自动控制原理 2016年考研题
全国名校自动控制原理考研真题汇编(含部分答案)
2013年中国 学技术大学848 动控制原理
2014年中国 学技术大学848 动控制原理
5.北京
天大学 动控制原பைடு நூலகம் 合
2012年北京
天大学931 动控制原理 合
2013年北京
天大学931 动控制原理 合
2014年北京
天大学931 动控制原理 合
6.山东大学 动控制原理
2016年山东大学847 动控制原理(含现代控制理 )
8.其他院校自动控制原理考研 真题(含部分答案)
2010年华中科技大学829自动控制原理考研真 题及答案
2011年南京大学961自动控制原理考研真题
2011年重庆大学839自动控制原理一考研真题
2013年厦门大学844自动控制原理考研真题
2013年华南理工大学813自动控制原理考研真 题
2014年华南理工大学813自动控制原理考研真 题
2015年华南理工大学813自动控制原理考研真 题
2016年华南理工大学813自动控制原理考研真 题
2017年华南理工大学813自动控制原理考研真 题
2018年华南理工大学813自动控制原理考研真 题
2012年电子科技大学839自动控制原理考研真 题及详解
参 案:
2013年电子科技大学839自动控制原理考研真 题及详解
参 案:
2014年电子科技大学839自动控制原理考研真 题
4.中国科学技术大学自动控制 原理考研真题
2013年中国科学技术大学848自动控制原理考 研真题
6.山东大学自动控制原理考研 真题
2016年山东大学847自动控制原理(含现代控 制理论)考研真题
2017年山东大学847自动控制原理(含现代控 制理论)考研真题
成都电子科技大学自动控制原理2006-2016年考研初试真题+答案
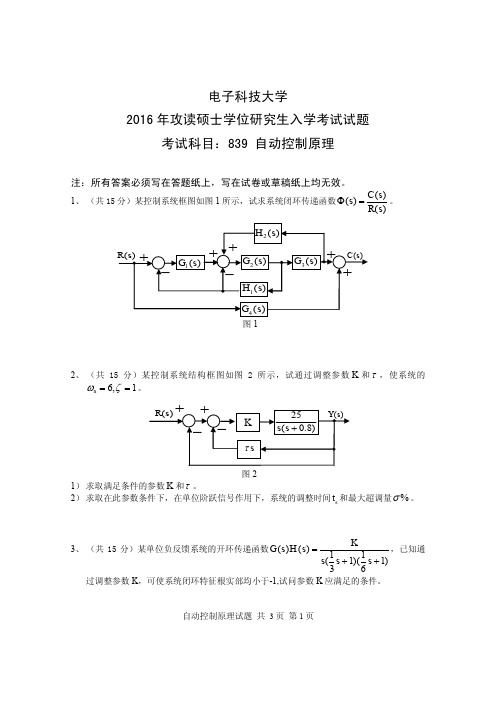
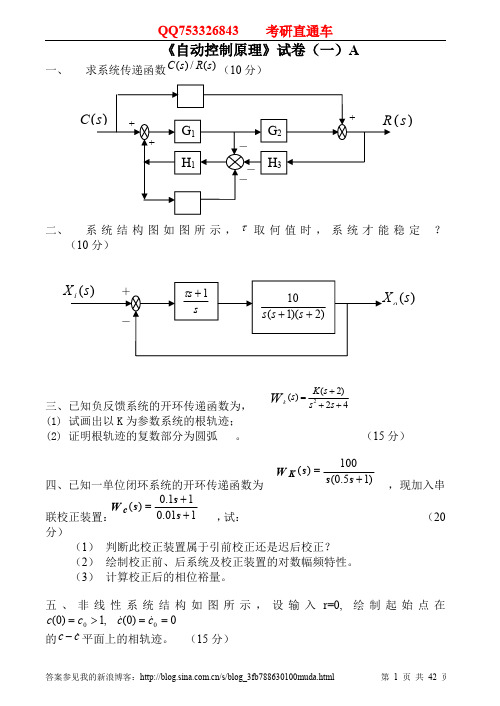
自动控制原理试题 共 3页 第1页电子科技大学2016年攻读硕士学位研究生入学考试试题考试科目:839 自动控制原理注:所有答案必须写在答题纸上,写在试卷或草稿纸上均无效。
1、 (共15分)某控制系统框图如图1所示,试求系统闭环传递函数()()()C s s R s Φ=。
图12、 (共15分)某控制系统结构框图如图2所示,试通过调整参数K 和τ,使系统的6,1n ωζ==。
图21) 求取满足条件的参数K 和τ。
2) 求取在此参数条件下,在单位阶跃信号作用下,系统的调整时间s t 和最大超调量%σ。
3、 (共15分)某单位负反馈系统的开环传递函数()()11(1)(1)36KG s H s s s s =++,已知通过调整参数K ,可使系统闭环特征根实部均小于-1,试问参数K 应满足的条件。
自动控制原理试题 共 3页 第2页4、 (共15分)某负反馈控制系统开环传递函数20()()(1)(2)(5)G s H s s s s =-++,试绘制系统的Nyquist 图,并使用Nyquist 稳定判据分析系统稳定性。
5、 (共15分)某系统结构框图如图3所示,其状态变量为123,,x x x ,试写出系统的状态方程和输出方程。
图36、 (共20分)某旋翼飞机控制系统结构图如图4所示。
图41) 试绘制当参数K 由0→∞变化时,系统的根轨迹图。
2) 当K=1.9时,试确定阵风扰动1()N s s=时,系统的稳态误差。
)自动控制原理试题 共 3页 第3页7、 (共20分)某离散系统如图5所示,采样周期T=0.07s 。
图51) 试求系统的闭环脉冲传递函数。
