物体系统的平衡问题
探讨静力学中物体系统平衡问题的几种类型及求解方法
未知力 , 列 平 衡 方 程 可 以全 部 求 解 出来 。 X M^ = 0 , × a — F c x 2 a - 2 F x 2 a = 0 , F c 、 , = 3 F ∑Yi = 0 , F ^ + F c - 2 F = 0 , F ^ = — . F
国瑶 誊
图6 图7 图8 图9
此 时 我 们 分 析一 下 这 个 物 体 系 统 的 受 力 图 。以B C 为研 究 对象时 , 如 图8 所示, 4 个未知力 , 列 平 衡 方 程无 法 全 部 求 出 , 但 是 我 们 注 意 到 这4 个 未 知 力 中有 3 个 未 知 力 交 于 一 点 ,如 F 、
物 体 系 统 平 衡 问 题 相 对 于 单 个 物 体 平 衡 问题 要 复 杂 一 些, 学生在求解 物体系统平衡 问题时 , 常 常会 感 觉 无 从 下 手 . 不 知 道 如 何 求 解 。对 于 物 体 系统 平 衡 问题 与单 个 物 体 平 衡 问 题 的 区别 在 于 研 究 对 象 的选 择 及 解 题 的顺 序 。研 究 对 象 可 以 是整体 . 也 可 以取 单 个 或 一个 部 分 的 物 体 系 统 . 解 题 顺 序 按 照 研 究 对 象 选 择 的 顺 序 而 定 。本 文 把 物 体 系统 平 衡 问 题 分 为 几 种类 型 , 并 为每种类 型提供 解题方 法 , 只 要 分 清 属 于 哪 种 类 型, 并 对症 下 药 , 问 题 便 会 迎 刃 而解 。 类型一 : 以 整体 为研 究 对 象 未 知 力 个 数 小 于 3 个。 如图1 所 示, 该 物 体 系统 中 , 包含3 个构件A B、 E D、 C D. 以整 体 为研 究 对 象, A处 固定 铰 链 2 个约束反力 。 B 处活 动铰链1 个 约束反力 , 总 共3 个约束 反力 , 受 力 图 如 图2 所示 , 可 以直接列3 个 平 衡 方 程 求解 。 如有 需 要 还 可 以 以个 体 为 研 究 对 象 , 约 束 反 力 小 于 等 于 3 个, 可 以列 平 衡 方 程 求 解 。
物体平衡问题的解题方法及技巧
《物体平衡问题的解题方法及技巧》课堂实录陈光旭(兴山一中湖北443700)物体平衡问题是高考考查的一个热点,在选择题、计算题甚至实验题中都有考查和应用。
如2010安徽卷第18题、2010广东卷第13题、2010山东卷第17题、2010新课标全国卷第18题等等……由于处于平衡状态的物体,它的受力和运动状态较为单一,往往为一些同学和老师所忽视。
但作为牛顿第二定律的一种特殊情况,它又涵盖了应用牛顿第二定律解决动力学问题的方法和技巧,所以解决好平衡问题是我们解决其它力学问题的一个基石。
物体的平衡是力的平衡。
受力分析就成了解决平衡问题的关键!从研究对象来看,物体的平衡可分为单体平衡和多体平衡;从物体的受力来看,又可分为静态平衡和动态平衡。
一、物体单体平衡问题示例:例一:(2010新课标全国卷18)如图一,一物块置于水平地面上,当用与水平方向成600角的力F1拉物块时,物块做匀速直线运动;当改用与水平方向成300的力F2推物块时,物块仍做匀速直线运动。
若F1和F2的大小相等,则物块和地面间的动摩擦因数为:F 2A :2-3 B.3-1 C.3/2-1/2 D.1-3/2解析:将F 1分解到水平方向和竖直方向,如图二,水平方向受力平衡: F 1COS600=Fu竖直方向:FN -F 1=mg同理,对F 2进行分解,建立方程组,解出结果为A 在解决这类问题时,我们用的方法就是将物体受到的力,分解到物体的运动方向和垂直与物体的运动方向,列出两个平衡方程,解出未知问题。
这种方法不光对平衡问题适用,对非平衡问题同样适用。
例二:如图三,光滑小球放在一带有圆槽的物体和墙壁之间,处于静止状态,现将圆槽稍稍向右移动一点,则球对墙的压力和对物体的压力如何变化?解析:这是单体的动态平衡问题 图一图二 图三对小球受力分析,如图四.由于物体处于平衡,物体所受重力、墙壁的作用力的合力与圆槽的作用力等值反向。
当圆槽稍稍向右移时,θ角变小mg 恒定,F 墙的方向不变,所以,斜槽和墙壁对物体的支持力都变小。
静力学中的平衡问题与解法

静力学中的平衡问题与解法静力学是力学中的一个分支,研究物体在静止或匀速直线运动时的力、力之间的关系以及物体的平衡条件等内容。
在静力学中,平衡问题是一个重要的研究内容。
本文将讨论静力学中的平衡问题以及常见的解法。
静力学中,平衡是指物体所受的合外力合力矩为零的状态。
平衡可以分为两种类型:平衡在点和平衡在体。
1. 平衡在点平衡在点指的是物体受力的合力通过一个点,也就是力矩为零。
这要求物体所受的合外力矢量的代数和为零,并且力矩的代数和也为零。
平衡在点的解法一般包括以下步骤:步骤一:画出物体受力的示意图,并标注出力的大小、方向。
步骤二:通过几何图形或代数方法求出合外力的代数和,判断合外力的大小和方向。
步骤三:通过几何图形或代数方法求出力矩的代数和,判断力矩的大小和方向。
步骤四:根据力矩为零的条件,确定物体的平衡条件。
如果力矩不为零,则说明物体不处于平衡状态。
平衡在点的解法中,可以利用力矩的性质,如力矩的叠加原理、力矩的向量性质等,来简化计算。
此外,还可以运用平衡条件求解未知的力或力矩。
2. 平衡在体平衡在体指的是物体受力的合外力和合力矩都为零的状态。
这要求物体所受的合外力矢量的代数和为零,并且力矩的代数和也为零。
平衡在体的解法一般包括以下步骤:步骤一:画出物体受力的示意图,并标注出力的大小、方向。
步骤二:通过几何图形或代数方法求出合外力的代数和,判断合外力的大小和方向。
步骤三:通过几何图形或代数方法求出力矩的代数和,判断力矩的大小和方向。
步骤四:根据合外力和力矩都为零的条件,确定物体的平衡条件。
如果合外力或力矩不为零,则说明物体不处于平衡状态。
平衡在体的解法中,通常需要考虑物体所受力的叠加效应。
常见的方法有力的分解、力矩的叠加等。
除了上述两种平衡问题的解法,静力学中还有一些特殊情况的解法,如斜面上物体的平衡、悬挂物体的平衡等。
对于这些特殊情况,可以利用相关的几何关系和平衡条件,采取相应的解法进行求解。
总之,静力学中的平衡问题是一个重要的内容,通过合理的求解方法可以确定物体的平衡条件。
物理人教版必修一 第三章相互作用 专题物体在力作用下的平衡问题(共60张PPT)
的相互作用的摩擦力为多大;
整体法与隔离法
• (1)第1块砖和第4块砖受到木
板的摩擦力各为多大;
整体法与隔离法
• (1)第1块砖和第4块砖受到木
板的摩擦力各为多大;
• 将4块砖看成一个整体,对整体
进行受力分析,如图所示.在 竖直方向,共受到三个力的作 用:竖直向下的重力4mg,两 个相等的竖直向上的摩擦力f, 由平衡条件可得:
衡状态。
• 平衡状态下的运动学特征: 1. 物体的速度v=0或v不变 2. 物体的加速度a=0 • 物体处于平衡状态的条件:
