该瞬时为零,该点称为平面图形的加速度瞬心,用 表示。
(b)
再根据对固定点的冲量矩定理:
系统对固定点A(与铰链A重合且相对地面不动的点)的动量矩为滑块对A点的动量矩和AB杆对A点的动量矩,由于滑块的
动量过A点,因此滑块对A点无动量矩,AB杆对A点的动量矩(也是系统对A点的动量矩)为:
将其代入冲量矩定理有:
(c)
由(a,b,c)三式求解可得:
(滑块的真实方向与图示相反)
其中:aK表示科氏加速度;牵连加速度就是AB杆上C点的加速度,即:
将上述公式在垂直于AB杆的轴上投影有:
科氏加速度 ,由上式可求得:
3-14:取圆盘中心 为动点,半圆盘为动系,动点的绝对运动为直线运动;相对运动为圆周运动;牵连运动为直线平移。
由速度合成定理有:
速度图如图A所示。由于动系平移,所以 ,
根据点的复合运动速度合成定理有:
其中: ,根据几何关系可求得:
AB杆作平面运动,其A点加速度为零,
B点加速度铅垂,由加速度基点法公式可知
由该式可求得
由于A点的加速度为零,AB杆上各点加速度的分布如同定轴转动的加速度分布,AB杆中点的加速度为:
再取AB杆为动系,套筒C为动点,
根据复合运动加速度合成定理有:
3-25设板和圆盘中心O的加速度分别为
,圆盘的角加速度为 ,圆盘上与板
理论力学试题题目含参考答案
理论力学部分第一章 静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
( )2.两端用光滑铰链连接的构件是二力构件。
( )3.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
( )4.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
( )5.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
( )6.约束反力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
( )二、选择题1.若作用在A 点的两个大小不等的力1F 和2F ,沿同一直线但方向相反。
则其合力可以表示为 。
① 1F -2F ;② 2F -1F ;③ 1F +2F ;2.三力平衡定理是 。
① 共面不平行的三个力互相平衡必汇交于一点;② 共面三力若平衡,必汇交于一点;③ 三力汇交于一点,则这三个力必互相平衡。
3.在下述原理、法则、定理中,只适用于刚体的有 。
① 二力平衡原理; ② 力的平行四边形法则;③ 加减平衡力系原理; ④ 力的可传性原理;⑤ 作用与反作用定理。
4.图示系统只受F 作用而平衡。
欲使A 支座约束力的作用线与AB 成30︒角,则斜面的倾角应为________。
① 0︒; ② 30︒;③ 45︒; ④ 60︒。
5.二力A F 、B F 作用在刚体上且0=+B A F F ,则此刚体________。
①一定平衡; ② 一定不平衡;③ 平衡与否不能判断。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是。
2.已知力F沿直线AB作用,其中一个分力的作用与AB成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为度。
3.作用在刚体上的两个力等效的条件是。
4.在平面约束中,由约束本身的性质就可以确定约束力方位的约束有,可以确定约束力方向的约束有,方向不能确定的约束有(各写出两种约束)。
清华理论力学课后答案6
vE 10 = 3 = 5.77 rad/s , CE 3
r3 = r1 + 2r2 ,可得轮 1 的角速度 v r +r (顺时针) ω1 = M = 1 2 ω4 = 12ω4 , r1 r1
轮 1 的转速为 (顺时针). n1 = 12n4 = 10800 r/ min ,
kh da
习题解答
作图示几何关系,图中 v A = v ,解得
解法二:在直角三角形△ACO 中,
sin ϑ =
̇ cosϑ = − R x ̇ ϑ x2 ̇ = v, x = R sin ϑ ,解得 AB 杆的角速度为 其中, x
2 ̇ = − sin ϑ v , ϑ cos ϑ R (负号表示角速度转向与 ϑ 角增大的方向相反,即逆时针)
(d) (e) =
再选定销钉 B 为动点,摇杆为动系,如图(c) ,有
a B = aen + aet + ar + ac
由式(d),(e)得 大小: 方向: 向 BO 轴上投影 解出 ae = aBO − ac ,于是摇杆的角加速度为
τ n
a
n BO
a
n e
+
a
t e
+
a r + ac
?