2) 试判断系统的稳定性,并求出系统单位阶跃响应的终值。
8、 (共20分)某非线性系统如图6所示,其中,非线性元件的描述函数为:21()arcsin ,1N A A A π⎡=+≥⎢⎣图6试判断系统稳定性,并判断是否会产生自持振荡,如会,则求出自持振荡的频率和幅值。
南京航空航天大学《820自动控制原理》历年考研真题专业课考试试题
2011年南京航空航天大学820自动控制原理考研真题 2012年南京航空航天大学820自动控制原理考研真题 2013年南京航空航天大学820自动控制原理考研真题 2014年南京航空航天大学820自动控制原理考研真题 2015年南京航空航天大学820自动控制原理考研真题 2016年南京航空航天大学820自动控制原理考研真题 2017年南京航空航天大学820自动控制原理考研真题 2018年南京航空航天大学820自动控制原理考研真题
2011年南京航空航天大学820自动 控制原理考研真题
2012年南京航空航天大学820自动 控制原理考研真题
2013年南京航空航天大学820自动 控制原理考研真题
2014年南京航空航天大学820自动 控制原理考研真题
2015年南京航空航天大学820自动 控制原理考研真题
2016年南京航空航天大学820自动 控制原理考研真题
2017年南京航空航天大学820自动 控制原理考研真题
2018年南京航空航天大学820自动 控制原理考研真题
信息工程大学821自动控制原理2015-2016年考研专业课真题试卷

s(s+1)
Ks
(1)求系统稳定时 K 的取值范围;
(2)求输入为
r(t)
1 2
t2 时,系统的静态加速度误差系数
Ka
;
(3)分析系统的局部反馈 Ks 对系统稳态误差 ess 的影响。
四、(25 分)已知控制系统结构图如下图所示:
R(s) +
_
K 0.5s+1
1
C(s)
s(s+1)
(1)绘制系统的根轨迹图; (2)采用根轨迹法分析系统的稳定性。
as
(1)当 a = 0 时,求系统的阻尼比 、无阻尼自振频率n 和单位斜坡函 数输入时的稳态误差;
第1页 共3页
(2)当 = 0.7 时,求系统中的 a 值和单位斜坡函数输入时系统的稳态误 差。
三、(20)已知具有局部反馈回路的控制系统结构图如下图所示:
R(s) +
_
s+1
+
1
C(s)
s
_
信息工程大学2016年考研专业课真题试卷(原版)
821 自动控制原理
(共八题,满分 150 分)
一、(20 分)已知 RC 网络电路图如下图所示,其中 Ur 为网络输入量,
Uc 为网络输出量。
i2
C1
Ur
R1
R2
Uc
C2
(1)采用复数阻抗法画出系统结构图; (2)求取网络传递函数 Uc(s)/Ur(s)。 二、(15 分)已知二阶控制系统的单位阶跃响应曲线如下图所示,
八、(15 分)已知闭环离散系统结构图如下图所示,
R(s) + E(s)+
_
_T
自动控制原理考研真题试卷
自动控制原理考研真题试卷一、选择题(每题2分,共20分)1、在闭环控制系统中,调节器的输出信号是()A.调节器的输入信号B.调节器的输出信号C.调节器输入信号的函数D.被控对象的输出信号2、在单闭环控制系统中,如果系统开环增益无穷大,则系统可能发生()A.振荡B.失稳C.跟随误差D.超调量3、在系统设计中,为了避免积分饱和,可以采取的措施是()A.采用微分项调节器B.采用积分项调节器C.采用比例-积分-微分(PID)调节器D.采用抗积分饱和调节器4、在反馈控制系统中,如果系统存在干扰,则可以通过()来减小干扰对系统的影响。