物体所受合力F合=0
平衡状态
判断:以下物体是否处于平衡状态? (1) 天花板下悬挂的静止的吊扇。 (2) 粗糙斜面上静止的木块。 (3) 光滑水平面上匀速直线滑动的冰块。 (4) 沿斜面匀速直线下滑的铁箱。 (5) 竖直上抛到最高点的篮球。 (6) 拿在手上铅球,松手的瞬间。
衡状态。
• 平衡状态下的运动学特征: 1. 物体的速度v=0或v不变 2. 物体的加速度a=0
平衡状态
• 物体处于静止或者匀速直线运动的状态叫做平
衡状态。
• 平衡状态下的运动学特征: 1. 物体的速度v=0或v不变 2. 物体的加速度a=0 • 物体处于平衡状态的条件:
平衡状态
• 物体处于静止或者匀速直线运动的状态叫做平
O
Fx x
力的正交分解法
• 力的正交分解:把一个已知力沿着两个互相垂
直的方向进行分解。
y F
q
• 正交分解的步骤:
• ①建立xOy直角坐标系
• ②分别向坐标轴做垂线 Fy • ③作出分力Fx、Fy
• ④利用三角函数求出Fx、O
Fy
力学中的平衡问题及解题方法

力学中的平衡问题及解题方法力学是物理学的一个重要分支,研究物体的运动和相互作用。
在力学中,平衡是一个关键概念,指的是物体在外力作用下保持静止或者匀速运动的状态。
解决平衡问题是力学学习的基础,本文将重点介绍平衡问题的概念及解题方法。
一、平衡问题概述在力学中,平衡是指物体的合力与合力矩均为零的状态。
合力指的是物体受到的所有力的矢量和,合力矩是指物体受到的所有力矩之和。
当一个物体处于平衡状态时,其合力为零,即物体受到的所有力相互抵消;合力矩也为零,即力矩的总和等于零。
通过解决平衡问题,我们可以推导出物体的受力关系及各个力的大小和方向。
二、解题方法解决平衡问题的思路和方法有很多,下面将介绍几种常用的方法。
1. 通过自由体图分析自由体图是解决平衡问题的重要工具。
通过将物体从整体中分离出来,将作用在物体上的力单独画在一张图上,即可更清晰地分析受力情况。
首先,选择心理上合适的参考点,计算该点的合力和合力矩,然后利用力的平衡条件和力矩的平衡条件,推导出物体的受力关系。
在绘制自由体图时,需要标注各个力的名称、大小和方向,以便更好地进行分析。
2. 利用转动平衡条件解题当物体可以绕某个轴进行转动时,我们可以利用转动平衡条件解题。
转动平衡条件是指物体的合力矩等于零,即物体受力矩的总和等于零。
通过将每个力的力矩与其距离乘积求和,然后令其等于零,我们可以解得物体的未知量。
在利用转动平衡条件解题时,需要注意选择正确的参考点和力臂的方向。
3. 使用迭加法解题迭加法是一种常用的解决力学问题的方法。
对于一个复杂的平衡问题,我们可以将其分解为多个简单的平衡问题来处理。
将物体逐步分解,每次只考虑其中的一部分受力情况,然后根据平衡条件解题。
最后通过迭代计算,得到物体的受力关系和未知量。
4. 运用静摩擦力解决问题在某些平衡问题中,静摩擦力起到重要的作用。
静摩擦力是指物体接触面上的摩擦力,当其超过一定程度时,可以阻止物体发生滑动。
通过利用静摩擦力的性质,我们可以解决涉及摩擦力的平衡问题。
02-物体的平衡问题

☆专题二☆【专题分析】1.本专题主要是复习物体的受力分析以及对物体的平衡问题。
2.本专题涉及到了力学、电磁学,是整个力学、电磁学的基础,属于每年高考必考内容.3.高考中常以选择题形式或把相关知识综合在计算题中进行考查.【热点探究】1.应用力的合成和分解讨论力的平衡类问题.2.结合受力分析,利用共点力的平衡条件解决实际问题的能力.3.带电体在电场中的平衡及导体棒在磁场中的平衡类问题.1.平衡状态的分析速度是描述物体运动状态的参量,速度变化了即物体的运动状态发生了变化.速度是矢量,大小和方向的变化都被认为物体的运动状态发生了变化.当物体的速度不变时,才能认为物体处于平衡状态,物体处于静止或匀速直线运动时即是如此值得注意的是静止状态是指速度和加速度都为零的状态,如竖直上抛运动物体到达最高点时速度为零,但加速度等于重力加速度,不为零,不是静止状态.2.平衡条件的推论:物体处于平衡状态时,它所受的某一个力与它所受的其余的力的合力等值反向.例如,一个质点在n 个力,的作用下处于平衡状态,如果把其中的一个力Fn 逆时针转动900,其余的力不变,这时质点所受的合力大小为n F 2。
判断一个物体是否,处于平衡状态的方法有几种?1.物体在同一平面上的三个不平行的力的作用下,处于平衡状态时,这三个力必为共点力.2.物体在三个共点力作用下处于平衡状态时,表示这三个力的有向线段组成一封闭的矢量三角形.(如图所示)问题解决平衡类问题的思想方法:1.解决平衡物体临界问题时的方法—假设法平衡物体的临界状态是指物体所处的平衡状态将要被破坏,而又未被破坏的状态,解决该类问题可用假设法分析,其解题基本步骤为:(1)明确研究对象;(2)画受力分析图;(3)假设可能发生的临界情况;(4)列出满足临界情况的平衡方程求解.2.列平衡方程:关于物体的平衡类问题列平衡方程一般分以下两种情况:(l)在某一方向上列平衡方程.该类问题一般是将受力归结到某一方向(如重力的方向,只在竖直方向列平衡方程),也可能是不研究其他方向上的力,或其他方向的力对该方向无影响.(2)在两个相互垂直的方向上列平衡方程:该类问题一般物体受力较复杂,两个相互垂直方向一般以少分解力为原则结合所研究问题确定.【例1】如图细绳系住放在倾角为θ的光滑斜面上,当细绳由水平方向逐渐向上偏移时,细绳上的拉力将()A.逐渐增大B.逐渐减小C.先增大后减小D.先减小后增大【解析】选D.用图解法分析该题,作出力的图示如图甲.因为G、F N、F T三力共点平衡,故三个力可以构成一个矢量三角形,图乙中G的大小和方向始终不变;F N的方向也不变,大小可变,F T的大小、方向都在变,在绳向上偏移的过程中,可以作出一系列矢量三角形(如图乙所示),显而易见在F T变化到与FN垂直前,F T是逐渐变小的,然后F T又逐渐变大,故应选D.同时看出斜面对小球的支持力F N是逐渐变小的.应用此方法可解决许多相关动态平衡问题.(1)利用图解法的关键是把力的矢量三角形或平行四边形作好,并根据题意条件的变化确定图的变化趋向及其变化的临界状态.(2)要熟练把握几种常见的动态变化中最大或最小的状态,如:①当已知合力F的大小、方向及一个分力F1的方向时,另一个分力F2最小的条件是:两个分力垂直,如图甲,最小的力F2 =Fsina.②当已知合力F的方向及一个分力F1的大小、方向时,另一个分力F2最小的条件是:所求分力F 2与合力F 垂直,如图乙,最小的力F 2=F 1sina.③当已知合力F 的大小及一个分力F 1的大小时,另一分力F 2最小的条件是:已知大小的分力F 1与合力F 同方向,最小的力F 2 =1F F -.如图中,物体的重量为G ,保 持物体与细绳AO 的位置不变,让细绳BO 的B 端沿四分之一圆弧从D 点向E 点慢 慢地移动.试问:在此过程中AO 中的张力 F TA 、与BO 中的张力F TB 如何变化?