自动控制理论第六章11
自动控制理论 第6章

20 40
20dB / dec
20lg K
1
40dB / dec
20dB / dec
10lg
c2
1 c1
2
2019/9/1
安徽工业大学电气信息学院
(二)串联滞后校正 迟后校正环节分析
Gc
(s)
1 Ts
1 Ts
( 1)
串联迟后校正不影响系统的相对稳定性的条件是 在根轨迹图上通过校正前后系统的相轨迹不发生 明显的变化,因而闭环主导极点的位置不发生明 显改变来保证的。 在这种情况下,校正前后闭环主导极点对应的增 益系数如何变化,增大、还是减小?
2019/9/1
安徽工业大学电气信息学院
§6-2 串联校正的设计
(一)串联超前校正
超前校正及其特性
1.
M (s)
(s)
k p (1 d
s)(PD控制器)
L(dB)
20dB / dec
0 20lg k p
( ) 90
2019/9/1
45
0
安徽工业T1 大学电气信息学院
2.
T T 1 T 2 2
( )
70
60
50 30
40
30
10
20 10
5 3
0
0.01
0.1
1
2019/9/1
安徽工业大学电气信息学院
10 T
20 lg G0 ( jc ) 20 lg Gc ( jc ) 10lg
20 lg G0 ( jc ) Gc ( jc ) 0 20 lg G0 ( jc ) Gc ( jc ) 0 20 lg Gc ( jc ) 10 lg
自动控制原理第六章课后习题答案(完整)

自动控制原理第六章课后习题答案(免费)线性定常系统的综合6-1 已知系统状态方程为:()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭= 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3.解: 由()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=可得:(1) 加入状态反馈阵()012K k k k =,闭环系统特征多项式为:32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+-(2) 根据给定的极点值,得期望特征多项式:*32()(1)(2)(3)6116f λλλλλλλ=+++=+++(3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k ===即:()408K =6-2 有系统:()2100111,0x x u y x•-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭= (1) 画出模拟结构图。
(2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。
解(1) 模拟结构图如下:(2) 判断系统的能控性;0111c U ⎡⎤=⎢⎥-⎣⎦满秩,系统完全能控,可以任意配置极点。
(3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为:()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式:*2()(3)(3)69f λλλλλ=++=++比较()f λ与*()f λ各对应项系数,可解得:011,3k k ==即:[1,3]K =6-3 设系统的传递函数为:(1)(2)(1)(2)(3)s s s s s -++-+试问可否用状态反馈将其传递函数变成:1(2)(3)s s s -++若能,试求状态反馈阵,并画出系统结构图。
《自动控制理论教学课件》第六章 自动控制系统的校正.ppt

并有强烈的振荡。难以兼顾稳态和暂态两方面的要求。
② 采用PD控制时
(s)
C(s) R(s)
s2
K
2
Pn
(1
s)
(2n
K
2
Dn
)s
K
2
Pn
特征方程:1 KD s2
n2s
2n
s
K
2
Pn
0
