习题课A(10月28日PPT)北航理论力学王琪
理论力学习题答案 谢传峰、王琪 高等教育出版社
− F4 cos 450 ⋅ a − F6 cos 450 ⋅ a = 0 F1 ⋅ a + F6 cos 450 ⋅ a − F sin 450 ⋅ a = 0 F1 ⋅ a + F3 ⋅ a − F sin 450 ⋅ a = 0 F3 ⋅ a + F5 ⋅ a − F4 cos 450 ⋅ a = 0
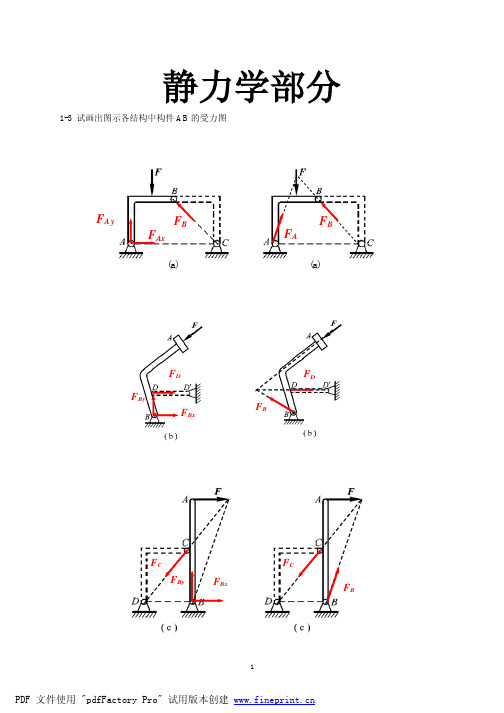
静力学部分
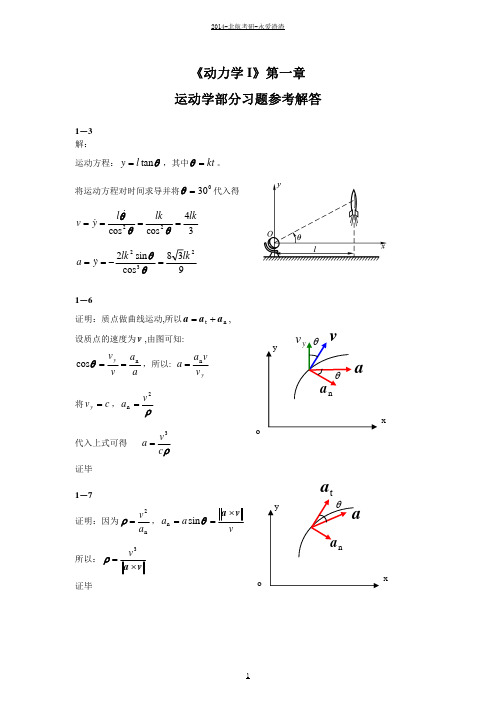
1-3 试画出图示各结构中构件 AB 的受力图
FA y FAx
FB
FA
FB
(a)
(a)
FD FBy FBx FB
FD
FC FBy FBx
FC FB
1
PDF 文件使用 "pdfFactory Pro" 试用版本创建
1-4 试画出两结构中构件 ABCD 的受力图
即棒料左侧脱离 V 型槽,与题意不符,故摩擦系数
8
PDF 文件使用 "pdfFactory Pro" 试用版本创建
2-33 均质杆 AB 长 40cm,其中 A 端靠在粗糙的铅直墙上,并用绳子 CD 保持平衡,如图所示。设
BC = 15cm, AD = 25cm ,平衡时 α 角的最小值为 45o 。试求均质杆与墙之间的静摩擦因数 f s 。
FBx
1-8 在四连杆机构的 ABCD 的铰链 B 和 C 上分别作用有力 F1 和 F2, 机构在图示位置平衡。 试求二力 F1 和 F2 之间的关系。 解:杆 AB,BC,CD 为二力杆,受力方向分别沿着各杆端点连线的方向。 解法 1(解析法) 假设各杆受压,分别选取销钉 B 和 C 为研究对象,受力如图所示: 由共点力系平衡方程,对 B 点有:
F4 = F1 =
2 F 2
北京航空航天大学理论力学课件-王琪-ch5A
O
vx = x &⎫ ⎪ vy = y &⎬ ⎪ vz = z &⎭
2015-10-28
x
加速度
x & & = a x = 0(m/s 2 )
y & & = a y = −10(m/s 2 )
曲率半径 v2 v2 20 ρ= = = m 0 an a cos 30 3
20
ax = & x& ⎫ ⎪ ay = & y &⎬ ⎪ az = & z& ⎭
2、P 点的速度和加速度
2015-10-28 8
理论力学
3、P点的运动轨迹
§5-1 点的运动学
y A P O
θቤተ መጻሕፍቲ ባይዱ
B
ϕ
x
l 2 ⎫ xp = R cosθ + L − R2 sin2 θ ⎪ L ⎬ R ⎪ y p = (L − l ) sinθ ⎭ L
消去上述方程中 参数θ可得 P 点 的轨迹方程。
z
&⎫ 解: v x = x ⎪ vy = y &⎬ ⎪ vz = z &⎭
u
v= x &2 + y &2 + z & = R2ω2 + u2 = const &2 = s
2 a= & x y z &2 + & &2 + & &2 = Rω
ωR
ax = & x& ⎫ ⎪ ay = & y &⎬ ⎪ az = & z& ⎭
T’
•曲率(curvature)
北航 王琪教授讲义
• 在实践的基础上创新
