stm32串口中断总结要点
关于STM32串口空闲中断IDEL的问题

关于STM32串口空闲中断IDEL的问题1.空闲中断是接受数据后出现一个byte 的高电平(空闲)状态,就会触发空闲中断.并不是空闲就会一直中断,准确的说应该是上升沿(停止位)后一个byte,如果一直是低电平是不会触发空闲中断的(会触发break 中断)。
2.关于第二点有要铺垫的三个情况,datasheet 中”当一空闲帧被检测到时,其处理步骤和接收到普通数据帧一样,但如果IDLEIE 位被设置将产生一个中断”“空闲符号被视为完全由'1'组成的一个完整的数据帧,后面跟着包含了数据的下一帧的开始位'1'的位数也包括了停止位的位数”空闲符号的配图后面跟这一个低电平.有人理解为只有收到下一个数据的起始位才会触发中断,这样理解是不对的,应该是数据后有空闲了一帧就会触发.3.清中断的方式感觉奇怪,使用函数USART_ClearITPendingBit( USART1,USART_IT_IDLE )清除不了中断的.我用的是3.5 的库,查看函数说明,里面的@param 参数并没有IDLE,后面的@note 中,这样说:”PE(Parity error),FE(Framingerror),NE(Noise error),ORE(OverRun error) and IDLE(Idle line detected) pendingbits are cleared by software sequence: a read operation to USART_SR register(USART_GetITStatus()) followed by a read operation to USART_DR register(USART_ReceiveData()).”我是通过语句”USART1->DR;”来清除IDLE 中断的.现在有很多数据处理都要用到不定长数据,而单片机串口的RXNE 中断一次只能接收一个字节的数据,没有缓冲区,无法接收一帧多个数据,现提供两种利用串口IDLE 空闲中断的方式接收一帧数据,方法如下:方法1:实现思路:采用STM32F103 的串口1,并配置成空闲中断IDLE 模式且使能DMA 接收,并同时设置接收缓冲区和初始化DMA。
stm32cubemx 串口中断和回调函数运行机制
stm32cubemx 串口中断和回调函数运行机制在STM32CubeMX 中配置串口中断和回调函数的运行机制涉及到STM32 微控制器的中断系统和HAL 库的使用。
下面是一个简要的概述:1. 配置串口硬件:首先,在STM32CubeMX 中,你需要配置串口硬件,选择串口的引脚、波特率等参数。
在配置过程中,你还可以选择是否启用串口的中断。
2. 生成代码:完成硬件配置后,通过STM32CubeMX 生成初始化代码。
这将生成包含初始化串口的HAL 库函数调用的 C 代码文件。
3. 中断配置:如果启用了串口中断,STM32CubeMX 将生成相应的中断处理函数的框架,但并不会直接实现中断处理的代码。
在生成的代码中,你会看到像`USARTx_IRQHandler` 这样的中断处理函数,其中`x` 是你所配置的串口号。
你需要在这个函数中实现具体的中断处理逻辑。
4. HAL_UART_IRQHandler 函数:在中断处理函数中,通常会调用HAL 库的相应函数,如`HAL_UART_IRQHandler`。
这个函数实际上是一个通用的串口中断处理函数,它会检查串口中断的原因并调用相应的回调函数。
5. 回调函数:在HAL 库中,你可以注册一个回调函数,该函数将在串口中断发生时被调用。
回调函数的注册通常在初始化串口时完成,使用的函数是`HAL_UART_Receive_IT` 或`HAL_UART_Transmit_IT`。
这两个函数中的`_IT` 表示启用中断。
以下是一个伪代码示例,演示了串口中断和回调函数的配置:```c// 串口接收缓冲区uint8_t rxBuffer[BufferSize];// 串口中断回调函数void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {// 处理接收完成中断// 处理完后重新启动接收HAL_UART_Receive_IT(&huart1, rxBuffer, BufferSize);}int main() {// STM32CubeMX 生成的初始化代码// 启动串口接收中断HAL_UART_Receive_IT(&huart1, rxBuffer, BufferSize);while (1) {// 主循环}}```在这个例子中,`HAL_UART_RxCpltCallback` 函数是串口接收完成中断的回调函数。
关于STM32的串口溢出中断

关于STM32的串口溢出中断
之前遇到奇怪的问题:
串口中断处理函数中加了溢出中断处理:
if(USART_GetITStatus(USART1,USART_IT_ORE) != RESET) //产生溢出中断{
Utemp = USART_ReceiveData(USART1); //扔掉接收的数据
USART_ClearITPendingBit(USART1, USART_IT_ORE); //清溢出中断标志位}
参考手册ISR 寄存器:
位3 ORE: 溢出错误
在RXNE=1 的的条件下(也就是上次数据还没有读走),串口接收寄存器又接收好
了一个字节的数据并准备往RDR 寄存器去转移的时候,会由硬件将这个位置1。
由软件向USART_ICR 寄存器的ORECF 位写1,可以清除这个标志。
如果USART_CR1 寄存器中的RXNEIE 位或EIE 位是1,就会产生中断请求。
0: 没有溢出错误
1: 检测到溢出错误
CR1 中的RXNEIE 已经使能,实际溢出发生时keil 中观察ORE 的确被置位为1。
