船舶预测数学建模-模型
船舶横摇运动,模型

船舶的横摇运动的数学模型为:e e e Dh N J Dh N J J αααφφφφφφφφ++∆=++∆+ 22)(1)求μ:若干模型试验资料表明,在线性范围内,无舭龙骨的船05.0~035.0=μ;有舭龙骨的船07.0~055.0=μ。
本次建模中取06.0=μ。
(2)求h :船舶初稳性高B h )05.0~04.0(=,规范要求集装箱船h 应大于0.3m ,其他船型可取小些,但也需大于0.15m 。
故:m h 72.01804.0=⨯=,满足规范要求。
(3)有效波倾φK 和重心高度g Z :根据若干客船资料表明,对于船型一般且重心位置适中的船舶,在谐摇附近的规则波中有效波倾系数可近似表示为: d Z K g 60.013.0+=φ式中:g Z 为由基线算起的重心高度;d 为船舶的吃水。
由于这个公式简单且具有一定的准确性,我国海船稳性规范中对一般民用船舶,在计算有效波倾时采用了这个公式。
为了使φK 不过分小又不能大于1,规范中对d Z g 加了附加的条件,即d Z g 的比值超过1.45时取1.45,小于0.917时取0.917. 所以,d Z g 取1,则有m d Z g 61=⨯=,73.060.013.060.013.0=+=+=d Z K gφ 惯性矩xx I :由杜埃尔公式:()g xx z B d D I 22412+= 将D ,B ,g Z 的值代入上式得:()())(10358.264188.91210926.54122722622s m kg z B d D I g xx ⋅⋅⨯=⨯+⨯⨯=+= 无因次衰减系数μ是表征横摇性能的重要参数,μ越大,自由横摇衰减越快,规则波中的频率响应函数就越小,特别对谐摇区的影响最为显著。
根据μ的定义可知: Dh I N xx =μ由上式可知:667106.072.010926.510358.206.0⨯=⨯⨯⨯⨯==Dh I N xx μ 式(2.21)可转化为: )()()(2)(2s s I Dh s s I N s s xxxx δφφφ=++ 令: ωξ22=xxI N 2ω=xxI Dh 则上式化为:)()()(2)(22s s s s s s δφωωξφφ=++进而得:2222)()(ωξωωδφ++=s s s s 将N 和xx I 的值代入式(2-32)、(2-33)得:⎪⎪⎩⎪⎪⎨⎧⨯⨯⨯=⨯⨯⨯=7627610358.272.010926.510358.2106.022ωωξ 解方程得⎩⎨⎧==43.006.0ωξ 综上所述,推导出“长征号”客货船在设计航速为17kn 时的横摇运动数学模型: 18.00516.018.0)()(2++=s s s s δφ。
船舶结构优化设计的数值模拟

船舶结构优化设计的数值模拟在船舶工程领域,船舶结构的优化设计至关重要。
它不仅关系到船舶的安全性、可靠性,还直接影响到船舶的性能、经济性以及运营成本。
随着计算机技术的飞速发展,数值模拟已经成为船舶结构优化设计中不可或缺的工具。
数值模拟是一种基于数学模型和计算方法,对物理现象和过程进行仿真的技术。
在船舶结构优化设计中,数值模拟可以帮助工程师在设计阶段就对船舶结构的力学性能、流体性能等进行预测和分析,从而避免了传统设计方法中需要反复制造样机、进行试验所带来的时间和成本的浪费。
船舶结构优化设计的目标通常是在满足各种约束条件的前提下,如强度、刚度、稳定性、振动特性等,使船舶结构的重量最轻、成本最低或者性能最优。
为了实现这些目标,需要对船舶结构的几何形状、材料分布、连接方式等进行优化。
在数值模拟中,首先需要建立船舶结构的数学模型。
这包括对船舶结构进行离散化,将其划分成有限个单元,并确定每个单元的力学特性和边界条件。
常见的有限元方法就是一种广泛应用于船舶结构数值模拟的技术。
通过将船舶结构离散成大量的小单元,可以较为准确地模拟其复杂的力学行为。
对于船舶的强度分析,数值模拟可以计算出在各种载荷工况下,船舶结构内部的应力分布和变形情况。
例如,在静水压力、波浪载荷、货物载荷等作用下,通过模拟可以确定结构中的薄弱部位,从而为结构的加强和改进提供依据。
在船舶的流体性能分析方面,数值模拟可以模拟船舶在水中的流动情况,计算出阻力、升力、流场分布等参数。
这对于优化船舶的外形,提高航行性能具有重要意义。
例如,通过模拟不同船型的流场,可以找到阻力最小的船型设计方案。
除了强度和流体性能,船舶结构的振动特性也是优化设计的重要方面。
数值模拟可以分析船舶结构的固有频率和振型,避免在实际运行中发生共振现象,保证船舶的舒适性和设备的正常工作。
然而,船舶结构优化设计的数值模拟并非一帆风顺。
在实际应用中,存在着诸多挑战和困难。
首先是计算精度和计算效率的平衡问题。
紧迫危险下船舶避撞过程多目标距离预测数学建模

Abstract: In order to solve the accidents such as ship collision, the research and development of accurate multi-target distance and avoidance technology for ships under the urgent danger situation has become the key research content of the long-term and stable development of shipping industry in various countries. Because the accuracy of the traditional ship collision avoidance system for short range multi-target ship prediction is still insufficient, so the ship collision avoidance system under the existing urgent danger is studied deeply. combining with the existing safety distance model algorithm, the ship collision avoidance distance prediction model is designed, the overall scheme of the ship collision avoidance control system is designed, and the ship collision avoidance system is designed according to the requirements of the functional module of the system, so as to control the speed and safety of the ship. So as to reduce that probability of collision of ship and avoid the loss of life and property of personnel. In order to verify the practical value and accuracy of the method, a simulation experiment was carried out. the experimental results show that the multi-objective distance prediction mathematical model of ship collision avoidance process under imminent danger can accurately avoid multi-objective ships in the process of ship navigation in a timely and effective manner, thus proving that the method has important reference significance.
现代船舶设计的建模与计算技术研究