– 在解决问题的过程中“有问题可思考”,“有方法可推敲”, 善于提出自己的观点与方法,培养创新意识。
4
汇报的主要内容
• 目标与理念 • 内容与实践 • 体会与设想
5
内容与实践
1. 探究型课堂教学模式 2. 探究型实践教学平台 3. 科研与教学有机融合
6
1、探究型课堂教学模式 原有的课堂教学模式:
• 实验装置的来源:
– 购置和自制结合
27
数值仿真实验
• 实验目的:
– 应用数值仿真揭示力学现象 – 解决数值仿真中遇到的力学和数学问题 – 定性分析与定量分析的结合
• 实验内容:
– 习题中的数值仿真算例 – 实际工程问题的数值仿真算例
28
数值仿真实验
非光滑质点动力学仿真: 数值 方法给出质点位置、速度和切 向加速度随时间的变化规律
θ 0 = 0 rad , θ 0 = 0 rad/s, f = 0 .1
O
θ
r
mg
θ (t ) θ (t ) θ (t )
t(s)
29
数值仿真实验
掌握应用定性分析 方法判断数值仿真 结果的正确性。
30
数值仿真实验 倒摆数值 仿真实验
A
1 2 1 mLθ + cθ + kθ − mgLsinθ = kbcost 3 2
实现4个结合
• 定性分析与定量分析结合 • 解析分析与数值分析结合 • 理论研究与实际应用结合 • 传授知识与能力培养结合
10
1、探究型课堂教学模式
定性分析与定量分析结合 解析分析与数值分析结合
11
1、探究型课堂教学模式
理论研究与实际应用结合
理论力学课后答案-谢传峰、王琪-动力学第九章、第十章
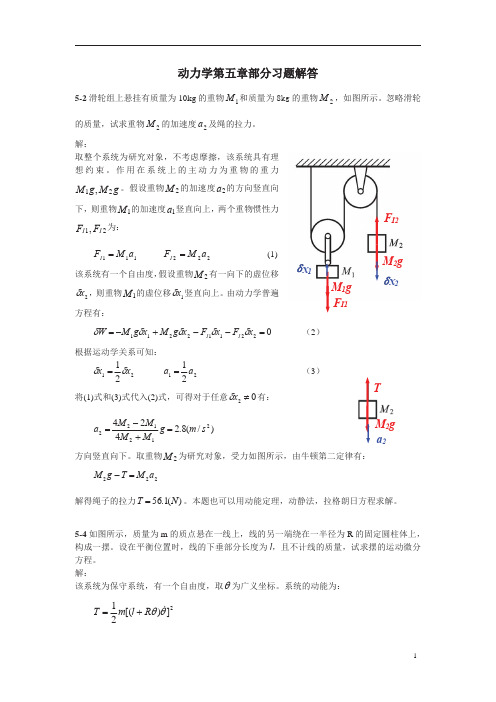
1 2
2l m dx(
x sin )2 0 2l
2 ml 2
2 sin2 3
O C
系统的动能 T T1 T2 。 取 900 为势能零点,则系统的势能为:
V mgl cos
则拉格朗日函数:
L T V 2 ml2 (2
2 sin2 ) mgl cos 3
x
楔块 B 的速度 vB ,以及 B 相对于 A 的相对速度
满足如下的矢量关系(方向如图所示):
vB vA vBr
系统的动能为:
vBr vA
T
1 2
m
Av
A
2
1 2
mBvB 2
P1 2g
x 2
P2 2g
[(x
s cos)2
(ssin)2 ]
1 2g
(P1
P2 )x 2
度
转动。物体的质心 G 在垂直于 O1O2 的直线上,O3G l 。设 O1O2 和 O3G 是物体过 O3
点的惯量主轴,转动惯量为 J1 和 J 2 ,物体对另一过 O3 点的惯量主轴的转动惯量为 J 3 ,试
求物体的动能表达式并建立物体的运动微分方程。 解:
以该物体为研究对象,有一个自由度,取 O3G 和 OC 的夹角 为广义坐标。若以框架 O1O2OC 为动系,则物体的相对运动是以角速度 绕轴 O1O2 的定轴转动,牵连运动是以角 速度
垂直于 O1O2 的平面
z’
O3
θ G
y’
坐标系 O3 x y z 的三个坐标轴为过 O3 点的三个惯量主轴,则系统的动能为:
T
北航理论力学王琪
理论力学
笔记本电脑
问题的引出
硬盘自动保护装置
2010-5-15
4
理论力学
计算机硬盘结构示意图
问题的引出
定点运动刚体动力学问题:研究力与运动间的关系。 问题:用什么方法建立力与运动的关系?