然鹅,,,,,,,,
就算ORE 置位为1,这个if 语句也不通过。
stm32f407串口的中断接收函数
stm32f407串口的中断接收函数在stm32f407单片机中,串口通信是一种常见且重要的通信方式。
通过串口通信,可以方便地与外部设备进行数据交互。
而中断是一种常用的编程技术,可以有效提高系统的响应速度和效率。
因此,使用中断来接收串口数据可以更好地利用系统资源,提高数据接收的实时性和可靠性。
我们需要在stm32f407单片机上配置串口模块。
在配置串口模块时,需要设置波特率、数据位、停止位、校验位等参数。
具体的配置方法可以参考stm32f407单片机的相关文档或开发工具的使用手册。
在配置完串口模块后,我们需要编写中断服务函数来处理串口接收中断。
中断服务函数是一种特殊的函数,它会在中断事件发生时被自动调用。
在stm32f407单片机中,串口接收中断对应的中断向量是USARTx_IRQHandler,其中x表示串口模块的编号。
例如,如果我们使用的是USART1串口模块,那么对应的中断向量就是USART1_IRQHandler。
在中断服务函数中,我们首先需要判断中断事件的来源。
对于串口接收中断,我们可以通过检查状态寄存器的接收标志位来判断是否有数据接收到。
如果接收标志位被置位,说明有数据接收到,我们可以通过读取数据寄存器来获取接收到的数据。
接下来,我们可以根据接收到的数据进行相应的处理。
例如,我们可以将接收到的数据存储到缓冲区中,或者根据接收到的数据进行一些特定的操作。
在处理完数据后,我们可以清除接收标志位,以便下一次接收。
除了处理接收数据外,我们还可以在中断服务函数中进行其他一些操作。
例如,我们可以检查数据的完整性和正确性,对接收到的数据进行校验。
如果数据不符合要求,我们可以进行相应的处理,例如丢弃数据或者发送错误信息。
需要注意的是,在中断服务函数中,我们需要尽量减少耗时操作。
因为中断服务函数需要尽快地完成,以便系统能够尽快地响应其他中断事件。
如果中断服务函数执行的时间过长,可能会导致系统的响应速度下降,甚至影响系统的正常运行。
STM32串口通信学习总结
STM32串口通信学习总结STM32是STMicroelectronics推出的一款32位单片机系列,具有高性能、低功耗、丰富的外设等特点,广泛应用于工业控制、消费电子、汽车电子等领域。
其中,串口通信是单片机中常用的通信方式之一,本文将对STM32串口通信学习进行总结。
1.串口通信原理及基础知识在STM32中,USART(通用同步/异步收发器)是负责串口通信的外设。
USART提供了多种模式的串口通信,包括异步模式(Asynchronous)、同步模式(Synchronous)以及单线模式(Single-wire)等。
2.STM32串口通信配置步骤(1)GPIO配置:首先需要配置串口通信所涉及的GPIO引脚,通常需要配置为复用功能,使其具备USART功能。
(2)USART配置:根据需要选择USART1、USART2、USART3等串口进行配置,设置通信模式、波特率等参数。
在配置时需要注意与外部设备的通信标准和参数保持一致。
(3)中断配置(可选):可以选择中断方式来实现串口数据的收发。
通过配置中断,当接收到数据时会触发中断,从而实现接收数据的功能。
(4)发送数据:通过USART的发送寄存器将数据发送出去,可以通过查询方式或者中断方式进行发送。
(5)接收数据:通过读取USART的接收寄存器,获取接收到的数据。
同样可以通过查询方式或者中断方式进行接收。
3.常见问题及解决方法(1)波特率设置错误:在进行串口通信时,波特率设置错误可能会导致通信失败。
需要根据外设的要求,选择适当的波特率设置,并在STM32中进行配置。
(2)数据丢失:在高速通信或大量数据传输时,由于接收速度跟不上发送速度,可能会导致数据丢失。
可以通过增加接收缓冲区大小、优化接收中断处理等方式来解决该问题。
(3)数据帧错误:在数据传输过程中,可能发生数据位错误、校验错误等问题。
可以通过对USART的配置进行检查,包括校验位、停止位、数据位等的设置是否正确。
STM32串口接收中断溢出问题解决
STM32串口接收中断溢出问题解决在使用一个串口发数据的传感器过程中,发现程序第一次进入串口中断之后不再执行主函数的内容,中断中的内容也不执行。
查询大量资料后发现:串口在接收数据过多时,会出现串口溢出错误,并进入溢出中断(ORE中断)。
接下来是错误产生原因以及解决方法。
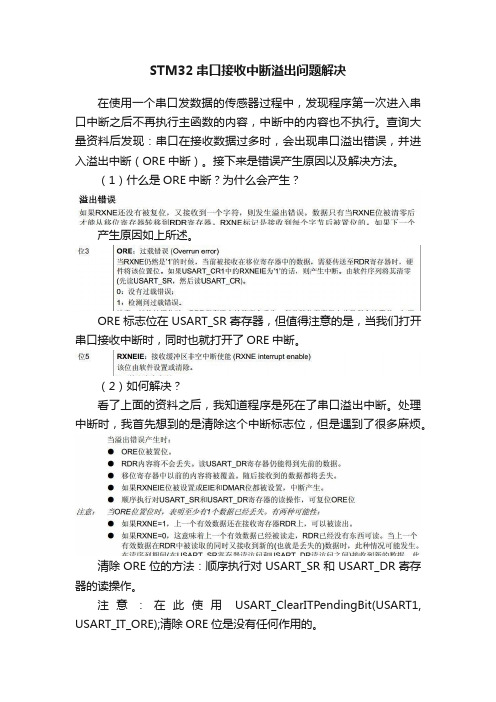
(1)什么是ORE中断?为什么会产生?产生原因如上所述。
ORE标志位在USART_SR寄存器,但值得注意的是,当我们打开串口接收中断时,同时也就打开了ORE中断。
(2)如何解决?看了上面的资料之后,我知道程序是死在了串口溢出中断。
处理中断时,我首先想到的是清除这个中断标志位,但是遇到了很多麻烦。
清除ORE位的方法:顺序执行对USART_SR和USART_DR寄存器的读操作。
注意:在此使用USART_ClearITPendingBit(USART1, USART_IT_ORE);清除ORE位是没有任何作用的。
还有ORE中断只能使用USART_GetFlagStatus(USART1, USART_FLAG_ORE) 读到(没有使能USART_IT_ERR中断时) 这些都是在这个帖子里读到的/love_maomao/article/details/8234039帖子还指出了手册的翻译错误,哈哈,很厉害的博主(在此表白)。