等价开环传函:G1(s)
s2
n2s 2ns
K
2
Pn
为满足稳态误差要求,KP 取得足够大,若 KP 2 则有:
PD控制器中的微分控制规律,能反映输入信号的变 化趋势(D控制实质上是一种“预见”型控制),产生有效 的早期修正信号,以增加系统的阻尼程度,能有效地抑制 过大的超调和强烈的振荡,从而改善系统的稳定性。在串
联校正时,可使系统增加一个 KP KD 的开环零点,使 ,
有助于动态性能的改善。
注意:
D控制作用只对动态过程起作用,而对稳态过程没有 影响,且对系统噪声非常敏感,所以一般不宜单独使用。
一、性能指标
为某种特殊用途而设计的控制系统都必须满足一定的 性能指标。不同的控制系统对性能指标的要求应有不同的 侧重。如调速系统对平稳性和稳态精度要求较高,而随动 系统则侧重于快速性要求。性能指标的提出,应符合实际 系统的需要和可能。
在控制系统的设计中,采用的设计方法一般依据性能指
标的形式而定,若性能指标以 ts、 %、 、稳态误差等
s1,2 n jn KP 2
dK D ds
0
s
n
KP
2( KD
KP ) n
可见,K D (微分作用增强),根轨迹左移。尽管为满足 稳态要求,KP 选得很大,但总可以选择合适的 KD 值,使系
自动控制理论 第2版 第六章 控制系统的校正
*
设计过程
例2:设一单位反馈系统的开环传递函数为 要求相角裕度 ,设计校正环节。 首先画出 时的BODE图,由图可知相角裕度只有25度,即 。 采用滞后网络进行校正目的是要增大相角裕度。对于原系统 这时相角裕度
也就是说设法找到一个滞后网络应把原系统在 上的幅值减小到0,并对此频率附近的原系统的相角曲线产生不明显的影响(只有这样才能维持 )。
超前校正
总结: 1)超前校正原理: 利用超前网络的相角超前特性,使系统的截止频率和相角 裕度满足性能指标的要求,从而改善闭环系统的动态性能 2)适用对象: 超前校正主要应用于原系统稳定,稳态性能已满足要求而 动态性能较差的系统。 3)缺点:降低了系统的抗扰性能。
6-3 串联滞后校正
对应上面三种情况的BODE图:
c)低中高频段均改变
b)改变高频段
a)改变低频段
6-2 串联超前校正
无源超前校正网络
一、超前校正网络:
传递函数:
* 带有附加放大器的无源超前校正网络
二、超前校正环节的频率特性
超前网络 bode图
对数频率特性为 :
最大超前角与系数 a 的关系曲线
画出未校正系统BODE图
相角裕度
测量可得原系统的相角裕度 ,所以远 远小于要求值,说明在 时系统会产生 剧烈的振荡,为此需要增加 的超前角。
注意:超前校正环节不仅改变了BODE图的 相角曲线,而且改变了幅值曲线,使幅值 穿越频率提高,在新的幅值穿越频率上, 原系统的滞后相角就会增大,这就要求超 前校正装置产生的相角要相应的增大,为 此设计超前相角由增大到 。
(2)使校正后系统频带变宽,动态响应变快。
(3)校正装置的最大相角频率 设在 处。
自动控制理论_11结构不稳定及改进措施

三.输入信号作用下的稳态误差与系统结构参数的关系
将G(s)H(s)写成典型环节串联形式:
2 2 K (1s 1)( 2 s 2 ' 2 s 1) KN0 (s) G( s ) H ( s ) 2 2 s (T1s 1)(T2 s 2 T2 s 1) s D0 (s)
V0 R( s ) 2 s
当 0时,ess
V0 当 1时,e ss K 当 2时,ess 0
要消除斜坡信号作用下 的稳态误差,开环传递 函数中至少要有两个积 分环节。
3.等加速信号作用下 2 a0 t a0 r (t ) 1( t ) R( s ) 3 s 2
E ( s) 1 e ( s) R( s ) 1 G ( s ) H ( s )
将闭环传函在s=0的邻域展开成泰勒级数
1 2 e ( s ) e (0) ( 0 ) s ( 0 ) s e e 2!
1 2 E ( s ) e (0) R( s ) ( 0 ) sR ( s ) ( 0 ) s R( s ) e e 2! 1 (l ) l e (0) s R( s ) l!