2 RωO
O1B ⋅ ω 2 O1
其中 ae = aC′ = a A + a 大小: 方向: ? √
t c ′A
答
aB
=
aA
案
+
网
杆的角速度为 ω AB =
vA = 1 rad/s ,而 C 点的牵连速度为 C AB A
t a BA
+
理论力学运动学习题及详解
y f 2 (t ) z f 3 (t )
2 2
a x x a y y a z z
2 2 2
v vx v y vz
2
a ax a y az
方向均由相应的方向余弦确定。
第2章 运动学练习
二.基本公式 自然法(轨迹已知时)
运动方程 速度
ae 5 2 0 r 4
5 2a r0 4
B
aC 0
O2
3销钉C固定在AB杆,在滑槽O2D中运动,该瞬时O1A与AB水平,O2D
铅直,且O1A=AC=CB=O2C=r,ω0=常数,求
AB、O2 D、 AB、O2 D .
D
n aCA
(2)加速度分析
AB 0
a 常量, an 0
,点做何种运动( B)。
B.匀变速曲线运动 D.匀变速直线运动
(3)已知点的运动方程为 x 2t 2 4, y 3t 2 3 ,其轨迹方程为(
B)
A.3x 4 y 36 0, C.2 x 2 y 24 0,
第2章 运动学练习
B.3x 2 y 18 0 D.2 x 4 y 36 0
1.选择题:
【练习题】
(4). 如图所示平面机构中,O1A=O2B= r, O1O2 =AB, O1A以匀角速度绕垂直于图 面的O1轴转动,图示瞬时,C点的速度为:( D )
A.
B. C.
Vc 0
Vc r a
2 2
水平向右
O1 A
O2
Vc r0 D. Vc r0
铅直向上 水平向右
2.刚体运动学
基本运动 平面运动
《理论力学》第六章 刚体的基本运动习题全解

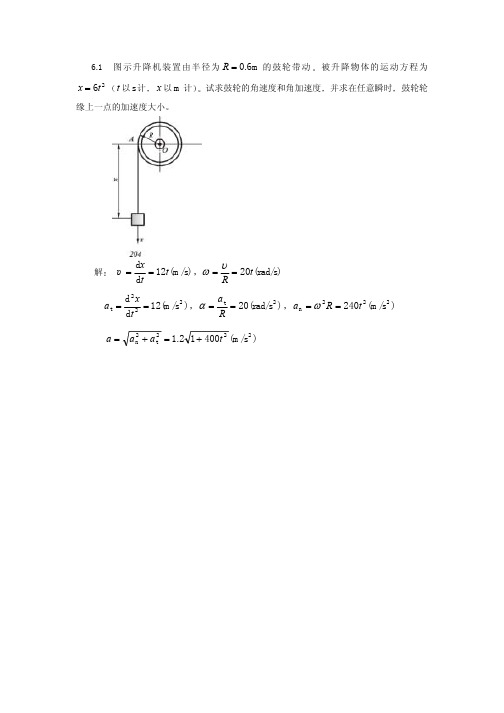
第六章 刚体的基本运动 习题全解[习题6-1] 物体绕定轴转动的运动方程为334t t -=ϕ(ϕ以rad 计,t 以s 计)。
试求物体内与转动轴相距m r 5.0=的一点,在00=t 与s t 11=时的速度和加速度的大小,并问物体在什么时刻改变它的转向? 解:角速度: 2394)34(t t t dt ddt d -=-==ϕω 角加速度:t t dtddt d 18)94(2-=-==ωα速度: )94(2t r r v -==ω)/(2)094(5.0|20s m r v t =⨯-⨯===ω)/(5.2)194(5.0|21s m v t -=⨯-⨯==切向加速度:rt t r a t 18)18(-=-==ρα法向加速度:22222)94()]94([t r rt r v a n -=-==ρ 加速度: 422222222)94(324])94([)18(t t r t r rt n a a n t -+=-+-=+=)/(8165.0)094(0324|24220s m r a t =⨯=⨯-+⨯== )/(405.1581.305.0)194(1324|24221s m r a t =⨯=⨯-+⨯== 物体改变方向时,速度等于零。
即:0)94(2=-=t r v )(667.0)(32s s t ==[习题6-2] 飞轮边缘上一点M,以匀速v=10m/s运动。
后因刹车,该点以)/(1.02s m t a t =作减速运动。
设轮半径R=0.4m,求M点在减速运动过程中的运动方程及t=2s时的速度、切向加速度与法向加速度。