【例2】(2006·石家庄市一质检)有三根长度均为L 的不可伸长的绝缘轻线,其中两根线的一端固定在天花板上的O 点,另一端分别拴有质量均为m 的带电小球A 和B ,它们的电荷量分别为-q 和+q,A,B 之间用第三根线连接起来.若在该空间加一个方向水平向右的匀强电场,使轻线均拉紧且处于平衡状态,如图1-12所示.不计两带电小球间相互作用的库仑力,已知重力加速度为g .求: (1)所加匀强电场场强的最小值E 为多少?(2)保持E 不变,将O,B 之间的线烧断,由于有空气阻力,A,B 两小球最后会达到新的平衡位置,此时两轻线的拉力各为多少?【解析】(1)当所加电场的场强E 最小时,A,B 间的绳刚好拉直而无张力,小球A 受力如图所示,由共点力的平衡条件得:Fcos θ=qE ① Fsin θ=mg ② 联立解得qmg E 33=(2)烧断细线OB 后,两球重新到达新的平衡位置,设α,β分别表示细线OA,AB 与竖直方向的夹角.A 小球受力如图所示,由共点力平衡条件得:F 1sina+F 2 sin β=qE ③ F l cosa-F 2 cos β=mg ④ B 球受力如图所示,其中F 2'=F 2, 由共点力平衡条件得:F 2 sin β=qE ⑤ F 2 cos β=mg ⑥ 联立⑤、③解得sina=0,a=0 即细线OA 竖直将⑥代入④解得F 1=2mg 由⑤、⑥解得mg F 3322=(1)正确、灵活地确定研究对象是解决问题的重要前提.本题解析中,主要采用隔离法.在第(2)中若采用整体法可迅速简明地解决问题.对A,B整体,水平方向受两电场力,等大反向,矢量和为零.竖直方向受竖直向下的重力.由平衡条件知,F l与总重力一定等大反向.故a=0. F1 =2mg. (2)确定研究对象的原则:是先整体后隔离,两者交叉使用方能解决问题.竖直墙面与水平地面均光滑且绝缘,小球A,B带有同种电荷,用指向墙面的水平推力F作用于小球B,两球分别静止在竖直墙面和水平地面上,如图所示.如果将小球B向左推动少许,当两球重新达到平衡时,与原来的平衡状态相比较()A.推力F变大B.竖直墙面对小球A的弹力变大C.地面对小球B的支持力不变D.两个小球之间的距离变大【例3】同时存在匀强电场和匀强磁场的空间中取正交坐标系Oxyz(z轴正方向竖直向上),如图所示.已知电场方向沿z轴正方向,场强大小为E;磁场方向沿y轴正方向,磁感应强度的大小为B;重力加速度为g.问:一质量为m、带电荷量为+q从原点出发的质点能否在坐标轴上以速度v做匀速运动?若能,m,q,E,B,v及g应满足怎样的关系?若不能,说明理由.【解析】已知带电质点受到的电场力为qE,方向沿z轴正方向;质点受到的重力为mg,沿z轴的负方向.假设质点在x轴上做匀速运动,则它受的洛伦兹力必沿z轴正方向(当v沿x轴正方向)或沿z轴负方向(当v沿x轴负方向),要质点做匀速运动必分别有qvB+qE=mg ①或qE=qvB+mg ②假设质点在y轴上做匀速运动,即无论沿y轴正方向还是负方向,洛伦兹力都为0,要质点做匀速运动必有 qE=mg ③假设质点在z轴上做匀速运动,则它受的洛伦兹力必平行于x轴,而电场力和重力都平行于z 轴,三力的合力不可能为0,与假设矛盾,故质点不可能在z轴上做匀速运动.(1)若不考虑粒子重力,能否满足上述要求?(2)若带电粒子带-q的电荷能否满足上述要求?N BC1.如图所示,一质量为m 、电量为+q 的带电小球以与水平方向成某一角度θ的初速度v 0射入水平方向的匀强电场中,小球恰能在电场中做直线运动.若电场的场强大小不变,方向改为相反同时加一垂直纸面向外的匀强磁场,小球仍以原来的初速度 重新射入,小球恰好又能做直线运动.求电场强度的大小、磁感应强度的大小和初速度与水平方向的夹角θ。
工程力学中物体系统平衡问题求解的分析与启示
教研园地JIAO YAN YUAN DI工程力学中物体系统平衡问题求解的分析与启示罗啸峰四川职业技术学院 机械工程系 (四川省遂宁市 629000)摘 要: 在高等职业院校机械类专业工程力学课程学习中,物体系统平衡问题求解,需要建立在全盘分析基础上,确定出具体的解题方向,找出解决问题的突破口,在建立不同思考角度而完成的多种求解方法的基础上,进行比较、归纳和总结,不断挑战和完善自己。
关键词:物体系统平衡求解;通盘分析;解题方向;分析比较在高等职业院校机械类专业工程力学课程学习中,物体系统平衡问题求解是工程力学课程学习的基础,也是重点之一。
如果不能准确有效的求解出未知力,则物体的结构设计、强度计算就是空谈。
在多年的教学实践中,发现同学们对单一研究对象受力分析及求解的问题不大,但对于多个物体组成的物体系统平衡问题求解,常常就表现得比较茫然无措、无从下手。
如果去认真剖析和总结,其实仍然是有规律可循的。
1 通盘分析,找突破口针对一个物体系统平衡问题进行求解时,首先应对其进行通盘考虑,明确其中哪些杆件是二力杆[1],非二力杆的杆件,根据其受力和约束情况,准确判断出杆件受多少个力的作用,结合约束反力的规定,确定出杆件未知量的数量。
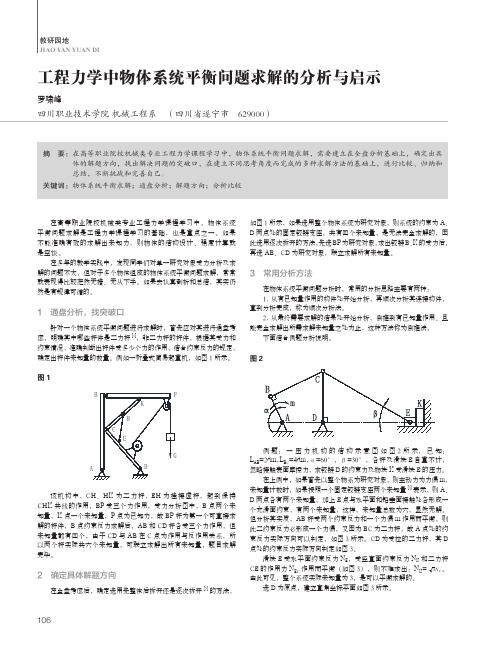
例如一折叠式简易起重机,如图1所示。
图1该机构中,CH、HK为二力杆,EH为挂接虚杆,起到保持CHK共线的作用,BP受三个力作用,受力分析图中,B点两个未知量,K点一个未知量,P点为已知力,故BP杆为第一个可直接求解的杆件,B点约束反力求解后,AB和CD杆各受三个力作用,但未知量都有四个,由于CD与AB在C点为作用与反作用关系,所以两个杆实际共六个未知量,可联立求解出所有未知量,题目求解完毕。
2 确定具体解题方向在全盘考虑后,确定选用先整体后拆开还是逐次拆开[2]的方法,如图1所示,如果选用整个物体系统为研究对象,则系统的约束为A、D两点处的固定铰链支座,共有四个未知量,是无法完全求解的,因此选用逐次拆开的方法,先选BP为研究对象,求出铰链B、K的受力后,再选AB、CD为研究对象,联立求解所有未知量。
2-3.4 平面一般力系(物体系统的平衡)
2
2
1 q
3
FCx
C
FCy
D
FD
F y 0 : F A y FB FD F 4 q 0
M A (F ) 0 : 8 FD 4 FB 2 F 4 q 6 0
F A
FAx FAy
q
B
FB
解得
FB 1 F 3 q 2 FAy 1 F 1q 2 2
F
0
F Ax
3、再研究整体
2、研究BC杆,画受力图
FBy
B
F
60
0
FC
C
Fy 0 0
F Ay
M
FBx
B
a
0
M
FC
A
M
A
二、平面平行力系的平衡方程
Fx 0
0 0 0 0
Fx 0
F1 cos F2 cos F3 cos 0 F1 sin F2 sin F3 sin 0
4×3+XA+XB = 0
P =20kN, q = 4kN/m
P
1m
XB
B
XA = - 5.67 kN
YB
例2、组合梁ABC的支承与受力情况如图所示.已 知 P = 30kN, Q = 20kN, = 45o.求支座A和C的约
束反力.