最后附上解决方案:中断服务函数:if(USART_GetFlagStatus(USART2, USART_FLAG_ORE) != RESET){USART_ClearFlag(USART2, USART_FLAG_ORE); //清除溢出中断}if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) {USART_ClearITPendingBit(USART2, USART_IT_RXNE);//rebuf[num++] = USART_ReceiveData(USART2); 读取串口数据}。
STM32 不断进入串口中断问题 解决方法
STM32 不断进入串口中断问题解决方法STM32 有时候会不断进入中断,解决方法如下1.串口初始化配置时,需要打开ORE 溢出中断,如下红色代码所示 [cpp] view plain copy1.void Usart_Init(void)2.{3.4.5. GPIO_InitTypeDef GPIO_InitStructure;6. NVIC_InitTypeDef NVIC_InitStructure;7. USART_InitTypeDef USART_InitStructure;8.9. RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 开启串口时钟10.11. GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_1);12. GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_1);13.14. GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;15. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;16. GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;17. GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;18. GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;19. GPIO_Init(GPIOA,&GPIO_InitStructure);20.21.22.23. USART_ART_BaudRate = 57600; // 配置波特率为11520024. USART_ART_StopBits = USART_WordLength_8b; // 配置数据长度为825. USART_ART_StopBits = USART_StopBits_1; //设置停止位26. USART_ART_Parity = USART_Parity_No; // 配置奇偶校验为NONE27. USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; // 配置硬件流为NONE 28. USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 打开Rx接收和Tx发送功能29.30. USART_Init(USART1,&USART_InitStructure); // 配置31.32.33. USART_Cmd(USART1,ENABLE);34.35. NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; // 选择中断通道36. NVIC_InitStructure.NVIC_IRQChannelPriority = 2; // 抢断优先137. NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断38.39. NVIC_Init(&NVIC_InitStructure);40.41.<span style="color:#ff0000;"> USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 打开中断42. USART_ITConfig(USART1, USART_IT_ORE, ENABLE);</span> // 打开中断43.44.45.}2.在中断中,检测溢出中断并作处理,代码如下所示[cpp] view plain copy1.void USART1_IRQHandler(void)2.{3. u8 dat;4.5.<span style="color:#ff0000;"> if (USART_GetITStatus(USART1, USART_IT_ORE) == SET)6. {7. USART_ClearITPendingBit(USART1,USART_IT_ORE);8. USART_ReceiveData( USART1 );9.10. }</span>11.if( USART_GetITStatus(USART1,USART_IT_RXNE) != RESET ) // 等价于if( !RI ) 检查串口数据是否已就位12. {13. USART_ClearITPendingBit(USART1,USART_IT_RXNE);14. dat = USART_ReceiveData( USART1 );15. uart_rec_buf[uart_len++]=dat;16. RX_TIM=UART_INIT_TIM;17.18. }19.20.}这样就可以解决,串口不断进入中断的问题。
STM32串口之空闲中断

STM32串⼝之空闲中断NBiot模块⼀般都是串⼝接⼝,使⽤AT指令集,对接中国移动onenet平台。
先⽤串⼝助⼿去测试,流程测试OK之后需要在MCU上重新写⼀遍。
STM32串⼝ IDLE中断IDLE其实是空闲的意思。