A.增加执行机构B.增加测量元件C.增加调节器D.增加滤波器5、在连续控制系统中,如果控制器采用比例调节器,则系统的稳态误差将()A.与输入信号成正比B.与输入信号成反比C.与输入信号的平方成正比D.与输入信号的绝对值成正比6、在离散控制系统中,如果采样周期很短,则系统的稳态误差将()A.很大B.很小C.与采样周期无关D.为零7、在控制系统中,通常采用()来克服扰动对系统的影响。
A.滤波器B.放大器C.调节器D.编码器8、在控制系统设计中,通常采用()来提高系统的稳定性和响应速度。
A.串联校正B.并联校正C.反馈校正D.前馈校正9、在数字控制系统中,通常采用()来处理模拟信号。
A. A/D转换器B. D/A转换器C.模拟滤波器D.数字滤波器10、在控制系统设计中,通常采用()来提高系统的抗干扰能力。
华东师范大学是一所著名的综合性大学,其化学学科在国内具有很高的声誉。
对于想要报考华东师范大学化学专业研究生的同学来说,了解普通化学原理历年真题是非常重要的。
本文将介绍华东师范大学考研普通化学原理历年真题,帮助考生更好地备考。
一、2015年真题1、名词解释本文1)摩尔质量本文2)气体常数本文3)沉淀平衡本文4)氧化还原反应2、简答题本文1)简述拉乌尔定律和亨利定律,并说明它们在描述液体蒸气压中的应用。
自动控制原理试卷及答案20套
D.抛物线响应函数 答 ( )
3、(本小题 3 分) 如图所示是某系统的单位阶跃响应曲线,下面关于性能指标正确的是――
h (t )
1 .3
1.02
1
0
t
2
B.
4
C.
6
8
10
12
14
A.
t r 6s
t s 4s
t p 14s
D.
% 30%
答
( ) 4、(本小题 5 分)
W (s)
答案参见我的新浪博客:/s/blog_3fb788630100muda.html
第 7 页 共 42 页
QQ753326843
考研直通车
6.已知非线性控制系统的结构图如图 7-38 所示。为使系统不产生自振,是利用 描述函数法确定继电特性参数 a,b 的数值。 (15 分)
答案参见我的新浪博客:/s/blog_3fb788630100muda.html 第 1 页 共 42 页
QQ753326843
考研直通车
r _
e
2 0 1
u
1 s2
c
六、采样控制系统如图所示,已知 K 10, T 0.2s : 1.求出系统的开环脉冲传递函数。 1 2 2.当输入为 r (t ) 1(t ) t * 1(t ) 2 t * 1(t ) 时,求稳态误差 e ss 。
第 5 页 共 42 页
QQ753326843
3.当输入为
1 2 2
考研直通车
r (t ) 1(t ) t * 1(t ) t * 1(t ) 时,求稳态误差 e ss 。
R(s)
E (s)
1 e sT s
精编版-2016江苏南京航空航天大学自动控制原理考研真题(A)
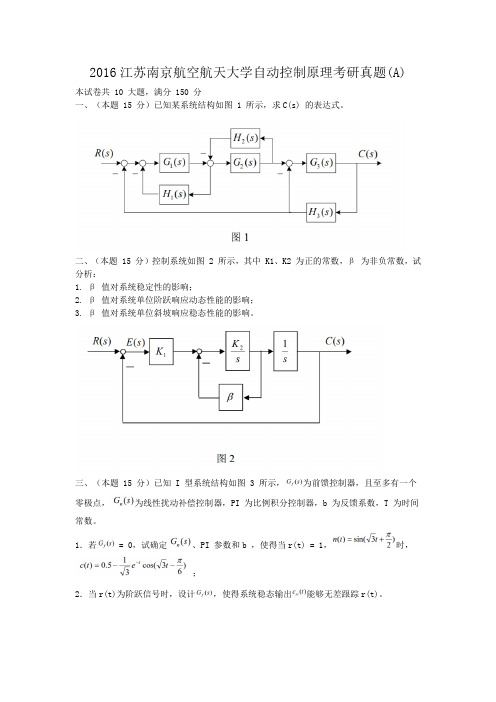
2016江苏南京航空航天大学自动控制原理考研真题(A)本试卷共 10 大题,满分 150 分一、(本题 15 分)已知某系统结构如图 1 所示,求C(s) 的表达式。
二、(本题 15 分)控制系统如图 2 所示,其中 K1、K2 为正的常数,β为非负常数,试分析:1. β值对系统稳定性的影响;2. β值对系统单位阶跃响应动态性能的影响;3. β值对系统单位斜坡响应稳态性能的影响。
三、(本题 15 分)已知 I 型系统结构如图 3 所示,为前馈控制器,且至多有一个零极点,为线性扰动补偿控制器,PI 为比例积分控制器,b 为反馈系数,T 为时间常数。