2010-5-15 5
理论力学
§6-2 欧拉动力学方程
z
一、刚体定点运动的动量矩
Ox’y’z’为随体参考系 Oxyz 为惯性参考系 刚体对O点的动量矩:
2010-5-15
x
o
y
y'
整个刚体对O 点的动量矩:
LO = ∑ LOi
7
理论力学
§6-2 欧拉动力学方程
LOi = mi [( y 'i2 + z 'i2 )ω x ' − x'i y 'i ω y ' − x'i z 'i ω z ' ]i ' + mi [− x'i y 'i ω x ' + ( x'i2 + z 'i2 )ω y ' − y 'i z 'i ω z ' ] j ' + mi [− x'i z 'i ω x ' − y 'i z 'i ω y ' + ( x'i2 + y 'i2 )ω z ' ]k '
+ ∑ mi [− x'i z 'i ω x ' − y 'i z 'i ω y ' + ( x'i2 + y 'i2 )ω z ' ]k '
北航《理论力学(第二学期)》考题整理
A
(a)
B
A
(b)
B
A:情况(a)时 AB 杆的角加速度大; B:情况(b)时 AB 杆的角加速度大; C:条件不足,不能确定。 二、 填空题(第 8 小题 5 分,其余每空 4 分,共 65 分, 将计算的最简结果填写在 空格上) 1、定轴转动刚体绕 O 轴在铅垂面内运动,若其质量为 2m,对转轴的转动惯量为 J, 质心到转轴的距离 OC=b,根据系统的广义坐标 (如图 3 所示) , 建立其运动微分方 程。答:运动微分方程为: 2、匀 质 三 角 板 用 圆 柱 铰 链 与 铅 垂 的 AB 杆 和 CD 杆 连 接 , 如 图 4 所 示 。 已 知
=
O
。
已知图示瞬时刚体的角速度为 (方向由 O 点指向 A B 点) ,角加速度为 (方向由 O 点指向 B 点) 。求正
4
A
图7
北京航空航天大学交通科学与工程学院《理论力学(第二学期) 》复习资料
方体上顶点 B 速度 vB 和加速度 aB 。 答:
B 点速度的大小 vB = B 点加速度的大小 aB =
4、两个相同的均质杆 AC、BC(各质量均为 m 长为 L)由铰链 C 连接在图示平面内 运动,已知图示瞬时铰链 C 的速度大小为u,杆的角速度的大小为ω,方向如图 3A-D 所示,则该瞬时图 3_______所示情况,系统得动能最大。
AB=2L,CD=AC=L,各刚体的质量分别为 m1 , m2 , m3 ,若图示瞬时 AB 杆
3
北京航空航天大学交通科学与工程学院《理论力学(第二学期) 》复习资料
的角速度为 (方向如图)。该瞬时系统动量的大小 P=
。
B
O
m2
D
北航理论力学王琪
理论力学
上次课的主要内容
§3-1 刚体平面运动的运动学
研究刚体平面运动速度问题的几种方法: 1、基 点 法: v B = v A + v BA
y
ω
y'
vBA
B
vB β B vA vA
2、速度投影法: [v B ]AB = [v A ]AB
v M = v MP = ω × rPM 3、速度瞬心法:
A r0
上式在铅垂轴上投影: aBA cosθ = aB =
t n
上式在水平轴上投影:
t aBA sin
θ
t = aB
u L u
2
A
B
θ
α AB =
t aBA
u = 2 AB L cosθ
2
α BC
t aB u2 = = 2 tan θ BC L
u2 aB = α AB L = L cosθ
8
2009-12-11
α
ω
vr O ar
a
vr ω= R
u
v &r − ar α =ω &= = R R
v rB = v rO + v rBO v aB = v eB + v rB v aB = v e + v rO + v rBO
12
2、求圆盘最高点B的速度
A
vaB = u − vr − ωR = u − 2vr
2009-12-11
16
理论力学
§3-1 刚体平面运动的运动学
例:图示机构中,AB杆的A端以速度 u 匀速运动,求图示瞬时
DE杆的角速度。已知该瞬时,AB杆与水平线的夹角为450,套
筒D 位于AB杆的中点,DE杆水平。
北京航空航天大学理论力学课件-王琪-ch3A

2015-9-30 8 问题:如何解除多余的约束,使其变为静定问题。
静不定系统实例
B
F C
理论力学
3 A
M
§3-1 刚体系的平衡
B 2 B
M
F
2
C
A 方法一: A
M
F C F C F C
9
方法二:
B
方法三:?