现代船舶设计的建模与计算技术研究引言:船舶设计建模与计算技术研究是船舶工程领域的重要研究方向之一、随着计算机技术的发展,船舶设计过程中使用的建模与计算技术也在不断演进。
本文将从几个方面介绍现代船舶设计的建模与计算技术研究的方法和应用。
一、船舶设计建模技术1.参数化设计技术参数化设计技术是指通过建立参数模型,通过改变参数的数值来实现不同方案的设计。
这种技术可以大大提高设计效率和灵活性。
船舶设计中,常用的参数包括船体长度、宽度、吃水深度、船体适航性等。
通过改变这些参数的数值,可以得到不同类型和性能的船舶设计方案。
2.数字化建模技术数字化建模技术是指通过数学方法和计算机技术将物理对象转换为数学模型的过程。
在船舶设计中,常用的数字化建模技术包括三维模型、曲面建模和有限元分析等。
通过这些技术,设计师可以更好地理解和分析船体的结构和性能。
3.相关性分析技术相关性分析技术是指通过量化分析不同设计参数之间的关系,找出对船舶性能最为敏感的设计参数。
常用的相关性分析方法包括回归分析、灵敏度分析和优化方法等。
这些方法可以帮助设计师在设计过程中更加准确地预测和优化船舶的性能。
二、船舶设计计算技术1.流体力学计算技术流体力学计算技术是指通过数学模型和计算机算法模拟船舶在水中的运动和流体力学特性。
常用的流体力学计算方法包括湍流模拟、颗粒流动模拟和多相流动模拟等。
通过这些方法,设计师可以准确地计算船舶的阻力、推进力和船体的稳性等性能参数。
2.结构力学计算技术结构力学计算技术是指通过数学模型和计算机算法模拟船舶结构的应力、变形和疲劳性能。
常用的结构力学计算方法包括有限元方法、边界元方法和离散元方法等。
通过这些方法,设计师可以评估船舶结构的强度和稳定性,并进行结构优化。
3.增材制造技术增材制造技术是指通过逐层堆叠材料构建船舶模型的制造方法。
常用的增材制造技术包括3D打印、激光熔化和电子束熔化等。
通过这些技术,设计师可以快速制造船舶模型,并进行性能测试和验证。
舰艇追击问题数学建模
舰艇追击问题数学建模导言:在海上,当一艘舰艇发现目标之后,就必须采取必要的措施来对其进行追击。
然而在追击过程中,舰艇与目标之间往往需要考虑很多因素,如距离、航速、转向等等。
因此,如何进行科学的数学建模,以便更好地解决舰艇追击问题,成为了值得我们思考的问题。
一、航行路线建模在进行舰艇追击时,我们首先需要将两艘船之间的距离建模,并且需要对两船的航行路线进行建模。
对于一个一直航行的目标,我们可以将其航向和航速作为常数,通过莫卡托投影的方法将其建模,而对于一条航行路线不固定的目标,我们可以通过卡尔曼滤波器对其进行建模。
卡尔曼滤波器是利用线性系统的状态来对不确定的情况进行估计的方法,它可以通过船的动态观测值来预测船的下一步行动,并根据预测的结果进行调整。
二、船舶速度建模在建立了航行路线的基础上,我们需要对船舶的速度进行建模。
船舶速度受到许多因素的影响,如风速、涡流、水流等等。
因此,我们可以通过船舶动力学原理,对船舶的速度、加速度、减速度等进行建模,进而计算出船舶在不同环境条件下的最佳航速。
三、转向建模在追击目标的过程中,船舶的转向非常关键。
在进行转向时,一般需要考虑到目标的位置、距离、航向、自身的速度等因素。
在建模时,我们可以通过克鲁姆贝格-最优控制理论来求解最佳控制策略,选择一种最佳的转向方式,以便能够以最快的速度追上目标。
四、寻找最佳路径在追击目标的过程中,选择最佳路线也是很重要的。
在选择航行路线时,我们需要考虑目标的位置、船舶的速度等因素,并进行最小化路径长度、时间等的优化。
在建模时,我们可以通过动态规划、遗传算法等方法,寻找最佳航行路径和速度,使得船舶能够以最快的速度追上目标。
五、总结舰艇追击问题是一个非常重要的问题,需要我们采用科学的数学建模方法才能更好地解决。
建立航行路线模型、船舶速度模型、转向模型和寻找最佳路径模型等,可以通过数学模型预测出舰艇的行动轨迹,实现快速追击目标,提高舰艇追击目标的成功率。
基于神经网络模型的船舶轨迹预测研究

基于神经网络模型的船舶轨迹预测研究在海运业中,船舶轨迹预测是一项重要的技术,它可以帮助港口调度员、船舶运营商以及货运代理商等人员更好地规划和组织船运任务。
而基于神经网络模型的船舶轨迹预测技术,可以有效提高预测精度和准确性,帮助航运企业更好地利用航行数据制定航行计划和优化航线。
本文将从船舶轨迹预测的需求背景、神经网络模型原理及其在船舶轨迹预测中的应用方法等方面进行探讨。
一、船舶轨迹预测的需求背景在海事治理与管理中,船舶跟踪和轨迹预测是非常重要的任务。
过去,船舶轨迹预测主要依赖传统的基于经验和规则的分析方法,这种方法的局限性很明显,缺乏针对性和精准性。
因此,随着人工智能和机器学习技术的提升,越来越多的船运企业开始使用基于神经网络模型的船舶轨迹预测技术,以提高预测精度和准确性,优化船舶运营和管理等方面,为船运企业带来更多的竞争优势。
二、神经网络模型原理及其在船舶轨迹预测中的应用方法神经网络是一种模拟人脑神经系统工作原理的数学模型,它通过学习过程来识别和处理信息,广泛应用于图像识别、语音识别、机器翻译、自然语言处理等领域。
在船舶轨迹预测中,神经网络模型的核心思想是通过训练已有的历史轨迹数据,建立一种具有预测能力的数学模型,从而实现对未来航行轨迹的预测模拟。
基于神经网络模型的船舶轨迹预测方法可以分为以下三个步骤:1.数据采集和预处理:获取船舶的历史轨迹数据,包括时间、位置、速度、航向等信息,并对数据进行清洗、滤波、转化处理,以保证数据的质量和可用性。
2.神经网络模型的构建:选择合适的神经网络结构和参数,使用历史数据进行训练,拟合出模型的参数。
常用的神经网络模型有BP(Back-Propagation)网络、RNN(Recurrent Neural Network)网络、LSTM(Long Short-Term Memory)网络等。
3.船舶轨迹预测和优化调整:使用训练好的神经网络模型,输入未来的航行条件和选定的航线,输出船舶未来航行的轨迹预测结果,并根据实际情况进行优化调整。
船舶水上纵向运动的非线性数学模型构建

收稿日期: 2018 – 12 – 02 作者简介: 关砚蓬 (1986 – ),男,硕士,讲师,主要从事计算数学领域研究。
·2·
舰船科学技术
第 41 卷
顺ห้องสมุดไป่ตู้变化的样本,通过对船舶水上纵向运动数据之间 的时间关系构建船舶水上纵向运动预测模型,但是本 质上仍然属于线性建模技术,因此船舶水上纵向运动 预测精度提高有限 。 [4-6]
GUAN Yan-peng (Zhengzhou Institute of Technology, Zhengzhou 450044, China)
Abstract: In order to solve the problem of prediction accuracy of ship's longitudinal motion on water, a method of constructing a non-linear mathematical model of ship's longitudinal motion on water is designed. Firstly, the shortcomings of the current linear mathematical model of ship's longitudinal motion on water are analyzed. Then, the non-linear modeling method-neural network is introduced to fit the variation characteristics of ship's longitudinal motion on water, and the non-linear prediction model of ship's longitudinal motion on water is established. Finally, the simulation experiments are compared with the linear modeling method of ship's longitudinal motion on water. The results show that the method proposed in this paper is effective. The prediction accuracy of ship longitudinal motion on water is high, and the prediction error of ship longitudinal motion on water is less than that of linear ship longitudinal motion on water. The validity and superiority of the non-linear ship longitudinal motion modeling method in this paper are verified.
不同潮流时段船舶靠泊作业风险贝叶斯决策模型

