高级数据链路控制的介绍
hdlc协议原理
hdlc协议原理
高级数据链路控制HDLC是一种面向比特的链路层协议,其最大特点是不需要数据必须是规定字符集,对任何一种比特流,均可以实现透明的传输。
只要数据流中不存在同标志字段F相同的数据就不至于引起帧边界的错误判断。
万一出现同边界标志字段F相同的数据,即数据流中出现六个连1的情况,可以用零比特填充法解决。
标准HDLC协议族中的协议都是运行于同步串行线路之上,如:DDN。
HDLC的地址字段是8个比特,在平衡方式时总是写入应答站的地址。
控制字段8比特,用来实现HDLC协议的各种控制信息,并标识本帧的类型。
在标准HDLC协议格式中我们可以看到,它没有包含标识所承载的上层协议信息的字段,所以在链路层封装标准HDLC协议的单一链路上只能承载单一的网络层协议。
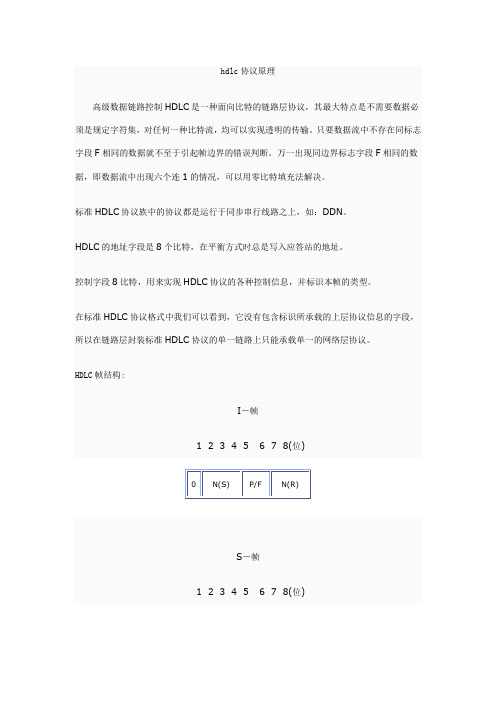
HDLC帧结构:
I-帧
1 2 3 4 5 6 7 8(位)
S-帧
1 2 3 4 5 6 7 8(位)
U-帧
1 2 3 4 5 6 7 8(位)
标志F:标志帧的开始和结尾,用以解决帧的同步。
标志为01111110。
在两个标志字段之间的比特串中,如果碰巧出现了和标志F一样的比特串,则HDLC采用零比特填空法使之不会出现连续6个"1"。
通信网_HDLC协议概述
HDLC协议概述摘要本文首先介绍了HDLC的发展历史以及HDLC协议的链路配置、帧结构等内容,并对现存的HDLC标准和其应用范围及发展前景进行了概述。
关键词HDLC协议数据链路层标准正文一、HDLC发展历史高级数据链路控制(High-level data link control),简称HDLC,是一个在同步网上传输数据、面向比特的数据链路层协议。
60年代,英国NPL网首先提出分组交换的概念。
之后,美国的ARPA网采用分组交换的方式运行。
计算机网络纷纷出现,但原来用于终端到计算机之间的通信的控制规程都是以字符为基础的,它们往往难以满足计算机到计算机之间的通信要求。
70年代初,IBM公司率先提出了面向比特的同步数据链路控制规程SDLC(Synchronous Data Link Control),SDLC是IBM 系统网络体系结构Systems Network Architecture(SNA)数据链路层的协议。
随后,美国国家标准化协会ANSI将SDLC修改为ADCCP(Advanced Data Control Procedure)做为国家标准;ISO将修改后的SDLC称为高级数据链路控制HDLC(High-level Data Link Contl),并将它做为国际标准。
HDLC与基本型规程相比较,它的主要进步在于引入一个标志F(01111110)和一个0比特插入机构,使传输数据的控制机构简单,并把面向比特的能力引入传输机构。
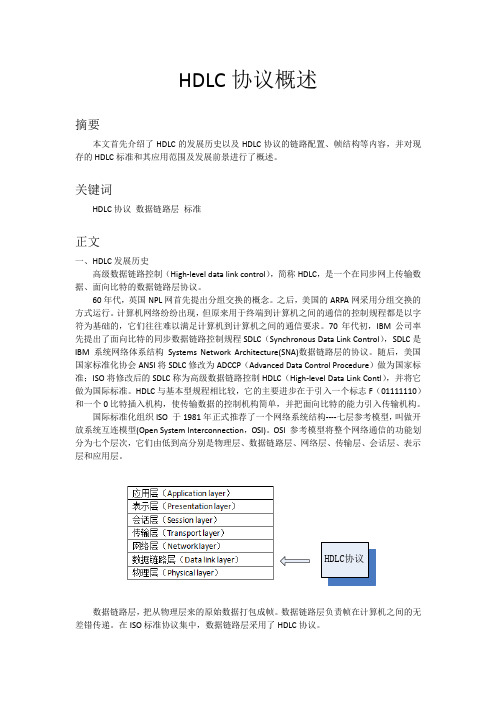
国际标准化组织ISO 于1981年正式推荐了一个网络系统结构----七层参考模型,叫做开放系统互连模型(Open System Interconnection,OSI)。
OSI 参考模型将整个网络通信的功能划分为七个层次,它们由低到高分别是物理层、数据链路层、网络层、传输层、会话层、表示层和应用层。