P
A B
Q
C
2m
2m
2m
2m
P = 30kN, Q = 20kN, = 45o
0
F Ay ql / 3
FOy = ql / 6
[例]已知:图示梁,求:A、B、C处约束力。
平面一般力系—物体系统的平衡问题(建筑力学)
平面一般力系
例4-7 组合梁受荷载如图所示。已知q=4kN/m,FP=20kN ,梁自重不计。求支座A、C的反力。
解 整个梁、BC段和AB段的受力图如图示。
平面一般力系
(1)先取BC ,列平衡方程
∑MB (F ) = 0
FCy×2-FP×1=0
FCy
20 1 2
Байду номын сангаас
kN
10kN
()
(2)再取整体 ,列平衡方程
平面一般力系
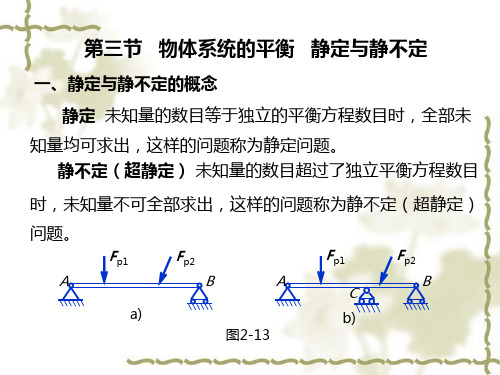
作用在物体上的未知力的数目正好等于独立平衡方程的 数目,因此,应用平衡方程,可以解出全部未知量。这类问 题称为静定问题,相应的结构称为静定结构。
在工程实际中,有时为了提高结构的承载能力,或为了 满足其他工程要求,常常需要在静定结构上增加一些构件或 约束,从而使作用在结构上未知力的数目多于独立平衡方程 的数目,未知量不能通过平衡方程全部求出,这类问题称为 静不定(或超静定) 问题,相应的结构称为静不定结构(或 超静定结构)。
本题也可以先取梁BC,再取AB。这就需要求出FBx和FBy
,比较麻烦。
平面一般力系
解决物体系统平衡问题的关键在于 (1)恰当地选取研究对象。这就要求我们根据所求,选
择能建立已知量和不多于三个未知量的物体,并正确地画出 受力图。 这是解决“能解不能解”的问题。
(2)合理地列出平衡方程,以避免解联立方程。通常情 况下。力矩方程的矩心应先在多个未知量的交点上,投影方 程的投影轴应尽量与多个未知量垂直或平行。这又是解决“ 好解不好解”的问题。
∑Fy= 0 FAy + FCy - FP -q× 3 = 0
FAy= 22kN (↑)
∑Fx= 0
FAx= 0
平面一般力系
物体系统的平衡问题

AB杆:解:1。取研究对象画受力图。
2.建立平衡方程式
∑FX = 0 : ∑Fy = 0 :
FAX 0
FAY 36 FBY FD 0
∑MA = 0 :
363 8FBY 6FD 0
3.解平衡方程
注意作用与反作用关系 所以:
FAX 0 FD 17KN
建筑力学
物体系统的平衡问题 以上讨论的都是单个物体的平衡问题。对
于物体系统的平衡问题,其要点在于如何正确 选择研究对象,一旦确定了研究对象,则计算 步骤与单个物体的计算步骤完全一样。下面举 例讲解如何正确选择研究对象的问题。
例 4 求图示结构的支座反力。 解: 一个研究对象最
多有三个平衡条件, 因此研究对象上最多 只能有三个未知力。
取右半部分为研究对象,画受力图: 由 ∑MC = 0 :
4 4 2 4FBX 4FBY 0 4 4 2 4FBX 417 0
FBX 9KN 将FBX 代入式:
FAX 20 FBX 0
FAX FBX 20 11KN
建筑力学
FAY 7KN
例 5 求图示三铰拱的支座反力。 解: 取整体为研究对象,
画受力图:
∑MA = 0 :
20 2 4 46 8FBY 0
∑MB = 0 :
20 2 4 4 2 8FAY 0
∑FX = 0 : FAX 20 FBX 0
FBY 17KN
FAy 1KN
FAX 20 FBX
注意到BC杆有三个未 知力,而AB 杆未知力
超过三个,所以应先
取BC 杆为计算对象, 然后再取AB 杆为:1。取研究对象画受力图 2.建立平衡方程式 ∑FX = 0 : FBX 0 ∑y = 0 : FBY 12 FC 0 ∑MB = 0 : 12 2 4FC 0 3.解平衡方程
工程力学 同济 2版 第三章静力学专题
[例7] 由不计自重的三根直杆组成的A字形支架置于光滑地面 上,如图 a) 所示,杆长AC=BC=L=3 m,AD=BE=L/5,支架 上有作用力F1=0.8 kN,F2=0.4 kN,求横杆DE的拉力及铰C和A 、B处的反力。
(a)
(b)
(c)
23
解 A字形支架由三根直杆组成,要求横杆DE的拉力和铰C的 反力,必须分开研究,又DE为二力杆,所以可分别研究AC和BC 两部分,但这两部分上A、B、C、D、E处都有约束反力,且未 知量的数目都多于3个。用各自的平衡方程都不能直接求得未知 量。如果选整个系统为研究对象,则可一次求出系统的外约束 反力。 (1) 先取整体为研究对象,在其上作用有主动力Fl和F2,A、 B处均为光滑面约束,而A处是两个方向上受到约束,因而约束 反力有FAx,FAy和FB,并选取坐标轴如图 b) 所示。列出平衡方 程
目
录
§3-1 物体系统的平衡问题
§3-2 特殊构架—平面桁架
2
§3-1 物体系统的平衡问题
一、静定与超静定的概念 我们学过: ∑X = 0
平面汇交力系
力偶系 平面 任意力系
Y ∑ =0
两个独立方程,只能求两个独立未知数。
一个独立方程,只能求一个独立未知数。 三个独立方程,只能求三个独立未知数。
m ∑
i
=0
X ∑ =0 Y ∑ =0
m ∑
O
( Fi ) = 0
当:独立方程数目≥未知数数目时,是静定问题(可求解) 独立方程数目<未知数数目时,是静不定问题(超静定问题)
3
[例 ]
静定(未知数三个)
静不定(未知数四个)
静不定问题在强度力学(材力,结力,弹力)中用位移协 调条件来求解。
高一物理竞赛讲义八——平衡的种类

一般物体的平衡问题物体的平衡又分为随遇平衡、稳定平衡和不稳定平衡三种.一、稳定平衡:如果在物体离开平衡位置时发生的合力或合力矩使物体返回平衡位置,这样的平衡叫做稳定平衡.如图1—1a中位于光滑碗底的小球的平衡状态就是稳定的.二、不稳定平衡:如果在物体离开平衡位置时发生的合力或合力矩能使这种偏离继续增大,这样的平衡叫做不稳定平衡,如图1—1b中位于光滑的球形顶端的小球,其平衡状态就是不稳定平衡.三、随遇平衡:如果在物体离开平衡位置时,它所受的力或力矩不发生变化,它在新的位置上仍处于平衡,这样的平衡叫做随遇平衡,如图1—1c中位于光滑水平板上的小球的平衡状态就是随遇的.从能量方面来分析:物体系统偏离平衡位置,势能增加者,为稳定平衡;物体系统偏离平衡位置,减少者为不稳定平衡;物体系统偏离平衡位置,不变者,为随遇平衡.如果物体所受的力是重力,则稳定平衡状态对应重力势能的极小值,亦即物体的重心有最低的位置.不稳定平衡状态对应重力势能的极大值,亦即物体的重心有最高的位置.随遇平衡状态对应于重力势能为常值,亦即物体的重心高度不变.类型一、物体平衡种类的问题一般有两种方法解题,一是根据平衡的条件从物体受力或力矩的特征来解题,二是根据物体发生偏离平衡位置后的能量变化来解题;例1.有一玩具跷板,如图1—2所示,试讨论它的稳定性不考虑杆的质量.分析和解:假定物体偏离平衡位置少许,看其势能变化是处理此类问题的主要手段之一,本题要讨论其稳定性,可假设系统发生偏离平衡位置一个θ角,则:在平衡位置,系统的重力势能为(0)2(cos)E L l mgα=-当系统偏离平衡位置θ角时,如图1一3所示,此时系统的重力势能为()[cos cos()][cos cos()]E mg L l mg L lθθαθθαθ=-++--2cos(cos)mg L lθθ=-()(0)2(cos1)(cos)PE E E mg L lθθ∆=-=--故只有当cosL lθ<时,才是稳定平衡.例2.如图1—4所示,均匀杆长为a,一端靠在光滑竖直墙上,另一端靠在光滑的固定曲面上,且均处于Oxy 平面内.如果要使杆子在该平面内为随遇平衡,试求该曲面在Oxy 平面内的曲线方程.