解:t dtd a t 1.04.022-===ϕρα (作减速运动,角加速度为负)t dt d 25.022-=ϕ12125.0C t dtd +-=ϕ2130417.0C t C t ++-=ϕ12124.005.0)125.0(4.0C t C t dtd R v +-=+-⨯==ϕ104.0005.0|120=+⨯-==C v t图题46-251=C0000417.0|2130=+⨯+⨯-==C C t ϕ 02=C ,故运动方程为: t t 250417.03+=ϕt t t t R s 100167.0)250417.0(4.033+-=+-==ϕ速度方程:1005.02+-=t v)/(8.910205.0|22s m v t =+⨯-== 切向加速度:)/(2.021.01.0|22s m t a t t -=⨯-=-== 法向加速度:222)25125.0(4.0+-⨯==t a n ρω)/(1.240)252125.0(4.0|2222s m a t n =+⨯-⨯==[习题6-3] 当起动陀螺罗盘时,其转子的角加速度从零开始与时间成正比地增大。
理论力学哈工大第八版答案
哈尔滨工业大学理论力学教研室理论力学(I)第8版习题答案《理论力学(1 第8版)/“十二五”普通高等教育本科国家级规划教材》第1版至第7版受到广大教师和学生的欢迎。
第8版仍保持前7版理论严谨、逻辑清晰、由浅入深、宜于教学的风格体系,对部分内容进行了修改和修正,适当增加了综合性例题,并增删了一定数量的习题。
本书内容包括静力学(含静力学公理和物体的受力分析、平面力系、空间力系、摩擦),运动学(含点的运动学、刚体的简单运动、点的合成运动、刚体的平面运动),动力学(含质点动力学的基本方程、动量定理、动量矩定理、动能定理、达朗贝尔原理、虚位移原理)。
本书可作为高等学校工科机械、土建、水利、航空、航天等专业理论力学课程的教材,也可作为高职高理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案专、成人高校相应专业的自学和函授教材,亦可供有关工程技术人员参考。
本书配套的有《理论力学学习辅导》、《理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案理论力学思考题集》、《理论力学解题指导及习题集》(第3版)、《理论力学电子教案》、《理论力学网络课程》、《理论力学习题解答》、《理论力学网上作业与查询系统》等。
理论力学(I)第8版哈尔滨工业大学理论力学教研室课后答案前辅文静力学关注网页底部或者侧栏二维码回复理论力学(I)第8版答案免费获取答案引言第一章静力学公理哈尔滨工业大学理论力学教研室理论力学(I)第8版课后答案理论力学思考题集》、《理论力学解题指导及习题集》(第3版)、《理论力学电子教案》、《理论力学网络课程》、《理论力学习题解答》、《理论力学网上作业与查询系统》等。
理论力学(I)第8版哈尔滨工业大学理论力学教研室课后答案前辅文静力学引言第一章静力学公理和物体的受力分析第二章平面力系第三章空间力系第四章摩擦理论力学(I)第8版哈尔滨工业大学理论力学教研室习题答案§4-4 滚动摩阻的概念运动学引言第五章点的运动学*§5-5 点的速度和加速度在球坐标中的投影思考题习题第六章刚体的简单运动§6-1 刚体的平行移动§6-2 刚体绕定轴的转动§6-3 转动刚体内各点的速度和加速度§6-4 轮系的传动比§6-5 以矢量表示角速度和角加速度·以矢积表示点的速度和加速度思考题习题第七章点的合成运动第八章刚体的平面运动动力学引言第九章质点动力学的基本方程第十章动量定理第十一章动量矩定理第十二章动能定理第十三章达朗贝尔原理第十四章虚位移原理参考文献习题答案索引Synopsis哈尔滨工业大学理论力学教研室理论力学(I)第8版课后答案第十四章虚位移原理。