2015-9-30
A
M
B
理论力学
二、刚化原理
§3-1 刚体系的平衡
变形体在某一力系作用下处于平衡,若将处于平衡状 态时的变形体换成刚体(刚化),则平衡状态不变。 F F (a) F (b) 应用该原理,可将刚体平衡的基本理论与方法用于 研究刚体系的平衡问题。
按空间分布形式可分为201593025理论力学32桁架桁架的节点工程上把几根直杆连接的地方称为节点工程上把几根直杆连接的地方称为节点201593026理论力学32桁架榫接木桁架节点201593027理论力学32桁架钢桁架节点铆接焊接201593028理论力学32桁架钢筋混凝土桁架节点刚接201593029理论力学32桁架假设1
15
理论力学
例 已知 R, L, W1, G, W2。 求:圆筒保持平衡的条件。
L
§3-3 刚体系的平衡
问题:有几个力作用在圆筒上? 若研究圆筒,有几个未知量? 解:1、取两个球为研究对象 FC
G
R
FB
W1
R
θ
W2
O
θ
W2
W1
FA
L − 2R 几何关系: cos θ = 2R
2015-9-30
∑ F = 0 ,→ F ∑M = 0
FB
√
F3
理论力学高等教育出版社谢传峰王琪第十一章课件

[注]①减小绳子拉力途径:减小跑车速度或者增加绳子长度。 ②拉力Tmax由两部分组成, 一部分等于物体重量,称为静拉力 一部分由加速度引起,称为附加动拉力。全部拉力称为动拉力。
10
2.第二类:已知作用在质点上的力,求质点的运动(积分问题) 已知的作用力可能是常力, 也可能是变力。变力可能是时间、 位置、速度或者同时是上述几种变量的函数。 解题步骤如下: ①正确选择研究对象。 ②正确进行受力分析,画出受力图。判断力是什么性质的力 (应放在一般位置上进行分析,对变力建立力的表达式)。 ③正确进行运动分析。 (除应分析质点的运动特征外,还要确定 出其运动初始条件)。
1.第一类:已知质点的运动,求作用在质点上的力(微分问题)
解题步骤和要点:
①正确选择研究对象(一般选择联系已知量和待求量的质点)。
②正确进行受力分析,画出受力图(应在一般位置上进行分析)。
③正确进行运动分析(分析质点运动的特征量)。
④选择并列出适当形式的质点运动微分方程(建立坐标系)。 ⑤求解未知量。
11
④选择并列出适当的质点运动微分方程。
⑤求解未知量。应根据力的函数形式决定如何积分,并利用运
动的初始条件,求出质点的运动。 如力是常量或是时间及速度函数时, dv 可直接分离变量 dt 积分 。 如力是位置的函数,需进行变量置换
dv dv v , 再分离变量积分。 dt ds
12
[例2] 煤矿用填充机进行填充, 为保证充 填材料抛到距离为S=5米,H=1.5米的顶 板A处。求 (1)充填材料需有多大的初速 度v0 ? (2)初速 v0 与水平的夹角a0? 解:属于已知力为常量的第二类问题。 选择填充材料M为研究对象,受力如图所示,M作斜抛运动。
北京航空航天大学本科理论力学习题课动.ppt

dvr dvr dR dt dR dt
dR dt
vr
cos
mvr
cos
dvr dR
mR 2
cos
vrdvr R2dR
v2 r
2R2
C
22
aa 0, ae 2R, aC 2 vr
x': 0 ae arx' aC cos450 y': 0 0 ary' aC sin 450
ar
a2 rx '
a2 ry '
12
习题1-10:求滑块A的加速度绳索的拉力。
v0
s FvA
FN
mg
ma F FN mg
x : mx F cos mg
x
(
x2
2R4x R2)2
mx Fx
15
y’
方法三:求滑块的速度
动点:滑块A
vr
动系:ox’y’,x’轴平行于绳
速度分析
θ
运动分析
va v x’ e
绝对运动: 直线运动 相对运动: 直线运动 牵连运动: 定轴转动
va ve vr ve x vr ( )R
y : 0 ve vr sin x : x va vr cos
动点:圆盘中心O 动系:AB杆
A
AB
运动分析: 绝对运动: 直线运动
v r 300 n ae
相对运动: 直线运动 AB 牵连运动: 定轴转动
y'
aa
o ve Rar va
aB et
速度分析
vr 0,
va ve vr va ve
AB
ve OA
va 2R
加速度分析 aa aet aen ar aC
北京航空航天大学理论力学课件-王琪-ch1B
非自由体实例
非自由体的运动受到了限制
2015-9-16 5
理论力学
一、约束与约束力
•约
§1-3 平衡问题的解法
束(constraint):限制物体运动的条件。
•约束体(constraint body):约束非自由体运动的物体。 • 列车是非自由体 ? ? • 铁轨是约束体 • 铁轨作用在车轮 上的力为约束力
北京南站顶棚拱架支座
2015-9-16
13
理论力学
2、连接铰链
§1-3 平衡问题的解法
B A FBy C
FBx
B
' FBy
C
注意:作用力与反作用力的关系
A
B
' FBx
思考题:试画出作用在AB杆B端的约束力(不计销钉质量)
2015-9-16 14