IDLE中断叫空闲中断,不叫帧中断。
那么什么叫空闲,怎么定义空闲呢?在实际发送数据的时候,⽐如⼀串字符串,我们会采⽤如下⽅式发送void uart1_putc(char dat){SBUF = dat;while (!TI);TI = 0;}void uart1_puts_n(char *str){while (*str)uart1_putc(*str++);}void uart1_puts_n("i am handsome");其实发送的两个字符之间间隔⾮常短,所以在两个字符之间不叫空闲。
空闲的定义是总线上在⼀个字节的时间内没有再接收到数据,空闲中断是检测到有数据被接收后,总线上在⼀个字节的时间内没有再接收到数据的时候发⽣的。
⽽总线在什么情况时,会有⼀个字节时间内没有接收到数据呢?⼀般就只有⼀个数据帧发送完成的情况,所以串⼝的空闲中断也叫帧中断。
要怎么开启帧中断呢?其实其他串⼝配置不⽤改变,只需要在开启串⼝接收中断的时候加上⼀句话就Ok。
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串⼝接收中断USART_ITConfig(USART2, USART_IT_IDLE, ENABLE);//开启串⼝空闲中断然后中断函数如下void USART2_IRQHandler(void){ //串⼝1中断服务程序int clear;if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){ //字符接收中断(接收到的数据必须是0x0d 0x0a结尾)USART2_RX_BUF[length++] = USART2->DR & 0x0FF;}else if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){//空闲帧中断if(USART2_RX_BUF[length - 1] == 0xff){clear = USART2->DR;clear = USART2->SR;length = clear;length = 0;USART2_RX_STA = 1;}else{;}}}在普通中断的时候仅仅保存数据,在帧中断的时候需要执⾏相应处理函数。
STM32-实现串口中断接收和发送数据

STM32-实现串⼝中断接收和发送数据⼀、⼯具 1、硬件:STM32L053R8单⽚机(HAL库) 2、编译环境:Atollic TrueSTUDIO for STM32 9.3.0 3、辅助⼯具:STM32CubeMX⼆、单⽚机系统时钟配置 1、系统时钟配置(没有显⽰的默认),这⾥选择的是内部的⾼速时钟(HSI)作为时钟源,系统时钟频率配置到24MHz。
三、串⼝配置 1、选⽤的是串⼝1,模式是异步通讯,波特率为38400,数据位长度为8,⽆校验位,⼀个停⽌位,接收和发送都打开,其它默认。
2、使能串⼝中断四、⽣成⼯程并进⾏完善 1、⼯程⽣成设置 2、完善代码 在配置完串⼝后,要以中断的⽅式接收数据,后⾯新增的接收⼀个字节数据函数主要是为了打开串⼝中断并等待有数据发来,剩下的字节由中断的回调函数控制接收。
/*** @brief USART1 Initialization Function* @param None* @retval None*/static void MX_USART1_UART_Init(void){/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 38400 ;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 */HAL_UART_Receive_IT(&huart1, &r_data, 1);/* USER CODE END USART1_Init 2 */} 当有数据发来,会响应中断接收数据,接收完后会关闭中断然后调⽤⼀个回调函数,如果想接收多个数据,就需要在回调函数中重新开启接收中断,回调函数的内容可以由⽤户⾃⼰添加(该函数名为固定写法不能随意更改)。
stm32串口中断接收的长度计算

stm32串口中断接收的长度计算
在STM32中,串口接收数据时,可以通过中断来实现数据的接收。
在串口中断接收数据时,需要计算接收到的数据的长度,一般
可以通过以下几种方法来实现:
1. 使用缓冲区计数,在串口中断服务程序中,每当接收到一个
数据时,可以将数据存储到一个缓冲区中,并且使用一个变量来记
录已经接收到的数据的长度。
这样可以通过计算缓冲区中的数据长
度来得到接收到的数据的长度。
2. 使用帧头帧尾,如果串口通信的数据是按照帧格式进行传输的,那么可以在接收数据时,通过检测帧头和帧尾来计算接收到的
数据的长度。
当接收到帧头时开始计数,当接收到帧尾时结束计数,这样得到的长度就是接收到的数据的长度。
3. 使用超时计数,在串口中断服务程序中,可以设置一个超时
计数器,当开始接收数据时,启动计数器,当一定时间内没有接收
到数据时,停止计数器,并将计数值作为接收到的数据的长度。
总的来说,串口中断接收数据的长度计算可以根据具体的应用
场景来选择合适的方法,一般需要根据实际情况进行调试和优化。
希望以上信息能对你有所帮助。
stm32中断学习总结
stm32中断学习总结经过了两天,终于差不多能看懂32的中断了,由于是⽤的库函数操作的,所以有些内部知识并没有求甚解,只是理解知道是这样的。
但对于要做简单开发的我来说这些已经够了。
我学习喜欢从⼀个例程来看,下⾯的程序是我粘贴但是改编的,⼤部分都做了注释。
其实主要步骤就是:1、将GPIO⼝配置成中断输⼊模式。
