mazak 小巨人 马扎克 伺服报警说明
伺服报警说明

伺服、主轴驱动器检测作业指导书1.伺服驱动器的性能检测2.1 按照伺服驱动器上的端子标示将两相220V、三相220V、地线及电机动力线对应接好。
上电前一定要检查接线正确。
2.2 给伺服驱动器供电,伺服驱动器的显示板要显示正常,不能出现无显、少笔、部分显示暗。
按键功能要正常,不允许出现按键无效、按键卡死等不合格产品。
2.3 设置参数。
根据产品型号的不同,参数的设置也有所不同。
具体参数的设置如下表:型号参数设置160 160-020 PA--0设为2000,PA--2设为12560,PA--4设为4,PA--32设为5160-03016B 16B-020 PA--0设为2000,PA--2设为12560,PA--4设为4,PA--32设为516B-03016L 16L-050 PA--0设为2000,PA--2设为6560,PA--4设为4,PA--32设为516L-07518D 18D-025 PA--2设为4000,PA--3设为40 18D-050 PA--2设为1000,PA--4设为4 18D-075 PA--2设为1000,PA--4设为4 18D-100 PA--5设为1000018D-150 PA--5设为1000018D-200 PA--5设为1000018S18S-025 使用初始值18S-050 使用初始值18S-075 PA--33设为4500,PA--34设为45018S-100 PA--33设为6000,PA--34设为1500,PA--35设为150018S-150 PA--33设为6000,PA--34设为3800,PA--35设为1350参数设置完毕后,选择世纪星程序运行。
如无法正常运行,看伺服驱动是否使能并准备好。
如无使能,则不合格。
运行过程中伺服驱动器可能会报警,报警代码从A1到A16,详情见下表:160、16B、16L系列伺服驱动器报警详情一览表报警代码报警名称处理方法1 主电路欠压接通主电源时①检查供电电源②换伺服驱动器电机运行过程中①检查负载情况②换伺服驱动器2 主电路过压接通控制电源时换伺服驱动器接通主电源时检查供电电源电机运行过程中①换伺服驱动器②检查外部制动电路3 IPM模块故障接通控制电源时换伺服驱动器电机运行过程中①换伺服驱动器②检查检查U、V、W之间接线是否短路4 制动故障接通控制电源时换伺服驱动器电机运行过程中①检查主电源②换伺服驱动器5 保险丝熔断电机运行过程中①检查U、V、W之间接线是否短路②换伺服驱动器6 电机过热接通控制电源时①检查伺服驱动参数STA-12是否为1,不是则改为1保存,断电后重新上电②更换伺服驱动器电机运行过程中①检查机械部分②更换伺服驱动器7 编码器A、B、Z故障①检查编码器接线②换伺服驱动器③更换电机8 编码器U、V、W故障①检查编码器接线②换伺服驱动器③更换电机9 控制电源欠压①检查控制电源②换伺服驱动器10 过电流①检查U、V、W之间接线是否短路②换伺服驱动器③检查伺服电机11 系统超速接通控制电源时①换伺服驱动器②更换伺服电机电机刚启动时①更换伺服电机电机运行过程中①换伺服驱动器②更换伺服电机③换编码器电缆12 跟踪误差过大接通控制电源时换伺服驱动器电机刚启动时①检查U、V、W接线是否正确②换伺服驱动器③更换伺服电机电机运行过程中①换伺服驱动器②更换伺服电机13 软件过热换伺服驱动器14 控制参数读错误①检查控制电源电压②换伺服驱动器15 DSP故障①检查控制电源电压②换伺服驱动器16 看门狗故障①检查控制电源电压②换伺服驱动器18D系列伺服驱动器报警信息一览表报警号报警信息处理方法A-1 主电源电压低于300V ①检查主电源电压②更换伺服驱动器A-2 主电源电压高于780V ①检查主电源电压②更换伺服驱动器A-3 逆变器功率器件故障更换伺服驱动器A-4 制动电路故障更换伺服驱动器A-5 主电源输入缺相①检查主电源相数②更换伺服驱动器A-6 伺服电机过热①检查参数STA-12(为1是正确的)②更换伺服驱动器A-7 编码器A、B、Z故障①检查编码器电缆②更换伺服驱动器③更换电机A-8 编码器U、V、W故障①检查编码器电缆②更换伺服驱动器③更换电机A-9 控制电源欠压①检查控制电源电压②更换伺服驱动器A-10 逆变器过流故障②更换伺服驱动器A-11 电机超速①更换伺服驱动器②更换电机A-12 跟踪误差过大①检查码盘线、指令线是否松动②检查伺服参数(23控制方式,24极对数)③更换伺服驱动器④更换伺服电机A-13 系统过载①更换伺服驱动器②检查码盘线、指令线是否松动A-14 系统参数错误①检查伺服参数②更换伺服驱动器A-15 控制板电路故障更换伺服驱动器A-16 DSP故障更换伺服驱动器A-17 驱动器过热更换伺服驱动器18S系列主轴驱动器报警信息一览表报警号报警信息处理方法A-1 主电源电压低于300V ①检查主电源电压②更换主轴驱动器A-2 主电源电压高于780V ①检查主电源电压②更换主轴驱动器A-3 逆变器功率器件故障更换主轴驱动器A-4 制动电路故障更换主轴驱动器A-5 主电源输入缺相①检查主电源相数②更换主轴驱动器A-6 主轴电机过热①检查参数STA-12(为1是正确的)②更换伺服驱动器A-7 编码器A、B、Z故障①检查编码器电缆②更换主轴驱动器③更换电机A-8 编码器U、V、W故障①检查编码器电缆②更换主轴驱动器③更换电机A-10 过电流故障①更换主轴驱动器A-11 电机超速①更换主轴驱动器②更换电机A-12 跟踪误差过大①检查码盘线、指令线是否松动②检查驱动器参数(23控制方式,24极对数)③更换主轴驱动器④更换伺服电机A-13 系统过载①更换主轴驱动器②检查码盘线、指令线是否松动A-14 系统参数错误①检查伺服参数②更换主轴驱动器A-15 控制板电路故障更换主轴驱动器A-16 DSP故障更换主轴驱动器A-17 驱动器过热更换主轴驱动器3.