1. 改变积分性质
用反馈 K H 包围积分环节或者包围电动 机的传递函数,破坏其积分性质。
X2 s K0 X1 s s K0 K H
X2 s Km X1 s Tm s 1 s Km K H
2.引入比例-微分控制
在原系统的前向通路中引入比例-微分控制。
稳态误差定义:稳定系统误差的终值称为稳态 误差。当时间t趋于无穷时,e(t)的极限存在,则 ess lim e(t ) 稳态误差为 t
自动控制原理第六章ppt课件

23.3
由上面分析可见,降低增益,将使系统的稳定性得到改善,
超调量下降,振荡次数减少,从而使穿越频率ωc降低。这意
味着调整时间增加,系统快速性变差,同时系统的稳态精度也 变差。
6.3.2 串联比例微分校正 比例微分校正也称PD校正,其装置的传递函数为
180 90 arctan 0.01 35 70.7
比例微分环节起相位超前的作用,可以抵消惯性环节使 相位滞后的不良影响,使系统的稳定性显著改善,从而使穿 越频率ωc提高,改善了系统的快速性,使调整时间减少。 但 比例微分校正容易引入高频干扰。
比例微分校正对系统性能的影响
6.3.3 串联比例积分校正 比例积分校正也称PI校正,其装置的传递函数为
工程实践中常用的补偿方法: 串联补偿、反馈补偿和前馈补偿。
4、系统补偿装置的设计方法
▪ 分析法
系统的 分析和经验 一种
选择参数
固有特性
补偿装置
串联补偿和反馈补偿
▪ 综合法
系统的 系统的性能指标 期望开环
固有特性
系统特性
验证 性能指标
确定补偿 装置的结 构和参数
6.1.2 频率响应法串联补偿(校正)
C0
R1 C1
-
R0
+
R0
G1(s) 式中
K
(1s
1)( 1s
2s
1)
K R1 R2
1 R1C1 2 R0C0
L()
1
() / 1
90
90
1 2
6.3 串联校正
串联校正是将校正装置串联在系统的前向通道中,从而 来改变系统的结构,以达到改善系统性能的方法,如图所示。 其中Gc(s)为串联校正装置的传递函数。
自动控制理论_11结构不稳定及改进措施
二、稳态误差的计算
若e(t)的拉普拉斯变换为E(s) ,且
lime(t),lim sE(s)存在,则有
t
s0
ess
lime(t)=lim sE(s)
t
s0
lsim0 1
sR(s) G(s)H
(s)
注:
在计算系统误差的终值(稳态误差)时,遇到的
误差象函数E(s)一般是s的有理分式函数,这时
当且仅当sE(s)的极点均在左半复平面,就可保
(s)
称 EN (s) 为系统对干扰的误差传递函数。
综合上述各式有:E(s) ER (s)R(s) EN (s)N (s)
若具备应用终值定理的条件,则有
ess
lim
t 0
sE ( s)
essr
essn
例1 系统结构图如图所示,求 r(t)分别为A·1(t), At,
At2/2时系统的稳态误差。
证
lime(t),lim sE(s)
t
s0
存在,
ess
lim e(t )=lim
t
s0
sE(s)
成立。
系统如图,若定义e(t)=r(t)-b(t),则E(s)=R(s)-B(s)
B(s) BR (s)R(s) BN (s)N (s) 其中BR (s)为B(s)对R(s)的闭环传函, BN (s)为B(s)对干扰信号N (s)的闭环传函。
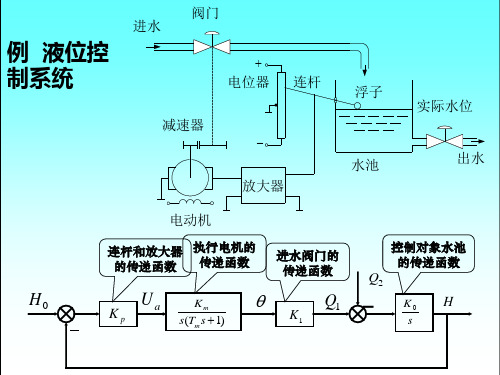
进水
阀门
例 液位控 制系统
+ 电位器 连杆
浮子
减速器
放大器
水池
实际水位 出水
电动机