HDLC协议数据链路层,把从物理层来的原始数据打包成帧。
数据链路层负责帧在计算机之间的无差错传递。
HDLC协议
什么是HDLC?HDLC是什么意思?HDLC英文全称High level Data Link Control,高级数据链路控制,HDLC是一个在同步网上传输数据、面向位的数据链路层协议,它是个由1970年代IBM所提出的对称式资料连结控制(Synchronous Data Link Control,SDLC)所研发出来的ISO标准。
高级数据链路控制(HDLC)协议是基于的一种数据链路层协议,促进传送到下一层的数据在传输过程中能够准确地被接收(也就是差错释放中没有任何损失并且序列正确)。
HDLC 的另一个重要功能是流量控制,换句话说,一旦接收端收到数据,便能立即进行传输。
H DLC 具有两种不同的实现方式:高级数据链路控制正常响应模式即HDLC NRM(又称为SDLC)和 HDLC 链路访问过程平衡(LAPB)。
其中第二种使用更为普遍。
HDLC 是 X.25 栈的一部分。
HDLC 是面向比特的同步通信协议,主要为全双工点对点操作提供完整的数据透明度。
它支持对等链路,表现在每个链路终端都不具有永久性管理站的功能。
另一方面,HDLC NRM 具有一个永久基站以及一个或多个次站。
HDLC LAPB 是一种高效协议,为确保流量控制、差错监测和恢复它要求额外开销最小。
如果数据在两个方向上(全双工)相互传输,数据帧本身就会传送所需的信息从而确保数据完整性。
帧窗口是用于在接收第一个帧已经正确收到的确认之前发送复帧。
这就意味着在具有长“turn-around”时间滞后的情况下数据能够继续传送,而不需要停下来等待响应。
例如在卫星通信中会发生这种情形。
通常,帧分为三种类型:信息帧:在链路上传送数据,并封装OSI体系的高层;管理帧:用于实现流量控制和差错恢复功能;无编号帧:提供链路的初始化和终止操作。
协议结构Flag ― 该字段值恒为 0x7E。
Address Field ― 定义发送帧的次站地址,或基站发送帧的目的地。
PDH、SDH、MSTP、ASON、PTN、OTN技术介绍
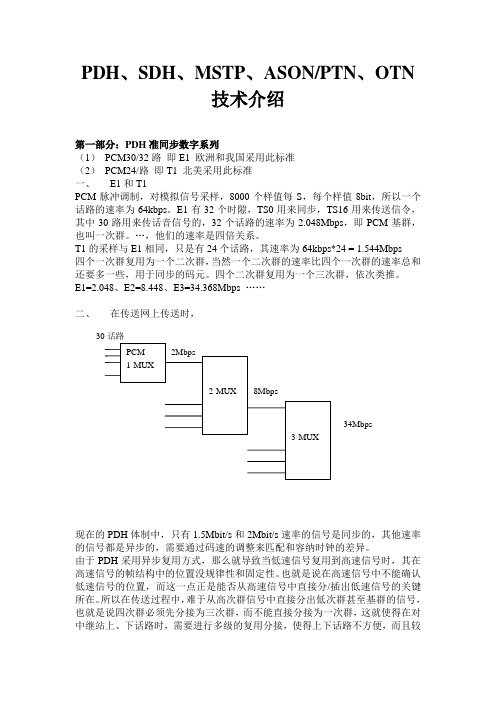
PDH 、SDH 、MSTP 、ASON/PTN 、OTN技术介绍第一部分:PDH 准同步数字系列(1) PCM30/32路 即E1 欧洲和我国采用此标准 (2) PCM24/路 即T1 北美采用此标准 一、 E1和T1PCM 脉冲调制,对模拟信号采样,8000个样值每S ,每个样值8bit ,所以一个话路的速率为64kbps 。
E1有32个时隙,TS0用来同步,TS16用来传送信令,其中30路用来传话音信号的,32个话路的速率为2.048Mbps ,即PCM 基群,也叫一次群。
…,他们的速率是四倍关系。
T1的采样与E1相同,只是有24个话路,其速率为64kbps*24 = 1.544Mbps 四个一次群复用为一个二次群,当然一个二次群的速率比四个一次群的速率总和还要多一些,用于同步的码元。
四个二次群复用为一个三次群,依次类推。