不同潮流时段船舶靠泊作业风险贝叶斯决策模型不同潮流时段船舶靠泊作业风险贝叶斯决策模型是一种用于评估船舶靠泊作业风险的统计模型。
本文将详细介绍该模型的基本原理和应用。
船舶靠泊作业是指船舶在码头、港口等地停靠并进行装卸货物、补充燃料和维修保养等活动。
由于潮汐的影响,船舶的靠泊作业在不同的潮汐时段可能面临不同的风险。
准确评估不同潮流时段的靠泊作业风险对于保障船舶安全和提高作业效率非常重要。
贝叶斯决策模型是一种基于贝叶斯定理的数学模型,可以根据已有的信息和先验知识,对未知事件进行推断和预测。
在船舶靠泊作业风险评估中,我们可以使用贝叶斯决策模型来预测不同潮流时段的风险水平,并根据预测结果制定相应的决策。
贝叶斯决策模型的基本原理是将未知的参数(即不同潮流时段的风险水平)视为随机变量,并利用先验分布和观测数据来更新参数的概率分布。
具体而言,在船舶靠泊作业风险评估中,我们可以定义一个参数θ表示不同潮流时段的风险水平,假设θ服从某个先验分布,然后利用观测数据来更新θ的概率分布,从而得到不同潮流时段的风险水平的后验概率分布。
具体实施该模型时,首先需要确定潮流时段的风险评估指标。
常用的指标包括船舶靠泊作业的能见度、浪高、风速等。
然后,我们可以利用历史数据和专家知识来构建先验分布。
可以使用过去一段时间内不同潮流时段的风险数据来估计先验分布的参数,或者利用专家提供的主观判断来构建先验分布。
接下来,我们需要收集实际观测数据,并利用观测数据更新参数的概率分布。
当有新的观测数据时,我们可以使用贝叶斯公式将先验分布与观测数据相结合,得到参数的后验概率分布。
具体而言,贝叶斯公式可以表示为:P(θ|X) = P(X|θ) * P(θ) / P(X)P(θ|X)表示参数θ的后验概率分布,P(X|θ)表示观测数据X在给定参数θ下的概率,P(θ)表示参数θ的先验概率分布,P(X)表示观测数据X的概率。
在船舶靠泊作业风险评估中,观测数据X即为不同潮流时段的风险评估指标的实际观测值。
船舶航行行为分类预测模型

船舶航行行为分类预测模型船舶作为海上运输的主要工具,目前在全球各个重要港口均得到广泛使用,航线也越来越多样化和复杂化。
在这样的背景下,预测船舶航行行为变得越来越重要,可以帮助船舶避免事故和碰撞,提高海上交通效率,保障安全。
本文将介绍一种基于机器学习的船舶航行行为分类预测模型,并讲解其应用与优势。
一、背景介绍船舶的自主导航行为主要包括:行驶、停泊、锚泊、卸货、装货、转向等。
船舶在不同的航行行为中的行驶特点存在显著的差异。
预测船舶航行行为可帮助海事管理部门和船舶业主更好地了解船舶的行驶状态,提高海运的效益和安全性。
二、方法介绍模型的主要流程:3. 特征选择:根据特征的相关性和重要性,对提取出的特征进行筛选,选择具有代表性和区分度的特征;4. 训练模型:将特征向量输入到分类器中进行训练,得到训练好的模型;5. 测试模型:使用测试集对训练好的模型进行测试,得到模型的准确率和性能;三、应用场景本模型可以应用于多种船舶航行行为的预测,例如识别船只是否停靠在码头上,是否转弯或掉头等等。
适用于以下情景:1. 船舶交通管制:可以帮助海事部门对船舶的行驶路径和行为进行监控和管理,减少交通事故发生的风险和交通堵塞的情况;2. 货运物流监管:可以帮助企业对货物运输的安全进行监管,保证货物的安全性和时效性;3. 智能航行导航:可以为船舶提供准确的导航和路径规划,优化航行路线,提高海上交通的效率。
四、优势分析本模型采用了机器学习技术,具有以下优势:1. 更高的预测准确率:使用机器学习算法可以有效降低人工判断时的误差率,提高预测准确率;2. 更好的智能化:机器学习算法可以通过不断学习和反馈来不断改进自己的性能,具有更好的智能化特性;3. 更高的应用灵活性:机器学习算法可以应用于多个领域和场景,具有更高的应用灵活性。
五、总结本文介绍了一种基于机器学习的船舶航行行为分类预测模型,以及其应用场景和优势分析。
随着船舶行业的不断发展,预测船舶航行行为将成为船舶领域的一个重要研究方向。
船舶预测数学建模-模型

船舶预测数学建模-模型武汉理工大学第十一届大学生数学建模竞赛承诺书我们仔细阅读了《武汉理工大学第十一届大学生数学建模竞赛的选手须知》。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们的竞赛编号为: C 10我们的选择题号为: B参赛队员:队员1:刘晓辉队员2:刘春华队员3:黎燕燕评阅编号:现代船舶是为交通运输、港口建设、渔业生产和科研勘测等服务的,随着工业的发展,船舶服务面的扩大,船舶也日趋专业化。
不同的部门对船舶有不同的要求,使用权船舶的航行区域、航行状态、推进方式、动力装置、造船材料和用途等到方面也各不同,因而船舶种类繁多,而这些船舶在船型上、构造上、运用性能上和设备上又各有特点。
目前主要分类方式及特点1、船舶的航行区域:船舶按航行区域可分为海洋船反作用、港湾船舶和内河船舶三种。
航行内湖泊上的船舶一般也归入内河船舶类。
2、船舶航行的状态:船舶按航行状态可归纳为浮行、滑行、腾空航行三种。
浮行是指船舶在航行时,船体的重量和排水量相等而瓢浮在水面航行的船舶(又叫做排水量船)。
水下潜航的船舶也属于浮行。
滑行船舶是指高速状态下航行时,船体的大部分被水的动力作用抬起,在水面滑行。
滑行时船的排水量小于静止时的排水量,同时减小了湿表面积,水阻力大大减小,使船的速度加快。
如快艇、水翼艇。
腾空航行船舶是船身在完全脱离水面的状态下航行的。
如气垫船和冲翼艇。
3、推进方式:船舶按进方式可分为原始的撑篙、拉绎、划桨、摇橹等人力推进的船舶和风力推进的帆船;机械推进的明轮船,喷水船、螺旋桨船、以及空气推进船等。
多模型切换船舶预测控制方法研究