连杆和放大器 执行电机的 的传递函数 传递函数
进水阀门的 传递函数
控制对象水池 的传递函数
自动控制理论第六章控制系统的校正与设计

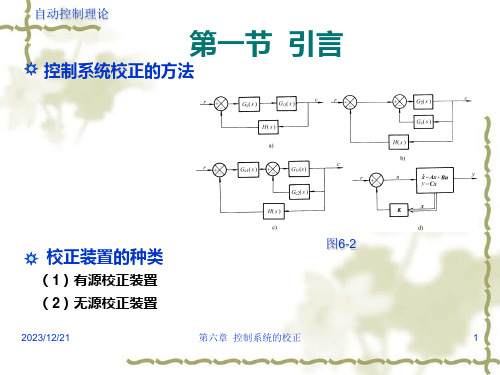
第一节 系统校正的一般方法
幅相频率特性曲线:
Im
Gc(s)=
1+aTs 1+Ts
令
dφ(ω) dω
=0
得
ωm=
1 Ta
=
1 T
·aT1
0
φm 1ω=0 α+1
2
ω=∞
α Re
两个转折频率的几何中点。
最大超前相角:
sinφm=1+(a(a––11)/)2/2
=
a–1 a+1
φm=sin-1
a–1 a+1
滞后校正部分:
(1+ T1S) (1+αT1S)
超前校正部分:
(1+ T2S)
(1+
T2 α
S)
L(ω)/dB
1
1
0 α T1
T1
-20dB/dec
φ(ω)
0
1α
T2
T2
ω
+20dB/dec
ω
第一节 系统校正的一般方法
(2) 有源滞后—超前
R2
校正装置 传递函数为:
ur R1
GGcc(式(ss))中==K:(K1(cc1(+(1+1aK+T+TTcT01=S1S1S)SR)()()12(1R(+1+1+1+RT+TaT33T2S2S2S)S))) T1=
a=
1+sinφm 1–sinφm
第一节 系统校正的一般方法
(2) 有源超前校正装置
R2 C
R3
Gc(s)=
R3[1+(R1+R2)Cs] R1(1+R2Cs)
自动控制理论第六章
1
ss 0.5s1 s
解:1)调整K
G0 s
ss
1
0.5s1
s
Kv
lim
s0
G0
s
K
5s 1
2)作未校正系统的Bode图
G1 jω
jω1
5
j0.5ω1
jω
ωc 2.15,γ 20
系统不稳定
2023/12/21
第六章 控制系统的校正
15
自动控制理论
3)选择新的ωc
φ 180 γ ε 180 40 12 128
系数Kv=20s-1,r=50°,20lgKg=10dB
解:
令Gc s
K c
1 Ts
1 Ts
K
1 Ts
1 Ts
1)调整开环增益K,满足Kv的要求
校正前开环传递函数为
G1 s
KG0 s
4K
ss 2
Kv
lim
s0
s4K
ss 2
2K
20 ,
K
10
校正前系统的开环频率特性为
2023/12/21
G1 jω
K v
2s1
2023/12/21
第六章 控制系统的校正
图6-9
4
自动控制理论
2)确定希望的闭环极点
由ωn 4, ξ 0.5,求得sd 2 j2 3,
3)计算超前校正装置在sd处产生的超前角
arg
4
ss
2
ssd
210
超前角: φ 30
4)确定超前校正装置的零、极点
根据θ 60 ,φ 30 ,求得γ 45.按最大α值的设计法,由图解得
基于频率法的滞后-超前校正
自动控制理论第六讲__方框图35页PPT

42、只有在人群中间,才能认识自 己。——德国
43、重复别人所说的话,只需要教育; 而要挑战别人所说的话,则需要头脑。—— 玛丽·佩蒂博恩·普尔
44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
自动控制理论第六讲__方框图