理论力学
§1-3 平衡问题的解法
2015-9-16
15
理论力学
作业要求:
作业:1-3、1-4、1-8
画出研究对象的受力图、速度图和加速度图 一个研究对象画一个受力图 计算题要画相应的图,列写方程,给出计算结果 作业不符合要求的,无作业成绩
每周一 交 前一周的作业
平时成绩占总成绩的20%左右 作业由课代表收齐后,作业放到讲台上的资料袋内
2015-9-16 1
• 基本方法
– 共点力系的合成及其平衡条件(矢量法、解析法) – 受力分析:根据约束的类型和特点画受力图
2015-9-16 27
3、Α.Π.马尔契夫著,李俊峰(清华大学)译《理论力学》高 教育出版社
俄罗斯高校教材(理论深入,内容丰富;是一本很好的力学专业的 教材,例题较少,无习题)
2015-9-16 2
北京航空航天大学理论力学课件_0绪论
理论力学绪论•什么是力学?•力学是怎样发展的?•理论力学的学习目的•理论力学的研究内容•理论力学的研究方法什么是力学?•力学是研究物体机械运动规律的科学。
•物体的机械运动是指物体的空间位形(位置和形状)随时间的变化。
–移动、转动、流动和变形•力学的研究为揭示自然界中与机械运动有关的规律提供了有效的工具,它也是近代工程技术的重要理论基础之一。
力学的发展始终是和人类社会活动紧密联系的,它的发展与完善推动了科学技术和社会的进步。
力学发展遵循认知规律指导实践并发现或提出新问题理性认识(或深入理性认识)感性认识(或初步理性认识)1、建筑与桥梁建于1056年山西应县木塔早期筒体结构建筑比萨斜塔建于1173-1370年观察竹子的特征竹子的横截面比萨斜塔横截面早期建筑的特点:高度低,跨度小,承载能力低,材料为砖石和木材。
赵州桥建于581-599 年跨度:37. 4m拱高:7m早期拱形结构建筑“敞肩拱”的运用为世界桥梁史上的首创,并有“世界桥梁鼻祖”的美誉。
现代筒体结构建筑高度:452米材料:钢筋混凝土吉隆坡双塔大厦建筑物高度增加会产生什么新问题?风载会引起高层建筑物的晃动双塔大厦利用结构阻尼减小塔体的晃动现代大跨度桥梁桥梁跨度增大又会产生什么新问题?美国华盛顿州塔科马悬索桥建造设计风速60m/s破坏时的风速19m/s 建于1940年,桥长853m事后分析引起桥梁振动的原因计算机模拟与仿真地震对建筑物的影响如何减小地震对建筑物的影响?建筑物减震的模拟实验研究美国旧金山国际机场新楼使用了移动地基2、机械手与机器人机械手在工业生产中的应用天津大学研制的医用缝合机械手六足步行机器人步行机器人的应用前景从分析研究人体的行走到双足步行机器人的实现,体现了力学、自动控制和计算机等科学技术的综合应用。
北京理工大学研制力学的发展-车辆与飞机3、车辆与飞机车辆的早期研制与应用早期的农用车辆现代车辆研究提出的要求:舒适、安全、高速、便捷、环保利用计算机分析车辆的动力学问题汽车自动驾驶的实验研究早期直升机—原理的认识现代直升机—科学技术的综合应用社会的发展与进步需要科学技术的不断发展与创新。
理论力学完整ppt课件

主讲 王卫东
可编辑课件PPT
1
可编辑课件PPT
2
绪
论
一、理论力学的研究对象和内容 二、理论力学发展简史 三、学习理论力学的目的 四、理论力学的研究方法
可编辑课件PPT
3
可编辑课件PPT
真汽 车 碰 撞 仿
4
可编辑课件PPT
5
可编辑课件PPT
6
一、理论力学的研究对象和内容
理论力学——研究物体机械运动规律的科学。
可编辑课件PPT
15
都江堰
岷江上的大型引水枢纽工程,也是现有世界上历史最长的无坝 引水工程。始建于公元前256~前251年。
可编辑课件PPT
16
赵州桥(安济桥)
591~599年,跨度37.4米,采用拱高只有7米的浅拱-敞肩拱,
敞肩拱的运用为世界桥梁史上的首创,并有“世界桥梁鼻祖”
的美誉。
可编辑课件PPT
3 随着科学技术的发展,交叉学科的地位也越来越 重要。力学与其它学科的渗透形成了生物力学、爆 炸力学、物理力学等边缘学科,这就需要我们有坚 实的理论力学基础。
4 培养分析问题、解决问题的方法。
可编辑课件PPT
24
四、理论力学的研究方法
是从实践出发,经过抽象化、综合、归纳、建立 公理,再应用数学演绎和逻辑推理而得到定理和结论, 形成理论体系,然后再通过实践来验证理论的正确性。
17
张衡与地动仪
东汉时期,中国发生地震的次数是比较多的,为了测定地
震方位,及时地挽救人民的生命财产,公元126年,张衡在第二
ቤተ መጻሕፍቲ ባይዱ
次担任太史令之后, 就注意掌握收集地震的情报和记录,经过
多年的潜心研究,终于在公元132年(东汉顺帝阳嘉元年),发明
北京航空航天大学理论力学课件-王琪-ch4A

§4-2 约束及其分类
为完整约束的充分必要条件是:
⎞ ⎛ ∂B ∂A ⎞ − ⎟+C⎜ ⎟≡0 ⎝ ∂ q1 ∂ q 2 ⎠ ⎠
定理*(完整约束的充分必要条件)
⎞ ⎛ ∂A ∂C − ⎟+ B⎜ ⎠ ⎝ ∂ q 3 ∂ q1
&1 + Bq &2 + Cq &3 = 0 中的A、B、C是常数 推论*: 若约束方程: Aq
θ
y
l
A
l
y M
l
θ
B
图 3
θ
y
图 4