多模型切换船舶预测控制方法研究引言:船舶预测控制是船舶自主导航和碰撞避免的重要研究领域。
为了提高船舶的自主控制能力和安全性,多模型切换方法在船舶预测控制中得到了广泛应用。
本文将探讨多模型切换船舶预测控制方法的研究现状、原理和应用。
一、研究现状1. 船舶预测控制方法船舶预测控制方法主要包括模型预测控制、适应控制和强化学习等。
模型预测控制方法基于数学模型对船舶的运动进行预测,并根据预测结果进行控制决策。
适应控制方法通过实时调整控制参数以适应环境变化和船舶运动状态的变化。
强化学习方法则通过与环境进行交互,学习最优的控制策略。
2. 多模型切换方法多模型切换方法将多个模型组合起来,根据不同的环境和船舶运动状态选择合适的模型进行预测和控制。
多模型切换方法可以提高船舶预测控制的鲁棒性和适应性,使得船舶在不同的环境和运动状态下都能保持良好的控制性能。
二、多模型切换船舶预测控制方法原理多模型切换船舶预测控制方法主要包括模型库构建、模型选择和控制策略三个步骤。
1. 模型库构建模型库是多模型切换方法的基础,它包括多个数学模型以及相应的参数。
模型库的构建需要考虑不同的运动状态、环境条件和船舶类型等因素。
通过实验数据和数学建模方法,可以构建出适用于船舶预测控制的多个模型。
2. 模型选择在船舶实际运行中,根据船舶当前的运动状态和环境条件,从模型库中选择合适的模型进行预测和控制。
模型选择可以根据一定的评估准则进行,例如最小二乘法、贝叶斯准则等。
选择合适的模型可以提高船舶预测控制的精度和鲁棒性。
3. 控制策略根据选择的模型进行预测后,需要制定相应的控制策略。
控制策略可以基于模型预测误差和船舶当前状态进行调整,以实现船舶的稳定控制和碰撞避免。
控制策略可以采用PID控制、模糊控制、强化学习等方法。
三、多模型切换船舶预测控制方法应用多模型切换船舶预测控制方法在船舶自主导航和碰撞避免中有广泛的应用。
其应用领域包括船舶自动驾驶、船舶交通管理、船舶碰撞风险评估等。
船舶动态建模与预测技术研究

船舶动态建模与预测技术研究船舶是一个非常重要的交通工具,其中包含着许多机械、电子以及人工控制单元。
船舶的复杂程度使得它的维护和运行变得异常困难,因此需要船舶动态建模与预测技术来对船舶进行监测和控制。
船舶动态建模是一个船舶控制系统的核心部分。
建模过程将船舶的动态特性和系统结构进行分析,并通过用一组数学方程来表示其行为,从而开发出了模拟环境。
建模工作基于对船舶系统的人工观察和测量结果,以保证船舶模型行为的准确性和可靠性。
船舶模型可以用于验证和测试船舶系统、进行设计优化、仿真和控制算法开发,并为船员提供培训和操作支持。
预测技术是船舶控制系统的另一个核心部分。
它提供了一种方法来分析船舶的运行数据,从而提前预测船舶未来的行为,识别潜在的故障和维修需求。
预测技术可以有多种不同的形式,如回归分析、人工神经网络、模糊逻辑等。
在船舶动态建模的基础上,预测技术可以利用传感器采集到的实时数据对船舶的性能进行实时监测,并提高系统稳定性和可靠性。
船舶动态建模与预测技术的应用范围非常广泛。
例如,在船舶自动导航和控制方面,这项技术可以帮助船员改善船舶运行的稳定性、节能、减少航行时间和提高安全性。
在海洋工程方面,这项技术可以帮助设计更加稳定的船舶支架,并在不同海况下进行施工、维护和拆除。
在船舶维护方面,这项技术可以实时监测船舶所需的部件和设备的工作状态,从而更好地进行维护和保养。
尽管船舶动态建模与预测技术的应用前景非常广阔,但是它们仍然面临着一些挑战。
首先,船舶动态行为建模的过程会导致数据量爆炸,并且模型所含变量的数量可以非常庞大,这可能会导致处理和存储问题。
其次,对于传感器数据的统计分析,大多数数据不仅容易受到噪声、采样和数据标准差等因素的干扰,还具有非线性、非平稳和不确定性的特征,这些特征使得数据处理变得更加困难。
最后,尽管机器学习领域在最近几十年取得了巨大的进展,但在实际应用过程中,保证模型的准确性、性能和可靠性依然需要大量的迭代试验和调整。
基于机器学习的船舶速度预测模型研究
基于机器学习的船舶速度预测模型研究随着人类社会的不断发展和进步,交通工具也变得更加便捷和高效。
而船舶作为一种重要的海运交通工具,其性能和安全方面的优化一直是人们关注的焦点。
然而对于船舶的速度预测,很多人都不是十分了解。
基于机器学习的船舶速度预测模型研究,就是为了解决这个问题。
本文旨在探讨这个主题,并对这些方法的发展趋势和应用范围进行阐述。
一、背景介绍船舶运输是连接世界各国的主要方式之一,其航速对于整个海运物流行业至关重要。
而对于某些领域来说,例如海上风力发电领域等,船舶速度的预测就显得尤为重要。
然而,直接通过人工经验进行速度预测,常常存在数据量较大、实时性不足等问题。
为了解决这些问题,传统的船舶速度预测方法通常采用物理模型和数学模型。
物理模型通常建立在海洋动力学和水动力学的知识基础之上,考虑了很多因素,比如船体尺寸、机械参数、环境因素等等。
但是这些模型建立过程中较为繁琐,需要对数据的质量有很高的要求,常常需要运用一些复杂的算法。
而数学模型则更多地关注单一因素对速度的影响。
虽然能够得出一些比较准确的预测结果,但对于复杂的海洋环境下,因素之间的耦合关系很容易被忽略,因此结果并不太准确。
二、基于机器学习的船舶速度预测模型机器学习(Machine Learning)是一种将人工智能应用于数据分析的技术。
其通过从历史数据中学习模式和关联,从而预测未来的数据和趋势。
在船舶速度预测等领域,基于机器学习的模型已经取得了较好的效果。
一般来说,机器学习的模型主要分为两类,监督学习(Supervised Learning)和无监督学习(Unsupervised Learning)。
监督学习是建立了一个输入与输出之间的关系,通过给模型输入已知数据,可以得到对应的输出。
而无监督学习则是不需要任何标签的输入数据。
在船舶速度预测领域,最常见的机器学习模型就是监督学习的回归模型。
回归模型主要是为通过学习已有的船舶运行数据,建立一个船舶速度与各种因素之间的联系。
船舶运动控制系统建模应用
第6章 船舶运动控制系统建模应用6.1 引 言数学模型化(mathematical modelling)是用数学语言(微分方程式)描述实际过程动态特性的方法。
在船舶运动控制领域,建立船舶运动数学模型大体上有两个目的:一个目的是建立船舶操纵模拟器(ship manoeuvring simulator),为研究闭环系统性能提供一个基本的仿真平台;另一个目的是直接为设计船舶运动控制器服务。
船舶运动数学模型主要可分为非线性数学模型和线性数学模型,前者用于船舶操纵模拟器设计和神经网络控制器、模糊控制器等非线性控制器的训练和优化,后者则用于简化的闭环性能仿真研究和线性控制器(PID, LQ, LQG, H ∞鲁棒控制器)的设计。
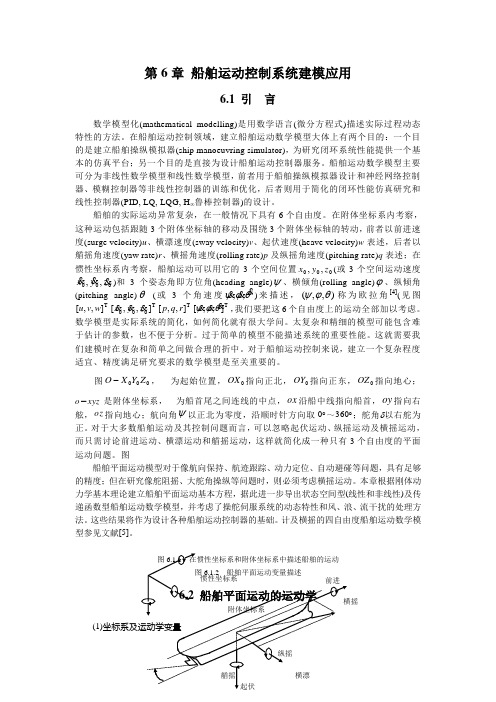
船舶的实际运动异常复杂,在一般情况下具有6个自由度。
在附体坐标系内考察,这种运动包括跟随3个附体坐标轴的移动及围绕3个附体坐标轴的转动,前者以前进速度(surge velocity)u 、横漂速度(sway velocity)v 、起伏速度(heave velocity)w 表述,后者以艏摇角速度(yaw rate)r 、横摇角速度(rolling rate)p 及纵摇角速度(pitching rate)q 表述;在惯性坐标系内考察,船舶运动可以用它的3个空间位置000,,z y x (或3个空间运动速度000,,z y x)和3个姿态角即方位角(heading angle)ψ、横倾角(rolling angle)ϕ、纵倾角(pitching angle)θ (或3个角速度θϕψ,,)来描述,),,(θϕψ称为欧拉角[4](见图T ],,[w v u T 000],,[z y xT ],,[r q p T ],,[θϕψ ,我们要把这6个自由度上的运动全部加以考虑。
数学模型是实际系统的简化,如何简化就有很大学问。
太复杂和精细的模型可能包含难于估计的参数,也不便于分析。
过于简单的模型不能描述系统的重要性能。
基于LSTM的船舶航迹预测模型