11、获得的成功越大,就越令人高兴 。野心 是使人 勤奋的 原因, 节制使 人枯萎 。 12、不问收获,只问耕耘。如同种树 ,先有 根茎, 再有枝 叶,尔 后花实 ,好好 劳动, 不要想 太多, 那样只 会使人 胆孝懒 惰,因 为不实 践,甚 至不接 触社会 ,难道 你是野 人。(名 言网) 13、不怕,不悔(虽然只有四个字,但 常看常 新。 14、我在心里默默地为每一个人祝福 。我爱 自己, 我用清 洁与节 制来珍 惜我的 身体, 我用智 慧和知 识充实 我的头 脑。 15、这世上的一切都借希望而完成。 农夫不 会播下 一粒玉 米,如 果他不 曾希望 它长成 种籽; 单身汉 不会娶 妻,如 果他不 曾希望 有小孩 ;商人 或手艺 人不会 工作, 如果他 不曾希 望因此 而有收 益。-- 马钉路 德。
45、自己的饭量自己知道。——苏联
自动控制原理第六章

Lc ()
90°
60°
c ()
30°
m
0°
1
m
2
如采用运算放大器进展补偿,那么无源超
前校正网络的传递函数如下
Gc(s)TTss11
假设采用如图6-08所示的有源超前校正
网络,那么其传递函数为
Gc(s)U Uo i((ss))-KcT s s1 1
KcR2R 1R3
RR 22RR 33R4C
T R 4 C T
通常,被控对象是的,而执行器和检测 反响那么根据被控对象的特点、控制要求以 及经济性、可靠性等选定的,这些设备可与 被控对象组合成控制系统的固有局部。
一般情况下,控制系统固有局部的性能 指标是很差的,必须引入附加装置对固有局 部进展改造,才能使控制系统全面满足静态 和动态性能要求。
这些为保证控制系统到达预期的性能指标 要求而有目的引入的附加装置称为控制系统 的校正装置,如图6-05所示。
第二节
常用校正装置及其特性
R(s)
E(s)
B(s)
G1(s)
C(s) G2(s)
H(s)
如果按增益来分,校正装置可分为无源校 正装置和有源校正装置两类,无源校正装置 的放大系数均小于 1 ,而有源校正装置的放 大系数可任意设置。
如果按相角频率特性来分,校正装置可分 为超前校正装置、滞后校正装置和滞后—超 前校正装置三种。
G c(j)j jT T 11
无源超前校正网络的波德图即对数频率特 性如图6-08所示。
00
-10 -20log 0dB/dec
-20
0dB/dec
20dB/dec -10log
Lc ()
90°
60°
c ()
自动控制原理_第6章共121页文档

2019/11/30
比例—积分调节器主要用于在基本保证闭环系统 稳定性的前提下改善系统的稳态性能。
2019/11/30
EXIT
第6章第23页
2019/11/30
EXIT
第6章第24页
6.2.4比例、积分、微分控制
1.时域方程: m (t)K pe(t)K T ip 0 te(t)d tK pdd de(tt)
具有微分控制作用的控制器称为微分控制器,其传递函数为
Gc(s)=ds
输入偏差与输出控制信号的关系为
m(t)
d
d dt
e(t)
微分规律作用下输出信号与输入偏差的变化率成正比,因此,微分 调节器能够根据偏差的变化趋势去产生相应的控制作用。从频率法的角度 分析可知,由于微分环节具有高通滤波作用,微分调节器只在偏差的变化 过程中才起作用,当偏差恒定或变化缓慢时将失去作用,调节器无输出。 所以单一的微分调节器绝对不能单独使用,必须与其他基本控制规律组合。 微分校正常常是用来提高系统的动态性能,但对稳态精度不起作用。同时, 微分调节器有放大输入端高频干扰信号的缺点。
G2(s) C(s)
(a)
2019/11/30
(b)
EXIT
第6章第12页
6.1.3 频率法校正 (重点)