检测完成后操作伺服驱动能正常运行完程序,并且没有出现以上的报警现象、显示正常、风扇能正常运行的驱动器则是合格品。
LGmazak伺服报警 (2)

报警检 查阶 意义:NC向驱动器发送数据时发生错误C和驱动单元、电池单元和驱动单元、驱动 接头松动。
1
单元和驱动单元之间的电缆连接是否牢固。接头
处是否承受过大的外力。
正常
2
关闭电源,用万用表检测项目1中的通讯电缆。 电缆问题
可以通过更换新电缆来判断。
电缆正常
更换过
3
确认NC和驱动单元的软件版本是否近期更换过。
未更换
4
与另一轴的正常驱动器进行交换,判断故障是驱 驱动器问题
动器问题还是NC问题。
不是驱动器问题
无异常原因
5
检查驱动器安装环境 (例:环境温度,噪音,
接地)
环境因素异常
处理方法 正确连接 进行2步 更换电缆 进行3步 恢复为原版本 进行4步 更换驱动器 进行5步 更换NC的MCP卡 根据产生原因采取措施 例:高温……检查冷却风扇
接地……增加接地
MAZAK 马扎克车床参数报警

处理
59 PLC 停止 PLC 处于停止中。 ( , , ) F H P 红
原因
起动 PLC。
处理
如果未能解除报警,请与 MAZAK 技术服务中心或技术中心联系。 ( , , )
原因
处理
66 参数异常 —— 请与 MAZAK 技术服务中心或技术中心联系。 ( , , ) E H O 蓝
原因
处理
67 不能高速同时攻丝的轴存在 ( , , ) E H O 蓝
原因
——
处理
2
—— 紧急停止 硬件发生故障。 ( , , ) E H M 红
原因
即使电源再接通仍然不能解除时,请与 MAZAK 技术服务中心或技术中心联系。
处理
3 紧急停止 按下了操作面板上的紧急停止按钮。 ( , , ) A H M 红
原因
释放紧急停止按钮,将 NC 系统复位至初始状态。
处理
4 —— —— ( , , )
原因
处理
断开 NC 与机械的电源,解除负荷后重新接通电源。 如果未能解除报警,请与 MAZAK 技术服务中心或技术中心联系。 ( , , )
原因
处理
81 主轴参数错误 —— 请与 MAZAK 技术服务中心或技术中心联系。 ( , , ) E H O 蓝
原因
处理
82 主轴警告 —— 请与 MAZAK 技术服务中心或技术中心联系。 ( , , ) E H O 蓝
原因
请与 MAZAK 技术服务中心或技术中心联系。
处理
12 绝对位置警告 绝对位置检测系统发生异常。 (报警号, 轴, ) E H M 红
原因
请与 MAZAK 技术服务中心或技术中心联系。
处理
平常mazak机床报警疑难解决方法

中的位1
点亮
• 关机断电重启
• 夹爪要夹紧状态
• 按维修小扳手按键,夹爪内夹外夹,选择卡盘 外夹,显示灯闪烁
• 脚踏开关把夹爪再松开,再加紧,显示灯常亮, 切换成功
• 把PLC差数RB1ቤተ መጻሕፍቲ ባይዱ
中的位1
点灭,恢复之前状态
反衬,
• 关机断电重启,OK
224 卡盘传感器失灵,检测步骤
这个为检查主轴卡 盘内夹和外夹状态
Smart机找不到K参数
• 画面打到位置画面 • 双击右下翻页 • 再找到参数-机械参数,里面就显示了 • 因为smart机需要软解锁才可以看到K参数
113 超程 ( +X, -Y )
• 因为维修刀塔的时候,拆卸X轴 伺服联轴器刀塔下滑,装好联轴 器后原点回位,编码器和光尺数 据差别过大,造成超程
LGMAZAK机床报警号以及处理 办法
2016年12月开始 James Wang
报警号8 电池故障(请更换)
• 显示器后面的电池需要更换
报警号12 绝对位置警告
• 更换放大器电池
报警号9 绝对位置异常
刀塔回原点
报警号82 主轴警告
主轴放大器 的风扇坏掉 了,需要更
换
选择夹爪内夹外夹步骤
• 把PLC差数RB1
• 把M18的位7改成0,关机重启, 手轮摇动X轴,每次只能向上走 10mm,然后就会报警超程,再 重启,再重复,反复操作
• 直到X轴到达后面接近开关位置 • 原点设置完成 • 再把M18位7改回来,关机重启
• 更换电池和编码器依 然报警
• 关电重启,原点复位 后问题解决
212 刀库驱动器异常(加工中心)
• 更换伺服驱动器电池
MAZAK_刀塔刀库伺服报警处理
q1 ##
位0:伺服报警
位1:绝对位置丢失
位2:主紧急停止高电平(high-order)输入
位3:主紧急停止(low-order)输入
位4:外部紧急停止 位5: 位6:PLC紧急停止 位7:其它原因