分析和解:本题也是一道物体平衡种类的问题,解此题显然也是要从能量的角度来考虑问题,即要使杆子在该平面内为随遇平衡,须杆子发生偏离时起重力势能不变,即杆子的质心不变,y C 为常量; 又由于AB 杆竖直时12C y a =, 那么B 点的坐标为sin x a θ=111cos (1cos )222y a a a θθ=-=-消去参数得 222(2)x y a a +-=类型二、物体系的平衡问题的最基本特征就是物体间受力情况、平衡条件互相制约,情况复杂解题时一定要正确使用好整体法和隔离法,才能比较容易地处理好这类问题;例3.三个完全相同的圆柱体,如图1一6叠放在水平桌面上,将C 柱放上去之前,A 、B 两柱体之间接触而无任何挤压,假设桌面和柱体之间的摩擦因数为μ0,柱体与柱体之间的摩擦因数为μ,若系统处于平衡,μ0与μ必须满足什么条件分析和解:这是一个物体系的平衡问题,因为A 、B 、C 之间相互制约着而有单个物体在力系作用下处于平衡,所以用隔离法可以比较容易地处理此类问题;设每个圆柱的重力均为G,首先隔离C 球,受力分析如 图1一7所示,由∑Fc y =0可得1131)2N f G += ① 再隔留A 球,受力分析如图1一8所示,由∑F Ay =0得11231022N f N G +-+= ② 由∑F Ax =0得21131022f N N +-= ③ 由∑E A =0得12f R f R = ④ 由以上四式可得1122323f f -===+112N G =,232N G =而202f N μ≤,11f N μ≤0233μ-≥23μ≥-类型三、物体在力系作用下的平衡问题中常常有摩擦力,而摩擦力F f 与弹力F N 的合力凡与接触面法线方向的夹角θ不能大于摩擦角,这是判断物体不发生滑动的条件.在解题中经常用到摩擦角的概念.例4.如图1一8所示,有两根不可伸长的柔软的轻绳,长度分别为1l 和2l ,它们的下端在C 点相连接并悬挂一质量为m 的重物,上端分别与质量可忽略的小圆环A 、B 相连,圆环套在圆形水平横杆上.A 、B 可在横杆上滑动,它们与横杆间的动摩擦因数分别为μ1和μ2,且12l l <;试求μ1和μ2在各种取值情况下,此系统处于静态平衡时两环之间的距离AB;分析和解:本题解题的关键是首先根据物体的平衡条件,分析小环的受力情况得出小环的平衡条件f N F F μ≤,由图1—9可知sin tan cos f T NT F F F F θμθθ≥==定义tan μϕ=,ϕ为摩擦角,在得出摩擦角的概念以后,再由平衡条件成为θϕ≤展开讨论则解此题就方便多了; 即由tan tan θϕμ≤= 情况1:BC 绳松弛的情况θ1=00,不论μ1、μ2为何值,一定平衡; 情况2:二绳均张紧的情况图1—10 A 环不滑动的条件为:11θϕ≤,即111tan tan θϕμ≤= 于是有11221cos cos tan 11θϕθμ=≥=++1111221sin sin tan 11θϕθμ=≥=++又由图1—11知1122cos cos CD l l θθ==222122122sin 1cos 1cos l l θθθ=-=-所以,若要A 端不滑动,AB 必须满足22111112222211sin 1sin 11l AB l l l θθμμ=+≤-++ ① 根据对称性,只要将上式中的下角标1、2对调,即可得出B 端不滑动时,AB 必须满足的条件为:222221222211l AB l μμ≤-++ ②如果系统平衡,①②两式必须同时满足;从①式可以看出,μ1可能取任意正值和零,当μ1=0时,AB 只能取最小值2221l l -,此时θ1=0,2l 拉直但无张力;从②式可以看出μ2的取值满足222211l l μ≥-否则AB 无解,222211l l μ=-,AB 2221l l -; 综上所述,AB 的取值范围为:情况1:2l 松弛22210AB l l ≤<-μ1、μ2为任意非负数; 情况2:2l 张紧2221l l AB -≤≤①②两式右边较小的,μ1为任意非负数,222211llμ≥-类型四、一般物体平衡条件的问题主要又分为刚体定轴转动平衡问题和没有固定转动轴的刚体转动平衡问题,这类问题要按一般物体平衡条件来处理,即要么既要考虑力的平衡,又要考虑力矩平衡来求解;要么就要考虑以哪点为转动轴或哪点先动的问题;例5.质量分别为m 和M 的两个小球用长度为l 的轻质硬杆连接,并按图1一11所示位置那样处于平衡状态.杆与棱边之间的摩擦因数为μ,小球m 与竖直墙壁之间的摩擦力可以不计.为使图示的平衡状态不被破坏,参数m 、M 、μ、l 、a 和α应满足什么条件 分析和解:本题是一道典型的刚体定轴转动平衡问题,解题时对整体进行受力分析,但物体的平衡不是共点力的平衡,处理时必须用正交分解法,同时还要考虑力矩的平衡,受力分析如图,根据力的平衡条件可列出:cos sin ()m N F M m g αα+=+ ① 1sin cos m N N F αα+= ②根据力矩平衡条件可写出:cos cos NaMgl αα=③ 杆不滑动的条件为F m < Μn;由①得 ()cos sin m M m g N F N αμα+-=<,即()(cos sin )M m g N αμα+<+④用③除④得 2(1)cos (cos sin )m lM aααμα+<+ ⑤ 杆不向右翻倒的条件为N 1>0;由①和②可得出 1cos sin m N F N αα=-()cos cos sin 0sin M m g N N αααα+-=->由此可得()cos M m g N α+> ⑥ 将③中的N 代人⑥得1cos m lM aα+> ⑦ 由于cos l a α>,再考虑不等式⑦,可得21cos 1cos (cos sin )l m la M aαααμα<<+<+ ⑧为了在不等式⑧中能同时满足最后两个不等号,就必须满足条件: cos (cos sin )1ααμα+>由此可得平衡条件为:tan μα>,如果tan μα< ,就不可能出现平衡. 例6.如图1一12,匀质杆长l ,搁在半径为R 的圆柱上,各接触面之间的摩擦因数均为μ,求平衡时杆与地面的夹角α应满足的关系.分析和解:本题也是一个一般物体的平衡问题与上题的区别在 于没有固定转动轴,所以这个问题的难点在于系统内有三个接触点,三个点上的 力都是静摩擦力,不知道哪个点最先发生移动. 我们先列出各物体的平衡方程:设杆和圆柱的 重力分别为G 1和G 2; 对杆∑F x =0 F f3+F f2cos α=F N2sin α ①∑F y =0 F N3+F N2cos α+F f2sin α=G 1 ②∑M O ´=0 12cos cos 22N l G F R αα⋅⋅=⋅⋅ ③对柱∑F x =0 F f1+F f2cos α=F N2sin α ④ ∑F y =0 F f2sin α+G 2+F N2cos α=F N1 ⑤ ∑M O =0 F f1 =F f2 ⑥ ∑M O ´=0 F N2+G 2=F N1 ⑦以上七个方程中只有六个有效,由⑦式可知,F N1>F N2,又因为 F f1 =F f2 ,所以一定是2 z 处比1处容易移动,再来比较2处和O ´处. 1如果是2处先移动,必有 F f2=μF N2, 代入④式,可得tan 2αμ=,将此结果代入①②③式,即有2132(1)(sin cos )2(1)f G L F R μμαμαμ⋅-=-+2312(1)[1(sin cos )]2(1)N l F G R μμμαμμ⋅-=-++ 在这种情况下,如要F f3≤μF N3,必须有22(1)(1)R l μμμ+≤⋅- 杆要能搁在柱上,当然要tan2R Rl αμ≥=因此在22(1)(1)tan 2RRR l l μαμμμ+≥=≤≤⋅-时,α=2arctan μ;2如果是0'处先移动,必有F f3=μF N3,代入①②式,可有22tan2f N F F α=⋅21tan2cos 2N F G l R ααμ=⋅⋅⋅⋅12cos(1tan)tan22R l ααμ=⋅+⋅ ⑧满足⑧式的α即为平衡时的α,这时要求F f2<F N2·μ,须有2211R l μμμ+>⋅- 综上所述当2211RR l μμμμ+≤≤⋅-时,α=2arctan μ; 当2211R l μμμ+>⋅-时,α应满足12cos (1tan )tan 22R l αααμ=⋅+⋅; 三、小试身手如图所示,用长为错误!R 的细直杆连结两个小球A 、B ,它们的质量分别为m 和2m ,置于光滑的、半径为R 的半球形碗内,达到平衡时,半球面的球心与B 球的连线与竖直方向间的夹角的正切为 A1 B1/2 C1/3 D1/41. 