为图解法,在伯德图上校正居多 增加新环节以改变频率特性曲线形状,使之具有合适的低、 中、高频段,以获得满意的动、静态性能。 ① 分析法:选择一种校正装置,再分析是否满足要求→再 选择→再分析。 ② 期望法(串联校正): 确定期望频率特性-已有频率特性=校正装置频率特性 只适用于最小相位系统,但有时难以物理实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
esr
1 Kv
加大Kp, 可以减小系统的稳态误差,提高系统的控制精度; Kp、KD选择适当,能兼顾系统稳态和暂态两方面的性能要求
三、比例-积分(PI)控制
PI调节器
R(s)
Kp
+
ω2 n G 0 (s) s(s 2ζω n )
M (s)
G0 (s)
C (s)
KI G c (s) K p s
2 2 s2 2n s KDn s K pn 0
2 K D n s 1 2 0 2 s 2n s K p n
2 n ( K p K D s)
KD=0
j
n K P
KD
←KD
n
K D s 1 2 2 s 2n s K p n
0
e(t )
0
误差
de(t ) dt 0
微分
C (t )
校正后的C (t )响应
0
t
PD调节器
2 n G ( s) Gc ( s)G0 ( s) ( K p K D s) s( s 2 n )
R(s)
E (s)
Kp
M (s)
KDs
+
G0 ( s )
C ( s) 2 2 2 R(s) s (2 n K Dn ) s K p n
L( ) / dB
0dB
1
c arctg() arctg()
相位滞后校正特点:
1. 具有低通滤波特性,使系 统高频响应的增益衰减,
m
1
c
20 lg 1
积分效应 1 -20
( )
0
m
45 90
c
☆低通滤波器对低频信号具 有较强的放大能力,从而可 以降低系统的稳态误差;
6.1 线性系统校正的概念
1、系统校正
R(s)
Gc ( s )
G( s )
C ( s)
H (s)
被控对象确定后,根据要求的控制目标,对 控制器进行设计的过程叫作系统校正。
2、控制目标——性能指标
1)时域指标:超调量Mp、调整时间t
s、峰值时间tp、
上升时间tr等
2)频域指标:
① 开环:剪切频率ωc、相角裕度及增益裕度Kg或GM
R1
Gc ( s )
R2
Z2 C (s) R ( s ) Z1 Z 2
R (s)
C (s)
C
Z1 R1
s 1 Gc ( s ) s 1
式中:=R2C
R1 R2 1 R2
1 Z 2 R2 Cs
滞后程度系数
频率特性: G ( j ) j 1 c j 1
实际系统要建立精确的模型往往很困难。而PID控制器对模型 要求不高,甚至在模型未知的情况下,也能进行调节。
2.调节方便 控制作用相互独立,最后以求和的形式出现的,人们可改 变其中的某一种调节规律,大大地增加了使用的灵活性。P、I 提高系统稳态性能;D改善系统动态性能
3.适应范围较广 一般校正装置,系统参数改变,调节效果差,而PID控制器 的适应范围广,在一定的变化区间中,仍有很好的调节效果。
2 n
0
以KD为变量的根轨迹如下图:
KD=0
2
1
1> 2
KD=0
j
n K P
采用PD控制,随着KD的加大,系统的 根轨迹将向负实轴的左方移动,保证系 统的暂态性能。
KD
←KD
n
0
KD=0
2 n G ( s) Gc ( s)G0 ( s) ( K p K D s) s( s 2 n ) 2 n K v lim sG( s) lim s( K p K D s) Kp n s 0 s 0 s( s 2 n ) 2
②闭环:谐振峰值Mr、谐振频率ωr及带宽ωb
3、为什么校正?