与操作相关的报警 M01 0001 n0 01 M01 0003 n0 03 M01 0004 n0 04 M01 0005 n0 05 M01 0007 n0 07 M01 0024 n0 24 M01 0025 n0 25 M01 0101 n1 01
返回参考点未完成。不 对于增量系统,未返回参考点之
能启动。
前,执行自动/手动操作。
执行参考点返回操作。
设定参考点时,不能启 当设定绝对位置时,输入了启动信
动。
号。
完成绝对位置设定。
绝对位置报警。不能启 绝对位置报警期间输入了启动信号 设定绝对位置,然后固定
动。
。
绝对位置坐标
M01 0164 n1 64 M01 0165 n1 65
参考点不能执行。 点
定绝对位置坐标
无运行模式 进给速度0
未指定运行模式,或轴运动期间更 改了运行模式
正确指定运行模式
运行参数的进给速度设定为0。
运行参数进给速度设定为0。或, 将进给速度或倍率设定为0
倍率有效,倍率为0。
以外的数值。
位置编号设定错误。不 能启动。
位置编号超过分度机构指定编号。
正确指定位置编号。
接通主电源
接触器故障
系统报警内容及对策
Z70 0001
零点设定未完成
Z70
0002 20
02
绝对位置数据丢 失
Z70
0003 20
伺服常见报警处理

---------------------------------------------------------------最新资料推荐------------------------------------------------------伺服常见报警处理常见报警处理方法 27 号报警(编码器 U、 V、 W 信号错误报警)发生原因:检测出的编码器 U、 V、 W 信号无效,同时为 0 或同时为 1 。
处理办法:1 . 查看编码器线是否固定牢固。
编码器线与电机连接处或 CN3 端口处连接是否松弛。
如有松弛将其固定牢固,重新上电就可消除 27 号报警。
2. 查看编码器信号是否连接正确,检查编码器各个信号是否连接到对应的端口上。
如发现有信号接错,则需重新接编码器线。
待接好后重新上电就可消除 27 号报警。
3. 查看编码器状态 dp20,看数码管三段是否会出现同时亮,如有出现同时亮的情况,则说明电机编码器有问题,更换电机。
4. 如上面方法都不能消除 27 号报警,则更换编码器线再试,如还不行,则有可能是伺服驱动器出现问题。
先更换伺服驱动器后再试,看是否可以消除 27 号报警。
30 号报警(电机失速报警)发生原因:定子速度长时间跟不上设定转速。
处理方法:1 . 检查伺服电机动力线 U、 V、 W 相序是否连接正确,是1 / 11否把电机动力线端子 U 相错误的连接到驱动器V 相端子上了,如U、 V、 W 相序接错,再运行时则会出现 30 号报警。
2. 检查电机负载机械部分是否卡死。
3. 检查驱动器各个连接端口是否连接正确。
查看驱动器端子 L1 、 L2、 R、 S、 T、 U、 V、 W 是否连接到对应的端口上。
4. 查看电机实际负载是否超过电机额定负载。
5. 把电机动力线线从驱动器取下,用万用表测 U-V、 V-W、U-W 两两之间阻抗,若阻值范围 5 欧以内, 且三组数据大概相等,则说明电机绕组没问题(若阻值异常,则电机绕组可能有问题)。
伺服驱动器报警处理

报警号:A2—绝对值编码器电池异常
一. 可能的原因 绝对值编码器使用前必须先对 绝对值编码器清零。R系列马达使用绝对值编码器 二. 解决方法
要使用其他管脚进行清零时,请改变 Gr 9.03 的设定值。 注意点:伺服第一次上电后使用一次后,在以后的使用过程中必须保证此管脚不工作。 否则伺服的原点会发生改变。 方法2. 不想专门配线来进行清零时: 上电后将参数Gr 9.03 的值设定为 [ 01 ]一次,然后改回默认参数 [ 06 ] 操作顺序: ①按MODE键数次,直至显示[ Gr 0.00 ] ②按动 上/下及移动键改变显示为[ Gr 9.03 ] ③ 长按 WR键后松开,显示当前的设定内容 ④按动 上/下及移动键,更改内容,更改为 [ 01] ⑤ 长按 WR键后松开,设定内容闪动3次后停止闪动 ⑥ 重复①~ ⑤步骤,在步骤④时将设定内容恢复为 [ 06 ] 电源OFF-ON一次后OK
由于电容,电动机(电感)等原件的存在,投入电源的瞬间电路中通过很 高的电流,有时高达平常时的100倍,它可能造成开关的烧损,保险 丝溶断,电气部品损坏等,必须加以限制。 限流电阻的作用是限制投入电源瞬间的电流。 频繁地开,关电源,造成限流电阻一直工作,持续流过高电流而烧坏. 电源的ON-OFF次数不能超过 5次/小时。 次数不能超过 次 小时 小时。 电源的
报警号:62—主回路电压不足
一. 可能的原因 限流电阻(RRS)断路 DL1-DL2之间的短路片未接或松动
(PY驱动器:9号报警)
电源进线与其他大功率设备(空压机等)连接在一起,电源总线较细。大功率 设备起动瞬间,电压过低。 二. 现象 绝大多数62报警的驱动器,进行检修后发现限流电阻被烧坏 三. 解决方法 请送往山洋修理中心进行维修。 四. 说明
LGMAZAK伺服刀塔原点丢失故障处理方法