基于LSTM的船舶航迹预测模型随着全球贸易和航运的快速发展,船舶航迹预测成为了一个重要的研究课题。
准确预测船舶航迹可以帮助提高航运安全、减少燃油消耗、优化航线规划等。
近年来,深度学习技术的发展为船舶航迹预测提供了新的解决方案。
本文基于长短期记忆网络(LSTM)模型,提出了一种船舶航迹预测模型,并对该模型进行了实验验证。
LSTM是一种适用于序列数据的深度学习模型,具有记忆单元的循环结构,可以有效地捕捉序列数据的长期依赖关系。
在船舶航迹预测领域,LSTM模型具有以下优点:适应序列数据的时序性:船舶航迹数据具有较强的时间关联性,LSTM 模型可以通过捕捉历史数据中的长期依赖关系来预测未来航迹;学习能力:LSTM模型具有自适应学习能力,可以通过训练数据自动提取重要特征;预测精度高:LSTM模型的输出结果具有较高的预测精度,可以有效降低预测误差。
在船舶航迹预测研究中,LSTM模型的应用日益广泛。
如Kumar等(2019)基于LSTM模型对船舶运动轨迹进行了预测,并取得了较好的预测效果。
Arul等(2021)将LSTM模型应用于船舶航线规划,优化了航线设计方案,提高了航运安全。
在船舶航迹预测研究中,数据处理与预处理是建立预测模型的关键步骤之一。
对于船舶航迹数据,首先需要进行数据清洗,包括去除异常值、填补缺失值等。
进行特征提取,包括速度、航向、风速、浪高等多种特征。
这些特征可以从船舶航行状态、环境等多个方面来描述船舶航迹。
采用小波变换等方法对数据进行去噪处理,提高数据的可靠性。
在建立LSTM模型时,首先需要确定模型的参数,包括输入层、隐藏层和输出层的节点数、激活函数等。
本文采用PyTorch深度学习框架来构建LSTM模型,并采用Adam优化算法进行模型训练。
具体步骤如下:确定输入输出数据:将经过预处理的数据作为模型的输入,将船舶航迹作为模型的输出;构建LSTM模型:采用一维LSTM模型来处理时间序列数据,将输入数据按照时间顺序逐个输入到模型中;损失函数:采用均方误差(MSE)作为损失函数,用于衡量模型的预测精度;优化算法:采用Adam优化算法对模型进行训练,通过不断调整参数来降低损失函数的值,提高模型的预测精度。
海洋船舶制造中的数字化建模与仿真
海洋船舶制造中的数字化建模与仿真海洋船舶制造是一个复杂而精密的过程,它涉及到各种船舶类型和规模的设计、制造和运营。
在过去,这一行业主要依赖于人工经验和物理实验来进行设计和测试。
然而,随着科技的不断进步,数字化建模与仿真技术成为了海洋船舶制造中不可或缺的一部分。
数字化建模与仿真是通过计算机技术和数值方法来模拟和预测物理系统的行为和性能。
它可以帮助船舶设计师和制造商更准确地理解和评估设计方案,降低设计错误和成本,提高生产效率和质量。
首先,数字化建模与仿真可以在船舶设计阶段提供有力的支持。
在过去,船舶设计师主要依靠手绘图纸和样机来制定设计方案。
然而,这种方法存在着许多限制,如设计过程繁琐、成本高昂和时间周期长。
而现在,通过数字化建模与仿真技术,设计师可以在计算机上创建船舶的三维模型,并模拟不同条件下的性能和行为。
这可以帮助设计师更好地理解和评估设计方案的可行性,并及时发现和解决问题,为下一步的制造和测试提供参考。
其次,数字化建模与仿真可以加速船舶制造的过程。
在传统的制造方法中,往往需要建造大量的物理原型来进行测试和验证。
这不仅费时费力,而且成本高昂。
而通过数字化建模和仿真技术,制造商可以在计算机上进行虚拟测试和优化,以减少物理实验的次数和时间。
这不仅可以降低制造成本,还可以缩短制造周期,提高生产效率。
另外,数字化建模与仿真也可以提高船舶的性能和安全性。
通过对船舶进行全面的仿真测试,设计师可以评估和优化船舶的结构、船体水动力特性、稳性和操纵性等。
这可以帮助设计师找到性能瓶颈并进行改进,以提高船舶的航行速度、稳定性和燃油效率,同时确保船舶的安全性。
此外,数字化建模与仿真还可以在船舶运营阶段发挥重要作用。
通过对不同运行条件的仿真模拟,船舶的运营人员可以更好地预测和优化船舶的性能和燃油消耗。
他们可以根据模拟数据调整船舶的航行计划、航线和速度,以降低运营成本和环境影响。
然而,数字化建模与仿真仍然面临着一些挑战和限制。
船舶动力学的数值模拟和预测