闭环系统有自动控制功能,在一定范围内可以通过 调节增益K改变系统性能,但有时不能满足要求
4、用什么校正? 校正装置——为了改善系统性能,引入的附加 装置叫作校正装置; 校正装置可以是电气的、机械的、气动的、液 压的或其他形式的元件组成; 电气的校正装置分为有源的和无源的两种,应 用无源校正装置时,要考虑负载效应。
1
1
( )
0
m
45 90
c
( )
1 m t an 2 如果0<希望的要 ,ωc0> 希望的ωc ,可以采用滞 后校正。
( )
相角为负
☆ 值越大,高频段衰减的能 力越强,抑制噪声的能力愈强; 通常选=10, 太大,不容 易实现
2. 最大相位滞后角m发生在ωm处
L( ) / dB
0dB
1
c arctg() arctg()
m
1
1
c
1 20lg
d c 0 m d
第六章
自动控制线性系统的校正
6.1 线性系统校正的概念 6.2 线性系统的基本控制规律 6.3 常用校正装置及其特性 6.4 校正装置设计的方法和依据 6.5 频率法串联校正的设计 串联相位超前校正(分析) 串联相位滞后校正(分析) 串联相位滞后—超前校正(综合) 6.6 反馈校正和复合校正
M (s) K p E(s) K D sE(s)
de(t ) M (t ) K p e(t ) K D dt
C (t )
de(t ) M (t ) K p e(t ) K D dt 原系统输出响应
微分控制是一种 “预 t 见” 型的控制。它测 出 e(t) 的瞬时变化率, 作为一个有效早期修正 信号,在超调量出现前 会产生一种校正作用。 t 如果系统的偏差信 号变化缓慢或是常数, t 偏差的导数就很小或者 为零,这时微分控制也 就失去了意义。
6.2 线性系统的基本控制规律
一、比例(P)控制器
R(s) +
Kp
s ( s 2 n )
2 n
比例P(Proportional)、积分I(Integral)、微分D(Derivative) 2 1
Kp=0 ×
1> 2
∞ Kp
C(s)
jω jω [s]
× Kp=0
2 n G ( s) Gc ( s)G0 ( s) K p s( s 2 n ) 2 n K v lim sG( s) lim sK p Kp n s 0 s 0 s( s 2 n ) 2
5.增益补偿
∵ <1,造成对开环增益的衰减,L(ω)=20lg,为了使系统串联 超前校正装置后,开环增益不变,低频L(ω)=0dB,这时应附加一 个放大系数1/ 的放大器来补偿。进行补偿后的超前校正装置传 函为 1 1 s 1 s 1
' Gc ( s)
Gc (s)
-ωn
s2 -2ωn
Kp ∞
s1 σ
esr
1 Kv
加大Kp, 可以减小系统的稳态误差,提高系统的 控制精度; 加大Kp, 使减小,增大系统的超调量,降低了系 统的平稳性和相对稳定性
较难兼顾系统稳态和暂态两方面的性能要求
二、比例-微分(PD)控制
R(s)
PD调节器
E (s)
Kp
M (s)
2 n G ( s) Gc ( s)G0 ( s) ( K p K D s) s( s 2 n )
KDs
+
G0 ( s )
式中:Kp——比例系数; KD——微分系数 PD调节器的引入,相当于给原系统的开环传递函数增加了 一个 s=-Kp / KD 的零点
Gc (s) K p K Ds
10 lg 1
s 1 s 1
增益补偿后的幅值特性如下图所示:
L( ) / dB
1
1
ωm
1
1
20 lg
系统的抗干扰能力下降 了— 高频段抬高了。
+20 1
0dB
+20 1
10 lg
20 lg
2.相位滞后校正装置
具有相位滞后特性(即相频特性()<0)的校正装置叫滞 后校正装置(又称之为积分校正装置)。
)
不难看出,引入PID调节器后,系统的型号数增加了Ⅰ, 还提供了两个实数零点。因此,对提高系统的稳态性能和动态 特性方面有更大的优越性。
KI M (s) Gc (s) Kp KDs E (s) s
PID(比例—积分—微分)控制器在工业控制中得到广泛地应用。 它有如下特点:
1.对系统的模型要求低
R2
C ( s)
1 1 1 Z1 1 /(Cs) R1
(a)
R1 1 /(Cs) R1 Z1 R1 1 /(Cs) R1Cs 1
Z 2 R2
s 1 Gc ( s ) s 1
R1C
R2 1 R1 R2
为低频衰减率
6.3
常用校正装置及其特性
无源和有源校正装置 本节介绍它们的电路形式、传递函数、对 数频率特性。
一、 无源校正装置
1.相位超前校正装置:具有相位超前特性(即相频特性>0)的校 正装置叫相位超前校正装置(又称为“微分校正装置”)。
C
传递函数为: Gc ( s)
R1
R(s)
Z2 C (s) R ( s ) Z1 Z 2