1 LGMAZAK 伺服刀塔的工作过程LGMAZAK 生产的QT200系列数控车床,其刀塔采用绝对值编码器进行位置反馈的半闭环伺服控制系统,用3.6V 锂电池记忆刀塔位置数据。
数控车床刀台采用伺服分度、牙盘定位的结构。
刀塔的工作过程是:刀塔在不旋转时,由液压缸锁定在刀塔体上, 此时分度盘相互啮合,刀具得以正确分度和定位。
一旦收到数控系统发出的换刀指令,分度盘解除啮合,刀盘松开,在伺服电机带 动下旋转,编码器确认刀盘到达指定刀具位置后。
电机停止旋转,刀盘再度被锁紧。
2刀塔故障现象MR — J2—]OOCT 内置了各种自诊断功能,如果自诊断功能检测到故障。
指示灯将显示报警分类编号和报警号,其显示顺序如 图2所示。
当出现第一组报警显示 S1 — 25时,说明发生绝对位置丢失,需要回原点。
此时在显示器上可以看到下列两种现象:① 如果执行换刀动作,机床出现 272号报警,刀盘分度超时;②仔细观察显示器上的刀具资料,LGMAZAK 在显示器上有关于刀具号码的显示,出报警刀具号码为 0,而且只有这一个刀号。
SB2报■显示煎序3刀塔故障产生的原因3.1后备电池失效和所有的伺服驱动系统一样,伺服参数需要后备电池来保存,一旦电池电压降低,而没有在规定的时间内更换电池,数据就会 丢失。
3.2外界的干扰机床在加工过程中,特别是在换刀过程中,如果出现外界干扰将会导致数据丢失。
3.3突然断电如果机床在换刀过程中突然断电,再开机时就会发现没有刀号,也就是数据丢失。
3.4误操作LGMAZAK 数控车刀塔采用的伺服单元为 MR — J2 — 100CT ,该伺服单元正常启动时,伺服单元上的匚⑷显示何凰放尢器电糠接it丽I M 电潦 接通LED 显示如图1所示。
"开四丘常运持(爾料。
OFF) 显示聃号(Iffil)ON)显示轴号(IM)__ ——j^or sS 1伺膨卑元正?»启功时的LEDE 示报瞥賊生 擢書分类 报聲号 报整分类 报警号nU 1循环显吞第一组报着显示第二组报•妃示LGMAZAK数控车床是基于WINDOWS系统下开发的,所有的刀具资料也就是WINDOWS下的一个文件,如果操作者误操作删除了刀具资料,也会导致数据丢失。
伺服器报警代码

第10章维护、检查10.1 异常诊断与处理措施 - - - - - - - - - - - - - - - - - - - - - -10-210.1.1 面板操作器的状态显示- - - - - - - - - - - - - - - - - - - - - - - - - - 10-210.1.2 警报显示一览- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 10-310.1.3 警告显示一览- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 10-610.1.4 警报/警告显示的原因与处理措施- - - - - - - - - - - - - - - - - - - - - 10-710.1.5 其他不良状况的原因与处理措施- - - - - - - - - - - - - - - - - - - - - -10-1910.2 伺服驱动的维护与检修 - - - - - - - - - - - - - - - - - - - - 10-2210.2.1 伺服电机的检修- - - - - - - - - - - - - - - - - - - - - - - - - - - - -10-2210.2.2 伺服单元的检修- - - - - - - - - - - - - - - - - - - - - - - - - - - - -10-2210.2.3 伺服单元内部部件更换的大致标准- - - - - - - - - - - - - - - - - - - - -10-2210第10章 维护、检查10.1.1 面板操作器的状态显示10.1 异常诊断与处理措施10.1.1 面板操作器的状态显示(1)位数据的显示内容(2)警报、警告的显示在SERVOPACK(伺服单元)前面的面板显示器中,一个字一个字的显示警报、警告的编码,如下所示。
马扎克MAZAK说明书维修保养培训-VCN

2021/7/20
18
2.刀库与机械手
刀库气路图
2021/7/20
19
2.刀库与机械手
VCN与VTC刀库机械原点
刀库机械原点由装配调整完成,通过治具确认。 可能出现的问题:无
2021/7/20
20
2.刀库与机械手
刀库电气原点设定
刀库通过伺服电机(HC-SF52BK-S2)驱动旋转,编码器反馈到位,刀库电气原点通过MR-J2设定。 MAGAZINE SERVO MOTOR刀库伺服电机:562002401811 可能出现问题:
可能出现问题:
1.弹簧疲劳损坏,大拇指动作不良。 2.机械手卡在刀柄中无法取出,利用其结构特点将大拇指松开。 3.如果主轴锁紧传感器[SQ11]不亮,[机械手0度]则点不亮;如果 [机械手0度]点不亮,则Y、Z轴不能移动。
2021/7/20
23
2.刀库与机械手
VCN与VTC机械手机械原点与电气原点
维修保级培训
加工中心 单击此Байду номын сангаас编辑母版副标题样式