1.若 = 0,试确定、PI 参数和b ,使得当r(t) = 1,时,;2.当r(t)为阶跃信号时,设计,使得系统稳态输出能够无差跟踪r(t)。
四、(本题 15 分)系统结构如图 4 所示,其开环传递函数在s = −2之左具有一对重极点,试确定闭环系统处于临界阻尼时的a 、b 。
五、(本题 15 分)已知某单位反馈三阶系统,当输入信号r(t) = 2 + 0.5t 时,稳态误差为 0.5,系统开环幅相曲线如图 5 所示,试分析:1. 求系统临界稳定时的开环增益 Kc ;2. 若穿越频率ωx = 1,求系统的相角裕度γ,并绘制开环对数幅频渐近曲线;3. 试设计串联校正环节,使校正后系统满足截止频率ωc ≥ 1、相角裕度γ≥ 45°。
六、(本题 15 分)设系统结构图如图 6 所示,其中。
1. 试绘制a = 0 时的开环幅相曲线,并用奈氏判据判断该系统的闭环稳定性;2. a > 0 ,若系统开环截止频率ωc 为 4,问能否满足相角裕度γ >的要求;3. 讨论参数a 对系统稳定性的影响。
七、(本题 15 分)已知离散系统的结构图如图 7 所示,试分析:1. 判断系统稳定性,并分析采样周期T 对系统稳定性的影响;2. 若采样周期T = 0.4 ,输入信号为单位阶跃函数时,求c(3T) 。
华南理工大学813自动控制原理2014-2016年考研真题试卷

813华南理工大学2014年攻读硕士学位研究生入学考试试卷(试卷上做答无效,请在答题纸上做答,试后本卷必须与答题纸一同交回)科目名称:自动控制原理适用专业:机械制造及其自动化;机械电子工程;机械设计及理论;测试计量技术及仪器;机械工程(专硕);仪器仪表工程(专硕)共4页一.填空题(24分,每空2分)1.在控制系统中,线性系统是满足原理的系统。
2.按系统有无反馈,通常可将控制系统分为和。
3.传递函数21s的相角为。
4.频率响应的输入信号为。
5.已知某二阶系统的单位阶跃响应输入为衰减的振荡过程,那么可以推断其阻尼比ξ的范围为。
6.已知一个单位负反馈系统,其开环传递函数()()14k G s s s =+,在单位阶跃输入作用下的稳态误差是。
7.一个系统的微分方程为()()()()65y t yt y t u t ++=,该微分方程所代表的系统的阶数和性质是。
8.对于一个物理可实现系统,传递函数分母s 的阶次n 和分子阶次m 的关系是。
9.一阶系统11Ts +的单位阶跃响应的时域表达式是。
10.设惯性环节的频率特性为()()201G j j ωω=+,当频率ω从0变化到∞时,则幅相频特性曲线是一个半圆,该半圆位于极坐标平面的第象限。
11.稳态误差不仅取决于系统自身的结构参数,而且与的类型有关。
813华南理工大学2015年攻读硕士学位研究生入学考试试卷(试卷上做答无效,请在答题纸上做答,试后本卷必须与答题纸一同交回)科目名称:自动控制原理适用专业:机械工程;测试计量技术及仪器;机械工程(专业学位);仪器仪表工程(专业学位)共5页一.填空题(24分,每空2分)1.对一个自动控制系统的基本要求可归结为三个方面,即:。
2.一阶系统11Ts +的单位脉冲响应的时域表达式为。
3.根轨迹的起点和终点分别为。
4.设某一环节的频率特性为1()1G j j ωω=-+,当频率ω从0变化到∞,该环节的幅相曲线位于极坐标平面第象限的一个半圆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
河北大学2016年硕士研究生入学考试试卷
一、填空题(共30分,1-7题每空1分,8-11题每空2分,答案一律写在答题纸上)