如图1—13所示,长为L 的均匀木杆AB,重量为G,系在两根长均为L 的细绳的两端,并悬挂于O 点,在A 、B 两端各挂一重量分别为G 1、G 2的两物,求杆AB 处于平衡时,绳OA 与竖直方向的夹角.1.解:以ΔOAB 整体为研究对象,并以O 为转动轴,其受力情况如图所示,设OA 与竖直线夹角为α,OC 与竖直线夹角为β,因为ΔOAB 为等边三角形,C 为AB 边的中点,所以1302AOC AOB ∠=∠=,30αβ+=,即030βα=-,03sin 602OC L L ==,03sin sin(30)2CF OC L βα==-,00cos(60)cos(30)BD L L βα=-=+,sin AE L α=,以O 为转动轴,则由刚体的平衡条件0M =∑可知12G AE G CF G BD ⋅=⋅+⋅, 即00123sin sin(30)cos(30)2G L GL G L ααα=-++ 展开后整理得:2123(2tan 432G GG G G α+=++所以,AB 处于平衡时,绳OA 与竖直方向的夹角为AB2123arctan432G G G α=++(2G +G )一足够长的斜面,最高点为O 点,有一长为l =1.00 m 、质量为m ′=0.50 kg 且质量分布均匀木条AB ,A 端在斜面上,B 端伸出斜面外.斜面与木条间的摩擦力足够大,以致木条不会在斜面上滑动.在木条A 端固定一个质量为M =2.00 kg 的重物可视为质点,B 端悬挂一个质量为m =0.50 kg 的重物.若要使木条不脱离斜面, OA 的长度需满足什么条件 画出均匀木条的受力情况图;解:设G 为木条重心,由题意可知12AG l =当木条A 端刚刚离开斜面时,受力情况如图所示.2分由①中的分析可知,若满足cos MgOA θ>cos cos mg OB mg OG θθ+6分木条就不会脱离斜面;解得:OA >0.25 m 2分长度为L 的相同的砖块平放在地面上,上面一块相对于下面一块伸出L/4,如图所示,试问,最多可以堆几块砖刚好不翻到1、图示A 、B 分别是固定墙上的两个相同的钉子,一根长2L,质量为m,质量分布均匀的细杆搁在两钉子间处于静止状态,开始时AB 间距离为2/3L,杆的上端恰好在A 点,且杆与水平方向的夹角为30°;1求A 、B 两点上受到的弹力;2如果让钉子A 不动,钉子B 以A 为圆心绕A 慢慢地逆时针转动,当转过15°时,杆刚好开始向下滑动;求杆与钉子间的滑动摩擦系数是多少3如果细杆与水平方向保持30°不变,钉子B 沿着杆方向向下改变位置,则B 移动到距A 多大距离处时,杆不再能保持平衡X=3232+L =0.928L2. 一长为L 的均匀薄板与一圆筒按图1—14所示放置,平衡时,板与地面成θ角,圆筒与薄板相接触于板的中心.板与圆筒的重量相同均为G .若板和圆筒与墙壁之间无摩擦,求地面对板下端施加的支持力和静摩擦力.画受力图 A BO GB30°A解:如图所示,圆筒所受三个力沿水平和竖直方向平衡的分量式为1sin 0N N F F θ-=,cos 0N F G θ-=板所受五个力沿水平和竖直方向平衡的分量式为2sin 0f NN F F F θ'+-= 3cos 0N NF G F θ'--= 板所受各力对圆筒和板的交点为转动轴的力矩平衡方程为23sin sin cos 0222N f N L L LF F F θθθ+-= 根据牛顿第三定律,有NN F F '= 联立以上各式,可解得地面对板的支持力和静摩擦力分别为F N3=2G,12f F G θθ=(cot -tan )3. 如图1—15,两把相同的均匀梯子AC 和BC,由C 端的铰链 连起来,组成人字形梯子,下端A 和B 相距6m,C 端离水平地面4m,总重200 N,一人重600 N,由B 端上爬,若梯子与地面的静摩擦因数μ=0.6,则人爬到何处梯子就要滑动解:进行受力分析,如图所示,把人和梯子看成一个整体,整个系统处于平衡状态:AB=6m,CD=4m,∴AC=BC=5m 设人到铰链C 的距离为l 满足0F =∑, 0M =∑所以12AC BC N N G G G F F ++=+12f f F F =111cos 2BC N N G l G BD F CD F BD θμ⋅⋅+⋅+⋅⋅=⋅整理后:12400N N F F N ==, 2.5l m =所以人在爬到梯子中点处时梯子就要滑动2、塔式起重机的结构如图所示,设机架重P =400 kN,悬臂长度为L =10 m,平衡块重W =200 kN,平衡块与中心线OO /的距离可在1 m 到6 m 间变化,轨道A 、B 间的距离为4 m; ⑴当平衡块离中心线1 m,右侧轨道对轮子的作用力f B 是左侧轨道对轮子作用力f A 的2倍,问机架重心离中心线的距离是多少⑵当起重机挂钩在离中心线OO /10 m 处吊起重为G =100 kN 的重物时,平衡块离OO /的距离为6 m,问此时轨道B 对轮子的作用力F B 时多少机架平衡块挂钩轮子轨道2m 2mLOO /解:⑴空载时合力为零:600 kN A B f f P W +=+=已知:f B =2f A 求得:f A =200 kN f B =400 kN设机架重心在中心线右侧,离中心线的距离为x ,以A 为转轴,力矩平衡4(21)(2)B f W P x ⨯=⨯-+⨯+ 求得:x =1.5 m⑵以A 为转轴,力矩平衡(62)4(2 1.5)(102)B W F P G ⨯-+⨯=⨯++⨯+求得:F B =450 kN5.7. 如图1—19所示,有六个完全相同的长条薄片A i B i i=1,2,... 6依次架在水平碗口上,一端搁在碗口、另一端架在另一薄片的正中位置不计薄片的质量将质量为m 的质点置于A 1A 6的中点处,试求A 1B 1薄片对A 6B 6的压力.7. 解:本题中六个物体,其中通过分析可知A 1 B 1、A 2B 2、A 3B 3、A 4B 4、A 5B 5的受力情况完全相同,因此将A 1 B 1、A 2B 2、A 3B 3、A 4B 4、A 5B 5作为一类,对其中一个进行受力分析、找出规律,求出通式即可.以第i 个薄片AB 为研究对象,受力情况如图1所示, 第i 个薄 片受到前一个薄片向上的支持力Ni F 、碗边 向上的支持力和后一个薄片向下的压力1Ni F +.选碗边 B 点为轴,根据力矩平衡有12Ni Ni LF L F +⋅=⋅,得12Ni Ni F F +=所以512361111()2222N N N N F F F F ==⨯=⋅⋅⋅= ① 再以A 6B 6为研究对象,受力情况如图2所示,A 6B 6受到薄片A 5B 5向上的支持力F N6、碗边向上的支持力和后一个薄片A 1 B 1向下的压力F N1、质点向下的压力mg;选 B 6点为轴,根据力矩平衡有 ② 由①②联立,解得142N mgF =所以A 1B 1薄片对A 6B 6的压力为42mg。
第3章 静力学平衡问题

第3章 静力学平衡问题 §3.1 平衡与平衡条件一、平衡的概念物体的平衡,在工程上是指物体相对于地面保持静止或作匀速直线运动的状态。
平衡是相对于确定的参考系而言的。
静力学所讨论的平衡问题可以是单个刚体,也可以是由若干个刚体组成的刚体系统。
刚体或刚体系统是否平衡取决于作用在其上的力系。
二、平衡条件要使物体保持平衡状态,作用在其上的力必须满足一定的条件,这种条件我们称为力的平衡条件。
从效应上看,物体保持平衡应是既不移动,又不转动。
因此,力系的平衡条件是,力系的主矢和力系对任一点的主矩等于零。