营业部售后服务科
1.主轴
主轴外部组件
2021/7/20
2
1.主轴
主轴内部结构图
2021/7/20
3
1.主轴
主 轴 拉 刀 机 构 与 弹 刀 量 调 整
2021/7/20
主轴 卡紧/ 松开 确认 传感 器
主轴 卡紧/ 松开 油缸 及油 管进 口
4
1.刀库门开闭速度过快或过慢,开闭声音过大,通过调整气缸进气量和缓冲来克服。 2.刀库开闭确认信号不到位,检测并调整气缸上安装的传感器。
2021/7/20
22
2.刀库与机械手
VCN与VTC机械手结构完全相同(标注配置:MAS BT40;选项配置:ISO CAT40)
MAZAK 刀塔刀库伺服报警

刀塔/刀库伺服报警中级培训〔3〕以下报警说明伺服控制回路发生错误PC 显示LED 显示名称详细原因措施S01 0011S1 11PCB 错误1放大器内的PCB 发生错误伺服放大器内部元件损坏〔检查方法〕即使将所有的接头都断开,接通电源,仍然发生报警AL11.更换伺服放大器S01 0013S1 13软件处理超时,时钟错误放大器内的时钟发生错误更换伺服放大器电机型号错误所连接的电机不能被驱动使用正确的电机和放大器编码器初始通讯错误编码器电缆未连接好正确连接编码器故障更换电机编码器电缆故障(破裂或短路)更换或修理电缆编码器CPU 错误编码器故障更换电机(编码器)S01 0017S1 17PCB 错误(A/D 转换初始化错误)伺服放大器中的A/D 转换器发生错误伺服放大器内部元件故障〔检查方法〕即使将所有的接头都断开,接通电源,仍然发生报警AL10.更换伺服放大器编码器的电容电压下降。
(设定期间或驱动器与编码器之间电缆断开超过1小时或更长时)报警发生时,接通电源2到3分钟,断电再次接通电源。
电池电压低更换电池,再次设定绝对位置S01 0034S1 34CRC 错误与NC 的通讯发生错误由于噪音等因素的影响,通讯数据发生错误采取措施防噪电缆(SH21)未连接好正确连接关断NC 电源接通NC 电源放大器或NC 故障更换放大器或NCS01 0037S1 37参数错误参数设定值错误未集成的外部再生电阻被参数#002指定正确设定参数S01 0038S1 38数据序列(Frame )错误与NC 的通讯发生错误由于噪音等因素的影响,通讯数据发生错误采取措施防噪S01 0039S1 39INFO 错误NC 传输了未被定义的数据所安装的NC 不匹配更改NC 软件的版本S02 0011S2 11PCB 错误1(驱动回路错误)放大器内的PCB 发生错误伺服放大器内部元件损坏〔检查方法〕即使将所有的接头都断开,接通电源,仍然发生报警AL11.更换伺服放大器S02 0013S2 13软件处理超时,时钟错误放大器内的时钟发生错误更换伺服放大器S02 0015S2 15EEROM 错误伺服放大器中的EEROM发生写入错误EEROM 故障更换伺服放大器S02 0017S2 17PCB 错误(A/D 转换错误)伺服放大器中的A/D 转换器发生错误伺服放大器内部元件故障〔检查方法〕即使将所有的接头都断开,接通电源,仍然发生报警AL17.更换伺服放大器绝对位置丢失编码器内部绝对位置数据发生错误S01 0025S1 25S01 0016S1 16电机型号、编码器型号错误与NC 的通讯被中断通讯超时,NC 断电(down )S01 0036S1 36S02 0018S2 18PCB 错误(LSI 错误)伺服放大器中的LSI 发生错误伺服放大器内部元件故障〔检查方法〕即使将所有的接头都断开,接通电源,仍然发生报警AL18.更换伺服放大器编码器连接问题正确连接编码器电缆问题(破损或短路)更换或维修电缆S02 0024S2 24接地问题电源接通时,检测到接地输出错误输出电缆或电机的接地有问题正确接地。
伺服故障报警及处理方法
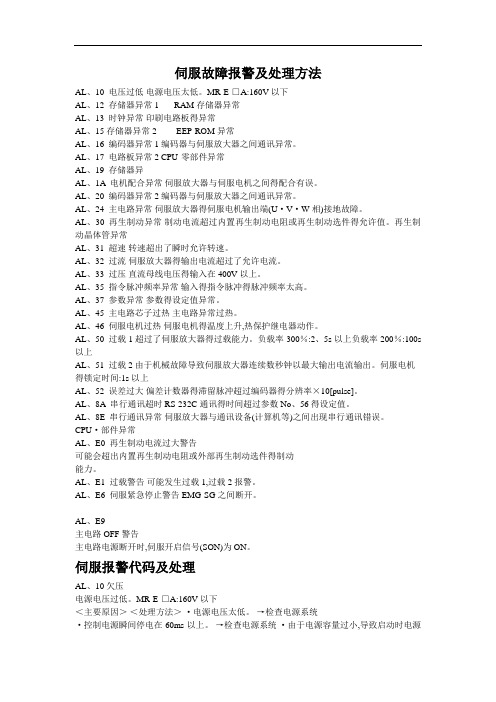
伺服故障报警及处理方法AL、10 电压过低电源电压太低。
MR-E-□A:160V 以下AL、12 存储器异常1 RAM存储器异常AL、13 时钟异常印刷电路板得异常AL、15 存储器异常2 EEP-ROM异常AL、16 编码器异常1 编码器与伺服放大器之间通讯异常。
AL、17 电路板异常2 CPU·零部件异常AL、19 存储器异AL、1A 电机配合异常伺服放大器与伺服电机之间得配合有误。
AL、20 编码器异常2 编码器与伺服放大器之间通讯异常。
AL、24 主电路异常伺服放大器得伺服电机输出端(U·V·W相)接地故障。
AL、30 再生制动异常制动电流超过内置再生制动电阻或再生制动选件得允许值。
再生制动晶体管异常AL、31 超速转速超出了瞬时允许转速。
AL、32 过流伺服放大器得输出电流超过了允许电流。
AL、33 过压直流母线电压得输入在400V以上。
AL、35 指令脉冲频率异常输入得指令脉冲得脉冲频率太高。
AL、37 参数异常参数得设定值异常。
AL、45 主电路芯子过热主电路异常过热。
AL、46 伺服电机过热伺服电机得温度上升,热保护继电器动作。
AL、50 过载1 超过了伺服放大器得过载能力。
负载率300%:2、5s以上负载率200%:100s 以上AL、51 过载2 由于机械故障导致伺服放大器连续数秒钟以最大输出电流输出。