1、经典控制理论中,描述系统运动的数学模型主要有 和 ;现代控制理论中,描述系统运动的数学模型为 ,其中包括 方程和 方程。
2、系统的 响应代表由系统的初始状态所引起的系统的自由运动;系统的 响应代表由系统的输入所激励的强制运动。
3、设单位反馈系统的开环传递函数为,)
12(10)(+=s s s G 当系统的输入为单位阶跃信号l(t)时,系统的静态误差为 ;单位斜坡输入时,系统的静态误差为 ;单位加速输入时,系统的静态误差为 。
4、某系统特征多项式为
)44)(1(2+++s s s ,则系统的固有运动模态为 、 和 。
5、离散控制系统的数学模型主要有 和 。
6、根据系统分频段设计思想,低频段主要考虑系统的 特性,中频段主要考虑系统的 性,高频段主要考虑系统的 能力。
7、系统状态反馈不能够改变 的特征多项式和特征值,输出反馈不能够改变 的特征多项式和特征值。
8、某传递函数为)
1(2)(+=
s s s G 的系统,若输入信号为)60sin()( +=t t r ,其稳态输出为 。
9、已知系统的传递函数为
1
21+s ,则系统的单位脉冲响应为 。
10、已知系统的传递函数为2513)(23++++=s s s s s G ,写出系统的能控标准型实现 ,能观标准型实现 。
11、用C(z)表示以下采样系统的输出为 。
二、简答题(共30分,每题10分)
1、说明稳定裕量的定义,以开环传递函数)
1)(11.0(1)(++=s s s s G 为例子BODE 图和NYQUIST 图中标出相角稳定裕量和增益稳定裕量。
2、以下是通过改变载热介质流量进行出口温度控制的系统流程,请画出温度控制系统方框图,并说明每个方框的作用。
如果冷物料流量发生变化,对系统产生什么影响?请绘制在结构图中。
3、写出在参考输入R(s)和扰动输入F(s)共同作用下,系统输出Y(s)的表达式。
三、计算题(90分)
1、(15分)设闭环采样系统如下图所示,其中采样周期T=0.1s ,试求系统稳定时K 的变化范围。
2、(15分)设控制系统结构如图所示,其中)(s G p 是调节器的传递函数。
(1)(10分)当采用比例调节器p p K s G =)(时,绘出以p K 为参变量的根轨迹图。
(2)(5分)试确定出使闭环系统稳定的比例系数p K 取值范围。
3、(15分)设单位反馈系统的开环传递函数为)
12)(1()(0++=s s s K s G ,绘制出开换系统Nyquist 概略曲线,并讨论使闭环系统稳定的K 的取值范围。
4、(20分,每个小题10分)某最小相位的单位负反馈系统,已知开环对数幅频特性曲线如左图所示,应用串联校正后系统的开环对数幅频特性如右图所示。
(1)写出校正前和校正后系统的开环传递函数。
(2)确定使用的是何种串联校正方式,并说明此校正的作用。
5、(15分)给定系统的状态空间方程为
[]x y u x x 11,101001=⎥⎦
⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-= (1)(10分)判断系统是否为状态稳定?是否输出稳定?说明状态稳定和输出稳定的关系。
(2)(5分)初始状态为⎥⎦
⎤
⎢⎣⎡=110x 时,求出系统中零输入作用下的状态响应)(t x 。
6、(10分,每题5分)系统的状态空间表达式为[]x y u x x 11,103110=⎥⎦
⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-= (1)试求状态反馈阵K ,使系统的闭环极点配置到-2,-2.
(2)写出闭环系统的状态空间表达式,画出用状态反馈实现极点配置的控制系统模拟。