其解析表达式称为平衡方程。
§3.2 平面力系的平衡方程一、平面力系的平衡方程1)基本形式⎪⎩⎪⎨⎧=∑=∑=∑0)(000F M Y X2)二矩式⎪⎩⎪⎨⎧=∑=∑=∑0)(0)(0F F B A M M X 附加条件为:A 、B 两点连线不垂直于x 轴3)三矩式⎪⎩⎪⎨⎧=∑=∑=∑0)(0)(0)(F F F C B A M M M 附加条件为:A 、B 、C 三点不共线特殊力系的平衡方程 1)共线力系:=∑i F2)平面汇交力系:⎩⎨⎧=∑=∑00Y X3)平面力偶系: 0i m =∑4)平面平行力系: )//( 0)(0轴y M Y i o F F ⎩⎨⎧=∑=∑§3.3 空间力系的平衡方程一、空间力系的平衡方程其基本形式的平衡方程为:ΣX=0 ΣM x(F)=0ΣY=0 ΣM y(F)=0ΣZ=0 ΣM z(F)=0必须指出,空间一般力系有六个独立的平衡方程可以求解六个未知量。
具体应用时,不一定使3个投影轴或矩轴互相垂直,也没有必要使矩轴和投影轴重合,而可以选取适宜轴线为投影轴或矩轴,使每一个平衡方程中所含未知量最少,以简化计算。
此外,还可以将投影方程用适当的力矩方程取代,得到四矩式、五矩式以至六矩式的平衡方程。
使计算更为简便。
几种特殊力系的平衡方程1)空间汇交力系ΣX=0ΣY=0ΣZ=02)空间力偶系ΣM x(F)=0ΣM y(F)=0ΣM z(F)=03)空间平行力系(若各力//z轴)ΣZ=0ΣM x(F)=0ΣM y(F)=04)平面任意力系(若力系在Oxy平面内)∑X==∑YM(=∑F)z§3.4 平衡方程的应用一、一般应用举例例3-1,例3-3,例3-4,例3-5(改求起重机不翻平衡块的重量就应是多少?),例3-6,例3-7 补充:已知:带轮D :D1=400 mm ,FT=2000 N ,Ft=1000 N ;齿轮C :D2=200 mm ,a=20° 求:齿轮C 的啮合力Fn ,轴承A 、B 的约束力FA 、FB轴承A 、B 的约束力FA 、FB 就是圆轴受支座中圆孔的约束力,圆孔销钉就是固定铰链两个分力 为说明两分力方向,建立空间直角坐标系Oxyz ?y 轮轴线,z 轴铅直,Oxy 是水平面,三轴垂直 轴承支座表示方法(下图),其约束两分力为xz 方向,用F Ax 、F Az 和F Bx 、F Bz ,或X A 、Z A 和X B 、Z B 侧视图(将轮轴及其受力投影到Oxz 平面上)受力图,没有画轴承A 、B 的约束力,因为没有解除这两个轴承约束=B M ∑02cos 2221t 1T =⨯⨯⨯D F D F D F n a --2000×200-1000×200-Fncos20°×100=0 Fn=2130 N主视图(将轮轴及其受力投影到Oyz 平面上)受力图,其中Fnz=Fncos20°=2130×0.9396=2000 N因主动力Fnz=2000 N 作用点到A 、B 两个支座距离相同,方向向上显然,与之平衡的两支座约束力大小相等,实际方向向下,和受力图所画的方向相反,所以N10002N 20002-====--nzB A F Z Z俯视图(将轮轴及其受力投影到Oxy 平面上) 受力图,其中Fnx=Fnsin20°=2130×0.3420=729 NΣMA=0 -(FT+Ft)×0.15+Fnx ×0.25-XB ×0.5=0 -(2000+1000)×0.15+729×0.25-XB ×0.5=0 XB=-536 NΣFx=0 -FT-Ft+XA-Fnx+XB=0 -2000-1000+XA-729+(-536)=0 XA=4265 N 结论:Fn=2130 NXA=4265 N ; XB=-536 N ZA=-1000 N ; ZB=-1000 N 小结:①轮轴类部件平面解法:1.侧视图求未知主动力 2.主视图求铅直向约束力 3.俯视图求水平向约束力在每一视图上,使用平面力系力的投影方程和力矩平衡方程求解未知力 ②皮带拉力,无论倾斜与否,总是和轮缘相切,对轮轴的力矩等于拉力乘以半径齿轮啮合力一定和其分度圆不相切,对轮轴的力矩=啮合力×cosa ×半径(啮合力×cosa=圆周方向分力)③侧视图上没有画轴承A 、B 的约束力,因为没有解除两个轴承约束(若画有XA 、ZA 和XB 、ZB 四力) 不能用ΣFx=0,-FT-Ft-Fnsina=0求Fn ,因为在x 方向,实际上还有XA 、XB 两力的投影 二、重心1、物体的重心物体的重量(力):物体每一微小部分地球引力的合力。
5.4物体系统的平衡

静定问题
超静定问题
3、特征:具有多余约束。
一个平面自由刚体具有三个自由度,加上一个固定铰支
座后,就不可移动,但可绕A点转动,还有一个自由度。
若再加上一个活动铰支座B,就完全不能动了(即没有自 由度)。 如果再加上一个连杆约束,则此连杆称为多余约束。
2、实例:
静定与超静定问题举例
(一)、多跨静定梁的组成方式和特点
F
y
0
1 FA FB F q2 a G q1 a 0 2
M
1 FA F q2 a G q1 a FB 2.9kN 2
A
(F ) 0
a 3 10 1 M A 3aFB F a q2 a 2.5a G a q1a 0 2 2 3 2
0
FAx FBx 0
FAx FBx 18kN
例3-9 水平梁由AC、CD两部分组成,C处用铰链 相连接,A处是固定端支座,B处是可动铰支座。荷载 及几何尺寸如图所示。 已知:G=1kN,F=2kN,q1=0.6kN/m,q2=0.6kN/m, a=1m,试求A、B处的支座反力。梁重不计。
§5-3 物体系统的平衡
一、物体系统
物体系统由很多个物体组成,这些物体之间以 一定的方式联系着,整个系统又以适当的方式与 其它物体联系。例如图所式的多跨静定梁。
多跨静定刚架 二、内约束与外约束 内约束——在物体系统中各物体之间的联系构成的约束。 例如,铰链 C和D、(或右图中 B和 C)。 外约束——物体系统与其它物体的联系构成的外约束。 例如,图中的A、BD杆为 研究对象。
M
C
(F ) 0
a 1 a FB a G q1 a(a ) 0 2 2 3
物体系统的平衡
Fp2 B
图2-13
第三节 物体系统的平衡 静定与静不定
一、物体系统的平衡问题 例2-6 位于铅垂面的人字梯ACB如图2-11a所示。置于光 滑水平面上,且处于平衡状态,已知Fp =60kN,l=3m,α= 45°。试求铰链C的约束力。
l 3 l 3 l 3
Fp
Fp
解 (1) 选整体为研 究对象,如图2-11b,列
q A
2000
Fp
解 (1)取BC梁为研究对象,如
C
B
a)
图2-12b所示。列平衡方程并求解。
α
1000 1000
M B (F ) 0
FNC 2 cos45 Fp1 0
解得
y B FNBx FNBy
Fp C x FNC α
FNC Fp /(2 cos 45 )
20 /(2 cos 45 )kN 14.14kN
解得
C FNCy FT1
c)
M B (F ) 0
FNA 2Fp / 3 40kN
(2)取CB杆为研究对象,如图2-11c所 示。列平衡方程。
E B
FNCx
FY 0
解得
FNCy FNB 0
FNB
FNCy FNB 20kN
图2-11
M E (F ) 0
FNB (l / 3) sin( / 2) FNCX (2l / 3) cos( / 2)
b) 图2-12
Fx 0
解得
FNBx FNC 14.14sin 45 kN 10kN Fy 0 FNBy FNCcos45 Fp 0
FNBy Fp FNC cos45 (20 14.14cos45 )kN 10kN
高中物理 物体的动态平衡问题解题技巧