void Init_LED(void){GPIO_InitTypeDef GPIO_InitStructure; //定义⼀个GPIO结构体变量RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE |RCC_APB2Periph_GPIOG, ENABLE);//使能各个端⼝时钟,GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; //板上LED编号 D2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOG, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //板上LED编号 D5GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOD, &GPIO_InitStructure);}2、这个例程是做的按键,就是你要哪个地⽅产⽣中断,然后将其所在的总线配置成中断源,然后照猫画虎,填写中断结构体成员,就是配置外部事件的模式、触发条件、使能外部触发,但是别忘了打开复⽤功能(现在我还不理解)void Init_TI_KEY(void){EXTI_InitTypeDef EXTI_InitStructure; //定义⼀个EXTI结构体变量RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能IO复⽤功能,使⽤中断功能重要/* 引脚选择 */GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource13);//配置端⼝C的13引脚为中断源重要!!板上标号INT2GPIO_EXTILineConfig(GPIO_PortSourceGPIOE, GPIO_PinSource0); //配置端⼝E的0引脚为中断源重要!!板上标号INT1/* 设置外部中断结构体的成员*/EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断模式为中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line13;EXTI_InitStructure.EXTI_LineCmd = ENABLE; //使能中断线EXTI_Init(&EXTI_InitStructure); //根据参数初始化中断寄存器}3、现在就该配置中断了。
关于STM32串口空闲中断的问题

关于STM32串⼝空闲中断的问题1.空闲中断是接受数据后出现⼀个byte的⾼电平(空闲)状态,就会触发空闲中断.并不是空闲就会⼀直中断,准确的说应该是上升沿(停⽌位)后⼀个byte,如果⼀直是低电平是不会触发空闲中断的(会触发break中断)。
2.关于第⼆点有要铺垫的三个情况,datasheet中"当⼀空闲帧被检测到时,其处理步骤和接收到普通数据帧⼀样,但如果IDLEIE位被设置将产⽣⼀个中断""空闲符号被视为完全由'1'组成的⼀个完整的数据帧,后⾯跟着包含了数据的下⼀帧的开始位'1'的位数也包括了停⽌位的位数” 空闲符号的配图后⾯跟这⼀个低电平.有⼈理解为只有收到下⼀个数据的起始位才会触发中断,这样理解是不对的,应该是数据后有空闲了⼀帧就会触发.3.清中断的⽅式感觉奇怪,使⽤函数USART_ClearITPendingBit( USART1, USART_IT_IDLE )清除不了中断的.我⽤的是3.5的库,查看函数说明,⾥⾯的@param参数并没有IDLE,后⾯的@note中,这样说:"PE(Parity error),FE(Framing error),NE(Noise error),ORE(OverRun error) and IDLE(Idle line detected) pending bits are cleared by software sequence: a read operation to USART_SR register (USART_GetITStatus()) followed by a read operation to USART_DR register (USART_ReceiveData())."我是通过语句"USART1->DR;"来清除IDLE中断的.。
stm32串口中断原理

stm32串口中断原理
STM32串口中断是指在串口收发数据时,通过中断方式进行
数据的处理和传输。
在STM32单片机中,串口通信是通过UART或USART模块实现的。
UART(Universal Asynchronous Receiver/Transmitter)是一种
通用异步收发器,主要用于串行通信。
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)是一个更加
通用且功能更强大的串行通信接口,可同时支持异步和同步通信。
在STM32中,串口通信一般使用USART模块。
通过配置USART的寄存器,设置波特率、数据位、停止位、校验位等
参数。
然后,通过使能USART接收中断和发送中断,可以实
现接收和发送数据时的中断处理。
当有新的数据要发送时,CPU会将数据写入USART的发送缓冲区,并启动发送操作。
当发送操作完成后,USART会触发
发送完成中断,通知CPU可以继续发送下一个数据。
当收到新的数据时,USART会将数据存入接收缓冲区,并触
发接收完成中断,通知CPU可以读取接收到的数据。
在中断服务函数中,我们可以根据需要处理发送和接收的数据。
比如,可以通过发送中断函数来发送下一个数据,或者在接收中断函数中进行数据的处理和分析。
总的来说,STM32串口中断通过配置USART的相关寄存器和使能中断,实现了在数据收发过程中的中断处理。
这种方式可以提高效率和可靠性,使程序可以及时响应串口数据的变化。
stm32f4串口中断写法