理论力学参考答案第6章盛冬发
第6章 运动学基础一、是非题(正确的在括号内打“√”、错误的打“×”)1.动点速度的大小等于其弧坐标对时间的一阶导数,方向一定沿轨迹的切线。
( √ ) 2. 动点加速度的大小等于其速度大小对时间的一阶导数,方向沿轨迹的切线。
( × ) 3.在实际问题中,只存在加速度为零而速度不为零的情况,不存在加速度不为零而速度为零的情况。
( × ) 4.两个刚体做平动,某瞬时它们具有相同的加速度,则它们的运动轨迹和速度也一定相同。
( × ) 5.定轴转动刚体的角加速度为正值时,刚体一定越转越快。
( × ) 6.两个半径不等的摩擦轮外接触传动,如果不出现打滑现象,两接触点此瞬时的速度相等,切向加速度也相等。
( √ )二、填空题1. 描述点的运动的三种基本方法是矢径法、直角坐标法和自然坐标法。
2. 点做圆周运动,加速度由切向加速度和法向加速度组成,其中切向加速度反映了速度大小随时间的变化率,方向是沿圆周的切线;法向加速度反映了速度的方向随时间的变化率,方向是沿圆周的法线。
3. 质点运动时,如果d d st和22d d s t 同号,则质点做加速运动,反之则做减速运动。
4. 刚体运动的两种基本形式为平动和定轴转动。
5. 刚体平动的运动特征是刚体在运动的过程中其内的任一直线始终和原来的位置平行。
6. 定轴转动刚体上点的速度可以用矢积表示,它的表达式为r ωv ⨯=;刚体上点的加速度可以用矢积表示,它的表达式为v ωr εa ⨯+⨯=。
7. 刚体绕定轴转动时,在任一瞬时各点具有相同的角速度和角加速度,且各点轨迹均为 圆周。
8. 定轴转动刚体内点的速度分布规律为任何一条通过轴心的直径上各点的速度,若将速度矢的端点连成直线,此直线通过轴心。
9. 半径均为R 的圆盘绕垂直于盘面的O 轴做定轴转动,其边缘上一点M 的加速度如图6.23所示,试问两种情况下圆盘的角速度和角加速度的大小分别为:图(a):=ω0;=εRa。
哈工大理论力学教研室《理论力学Ⅰ》(第7版)课后习题-刚体的简单运动(圣才出品)

可得
当
时,
。
解得,Leabharlann ,6-5 如图 6-7 所示,曲柄 CB 以等角速度 ωO 绕 C 轴转动,其转动方程为 =ωOt。
滑块 B 带动摇杆 OA 绕轴 O 转动。设 OC=h,CB=r。求摇杆的转动方程。
7 / 16
圣才电子书
十万种考研考证电子书、题库视频学习平台
杆 BC 的运动规律以及当曲柄与水平线间的交角 φ 为 30°时,导杆 BC 的速度和加速度。
图 6-1 解:建立图 6-2 所示坐标系,由于刚体平动,所以选取 O1 为研究对象,可得
所以
当
时, t=
。
24
解得
4 / 16
圣才电子书 十万种考研考证电子书、题库视频学习平台
6-2 各点都作圆周运动的刚体一定是定轴转动吗? 答:不一定,刚体作平动时,各点也可能都作圆周运动。
6-3 满足下述哪些条件的刚体运动一定是平移? ①刚体运动时,其上有不在一条直线上的三点始终作直线运动。 ②刚体运动时,其上所有点到某固定平面的距离始终保持不变。 ③刚体运动时,其上有两条相交直线始终与各自初始位置保持平行。 ④刚体运动时,其上有不在一条直线上的三点的速度大小、方向始终相同。 答:①②不一定是平移;③④一定是平移。
6-7 刚体作定轴转动,其上某点 A 到转轴距离为 R。为求出刚体上任意点在某一瞬时
的速度和加速度的大小,下述哪组条件是充分的?