伺服电机得锁定时间:1s以上AL、52 误差过大偏差计数器得滞留脉冲超过编码器得分辨率×10[pulse]。
AL、8A 串行通讯超时 RS-232C通讯得时间超过参数No、56得设定值。
AL、8E 串行通讯异常伺服放大器与通讯设备(计算机等)之间出现串行通讯错误。
CPU·部件异常AL、E0 再生制动电流过大警告可能会超出内置再生制动电阻或外部再生制动选件得制动能力。
AL、E1 过载警告可能发生过载1,过载2报警。
AL、E6 伺服紧急停止警告 EMG-SG之间断开。
小巨人_马扎克_伺服报警说明

伺服放大器内部元件故障 〔检查方法〕 更换伺服放大器 即使当所有的接头都断开,并接通电 源,发生报警AL18. 编码器连接问题 编码器电缆问题(破损或短路) 输出电缆或电机的接地有问题 正确连接 更换或维修电缆 正确接地。更换电缆或电机
电源电压低 瞬间电源故障达到15ms或更长时间 电源容量不足,机床启动时,引起电 检查电源 压下降 电源断开后立即接通电源 伺服放大器内部元件故障 〔检查方法〕 更换伺服放大器 即使当所有的接头都断开,并接通电 源,发生报警AL10. #002参数设定错误 设定正确
对应增量系统,未返回参考点之前, 执行参考点返回操作。 执行自动/手动操作。 当初始化绝对位置时,输入了启动信 完成绝对位置参考点初始化 号。 初始化绝对位置参考点,然后固 绝对位置报警期间输入了启动信号。 定绝对位置坐标 转换到手动运行模式之前,关闭 自由定位期间,启动了手动运行模式。 自由定位模式。 uneven分度期间,指定的station编 检查指定的station编号和分度 号超过分度数或9。 station的#100编号。
S3 52 超差错误
位置偏差超过偏差设定容许值
S52 0092
S 92 电池电压低
绝对位置编码器电池电压低
S52 00E0 S52 00E1 S52 00E3 S52 00E9
S E0 S E1
过度再生警告 过载警告
再生电源超过内部再生电阻或 外部再生选项的容许范围。 可能发生过载报警1 编码器内部数据发生错误
伺服放大器内部元件故障 〔检查方法〕 更换伺服放大器 即使当所有的接头都断开,并接通电 源,发生报警AL10. 编码器的电熔电压下降。(设定期间 报警发生时,接通电源2到3分 或驱动器与编码器之间电缆断开超过 钟,再次接通电源。 1小时或更长) 电池电压低 更换电池,再次初始化绝对位置
数控机床马扎克系统_关于Smooth系统的报警特点及案例分析说明

XSDI-11 (B1)
XSDI-11 (A1-X0)
XSDI-11 (B2-2L+)
XSDI-11 (A2)
XSDI-12 (B1)
XSDI-12 (A1-X1)
XSDI-12 (B1-2L+)
XSDI-3 (A1-X2)
XSDI-13 (B2-2L+)
XSD0-2(B1) XSD0-2(B2) XSD0-2(B3) XSD0-2(B4) XSD0-2(A1) XSD0-2(A2) XSD0-2(A3) XSD0-2(A4)
XSD0-1(B1) XSD0-1(B2) XSD0-1(B3) XSD0-1(B4) XSD0-1(A1) XSD0-1(A2) XSD0-1(A3) XSD0-1(A4)
XSDI-13 (A2)
XSDI-14 (B1)
XSDI-14 (A1-X3)
XSDI-14 (B2-2L+)
XSDI-14 (A2)
XSDI-15 (B1)
XSDI-15 (A1-X4)
XSDI-15 (B2-2L+)
XSDI-15 (A2)
2:安全继电器图解②-XSDI插头解读
插针名称(针脚) 信号点
数控机床马扎克系统
关于Smooth系统的报警特点 及案例分析说明
QYBZPL
目录:
1:关于机床报警时报警伺服轴号码的分析判断说明 2:关于安全继电器(AP0)的说明与图解分析 3:关于1005智能安全检测报警的处理案例 4:关于1001/1003部分报警的处理方法 5:关于智能安全报警的异常处理资料 6:关于出现紧急停止报警的处理案例
1:机床伺服轴号码的判断-对比轴号
以下&00BB常用报警轴编号对照表。(1代表该轴有报警,同时有多个1的代表多个轴有报警)
马扎克6800伺服报警

报警编号12:寄存器错误
意义:驱动单元寄存IC(SRAM或FLROM)错误
报警检查阶段:f1,f2
检查项目
检查结果
1 是否重复发生
经常发生 定期发生
检查驱动单元的安装环境 2 (例:环境温度,噪音,接
地)
无异常原因 环境因素异常
处理方法
更换驱动单元
进行2步
更换驱动单元 根据产生原因采取措施 例:高温……检查冷却风扇
检查项目
检查结果
1 是否重复发生
经常发生 定期发生
无异常原因
2
检查驱动单元安装环境 (例:
环境温度,噪音,接地)
环境因素异常
处理方法
更换驱动单元
进行2步
更换驱动单元
根据产生原因采取措施 例:高温……检查冷却风扇
未接地……接地
报警编号18:初始通讯错误
报警检查阶段:f2
意义:对于电机侧使用了高速串口编码器的系统,与编码器的初始通讯不执行
经常发生 定期发生
无异常原因
3
检查驱动单元安装环境 (例:
环境温度,噪音,接地)