stm32f4串口中断写法今天咱们来聊一聊stm32f4的串口中断写法呀。
想象一下,stm32f4就像是一个超级智能的小机器人,它可以做很多很多有趣的事情呢。
串口就像是这个小机器人的嘴巴和耳朵,它可以通过这个“嘴巴和耳朵”和其他的设备聊天哦。
而中断呢,就像是这个小机器人突然听到了很重要的事情,然后马上放下手里正在做的其他小事情,先去处理这个重要的事情。
那怎么让这个小机器人学会在串口有事情发生的时候马上做出反应呢?这就需要我们来写一写串口中断的程序啦。
比如说,我们可以把这个过程想象成在学校里。
你正在教室里安安静静地做数学作业呢,这就好比stm32f4在做其他的正常任务。
突然,老师叫你的名字,这就像是串口有了新的消息,也就是发生了中断。
你就得停下手里的数学作业,先去听老师说话,这就是中断处理。
我们先得让这个小机器人知道串口在哪里呀。
就像你在学校里要先知道老师的办公室在哪里一样。
我们要在程序里告诉stm32f4哪个是串口,就像告诉它这是和外面交流的通道。
然后呢,我们要设置这个串口的一些基本的东西。
比如说,就像你要和朋友写信,你得先确定用什么信纸,字写多大。
对于串口来说,我们要确定它的波特率,这就像是写信的时候字的大小和疏密程度呢。
如果波特率设置错了,就好像你朋友看你的信的时候,字要么太大太稀疏,要么太小太密集,根本看不清楚你写的啥。
接着,我们要让这个小机器人知道怎么去处理串口的中断。
这就好比你要告诉自己,当老师在课堂上叫你的名字的时候,你要站起来,有礼貌地听老师讲话。
在程序里,我们要写好当串口有新消息来了,这个小机器人要做什么。
比如说,它可能是把收到的消息显示在一个小屏幕上,就像你把老师说的重要事情记在小本子上一样。
我给你们举个具体的小例子吧。
假如我们要让stm32f4接收从电脑发过来的数字,然后把这个数字加1再发回电脑。
我们先设置好串口,让它能正常接收和发送消息。
当电脑发过来一个数字,比如说3,这时候串口就像一个小邮递员一样把这个消息送到了stm32f4这个小机器人那里。
STM32串口接收流程-串口接收中断

STM32串⼝接收流程-串⼝接收中断串⼝接收串⼝接收流程1. 编程USARTx_CR1的M位来定义字长。
2. 编程USARTx_CR2的STOP位来定义停⽌位位数。
3. 编程USARTx_BRR寄存器确定波特率。
4. 使能USARTx_CR1的UE位使能USARTx。
5. 如果进⾏多缓冲通信,配置USARTx_CR3的DMA使能(DMAT)。
6. 使能USARTx_CR1的RE位为1使能接收器。
7. 如果要使能接收中断(接收到数据后产⽣中断),使能USARTx_CR1的RXNEIE位为1。
当串⼝接收到数据时1. USARTx_SR(ISR)的RXNE位置1。
表明移位寄存器内容已经传输到RDR(DR)寄存器。
已经接收到数据并且等待读取。
2. 如果开启了接收数据中断(USARTx_CR1寄存器的RXNEIE位为1),则会产⽣中断。
(程序上会执⾏中断服务函数)3. 如果开启了其他中断(帧错误等),相应标志位会置1。
4. 读取USARTx_RDR(DR)寄存器的值,该操作会⾃动将RXNE位清零,等待下次接收后置位。
串⼝接收流程(HAL库)配置过程:接收配置步骤①~⑥和发送流程⼀样,调⽤HAL_UART_Init函数HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart);步骤⑦开启接收中断:HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef*huart, uint8_t *pData, uint16_t Size);接收数据过程:步骤①获取状态标志位通过标识符实现:__HAL_UART_GET_FLAG //判断状态标志位__HAL_UART_GET_IT_SOURCE //判断中断标志位步骤②~③中断服务函数:void USARTx_IRQHandler(void) ;//(x=1~3,6)void UARTx_IRQHandler(void) ;//(x=4,5,7,8)在启动⽂件startup_stm32fxxx.s中查找。
stm32hal库串口空闲中断波特率不对程序失效

stm32hal库串口空闲中断波特率不对程序失效标题:深度探讨STM32HAL库串口空闲中断波特率不对程序失效问题解决思路在STM32微控制器编程中,串口通信是非常常见的功能之一。
然而,有时候我们会遇到串口空闲中断波特率不对导致程序失效的问题。
在本文中,我们将深入探讨这一问题的解决思路,并分享个人观点和理解。
一、问题背景1.1 STM32HAL库在开始探讨问题之前,让我们先简要介绍一下STM32HAL库。
STM32HAL库是针对STM32系列微控制器的一种中级软件库,提供了一系列的高级API接口,方便开发者进行各种外设的配置和使用。
1.2 串口空闲中断在串口通信中,空闲中断是非常重要的。
当数据发送完成后,会产生一个空闲中断,表示当前数据帧发送完毕。
然而,如果波特率设置不正确,就会导致串口空闲中断无法正常触发,从而影响程序的正常运行。
1.3 波特率不对程序失效波特率是指每秒钟传输的比特数,在串口通信中必须严格匹配。
如果波特率设置不正确,就会导致接收端无法正确解析数据,从而引发程序失效的问题。
二、解决思路2.1 确认波特率设置我们需要确认在使用串口通信时,波特率的设置是否正确。
可以通过查看数据手册或者相关的配置文件来确认波特率的设定值。
2.2 检查时钟配置我们需要检查时钟配置是否正确。
时钟配置的不匹配也会导致波特率不对的问题,因此需要仔细检查时钟配置的相关参数。
2.3 使用适当的工具进行调试在确认波特率设置和时钟配置之后,我们可以使用适当的工具进行调试,例如逻辑分析仪、串口调试助手等,来观察串口通信的波形和数据是否符合预期。