(1)已知点 A 的速度及该点的全加速度方向;
(2)已知点 A 的切向加速度及法向加速度;
(3)已知点 A 的切向加速度及该点的全加速度方向;
(4)已知点 A 的法向加速度及该点的速度;
圣才电子书
理论力学_第06章_刚体的平面运动分析_4 (NXPowerLite)

vB= vA+ vBA
x´ 其中, B点相对速度(定轴转动线速度):
(B点绕A点 作定轴转动)
vBA = ω ×rB
任意点的速度 = 基点绝对速度 + B点相对速度 (矢量和)
速度分析: 速度投影法
速度投影定理法:
用速度投影定理分析平面 图形上点的速度的方法
vBA vB
B
rAB B vA A A vA
定轴转动
曲柄滑块机构
直线平移
刚体平面运动的模型简化
刚体平面运动: 刚体上处于同一平面内的各点到固定平面的
距离保持不变 运动轨迹在各平面内
S2面内:
S和A点到S1面的距离相同,S点相对A 点转动或静止(两点间距固定,不可
能相对平动;二者可同时平动);
面内各点运动可由SA直线的运动代表
A1A2线上:
yP
r2 (l-l1) l
sin ωt
平面运动分解(平移+转动)
在t内,平面图形由位置I运动到Ⅱ, 线段从AB运动到A´B´
A点处地安放平移坐标系,其原点A称为基 点。
由平面运动方程可见: A点固定不动,刚体作定轴转动 线段AB方位不变(=常数),刚体作平移
平面运动分解为随基点A的平移(牵连运动)和绕基点A的转动(相对运动)
B 速度分析: 瞬时速度中心法
rAB B A A vA
vA
vB= vA+ vBA vBA = ω ×rB
瞬时速度中心的概念
只有vA和vBA共线时, 合速度才可能为0
y’ vCA
P
C
S
vA
0 A
vA
过A点作vA的垂直线PA,PA上各点的速度由两
理论力学习题解答(第六章)

6-1在图示四连杆机构中,已知:匀角速度O ω,OA =B O 1=r 。
试求在°=45ϕ且AB ⊥B O 1的图示瞬时,连杆AB 的角速度AB ω及B 点的速度。
解:连杆AB 作平面运动,由基点法得BA A B v v v +=由速度合成的矢量关系,知φcos v A BA =v杆AB 的角速度)(/AB /O BA AB 2122+==ωωv (逆时针)B 点的速度2245/r cos v O A B ω=°=v (方向沿AB )6-2. 在图示四连杆机构中,已知:3.021===L B O OA m ,匀角速度2=ωrad/s 。
在图示瞬时,11==L OB m ,且杆OA 铅直、B O 1水平。
试求该瞬时杆B O 1的角速度和角加速度。
解:一.求1ω60230..OA v A =×=⋅=ω m/s取A 为基点,则有BA A B v v v += 得 23.0/6.0ctg v v A B ===ϕ m/sm09.2)3.01()3.0/6.0(sin /v v 2/122A BA =+×==ϕ杆B O 1的角速度67630211../BO /v B ===ω rad/s 顺时针 二.求1ε取点A 为基点,则有n BA A a a a a a ++=+ττBA nB B将上式向X 轴投影21222857s /m .B O /ctg v )sin AB /v (OA ctg a )sin /a (a a a sin a cos a sin a BBA n B n BA A B nBA A n B B +=⋅+⋅+⋅−=++−=−=+−ϕϕωϕϕϕϕϕττ杆B O 1的角加速度7.1923.0/8.57/11===B O a B τεrad/s 2逆时针6-3.图示机构中,已知:OA =0.1m , DE =0.1m ,m 31.0=EF ,D 距OB 线为h=0.1m ;rad 4=OA ω。
大学物理课件 理论力学 第六章 刚体的平面运动
2
例如: 曲柄连杆机构中连杆AB的运动, A点作圆周运动,B点作直线运动,AB 杆的运动既不是平动也不是定轴转动, 而是平面运动.
注意: (1)平面运动刚体内各点的运动是不同 的; (2)不能把平面运动与平动混为一谈。
3
请 看 动 画
4
二、刚体的平面运动可以简化为平面图形S在其自身平面内的 运动
A1A2作平动 A点代表A1A2的运动 ...... S代表刚体的运动
因此,在研究平面运动时, 不需考虑刚体的形状和尺寸,只 需研究平面图形的运动,确定平 面图形上各点的速度和加速度.
5
三.运动方程
为了确定平面图形的运动,取静系Oxy,在图形上任取一 点O’(称为基点),并取任一线段O’A,只要确定了O’A的位
平面图形的运动可以看成是绕它的一系列速度瞬心作瞬时转动。 注意:速度瞬心的加速度不为于零。 4.确定速度瞬心位置的方法
①已知图形上一点的速度vA 和图形角
速度,则速度瞬心
AI vA / , AI vA 且I在 vA顺转向绕A点转90º的方向一侧。
②已知一平面图形在固定面上作无滑动的
滚动(或称纯滚动), 则图形与固定面的 接触点I为速度瞬心。
18
⑤已知某瞬时图形上A,B两点的速度方向相 同,且不与AB连线 垂直.