ϕ ψ
2015-10-14
B
22
图 2
理论力学
§4-3 广义坐标与自由度
思考题:试确定图示系统的自由度。
A B
C
D
2015-10-14
23
理论力学
微小位移投影定理
定理:刚体在运动过程中,其上任意两点的微小位移 在两点连线上的投影相等。 rAB rB = rA + rAB drA i= A i rAB drB = drA + drAB drB rAB B i • drB = i • drA + i • drAB rA rAB • drAB rB = 0 i • drB = i • drA i • drAB = rAB 1 1 2 O rAB • drAB = d(rAB • rAB) = d(rAB) = 0 rAB = rAB = l 2 2 推论:刚体在运动过程中,若其上任意两点的微小位移共 面且不平行,则该两点微小位移垂线的交点的位移为零。
10
s (ϕ = ) R
理论力学
理论力学课后答案-谢传峰、王琪-动力学部分
n a
根据矢量形式的质点运动微分方程有:
m(aat aan ) F FO mg
将该式分别在 x 轴上投影:
m(aat sin aan cos ) FO cos
ve
va
r
M vr
O
r aan
ar
aat
M
根据速度合成定理有 由此可求出: va
va ve v r
ve v 。再根据加速度合成定理有: aa ae ar cos cos
由于绝对运动是圆周运动,牵连运动是匀速直线平移,所以 ae 0 ,并且上式可写成:
aat aan ar
由于动点 M 的绝对速度与动系的选取无关,即 va2 va1 ,由上两式可得:
ve1 v r1 ve2 vr2
(a)
4
2014-北航考研-永爱渣渣
将(a)式在向在 x 轴投影,可得:
ve1 sin 300 ve2 sin 300 vr2 cos 300
由此解得:
vr2 tan 300 (ve2 ve1 ) OM tan 300 ( 2 1 )
vB v A cos
因为
(a)
cos
x2 R2 x
(b)
将上式代入(a)式得到 A 点速度的大小为:
v A R
2
x x R2
2
2
(c)
, x R Rx ,将该式两边平方可得: 由于 v A x (c)式可写成: x
2 (x2 R2 ) 2 R2 x2 x
3理论力学__课后答案_(范钦珊_刘燕_王琪_著)_清华大学出版社
F y1
, Fy 2 =
F sin α j2 sin ϕ
Fy 2 = F cos(ϕ − α )
F y2
(a-1) (b-1)
习题 1-2 图
F y1
(a-2) (a-3)
F
FAy
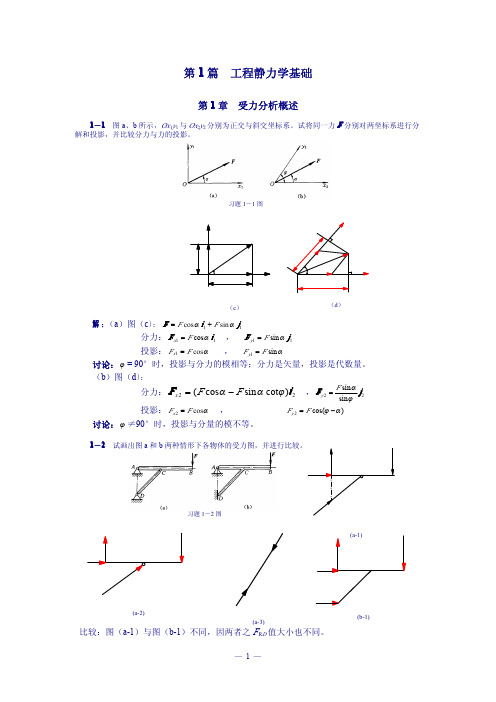
比较:图(a-1)与图(b-1)不同,因两者之 FRD 值大小也不同。
— 1 —
F
C F x1
1-3 试画出图示各物体的受力图。
F ED
习题 3-2 图 (a)
A
(b)
A
解: ∑ Fy = 0 , FED sin α = F
∑ Fx = 0 , FED cos α = FDB
F FED = sin α F FDB = = 10 F tan α
F2
45
�
由图(a)计算结果,可推出图(b)中:FAB = 10FDB = 100F = 80 kN。
求此时工件 H 所受的压紧力。
习题 3-5 图
3–6 图示液压夹紧机构中,D 为固定铰链,B、C、E 为铰链。已知力 F,机构平衡时角度如图所示,
A
F FNB B FBC FCB C FCE
习题 3-6 图 (a)
FCD
FEC FNH
(b)
— 2 —
FRA
x FH
(c)
解:以铰 B 为研究对象,受力如图(a) 。
习题 1-3 图
F
(a-1) (b-1) 或(b-2)
FAx
F
或(a-2) (c-1)
D B
F
C C
A
C
FAy
α
B
D
(d-1)
或(d-2)
FD
北京航空航天大学理论力学课件-王琪-ch1A
静力学(STATICS)
第一章 质点的平衡 第二章 刚体的平衡 第三章 刚体系与结构的平衡 第四章 质点系的平衡
2015-9-14 1
理论力学
第一章 质点的平衡
•平 衡(equilibrium): 物体在惯性参考系中处于静止或匀速直线平移状态。 要研究的问题: • 如何建立力学模型 • 如何进行受力分析 • 如何寻找平衡规律
2015-9-14 3
理论力学
水星 金星 地球 火星 木星 土星 天王星 海王星
海王星的发现(1846年):
§1-0 力学模型与力系
研究太阳系中行星轨道动力学问题时,太阳和行星可视为质点。
根据观测到天王星的轨道摄动,推测出海王星的存在及其可能的位置。
2015-9-14 4
理论力学
§1-0 力学模型与力系
FR = F1 + F2 + F3
设 { F 1 , F 2 , L F n } 为作用在A点的共点(汇交)力系
{ FR } = { F1 , F2 , L Fn }
2015-9-14
FR = F1 + F2 + L + Fn = ∑ Fi 矢量和
12
问题:该结论是否适用于非共点力系?