物体的动态平衡问题解题技巧一、总论1、动态平衡问题的产生——三个平衡力中一个力已知恒定,另外两个力的大小或者方向不断变化,但物体仍然平衡,典型关键词——缓慢转动、缓慢移动……2、动态平衡问题的解法——解析法、图解法解析法——画好受力分析图后,正交分解或者斜交分解列平衡方程,将待求力写成三角函数形式,然后由角度变化分析判断力的变化规律;图解法——画好受力分析图后,将三个力按顺序首尾相接形成力的闭合三角形,然后根据不同类型的不同作图方法,作出相应的动态三角形,从动态三角形边长变化规律看出力的变化规律。
3、动态平衡问题的分类——动态三角形、相似三角形、圆与三角形(2类)、等腰三角形等二、例析1、第一类型:一个力大小方向均确定,一个力方向确定大小不确定,另一个力大小方向均不确定——动态三角形【例1】如图,一小球放置在木板与竖直墙面之间。
设墙面对球的压力大小为F N1,球对木板的压力大小为F N2。
以木板与墙连接点所形成的水平直线为轴,将木板从图示位置开始缓慢地转到水平位置。
不计摩擦,在此过程中A .F N1始终减小,F N2始终增大B .F N1始终减小,F N2始终减小C .F N1先增大后减小,F N2始终减小D .F N1先增大后减小,F N2先减小后增大解法一:解析法——画受力分析图,正交分解列方程,解出F N1、F N2随夹角变化的函数,然后由函数讨论;【解析】小球受力如图,由平衡条件,有sin 2N =-mg F θ0cos 1N 2N =-F F θ联立,解得:θsin 2N mg F =,θtan 1N mgF =木板在顺时针放平过程中,θ角一直在增大,可知F N1、F N2都一直在减小。
选B 。
解法二:图解法——画受力分析图,构建初始力的三角形,然后“抓住不变,讨论变化”,不变的是小球重力和F N1的方向,然后按F N2方向变化规律转动F N2,即可看出结果。
【解析】小球受力如图,由平衡条件可知,将三个力按顺序首尾相接,可形成如右图所示闭合三角形,其中重力mg 保持不变,F N1的方向始终水平向右,而F N2的方向逐渐变得竖直。
第三章 物体系统的平衡(黄安基书) (2)
课程:理论力学
第三章
物体系统的平衡问题
§3-1 物体系统的平衡问题
物体系:由几个物体通过一定的约束方式联系在 一起的系统。
2 kN/m D E 2m 2.5m 1.5m 4.5m G
20 kN
A B 3m 3m 1.5m C
10 kN
课程:理论力学
第三章
物体系统的平衡问题
1. 内力和外力 外力:系统以外的物体给所研究系统的力。
A E q B D F
FC
C
2 MC (F ) 0, Fa 1.5qa 3FAy FAxa 0
解得
FAy F 1.5qa 3FAy 5500 N
课程:理论力学
第三章
物体系统的平衡问题
再取AEB为研究对象,考虑到DE为二力杆,AEB FAy 受力如图所示。
课程:理论力学
第三章
物体系统的平衡问题
木桁架节点
榫(sun)接
课程:理论力学
第三章
物体系统的平衡问题
钢桁架节点
焊接
铆接
课程:理论力学
第三章
物体系统的平衡问题
钢筋混凝土桁架节点
刚接
课程:理论力学
第三章
物体系统的平衡问题
4、桁架分析目的 (1) 截面形状和尺寸设计 (2) 材料选取 (3) 强度校核 二、模型的建立 屋架结构的简化
的受力情况,画出受力图。
根据受力图的力系类型,可知各有几个独立的平 衡方程,如平面一般力系有三个独立的平衡方程等。 总计独立平衡方程数,与问题中未知量的总数 相比较。 若未知量总数超过独立的平衡方程总数,则问 题是超静定的。
课程:理论力学
第三章
物体系统的平衡问题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章 平衡方程的应用
各种力系的独立方程数
力系 名称
独立 方程数
平面任 意力系
3
平面汇 交力系
2
平面平 行力系
2
平面 力偶系
1
空间任 意力系
q = 5kN/m, = 45;求支座 A、C 的反力和中间铰 B
处的内力。
静定多跨梁一般由几个部分梁组成,组成的次序是先 固定基本部分,后加上附属部分。仅靠本身能承受荷 载并保持平衡的部分梁称为基本部分,单靠本身不能 承受荷载并保持平衡的 部分梁称为附属部分。 求解这类问题通常是先 研究附属部分,再计算 基本部分。
第三章 平衡方程的应用
解:AB 梁是基本部分, BC 梁是附属部分。
1)先取BC梁为研究 对象,列平衡方程
n
M B (Fi ) 0
i1
F 1 FC cos 2 0
FC 14.14kN
n
Fix 0
i1 n
Fiy 0
i1
FBx FC sin 0 FBy F FC cos 0
第三章 平衡方程的应用
第一节 物体系统的平衡问题
物体系统:由若干个物体通过约束联系所组成的系 统称为物体系统,简称为物系。
内力和外力:内力和外力的概念是相对的。当取整 个系统为研究对象时,系统中物体间的相互作用为 内力。但当研究物系中某一物体或某一部分的平衡 时,物系中的其它物体或其它部分对所研究物体或 部分的作用力就成为外力,必须予以考虑。
6
对于 n 个物体组成的系统,在平面任意力系作用下, 可以列出 3n 个独立平衡方程。在平面汇交力系作用 下,可以列出 2n 个独立平衡方程。
第三章 平衡方程的应用
静定问题:若所研究的问题的未知量的数目等于 或少于独立平衡方程的数目时,则所有未知量都 能由平衡方程求出,这类问题称为静定问题。
第三章 平衡方程的应用
FBx 10kN FBy 10kN
第三章 平衡方程的应用
2)再取AB梁为研究 对象,列平衡方程
n
M A(Fi ) 0
i1
M
A
1 2
q
2
2
FBy
2
ห้องสมุดไป่ตู้
0
M A 30kN m
n
Fix 0 FAx FBx 0
i1
FAx 10kN
n
Fiy 0
i1
FAy 2q FBy 0
FAy 20kN
n
Fix 0
i1
F FS cos 0
n
Fiy 0 FN FS sin 0
i1
解得
FS
c
F
os
F
l l2 r2
FN FS sin F
r l2 r2
(2)再取飞轮和曲柄一起为研究对象为研究对象, 列平衡方程:
第三章 平衡方程的应用
(2)再取飞轮和曲柄一起为研究对象为研究对 象,列平衡方程:
第三章 平衡方程的应用
例3-2 如图所示,一构架由杆 AB 和 BC 所组成, 载荷 F = 20kN。已知 AD = DB = 1m,AC = 2m,滑轮 半径均为 0.3m,如不计滑轮重和杆重,求 A 和 C 处 的约束反力。
解 (1)先取整体研究,
列平衡方程:
n
MC (Fi ) 0
i1
FAx 2 F 2.3 0
n
Fix 0
i1
FAx FCx 0
n
Fiy 0 FAy FCy F 0
i1
FAx 23kN FCx FAx 23kN
第三章 平衡方程的应用
(2)再取 BC 杆研究,列平衡方程:
n
M B (Fi ) 0
i1
FT 1.3 FCy 2 FCx 2 0
FT F FCy 10kN FAy F FCy 10kN
第三章 平衡方程的应用
例3-3 如图所示,曲柄连杆机构由活塞、连杆、
曲柄和飞轮组成。已知飞轮重G,曲柄OA长 r ,连杆 AB 长 l ,当曲柄 OA 在铅垂位置时系统平衡,作用于 活塞 B 上的总压力为 F,不计活塞、连杆和曲柄的重 量,求阻力偶矩 M、轴承O的反力。
第三章 平衡方程的应用
解 (1)先以活塞B为研究对象, 列平衡方程:
静不定问题:若未知量的数目多于独立平衡方程的 数目,则未知量不能全部由平衡方程求出,这类问 题称为静不定问题(或称超静定问题),总未知量 数与总独立平衡方程数两者之差称为静不定次数。
第三章 平衡方程的应用
例3-1 多跨静定梁由 AB 梁和 BC 梁用中间铰 B 连 接而成,支承和荷载情况如图所示,已知 F = 20kN,
n
Fix 0
i1 n
Fiy 0
i1 n
MO (Fi ) 0
i1
FS cos FOx 0 FSsin FOy G 0
rFScos M 0
FOx FS cos F
解得
FOy G F
r l2 r2
M rFScos Fr
第三章 平衡方程的应用
感谢下 载