此时, 图形的瞬心在无穷远处,图形的角
速度 =0, 图形上各点速度相等, 这种情况称
为瞬时平动. (此时各点的加速度不相等)
对④(a)的情况,若vA=vB, 也是瞬时平动.
19
例如: 曲柄连杆机构在图示位置时,连杆BC作瞬时平动.
理论力学刚体平面运动加速度分析
O点为基点
avC = avO + avCnO + avCt O
aCt O = r ⋅α = aO
aCnO
=
r
⋅ω2
=
vO2 r
y
αω
O aO
vO x
aCt O
aCnO aO
C
aC
=
aCnO
=
vO2 r
速度瞬心具有加速度
6-3 刚体平面运动的加速度分析
刚体平面运动的加速度分析解题步骤
1、速度分析:首选速度瞬心法(不选择速度投影 法),求平面运动刚体的角速度。 2、加速度分析:基点法。弄清点的运动是直线还是 曲线.画加速度分析图。未知加速度方向可以假设。 法向加速度方向可确定。 3、利用投影式求未知加速度。 a 加速度矢量式能求解两个未知数 b 投影时应按公式的原始形式进行投影,与坐标轴的 指向一致为正,相反为负。 4 速度瞬心的加速度≠0, 因而速度瞬心法不能用于求加速度。
思考:1、刚体平面运动加速度分析是不 是也有三种方法?
2、速度瞬心的加速度是否为零? 加速度瞬心是否存在?
6-3 刚体平面运动的加速度分析
基点法
运动分解:B点的加速度= 随基点A的平动加速度 + 绕基点A的转动的加速度
avB = avA + avBnA + avBt A
a
t BA
B
aA
αω A
a
n BA
小结
速度分析
1、基点法 vvB = vvA + vvBA
vBA = AB ⋅ ω
2、速度投影法
[vB
] AB
=
[v
A
] AB
3、速度瞬心法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
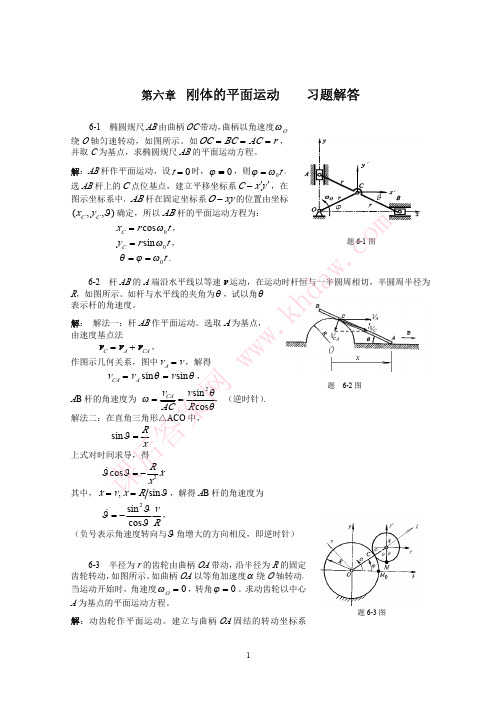
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为hv AC v AP v ABθθω2000cos cos ===6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωR v R v B B 22==ω B A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度=12 rad/s ,=30,=60,BC =270mm 。
试求该瞬时杆BC 的角速度和点C 的速度。
习题6-1图ABCv 0hθ习题6-2图PωABv CABCv ohθ习题6-2解图习题6-3解图习题6-3图v A = vv B = v ωAωB习题6-6图l ϕυl2BO 1ωABυυO1O ABωω习题6-6解图解:杆BC 的瞬心在点P ,滚子O 的瞬心在点D BDv B ⋅=ωBPBD BP v B BC ⋅==ωω ︒︒⨯=30sin 27030cos 36012 rad/s 8=PC v BC C ⋅=ωm/s 87.130cos 27.08=︒⨯=6-5 在下列机构中,那些构件做平面运动,画出它们图示位置的速度瞬心。
解:图(a )中平面运动的瞬心在点O ,杆BC 的瞬心在点C 。
图(b )中平面运动的杆BC 的瞬心在点P ,杆AD 做瞬时平移。
6-6 图示的四连杆机械OABO 1中,OA = O 1B =21AB ,曲柄OA 的角速度ω= 3rad/s 。
试求当示。
ϕ= 90°而曲柄O 1B 重合于OO 1的延长线上时,杆AB 和曲柄O 1B 的角速度。