环境因素异常
处理方法
更换为原版本的驱动单元
进行2步
更换驱动单元
进行3步
更换驱动单元 根据产生原因采取措施 例:高温……检查冷却风扇
未接地……接地
报警编号17:AD转换器错误
报警检查阶段:f2
意义:驱动单元AD转化时出现错误
未接地……接地
报警编号13:软件处理错误
报警检查阶段:f2,f3,f4
意义:驱动单元数据处理在规定时间内未完成或输入非法的IT
检查项目
检查结果
改过 1 检查伺服软件版本是否更改过
MAZAK 电源伺服报警

电源伺服报警中级培训〔2〕报警编号:与电源模块相连的伺服模块上的报警编号LED 显示:电源模块上显示的报警编号报警解除方法:AR PR NR报警编号LED 显示名称意义解除方法61l 电源模块过电流电源模块(IPM)检测到过电流PR 622频率错误输入电压频率不在设定范围之内范围:50Hz +-3%/60Hz +-3%PR 677缺相缺少一个输入相(R 、S 、T)PR 688Watch dog 电源模块软件处理在规定时间内未完成AR 699接地错误电机接地错误。
只有在READY ON 时可以检测到PR 6A A 外部接触器熔化(melt )即使是在READY OFF 状态下,外部接触器接通PR 6C C 主电路错误主电路电容充电不正常PR 6E E 寄存器错误寄存器回路检测到错误AR 6F F AD 转换器错误电源故障检测到AD 转换器错误或电源故障AR 71H 突然停止外部紧急停止即使是在READY ON 状态下,外部接触器断开瞬间断电达55ms 或更长NR 73J 超过再生能力超过电源的再生能力PR 75L 过电压L+和L -之间的电压超过410VNR 76N 外部紧急停止设定错误旋转开关设定和参数(PTYP)设定不匹配AR 77n电源模块过热电源模块(IPM)过热AR警告Warning警告编号LED 显示名称意义E9p 瞬间停止警告瞬间断电达到25ms 或更长,(主电路电压未下降,报警还未发生)EA q 外部紧急停止输入外部紧急停止输入信号被输入(CN23接头没有24V 电)EBr再生警告达到再生报警极限的80%再次接通电源模块再次接通NC 单元按下NC 复位键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PC显示
LED显 示
名称
S01 0011 S1 11 PCB错误1
详细 放大器内的PCB发生错误
S01 0013 S1 13 软件处理超时,时钟错误
放大器内的时钟发生错误
电机类型错误
编码器初始通讯错误
S01 0016 S1 16 电机类型、编码器类型错误编码Βιβλιοθήκη CPU错误S01 0017
电池电压下降。 编码器电缆破损或松动。
检查电池和编码器电缆,不需要 进行初始化零点(参考点)。
编码器绝对位置计数器发生错误 更换编码器
放大器控制回路发生错误
更换放大器
由于母线紧急停止或外部紧急停止以 紧急停止原因与##对应,检查发
外的原因产生的紧急停止
生的原因。
母线紧急停止或外部紧急停止
检查NC紧急停止和外部紧急停止
号超过分度数或9。
station的#100编号。
当初始化绝对位置时,执行返回参考 初始化绝对位置参考点,然后固
点
定绝对位置坐标
未指定运行模式,或轴运动期间更改 了运行模式
正确指定运行模式
运行参数的进给速度设定为0。
运行参数进给速度设定为0。或,倍 将进给速度或倍率设定为0以外
率有效,倍率为0。
的数值。
station编号超过分度机构指定编号 。
正确指定station编号。
使用正确的电机和放大器
编码器电缆未连接好
正确连接
编码器故障
更换电机
编码器电缆故障(破裂或短路) 更换或修理电缆
编码器故障
更换电机(编码器)
伺服放大器内部元件故障
〔检查方法〕 即使当所有的接头都断开,并接通电
更换伺服放大器
源,发生报警AL10.
编码器的电熔电压下降。(设定期间 或驱动器与编码器之间电缆断开超过 1小时或更长)
正确连接 更改自动加工时的反应特性的设 置。 更换伺服电机
增加加/减速时间常数
扭距最大值太小
增加扭距最大值
由于电压下降引起扭距过低,造成无 检查电源容量。使用大容量的电
法启动。
机。
撞机
检查运行方式
编码器故障
更换伺服电机
电机连接错误
正确连接
通讯电缆故障(破损或短路)
维修或更换电缆
电池未安装
安装电池
电池寿命
〔检查方法〕 即使当所有的接头都断开,并接通电
更换伺服放大器
源,发生报警AL18.
编码器连接问题
正确连接
编码器电缆问题(破损或短路) 更换或维修电缆
输出电缆或电机的接地有问题
正确接地。更换电缆或电机
电源电压低
瞬间电源故障达到15ms或更长时间 电源容量不足,机床启动时,引起电 检查电源 压下降
电源断开后立即接通电源
伺服放大器内部元件故障
〔检查方法〕 即使当所有的接头都断开,并接通电
更换伺服放大器
源,发生报警AL10.
#002参数设定错误
设定正确
外部再生选项未连接,或TE2电缆未 减小定位误差。将再生选项容量
连接
增大。降低负载
电源电压为260V或更高
检查电源
伺服放大器内部晶体管故障 〔检查方法〕 当外部再生选项和TE2电缆未连接 时,发生报警.