船舶动力学的数值模拟和预测船舶在海上的运动是由自然现象、机械力和行业因素共同作用的结果。
为了更好地掌握船舶在海上的运动和行为,人们需要了解船舶动力学及其数值模拟和预测的相关知识。
船舶动力学概述船舶动力学是研究船舶在海上运动规律及其力学原理的学科。
它主要研究以下三个方面:1. 船舶力学:即研究船舶运动与船体受力的关系,包括平衡、稳定性和操纵性等。
2. 海洋环境:即研究海水、风力、波浪和海流等自然环境对船舶的影响。
3. 船舶动力学模型:即研究船舶在各种条件下的动力学特性,包括速度、推进力、耗油量等。
数值模拟和预测船舶动力学的数值模拟和预测是基于数学建模和计算机技术的一种模拟和预测方法。
船舶动力学的数值模拟和预测通常包括以下几个方面:1. 流场模拟:研究水流的流场特性,包括流速、流量、压力等。
2. 结构模拟:研究船体结构的承载和变形情况,包括船体的强度、刚度和稳定性等。
3. 推进系统模拟:研究船舶的推进系统特性,包括发动机、变速箱、螺旋桨等。
船舶动力学的数值模拟和预测有很广泛的应用,包括船舶设计、航行计划、航线修正、船舶运行管理等方面。
通过数值模拟和预测,可以更好地预测和掌握船舶在海上的行为和运动,提高航行安全和效率。
数值模拟和预测的方法船舶动力学的数值模拟和预测有多种方法,包括经验公式、物理模型和计算机模拟等。
经验公式:经验公式是根据大量的试验数据和经验总结出来的一种估算方法。
这种方法通常适用于简单的情况,无法对船舶的复杂运动进行准确预测。
物理模型:物理模型是根据物理相似原理,建立一种与真实船舶相似的模型,通过实验研究,推断真实船舶行为。
此种方法能够较真实地模拟船舶的运动规律,但是需要人力、物力和时间等大量投入。
计算机模拟:计算机模拟是将船舶的运动规律建立数学模型,通过计算机程序对船舶运动进行模拟和预测。
此种方法能够较准确地模拟和预测船舶的动力学特性,但是需要专业知识和技术支持。
数值模拟和预测的误差数值模拟和预测的误差是由多种因素造成的,包括数值误差、物理误差和假设误差等。
船舶总量预测报告
船舶总量预测报告一、引言船舶是国际贸易和国民经济发展的重要组成部分,船舶总量的预测对于航运业者、政府决策者以及相关行业分析师具有重要意义。
本报告旨在分析船舶总量的发展趋势,并利用合适的模型对未来船舶总量进行预测。
二、数据收集与分析三、船舶总量预测模型选择为了预测船舶总量,我们需要选择合适的模型。
鉴于船舶总量具有时序性、趋势性和季节性等特点,我们决定采用时间序列分析方法进行预测。
根据数据分析结果,选择了ARIMA模型作为我们的预测模型。
四、船舶总量预测结果通过对过去几年船舶总量数据进行ARIMA模型拟合,我们获得了未来船舶总量的预测结果。
根据模型预测,未来五年内船舶总量有望保持持续增长的趋势。
具体的预测结果如下:第一年:船舶总量预计将增长10%,达到XX艘。
第二年:船舶总量预计将增长8%,达到XX艘。
第三年:船舶总量预计将增长6%,达到XX艘。
第四年:船舶总量预计将增长4%,达到XX艘。
第五年:船舶总量预计将增长2%,达到XX艘。
五、预测结果的可靠性分析为了评估预测结果的可靠性,我们进行了模型的残差分析。
通过观察残差序列的自相关图和偏自相关图,验证了模型的合理性。
同时,我们还采用了交叉验证的方法,将部分数据作为训练集进行模型拟合,再用剩余数据进行验证,结果显示模型的预测效果较好。
六、结论与建议通过本次船舶总量预测报告,我们发现未来五年内船舶总量将保持增长趋势。
这对于船舶行业从业者和相关决策者来说是一个重要的信息。
为了适应船舶总量的增长,相关企业应加强船舶管理、优化运力配置以提高运输效率,同时也需要关注船舶设计和船舶建造质量,以确保高效、安全的运输服务。
此外,政府和行业协会也应制定相应政策和标准,促进航运业的可持续发展,提高船舶总量的发展质量。
同时,应积极推动船舶技术创新与发展,加强与国际航运行业的合作与交流,以提升我国船舶产业的国际竞争力。
总之,船舶总量的预测对于航运业者、政府决策者以及相关行业分析师具有重要意义。
航行问题数学建模

航行问题数学建模一、航线规划在航行问题中,航线规划是至关重要的。
它涉及到船舶的起始位置、目的地、沿途的障碍物和可能遇到的气象条件等因素。
航线规划通常使用地图或电子海图进行,并考虑船舶的尺寸、吃水深度、航速等因素。
数学模型可以用于优化航线,以减少航程、时间和燃料消耗。
二、速度与距离关系速度与距离之间的关系是航行问题的基础。
距离= 速度× 时间。
因此,航速的增加将减少航程所需的时间,但会增加燃料消耗。
数学模型可以用于确定最佳航速,以平衡时间和燃料消耗。
三、风速影响风速对航行有很大的影响。
逆风将减慢船速,而顺风则有助于加速。
数学模型可以用于预测在不同风速条件下的航速和航程。
此外,还需要考虑风向的影响,以确定最佳航线。
四、航行时间预测航行时间预测是航行问题的重要部分。
它涉及到船舶的航速、距离、风速和天气条件等因素。
数学模型可以用于预测航行时间,以帮助船长制定计划和决策。
五、燃料消耗与航程燃料消耗是航行问题中的重要考虑因素。
船长需要了解船舶在不同航速下的燃料消耗情况,以确定最佳航速和航程。
数学模型可以用于预测燃料消耗和航程之间的关系,以帮助船长做出决策。
六、位置与导航位置和导航是航行问题中的关键因素。
船舶需要准确知道自己的位置和目的地位置,以确定最佳航线。
数学模型可以用于计算船舶的位置和方向,以及预测船舶在给定时间和速度条件下的位置。
此外,还需要考虑导航误差和不确定性等因素。
七、船舶稳定性船舶稳定性是航行问题中的重要考虑因素。
它涉及到船舶的浮态、稳性和操纵性等方面。
数学模型可以用于分析船舶在不同条件下的稳定性,以帮助船长制定安全可靠的航行计划。
八、避碰规则建模在航行中,避碰规则是至关重要的,因为它们可以防止碰撞和事故的发生。
避碰规则可以通过数学模型进行建模和实施,以确保船舶之间的安全距离和行驶路线。
这些规则通常包括避让规则、碰撞危险判断等,并根据不同的环境和条件进行调整和优化。
船舶规划与调度问题的数学建模与求解