解:杆AB 的瞬心在O3===ωωOAvA ABrad/s ωl v B 3= 2.531===ωωlv BB O rad/sωω习题6-5图OO 1ABCOO 1ABDCBOϕθ ωCBO ϕθωv C v BPD习题6-4图习题6-4解图ωBCωω习题6-5解图OO 1ABCOO 1ABDv Bv C v A v A v B v Cv DP(a) (b)90DCv Bv CAv ABωOE(a)DED v v =ACBCv ωA v DOE(b)6-7 绕线的卷轴在水平地面上作纯滚动,线上的点A 有向右的速度v A = 0.8m/s ,试求卷轴中心O 的速度与卷轴的角速度,并问此时卷轴是向左,还是向右方滚动?解:如图333.16.08.03.09.0==-=A O v ωrad/s2.1689.09.0=⨯==O O v ωm/s卷轴向右滚动。
6-8 图示两齿条以速度1v 和2v 作同方向运动,在两齿条间夹一齿轮,其半径为r ,求齿轮的角速度及其中心O 的速度。
解:如图,以O 为基点: r v v O O ω+=1r v v O O ω-=2解得:221v v v O +=r v v O 221-=ω6-9 曲柄-滑块机构中,如曲柄角速度ω= 20rad/s ,试求当曲柄OA 在两铅垂位置和两水平位置时配汽机构中气阀推杆DE 的速度。
已知OA = 400mm ,AC = CB = 20037mm 。
解:OA 定轴转动;AB 、CD 平面运动,DE 平移。
1.当ϕ= 90°,270°时,OA 处于铅垂位置,图(a )表示ϕ= 90°情形,此时AB 瞬时平移,v C 水平,而v D 只能沿铅垂, D 为CD 之瞬心 v DE = 0同理,ϕ= 270°时,v DE = 02.ϕ= 180°,0°时,杆AB 的瞬心在B ϕ= 0°时,图(b ),A C v v 21=(↑) 此时CD 杆瞬时平移 421====A C D DE v v v v m/s (↑) 同理ϕ= 180°时,v DE = 4m/s (↓)6-10 杆AB 长为l = 1.5 m ,一端铰接在半径为r = 0.5 m 的轮缘上,另一端放在水平面上,如图所示。
轮沿地面作纯滚动,已知轮心O 速度的大小为v O = 20 m/s 。
试求图示瞬时(OA 水平)B 点的速度以及轮和杆的角速度。
习题6-7图A1vOB2v A1vOB2vv OωO习题6-8图 习题6-8解图习题6-9图习题6-9解图rυ 60ωDE G υOAeυAυe ωC DυFυFEυG解:轮O 的速度瞬心为点C ,杆AB 的速度瞬心为点P 405.020===r v O O ωrad/s 2202==r v O A ωm/sθωcos 5.145sin 220︒==AP v A AB 210==14.1 rad/s)45cos(cos θθ+︒=A B v v9.12)tan 45sin 45(cos 220=︒-︒=θB v m/s6-11 图示滑轮组中,绳索以速度v C = 0.12m/s 下降,各轮半径已知,如图示。
假设绳在轮上不打滑,试求轮B 的角速度与重物D 的速度。
解:轮B 瞬心在F 点 v E = v C 112.012.0102603==⨯⨯=-EB v ωrad/s 06.02121====C E B D v v v v m/s习题6-11图6-12 链杆式摆动传动机构如图所示,DCEA 为一摇杆,且CA ⊥DE 。
曲柄OA = 200mm ,CO = CE = 250mm ,曲柄转速n = 70r/min ,CO = 2003mm 。
试求当ϕ= 90°时(这时OA 与CA 成60°角)F 、G 两点的速度的大小和方向。
解:动点:OA 上A ;动系:DCEA ;绝对运动:圆周;相对运动:直线;牵连运动:定轴转动。
3π4.130π2.0=⨯=⋅=n OA v A ωm/s π37.021e ==A v v m/s 12π74.03π7.0e e =⨯==CA v ωrad/s 48π7254.0===e D E v v ωm/s397.02348π730cos =⋅=︒=E G v v m/s (→) 397.0==G F v v m/s (←)6-13 平面机构如图所示。