理论力学
1、力在轴上的投影
2010年8月
2015-9-14
2
理论力学
§1-0 力学模型与力系
研究对象的力学模型:质点、刚体、质点系
θ1 θ 2
•质点(particle):具有质量其形 状和大小可忽略不计的物体。 •特点:所研究的问题与物体的
mg A
mg B
形状、姿态无关(或其影响因 素可忽略不计)。
问题:已知物体(A、B)的质量,若求物体平衡时两个绳索 的拉力,哪个物体的形状和尺寸的大小可以忽略不计?
北京航空航天大学理论力学第一学期总复习.ppt
M
vM
CV
13
BUAA
4、平面图形上各点的加速度
aB
aA
aBnA
a
t BA
aBt A AB aBnA AB 2
y
y' aBt A
B
A
aBnA x'
o
aA x
•加速度瞬心:在某瞬时,平面图形上加速度为零的点。 当平面图形的角速度与角加速度不同时为零时,必存
处的静/动摩擦因数均为f。现欲以水平力F 拉动此物体。若F
较小未拉动物体时,根据已知条件 b 能分别求出A,B
两处的静摩擦力。若物体被拉动,则在其运动过程中A,B 两
处的摩擦力 b
相等。
FA
FI
FB
a:一定;
2019/11/16
b:一定不; c:不一定
26
BUAA
基本概念:惯性积、惯量主轴、
中心惯量主轴、动平衡、静平衡
在唯一的一点,在该瞬时其加速度为零。
要求:能熟练求解刚体平面运动和点的复合运动的综合 性问题。
2019/11/16
14
BUAA
思考题:半径为 R 的圆盘做平面运动,已知某瞬时圆盘边缘 上两点A、B的加速度a (大小、方向如图所示),试判 断下列结论哪些是正确的:
A:这种运动不存在; B:能求出圆盘的角速度(大小和方向) C:能求出圆盘上任一点的加速度; D:能求出圆盘的角加速度(大小和方向)
dp
dt
Fi(e) maC
miaCi
Fi ( e )
m dvC dt
Fi ( e )
dm dt
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题课I
2009-10-28 1
BUAA
对于刚体: •主矢 •主矩
平衡条件
基本原理与定理
{F1 , F2 , L , Fn } = {FR , M O }
FR = ∑Fi = ∑Fi '
i =1 n n
M O = ∑ M i = ∑ ri × Fi
n
i =1
n
FR = 0, M O = 0
1
2
C
D
设:杆1的长度为L
2009-10-28
dL < 0
28
BUAA
C D
E
C D 设:CD杆的长度为L dL > 0
2009-10-28 29
BUAA
思考题:系统如图所示。若人重W < > 板重P且人有足够大的 力量。下列两种情况中,哪个系统能在图示位置维持平衡?
(a)
(b)
A:图(a)
2009-10-28
z
F1
o
FR
F2
y
⎧ ∑ M l1 = 0 ⎪ ⎨ ∑ M l2 = 0 ⎪ ⎩ ∑ M l3 = 0
确定三根轴的位置
4
x
2009-10-28
Fn
BUAA
题8:给出空间平行力系平衡方程的三矩式
z
FR
Fi
y
o
x
MO
⎧∑ M x = 0 ⎪ ⎨∑ M y = 0 ⎪ ⎩∑ M L = 0
如何确定L轴?