船舶规划与调度问题的数学建模与求解一、引言船舶规划与调度问题一直以来都是航运业面临的重要挑战之一。
船舶规划与调度的优化,可以大大提高船舶运输效率和运营管理水平,降低成本,提高利润。
数学建模与求解方法在船舶规划与调度中发挥着重要作用。
本文将重点介绍船舶规划与调度问题的数学建模与求解方法。
二、问题描述船舶规划与调度问题可以分为船舶路径规划和船舶调度两个方面。
船舶路径规划是指在给定的航线网络中确定船舶的最优路径,使得航程最短、成本最低、时间最早,同时满足一定的约束条件。
船舶调度是指在给定的船舶和港口资源情况下,合理安排船舶到达、停靠、出发和停泊等活动,以最大限度地提高资源利用率。
三、数学建模1. 船舶路径规划的数学建模船舶路径规划的目标是使得船舶的航程最短。
为了实现最短航程,可以采用图论中的最短路径算法,如Dijkstra算法、Bellman-Ford算法和A*算法等。
在该数学建模过程中,需要将船舶的航线网络抽象为一个图,图中的节点表示港口,边表示港口之间的航线。
根据输入的起点和终点,利用最短路径算法求解最优路径。
2. 船舶调度的数学建模船舶调度的目标是合理安排船舶活动,以最大限度地提高资源利用率。
船舶调度可以用图论中的匹配问题来建模和求解。
在该数学建模过程中,需要将船舶和港口资源抽象为图中的节点,同时考虑船舶与港口之间的关系抽象为图中的边。
通过求解最大匹配问题,可得到一个合理的船舶调度方案。
四、求解方法1. 船舶路径规划的求解方法在船舶路径规划中,可以采用启发式算法和元启发式算法等求解方法。
启发式算法主要通过启发式规则对问题进行逼近求解,并通过搜索算法来寻找最优解。
常见的启发式算法有遗传算法、模拟退火算法和粒子群算法等。
元启发式算法是一种综合多种启发式算法的求解方法,通过多种启发式算法的组合来得到更优的解决方案。
2. 船舶调度的求解方法在船舶调度中,可以采用数学规划方法和模拟仿真方法等求解方法。
数学规划方法主要通过线性规划、整数规划和混合整数规划等方法来求解船舶调度问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
武汉理工大学第十一届大学生数学建模竞赛承诺书我们仔细阅读了《武汉理工大学第十一届大学生数学建模竞赛的选手须知》。
我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们的竞赛编号为: C 10我们的选择题号为: B参赛队员:队员1:刘晓辉队员2:刘春华队员3:黎燕燕评阅编号:中国船舶行业未来趋势发展预测摘要:本文建立了本文建立了关于中国船舶预测的数学模型,通过对船舶简单分类,并分析每类船舶的特点,进而分析了国际船舶市场需求的结构性变化、国际船舶市场需求、国内船舶企业造船业务比例等影响因素;采用了线性拟合和统计分析方法,运用回归方程对误差做了最小化、最优化处理;用改良模型对中国船舶业未来三年的发展做出了预测;并在最后给出了对有关部门建议的文章。
关键词:差方分析、线性拟合、统计回归、误差消除模型、结构变化。
中国船舶行业未来趋势发展预测一.问题重述中国船舶行业未来趋势发展预测2008年由于国际金融危机导致的航运业不景气,国内船舶企业相对过剩的产能使得产销率达到近几年的最低点。
从中国船舶行业的产销率看,近几年来也一直是下降的趋势。
中国船舶工业协会表示,2011年以来,国际船舶市场需求出现结构性变化,大型集装箱船、LNG(液化天然气船)及海洋工程装备等高附加值产品主导国际船舶市场,但上述高附加值产品订单基本为韩国、新加坡造船集团所垄断,国内船舶企业承接新订单难度增大。
今年以来约有半数以上的造船企业尚未获得新的订单合同,个别造船企业出现船台空置,无船可造的局面。
1、建立数学模型,为船舶进行适当分类,并简单分析每类船舶的特点;2、建立数学模型,利用互联网数据,预测未来三年中国造船业发展趋势;3、写一篇近年中国船舶行业发展的情况分析和对有关部门建议的文章。
二.船舶分类的模型及特点现代船舶是为交通运输、港口建设、渔业生产和科研勘测等服务的,随着工业的发展,船舶服务面的扩大,船舶也日趋专业化。
不同的部门对船舶有不同的要求,使用权船舶的航行区域、航行状态、推进方式、动力装置、造船材料和用途等到方面也各不同,因而船舶种类繁多,而这些船舶在船型上、构造上、运用性能上和设备上又各有特点。
目前主要分类方式及特点1、船舶的航行区域:船舶按航行区域可分为海洋船反作用、港湾船舶和内河船舶三种。
航行内湖泊上的船舶一般也归入内河船舶类。
2、船舶航行的状态:船舶按航行状态可归纳为浮行、滑行、腾空航行三种。
浮行是指船舶在航行时,船体的重量和排水量相等而瓢浮在水面航行的船舶(又叫做排水量船)。
水下潜航的船舶也属于浮行。
滑行船舶是指高速状态下航行时,船体的大部分被水的动力作用抬起,在水面滑行。
滑行时船的排水量小于静止时的排水量,同时减小了湿表面积,水阻力大大减小,使船的速度加快。
如快艇、水翼艇。
腾空航行船舶是船身在完全脱离水面的状态下航行的。
如气垫船和冲翼艇。
3、推进方式:船舶按进方式可分为原始的撑篙、拉绎、划桨、摇橹等人力推进的船舶和风力推进的帆船;机械推进的明轮船,喷水船、螺旋桨船、以及空气推进船等。
明轮是船舶以机器作为动力以来,最古老的一种推进器。
以后又出现把推进哭装在船的艉部水面以下部分的螺旋桨推进器,后来,对少数殊要求的船舶有的在艉部螺旋桨上加上导管,也有在艏部加装辅助的螺旋桨。
大多数船舶螺旋桨的叶片是固定的,对经常驻要求改变工况的船,采用可调螺距的螺旋桨。
浅水航道中的船舶还有喷水推进的。
全浮式气垫船和腾空艇上则用空气螺旋桨推进。
4、动力装置:船舶按动力装置的种类可分为蒸汽机船、内燃机船,。
电力推进船和核动力装置船。
早期使用的蒸汽往复机目前已被淘汰。
汽轮机(有蒸汽轮机和燃汽轮机)在一些高速客船和军舰上使用。
现在各类船舶应用最广的是柴油机动力装置。
小艇上也有用汽油机作1为动力的。
电动推进船是以内燃机或蒸汽机驱动发电机(或直接用蓄电池)发电,再带动与螺旋桨联成一体的电动机来推进船舶。
这种动力装置的螺旋桨转速可任意调节,且操作简单、操纵方便,为有特殊要求的船舶采用,如潜艇、破冰船厂、科学考察船、火车渡船等。