2.4 更新HAL库版本如果以上方法都未能解决问题,我们可以尝试更新STM32HAL库的版本。
有时候,旧版本的库可能存在一些已知的问题,通过更新到最新版本来解决问题的可能性也是存在的。
三、个人观点和理解在解决串口空闲中断波特率不对程序失效的问题时,我认为首先要对文档资料进行仔细阅读和理解,确认相关的配置参数;其次要善用调试工具,通过观察波形和数据来定位问题;最后要及时关注官方的更新和修复信息,及时更新库版本以解决问题。
分析初始化STM32串口后进入发送完成中断的现象

分析初始化STM32串口后进入发送完成中断的现象最近在调试STM32 串口过程中发现一个奇怪的问题,初始化串口1 口,使能串口发送完成中断后,立刻就进入了发送完成中断,21ic 论坛上也有同样的问题讨论,而香水版主并没有解释原因。
为了彻底的搞明白产生这一现象的原因:我仔细的看了STM32 手册中的串口部分的介绍:以下是字符发送的配置过程,注意第6 点,在设置USART_CR1 中的TE 位时,会发送一个空闲帧作为第一次数据发送,所以即便你执行了USART_ClearFlag(USART1,USART_FLAG_TC); (这个函数肯定在空闲帧数据发送完成前执行),所以当空闲帧发送完后,就进入发送完成中断。
配置步骤:1.通过在USART_CR1 寄存器上置位UE 位来激活USART2.编程USART_CR1 的M 位来定义字长。
3.在USART_CR2 中编程停止位的位数。
4.如果采用多缓冲器通信,配置USART_CR3 中的DMA 使能位(DMAT)。
按多缓冲器通信中的描述配置DMA寄存器。
5.利用USART_BRR 寄存器选择要求的波特率。
6.设置USART_CR1中的TE 位,发送一个空闲帧作为第一次数据发送。
7.把要发送的数据写进USART_DR 寄存器(此动作清除TXE 位)。
在只有一个缓冲器的情况下,对每个待发送的数据重复步骤7。
8.在USART_DR 寄存器中写入最后一个数据字后,要等待TC=1,它表示最后一个数据帧的传输结束。
当需要关闭USART 或需要进入停机模式之前,需要确认传输结束,避免破坏最后一次传输。
解决的办法:方法一在执行USART_ITConfig(USART1, USART_IT_TC, ENABLE); 之前,先延时一段时间,基本上比一个字符发送的时间长一点就可以了,然后再执行USART_ClearFlag(USART1, USART_FLAG_TC);方法二:在执行USART_ITConfig(USART1, USART_IT_TC, ENABLE); 之前,USART_ClearFlag(USART1,。
STM32 串口中断处理方法
调试发现是串口中断硬件 BUG:
1. USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);使能了接收中断,那么 ORE 中断也同 时被开启了。
2. ORE 中断只能使用 USART_GetFlagStatus(USART1, USART_FLAG_ORE) 读到(没有使 能 USART_IT_ERR 中断时) 解决办法:
4.找资料 STM32F10x 微控制器参考手册(2009 年 12 月第 10 版)P541 发现如下说明:
也就是说只要接收中断打开,即 RXNEIE 设置为 1,那么 ORE 中断也自动打开了。 可是 USART_GetITStatus(USART1, USART_IT_ORE )== RESET!!!! 找到 USART_GetITStatus(USART1, USART_IT_RXNE)函数,发现只有当 USART_IT_ERR 中断使 能时,才能读到 ORE 中断。 在这里要指出这个 BUG:产生 ORE 中断了,但使用 USART_GetITStatus()函数却无法读到这个中断被 SET 起来!
}
2.为什么会一直跑到接收中断? 断点之后发现(USART_GetITStatus(USART1, USART_IT_RXNE)==RESET 的,也就是说没有数据 接收到也进了中断,而且在 USART 配置中我也只打开了接收中断!没有数据送过来应该是不可能进入中断 的!
3.响应了什么中断? 我想通过函数(USART_GetITStatus()把所有中断状态都读出来,但失败了,USART_IT_XXX 所有中断 状态都是 RESET!也就是说没有中断也进入到这个中断服务程序来了!?
(三)stm32之串口通信DMA传输完成中断
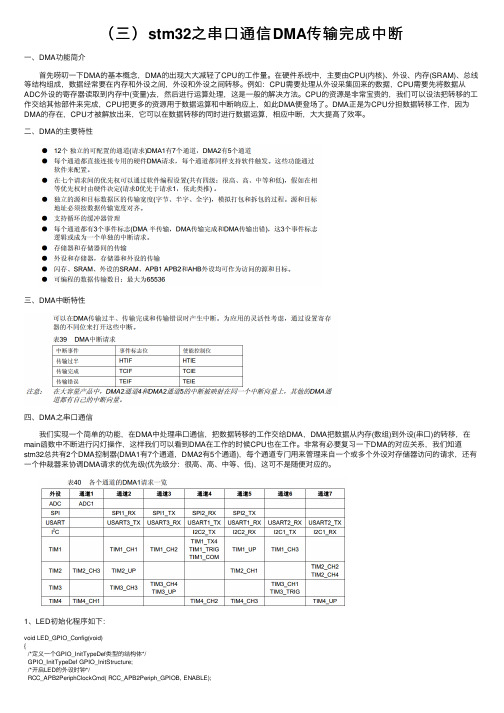
(三)stm32之串⼝通信DMA传输完成中断⼀、DMA功能简介 ⾸先唠叨⼀下DMA的基本概念,DMA的出现⼤⼤减轻了CPU的⼯作量。
在硬件系统中,主要由CPU(内核)、外设、内存(SRAM)、总线等结构组成,数据经常要在内存和外设之间,外设和外设之间转移。
例如:CPU需要处理从外设采集回来的数据,CPU需要先将数据从ADC外设的寄存器读取到内存中(变量)去,然后进⾏运算处理,这是⼀般的解决⽅法。
CPU的资源是⾮常宝贵的,我们可以设法把转移的⼯作交给其他部件来完成,CPU把更多的资源⽤于数据运算和中断响应上,如此DMA便登场了。
DMA正是为CPU分担数据转移⼯作,因为DMA的存在,CPU才被解放出来,它可以在数据转移的同时进⾏数据运算,相应中断,⼤⼤提⾼了效率。
⼆、DMA的主要特性三、DMA中断特性四、DMA之串⼝通信 我们实现⼀个简单的功能,在DMA中处理串⼝通信,把数据转移的⼯作交给DMA,DMA把数据从内存(数组)到外设(串⼝)的转移,在main函数中不断进⾏闪灯操作,这样我们可以看到DMA在⼯作的时候CPU也在⼯作。