2009-10-28
F1
D:力螺旋
F2
3
BUAA
题5:空间汇交力系的平衡方程独立的充分必要条件:
⎧ ∑ Fx = 0 ⎪ ⎨∑ Fy = 0 ⎪ ⎩ ∑ Fz = 0
A:三个轴正交; B:三轴不共面; C:三轴相交不共面; D:三轴的单位向量不相关
题6:空间汇交力系的平衡方程能否用取矩式给出? 题7:给出空间汇交力系的平衡方程的三矩式:
a f< b a f≥ b
fWA 则 WB ≤ (1 − f b a)
则 WB 可以任意大
ϕ < ϕmax
b
b
FR ϕ
< a = tan β
ϕm
a
β WA
ϕ ≤ ϕ max < β
2009-10-28
23
BUAA
a 几何解释: f = b
tan ϕ m = f
ϕ ≤ ϕmax
b a
ϕm
β
a = tan β = b
2009-10-28
l3
FR = 0
6
BUAA
题10:系统如图所示,指出正确的受力图。
2009-10-28
7
BUA-28
8
BUAA
题12:系统如图所示,不计所有摩擦,指出其中的平衡系统。
2009-10-28
9
BUAA
题13:确定支座A的约束力方向(不计构件自重和所有摩擦) C B A
2009-10-28 18
BUAA
题23:作业习题分析:已知P,M,D,求平衡时的摩擦系数 方法一 M P
FN 1 FS 1 FN 2
平衡条件
FS 2
无滑动临界条件
∑ ∑ ∑
2
Fx = 0 Fy = 0 M
o
F S 1 = fF N 1 F S 2 = fF N 2
f1 <1 f2 >1
= 0
af
B:图(b)
C:图(a)和(b)
30
BUAA
例: 求图示结构中, CB 杆上C 端的约束力和杆1的内力. 已知:M, P, AE=EC=CD=DB=DH=EG=L,P作用在销钉C上
A
E 1
C
D
B
F1
FGA
G FGH
M
P
H
FCy C
解题思路: G 1、研究销钉G 2、研究结构右半部分 3、研究整体
2009-10-28
A
=0
WB
不滑动条件:F ≤ fFN
2009-10-28
FN a − Fb − WA a = 0
b FN = F + WA a
22
BUAA
b WB (1 − f ) ≤ fWA a
b (1)当 (1− f ) > 0 a b (2)当 (1− f ) ≤ 0 a
a 几何解释: f < b
tan ϕ m = f
0
P C
B
AC tan(450 − ϕ m ) = BC tan(450 + ϕ m )
1− tanϕm 1+ tanϕm AC = BC 1+ tanϕm 1− tanϕm
2009-10-28
1− tanϕm BC =± 1+ tanϕm AC
< 450 +
tan ϕm1 ≈ 0.224
20
三力汇交有: 0 < ϕm
M F
C
M1
B
F1
A
应用二力平衡原理(二力构件)
10
2009-10-28
BUAA
题14:确定支座A的约束力方向(不计构件自重和所有摩擦)
C A
M1
C B
M2
M1
B
A
M1 > M 2
2009-10-28
11
BUAA
题15:确定支座A的约束力方向。不计构件自重和所有摩擦
A
M
M
O
B
2009-10-28
结论:L 轴与 OZ 轴为异面直线
2009-10-28
5
BUAA
题9:四面体上作用有一空间任意力系,对该四面体六根轴 的取矩方程成立是否是平衡的充分条件。
MO
FR
l1
o
l2
⎧ ∑ M l1 = 0 ⎪ ⎨∑ M l2 = 0 ⎪ M =0 ⎩ ∑ l3
Mo = 0
⎧ ∑ M l4 = 0 {F1 , F2 , L , Fn } = {FR , M o } ⎪ ⎨ ∑ M l5 = 0 平衡条件: FR = 0 M o = 0 ⎪ ⎩ ∑ M l6 = 0
+ bf + c = 0
f2 > 1
若取
2009-10-28
FN 1 < 0
19
BUAA
方法二 d D O A
ϕm ϕm
M d= = 3.75cm P AC = R cos450 + d
BC = R cos450 − d
CD tan(45 − ϕ m ) = AC CD tan(450 + ϕ m ) = BC
2009-10-28
a
FB
25
BUAA
O
题26: 下图中的系统是否是静定结构?
B
D
B
D
C A G
2009-10-28
C E 瞬态机构 A G 静定结构 E
26
BUAA
题27: 下图中的系统是否是静定结构?
F
A
题28: 确定上图结构中铰链B约束力的方向
2009-10-28
B
27
BUAA
题29:确定杆1和杆2是受拉力还是受压力
BUAA
a
A
a
WA
O
题24:已知 WA, a,b,f。 求平衡时, WBmax
b
WB
21
2009-10-28
BUAA
a
A
a
WA
O
FN
b O
FOy
WB
F
解:1、研究圆盘
FO x W R − FR = 0 B
∑M
O
=0
F Ay
A
F = WB
2、研究板
FAx
F
WA
FN
WB (1 − f
∑M
b ) ≤ fWA a
D
B
FCx FGH
H
31
FB
BUAA
解: 1、研究整体
FAy
A
E
C
D
B
∑M
A
= 0 → FB
FAx
1 G
M
P
H B
2、研究分离体
FB
∑M = 0 → F ∑F = 0 → F ∑F = 0 → F
C x y
GH
FCy C
D
Cx Cy
FCx FGH
H
FB
F1
FGA
G FGH
3、研究销钉G
F1 = FGH
12
BUAA
题16:确定铰链A、B处约束力的方向 (不计构件自重和所有摩擦)。
先研究AD杆
A
D
F
再研究整体 B
L 2009-10-28 L L
C
13
BUAA
题17:确定支座A、B处约束力的方向 G E E C E G
M
D
H
M
C C
FB
D B
A A B
A
FA
应用:三力平衡定理、力偶的性质、刚化原理
i =1
i =1
两个力系等效条件: 两个力系的主矢相等、主矩也相等
2
2009-10-28
BUAA
题1: 空间平行力系简化的最简结果可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题2: 一对平行不共线的力简化的最简结果可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题3: 两个平面汇交力系构成的平面力系简化的最简结果 可能是: A:平衡力系、B:力偶、C:合力、D:力螺旋 题4: 图中的两个力构成的力系简 化的最简结果可能是: A:平衡力系、B:力偶、 C:合力、