核动力装置是当前世界上较先进的动力装置,它以核反应堆通过原子核的反应,产生蒸汽热能来驱动汽轮机运转。
用途场合分类及特点民用船舶的分类:运输船——客船、客货船、货船(杂货船、散货船、集装箱船、滚装船、载驳船、油船、液化气体船、冷藏船等)、渡船、驳船等。
工程船——挖泥船、起重船、浮船坞、救捞船、布设船(布缆船、敷管船等)、打桩船。
渔业船——网类渔船(拖网渔船、围网渔船、刺网渔船等)、钓类鱼船、捕鲸船、渔业加工船、渔业调查船、冷藏运输船等。
港务船——破冰船、引航船、消防船、供应船、交通船、工作船(测量船船、航标船等)、浮油回收船等。
海洋开发船——海洋调查船,、深潜器(艇)、钻井船、钻井平台等。
拖船和推船——海洋拖船、港作拖船、,内河拖船、海洋拖船、内河拖船等。
、灯标发展中的高速船艇——水翼艇(划水式水翼艇、全浸式水翼艇)、气垫船(全浮式气垫船、侧壁式气垫船)、冲翼艇、半潜式小水面艇、穿浪船等。
军用舰艇的分类:水面战斗舰艇——航空母舰、直升机母舰、战列舰、巡洋舰,驱逐舰、护卫舰、导弹艇、鱼雷艇、猎潜艇、护卫艇等。
水中战斗舰艇——攻击型潜艇(柴油机动力、电动机动力)、战略导弹潜艇(常规动力、核动力)。
特种战斗舰船——两栖舰艇(两栖指挥舰、两栖攻击舰、船坞登陆舰、两栖船坞运输舰、坦克登陆舰、两栖货船、车辆人员登陆艇、通用登陆艇)、布雷舰艇、扫雷舰艇、猎雷艇。
辅助舰艇——后支援船(运输船、舰队补给船、供应维修船、卫生勤务船、捞雷船)、海上救助船(近岸救助船、远洋救助船、潜艇救助船、破冰船)、情报支援船(海洋调查船、侦察船、通讯船、测量船)、试验训练船(导弹靶船、导弹测量船、兵器试验船、海军训练船),港务支援船(港口建设船、港口作业船、港口勤务船等,这类船同民用船如勘探船、打桩船、起重船、驳船、拖船、挖泥船、交通船、引水船、供水船、航标船、灯船、消防船、浮船坞等)。
当今世界订单比例占量比较大的船及特点:1、油船(oil tanker)(油槽船(Tanker)是主要用来装运液体货物的船舶。
油槽船根据所装货物种类不同,又可分为油轮和液化天然气船)指运载石油及石油产品(柴油、汽油和重油等)的船舶。
为了防火防爆,甲板上不允许用带电拖动设备,通常用蒸汽机。
结构上也不设双层底,尾机型,干舷很小,船型丰满,船速不高,为13-17kn。
油船的特点是机舱都设在船尾,船壳衣身被分隔成数个贮油舱,有油管贯通各油舱。
油舱大多采用纵向式结构,并设有纵向舱壁,在未装满货时也能保持船舶的平稳性。
为取得较大的经济效益,二战以后油轮的载重吨位不断地增加,目前世界上最大的油轮载重吨位已达到60多万吨。
油轮以散装原油为主要承运对象,目前,世界上最大的油轮可装载55万吨原油,习惯上把载重量在20万吨以上,30万吨以下的油轮称为大型油轮(VLCC-Very Large CrudeCarrier),把30万吨以上的称为超大型油轮(ULCC-Ultra Large Crude Carrier),油轮装卸一般靠带泵的管道系统完成。
2、散货船的类型灵便型散货船:指载重量在2-5万吨左右的散货船,其中超过4万吨的船舶又被称为大灵便型散货船。
众所周知,干散货是海运的大宗货物,这些吨位相对较小的船舶具有较强的对航道、运河及港口的适应性,载重吨量适中,且多配有起卸货设备,营运方便灵活,因而被称之为“灵便型”。
巴拿马型散货船:顾名思义,该型船是指在满载情况下可以通过巴拿马运河的最大型散货船,即主要满足船舶总长不超过274.32米,型宽不超过32.30米的运河通航有关规定。
根据需要,调整船舶的尺度、船型及结构来改变载重量,该型船载重量一般在6-7.5万吨之间。
好望角型散货船:指载重量在15万吨左右的散货船,该船型以运输铁矿石为主,由于尺度限制不可能通过巴拿马运河和苏伊士运河,需绕行好望角和合恩角,台湾省称之为“海岬”型。
由于近年苏伊士运河当局已放宽通过运河船舶的吃水限制,该型船多可满载通过该运河。
大湖型散货船(Lake bulk carrier):是指经由圣劳伦斯水道航行于美国、加拿大交界处五大湖区的散货船,以承运煤炭、铁矿石和粮食为主。
该型船尺度上要满足圣劳伦斯水道通航要求,船舶总长不超过222.50米,型宽不超过23.16米,且桥楼任何部分不得伸出船体外,吃水不得超过各大水域最大允许吃水,桅杆顶端距水面高度不得超过35.66米,该型船一般在3万吨左右,大多配有起卸货设备。
3、集装箱船(container ship)是指以装运集装箱货物为主的船舶。
货舱多为单层甲板,双船壳,可堆放3-9层集装箱。
经济航速为19-24kn,集装箱规格:40ft(40×8×8ft)和20ft(20×8×8ft)两种。
事先将货物装入集装箱内,再把集装箱装上船。
这种运输方式的优点是装卸效率高、降低劳动强度、减少货损货差和便于开展多式联运。
目前,集装箱运输发展很快,已成为件杂货的主运输方式。
集装箱船基本上可以分为全集装箱船和半集装箱船两大类。
全集装箱船的货舱和甲板均能装载集装箱。
货舱内设有格栅式货架,以利货箱的固定。
其甲板和货舱盖是平直的,上面可以装2~4层集装箱。
通常船上不设起货设备,而利用码头上的专用设备装卸。
半集装箱船则而在部分货舱装运集装箱,其他货舱装运杂货或散货。
集装箱船的货舱舱口很大,为了保证船体强度,采用双层船壳。
其不仅装卸效率高,船速也较快,多在20k n 以上。
目前,已建造第六代集装箱船,可装载8000个集装箱。
集装箱船可分为部分集装箱船、全集装箱船和可变换集装箱船三种:(1).部分集装箱船(Partial container ship)。
仅以船的中央部位作为集装箱的专用舱位,其他舱位仍装普通杂货。
(2).全集装箱船(Full Container Ship)。
指专门用以装运集装箱的船舶。
它与一般杂货船不同,其货舱内有格栅式货架,装有垂直导轨,便于集装箱沿导轨放下,四角有格栅制约,可防倾倒。
集装箱船的舱内可堆放三至九层集装箱,甲板上还可堆放三至四层。
(3).可变换集装箱船(Convertible Container Ship)。
其货舱内装载集装箱的结构为可拆装式的。
因此,它既可装运集装箱,必要时也可装运普通杂货。