已知:OA = AB = 20 cm ,半径r = 5 cm 的圆轮可沿铅垂面作纯滚动。
在图示位置时,OA 水平,其角速度ω = 2 rad/s 、角加速度为零,杆AB 处于铅垂。
试求该瞬时:(1)圆轮的角速度和角加速度; (2)杆AB 的角加速度。
AO Av O BAO Av O BCv A v B P习题6-10图习题6-10解图ωOωABθ 习题6-12图习题6-12解图 F解:(1) 圆轮的角速度和角加速度cm /s 40=⋅=ωOA v A杆AB 瞬时平移,ωAB = 0cm /s 40==A B v vrad/s 8==r vB B ω0n==BA B a a0==raB B α(2)杆AB 的角加速度。
0t=-BA A a a ,22t cm /s 80=⋅==ωOA a a A BA2trad/s 4==ABa BA ABα6-14 图示机构由直角形曲杆ABC ,等腰直角三角形板CEF ,直杆DE 等三个刚体和二个链杆铰接而成,DE 杆绕D 轴匀速转动,角速度为0ω,求图示瞬时(AB 水平,DE 铅垂)点A 的速度和三角板CEF 的角加速度。
解:(1)求点A 的速度0ωωa DE v E =⋅=三角板CEF 的速度瞬心在点F0ωa v v E C ==曲杆ABC 的速度瞬心在点O02ωa OA OCv v CA =⋅=(2)求三角板CEF 的角加速度n t n t FE FE E F F a a a a a ++=+将上式沿水平方向投影0t n ==FE F a a (因为v F = 0)0t==FEa FE CEF α6-15曲柄连杆机构在其连杆中点C 以铰链与CD 相连接,DE 杆可以绕E 点转动。
如曲柄的角速度rad/s 8=ω,且cm 25=OA ,cm 100=DE ,若当B 、E 两点在同一铅垂线上时,O 、A 、B 三点在同一水平线上, 90=∠CDE ,求杆DE 的角速度和杆AB 的角加速度。
A OB Cω习题6-13解图AOB Cωv Av Ba Aa At BA a(a)(b)习题6—14解图v Av Cv Ea Ea E n FE a t Fa n Fa t FEa O(a)(b)(b)解:(1)求杆DE 的角速度cm /s 200=⋅=ωOA v A杆AB 的速度瞬心在点B cm/s 1002==AC v v 对杆CD 应用速度投影定理cm /s5030sin =︒=C D v vrad/s 5.0==DEvD DEω (2)求杆AB 的角加速度ntBA BA A B a a a a ++= 将上式沿铅垂方向投影t0BA a=, 0t ==ABa AB ABα6-16 试求在图示机构中,当曲柄OA 和摇杆O 1B 在铅垂位置时,B 点的速度和加速度(切向和法向)。
曲柄OA 以等角加速度0α= 5rad/s 2转动,并在此瞬时其角速度为0ω= 10rad/s ,OA = r = 200mm ,O 1B = 1000mm ,AB = l = 1200mm 。
解:1.v :0ωr v A =v B //v A ∴ 0=AB ω2102.00=⨯==ωr v B m/s (1) 2.a :ttntnBA A A B B a a a a a ++=+ 上式沿AB 方向投影得:θθθθcos sin cos sin tntnA AB B a a a a +=+即169.0169.0tan tan 12020n t n t ⋅-+⋅=-+=BO vr r a a a a BB A A B αωθθ70.352.0169.0)12102.0(22=⨯+⨯-⨯=m/s 2 (169.04.12.02.02.12.0tan 22==-=θ)4122n==Ba m/s 2 B a :⎪⎩⎪⎨⎧==2t 2nm/s7.3m/s4B BB a a a (方向如图)6-17 图示四连杆机构中,长为r 的曲柄OA 以等角速度0ω转动,连杆AB 长l = 4r 。