⾮常有必要复习⼀下DMA的对应关系,我们知道stm32总共有2个DMA控制器(DMA1有7个通道,DMA2有5个通道),每个通道专门⽤来管理来⾃⼀个或多个外设对存储器访问的请求,还有⼀个仲裁器来协调DMA请求的优先级(优先级分:很⾼、⾼、中等、低),这可不是随便对应的。
1、LED初始化程序如下:void LED_GPIO_Config(void){/*定义⼀个GPIO_InitTypeDef类型的结构体*/GPIO_InitTypeDef GPIO_InitStructure;/*开启LED的外设时钟*/RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE);/*选择要控制的GPIOB引脚*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;/*设置引脚模式为通⽤推挽输出*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;/*设置引脚速率为50MHz */GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;/*调⽤库函数,初始化GPIOB0*/GPIO_Init(GPIOB, &GPIO_InitStructure);/* 关闭所有led灯 */GPIO_SetBits(GPIOB, GPIO_Pin_14);} 这个地⽅地⽅没什么要注意的,唯⼀要注意的就是输⼊输出模式,我们按需求这样配就好了。
STM32中断法USART串口简单使用

STM32中断法USART串口简单使用
1.初始化USART外设:首先需要在STM32的寄存器中对USART进行初始化。
具体的步骤包括:选择时钟源、配置波特率、设置数据长度、设置停止位、设置校验位等。
这些设置都可以在USART的控制寄存器中进行。
2.配置串口引脚:需要将USART的引脚与STM32的GPIO引脚进行连接。
具体的配置方法包括将GPIO引脚设置为复用功能,并且选择对应的USART信号。
3.编写中断服务函数:为了使用中断方式接收和发送数据,需要编写中断服务函数。
中断服务函数通常由硬件自动调用,当USART接收到数据或发送数据完成时触发。
在中断服务函数中,我们可以读取接收到的数据或者发送下一个数据。
4.使能中断:要使能USART的串口接收中断,需要在USART的控制寄存器中设置相应的位。
通常有RXNE和TC中断位,分别表示接收缓冲区非空和发送完成。
5.启动USART:启动USART外设,使其处于工作状态。
可以在相应的控制寄存器中设置TE(发送使能)和RE(接收使能)位。
6.外部中断配置:在STM32中,需要在NVIC寄存器中配置和使能USART接收中断的优先级。
这样才能通过中断向量表触发中断。
通过上述步骤,可以完成USART串口的简单使用,实现数据的接收和发送。
在编写中断服务函数时,可以根据实际需求进行数据处理,例如打印接收的数据或根据接收到的数据触发其他功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文以USART1为例,叙述串口中断的编程过程。
1、先来讲述一下在应用串口中断时涉及到的一些库文件。
首先对于STM32外设库文件的应用编程,misc.c和stm32f10x_rcc.c是肯定要添加到。
接下来就是我们要用到的相关外设了。
毫无疑问,串口文件stm32f10x_usart.c是必须的。
串口通信是对通用GPIO端口引脚的功能复用,所以还需要stm32f10x_gpio.c文件。
另外,
因为有中断的产生,所以中断文件stm32f10x_it.c也是必要的,当然这个文件一般和main.c
放在一个文件夹下(一般习惯为User文件夹),因为我们的中断响应函数是要在里面自己编写
的。
当然还有其他的基本必须文件如系统配置文件等在这地方就不说了,这个是创建一个工
程应该知道的。
2、初始化
对于串口通信的初始化,不仅仅只是对串口的初始化(这个地方是比较烦人的,不像别的芯
片那样简洁明了)。
首先时钟使能配置。
STM32内部的时钟有很多,感兴趣的自己看看参考手册。
此处
以USART1为例说明。
有USART1时钟、GPIOA时钟、GPIO复用(AFIO)时钟。
由于
此处USART1和GPIOA、AFIO均在APB2上,所以可以一次配置完成。
如下:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO|RCC_APB 2Periph_USART1 ,ENABLE);
其次中断配置。
主要有优先级组设定、USART1中断使能、该中断的优先级,中断初
始化。
程序如下:
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);//选择分组方式0
/* 使能 USART1中断 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
然后GPIO复用功能配置。
一般情况下我们使用原始的外设和GPIO端口引脚的映射
关系,如果要改变其映射的话,请另外查看参考手册上关于GPIO重映射部分。
对
于GPIO的复用,其引脚的输入与输出模式都有要求,在参考手册上有详细说明。
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 配置 USART1 Rx 作为浮空输入 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(USARTy_GPIO, &GPIO_InitStructure);
/* 配置 USART1 Tx 作为推挽输出 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;。