对应增量系统,未返回参考点之前, 执行自动/手动操作。
执行参考点返回操作。
当初始化绝对位置时,输入了启动信 号。
完成绝对位置参考点初始化
绝对位置报警期间输入了启动信号。
初始化绝对位置参考点,然后固 定绝对位置坐标
自由定位期间,启动了手动运行模式 转换到手动运行模式之前,关闭
。
自由定位模式。
uneven分度期间,指定的station编 检查指定的station编号和分度
报警发生时,接通电源2到3分 钟,再次接通电源。
电池电压低
更换电池,再次初始化绝对位置
由于噪音等因素的影响,通讯数据发 生错误
采取措施防噪
母线(SH21)未连接好
正确连接
关断NC电源
接通NC电源
放大器或NC故障
更换放大器或NC
外部再生电阻被参数#002指定
正确设定参数
由于噪音等因素的影响,通讯数据发 生错误
编码器内部绝对位置数据发生 错误
与NC的通讯发生错误
与NC的通讯被中断
参数设定值错误 与NC的通讯发生错误 NC传输了未被定义的数据
S02 0011 S2 11 PCB错误1
放大器内的PCB发生错误
S02 0013 S2 13 软件处理超时,时钟错误 S02 0015 S2 15 EEROM错误
S02 0017 S2 17 PCB错误1(A/D转换错误)
、W)未连接时,发生32号报警。
TE2电缆或外部再生电阻导线破损或 未连接好
正确接线
再生电阻上的晶体管故障
更换伺服放大器
内部再生电阻或外部再生选项的接线 破损
对于内部再生电阻,更换放大器 。对于外部再生选项,更换外部 再生选项。
伺服电机处于过载状态
减小电机负载。检查运行方式。
编码器内部热保护器故障
更换伺服放大器
加/减速时间常数
增加加/减速时间常数
电齿轮比例过大 编码器故障 伺服放大器的输出U、V、W相短路
检查齿轮比 更换编码器 维修电缆
运行期间,伺服放大器的输出U、V 更换伺服放大器
、W相接地故障
正确接线
由于噪音影响,过电流检测回路故障
。伺服放大器电源模块故障。
〔检查方法〕
采取防噪措施
当伺服放大器输出(端子TE1的U、V
伺服放大器或伺服过载保护功 能启动。(参见过载保护特性
中的11-1)
由于机床撞机或过载,最大输 出电流连续几秒针。
S03 0052 S3 52 超差错误
位置偏差超过偏差设定容许值
S52 0092 S 92 电池电压低
S52 00E0 S E0 过度再生警告 S52 00E1 S E1 过载警告 S52 00E3 S E3 绝对位置计数警告 S52 00E9 S E9 主电路断开警告
当执行挡块参考点时,返回参考点速 降低返回参考点速度或增加挡块
度过快或挡块长度过短。
长度
当返回参考点时,轴移动方向与指定 方向相反
按正确方向返回
轴内部连锁功能有效
取消内部连锁信号
伺服OFF功能使得内部连锁
取消伺服OFF
达到软限位
检查软限位设定和机床位置
绝对位置报警期间执行参考点返回
初始化绝对位置参考点,然后固 定绝对位置坐标
S03 0033 S3 33 过电压
伺服放大器中的转换器电压达 到400V或更高
S03 0033 S3 33 过电压 S03 0046 S3 46 电机过热 S03 0050 S3 50 过载1
S03 0051 S3 51 过载2
伺服放大器中的转换器电压达 到400V或更高
运行方式使得电机连续过载
更换编码器
伺服电机的连续输出超过额定输出。 减小电机负载。检查运行方式。 更换为输出更大的电机或放大器
。 伺服放大器的输出超过容许输出。
伺服系统不稳定,发生振荡。
更改自动加工时的反应特性的设 置。
电机连接错误
正确连接
编码器故障
更换伺服电机
机床撞机
机床运行方式
电机连接错误 伺服系统不稳定,发生振荡。 编码器故障 加/减速时间常数过小
返回参考点未完成。不能启动 。
初始化参考点。不能启动。
绝对位置报警。不能启动。
自由定位模式。不能执行手动 运行模式。 uneven分度station编号错误。 不能启动。
原因
措施
伺服放大器内部元件损坏
〔检查方法〕 即使当所有的接头都断开,并接通电
更换伺服放大器
源,发生报警AL11.
更换伺服放大器
电机不能被驱动
Z73 0001
绝对位置寄存器电池电压警告
Z73 0003
绝对位置计数器警告 88 watch dog
Q01 #### q1 紧急停止
E7 紧急停止
q1 ##
位0:伺服报警
位1:绝对位置丢失 位2:母线紧急停止high- o位r3d:er母输线入紧急停止low- order输入
位4:外部紧急停止 位5: 位6:PLC紧急停止 位7:其它原因
S1 17
PCB错误1(A/D转换初始错误)
伺服放大器中的A/D转换器发生 错误
S01 0025 S1 25
绝对位置丢失
S01 0034 S1 34 CRC错误
S01 0036 S1 36 通讯超时,NC down S01 0037 S1 37 参数错误 S01 0038 S1 38 frame错误 S01 0039 S1 39 INFO错误
更换电池并初始化编码器
达到了内部再生电阻或外部再生选项 的容许范围的85%或更多。
1.减小位置偏差。 2.将再生选项更换为更大规格。 3.降低负载。
达到过载报警1条件的85%或更高 S03 0050
1.噪音
采取防噪措施
2.编码器故障 当主电源断开时,伺服ON信号输入 。 接触器故障
更换伺服电机 接通主电源
电源接通时,检测到接地输出 错误
S03 0010 S3 10 电压不足
电源电压为160V或更低
S03 0030 S3 30 再生错误 S03 0031 S3 31 超速 S03 0032 S3 32 过电流
内部再生电阻或外部再生选项 超过再生容许值
再生晶体管错误 电机速度超过允许的瞬间速度
电流超过伺服放大器容许值
放大器内的时钟发生错误 伺服放大器中的EEROM发生写入 错误