E1=2.048、E2=8.448、E3=34.368Mbps ……二、 在传送网上传送时,现在的PDH 体制中,只有1.5Mbit/s 和2Mbit/s 速率的信号是同步的,其他速率的信号都是异步的,需要通过码速的调整来匹配和容纳时钟的差异。
由于PDH 采用异步复用方式,那么就导致当低速信号复用到高速信号时,其在高速信号的帧结构中的位置没规律性和固定性。
也就是说在高速信号中不能确认低速信号的位置,而这一点正是能否从高速信号中直接分/插出低速信号的关键所在。
所以在传送过程中,难于从高次群信号中直接分出低次群甚至基群的信号,也就是说四次群必须先分接为三次群,而不能直接分接为一次群,这就使得在对中继站上、下话路时,需要进行多级的复用分接,使得上下话路不方便,而且较多的接口对于信号的损伤非常大。
使得提取的时钟出现不一致。
也增加了设备的复杂性,降低了效率和可靠性。
又存在多个制式,接口不统一,这就促成了PDH 发展为SDH——数字同步系列。
此部分介绍了PDH中的E1,和PDH组网的缺陷。
网络技术术语缩写

缩写:DTE:数据终端设备DCE:数据通信设备将计算机或终端与数据传输线路连接起来,达到传输、收集、分配和处理数据目的的系统称其为数据通信系统。
数据通信主要是针对计算机系统之间的数据传输和信息处理,其中包含了通信和信息处理两方面的含义。
通常点到点的通信系统包括信源,信道和信宿三个部分。
通信信道是指电信号沿发送器到接收器的通路,它包括传输介质及其有关的中间通信设备。
在数据通信系统中经常采用的传输介质有双绞线、光纤、电话线以及卫星通信等。
FDM:频分复用技术在物理信道的可用带宽超过单个信号所需带宽的情况下,可将物理信道的带宽分割成若干个与单个信号带宽相同(或略宽)的子信道,每个子信道传输一路信号,这就是频分多路复用。
多路不同的信号在传输前,先要通过频谱搬移技术将各路信号的带宽搬移到物理信道频谱的不同段上,即使不同信号的带宽不相互重叠,这可以通过采用不同的载波频率进行调制来实现。
频分复用技术中复合信号也称为宽带信号。
被复合的各路信号必须是模拟信号。
TDM:时分复用技术若媒介能达到的传输速率超过所传数据的传输速率,则可采用时分多路复用TDM技术,即将一条物理信道按时间分成若干个时间片,轮流地分配给多个信号使用。
每一时间片由复用的一个信号占用,而不像FDM那样,同一时间同时发送多路信号。
这样,利用每个信号在时间上的交叉,就可以在一条物理信道上传输多个数字信号。
这种交叉可以是位一级的,也可以是由字节组成的块或更大的信息组进行交叉。
用于数字信号,同步时分与异步时分。
CDMA 码分复用技术靠不同的编码来区分各路原始信号(每台发出的信号有每台的编码)的一种复用方式,主要和各种多址技术结合产生了各种接入技术,包括无线和有线接入。
例如在多址蜂窝系统中是以信道来区分通信对象的,一个信道只容纳1个用户进行通话,许多同时通话的用户,互相以信道来区分,这就是多址。
码分复用技术具有抗干扰能力强、隐蔽性好等诸多优点。
目前,它主要用于无线计算机网络和移动通信技术。
HDLC协议
HDLC协议协议名称:HDLC协议一、引言HDLC(High-Level Data Link Control)协议是一种数据链路层协议,用于在计算机网络中进行数据传输。
它提供了可靠的数据传输和错误检测功能,广泛应用于各种通信设备和网络中。
本协议旨在规范HDLC协议的标准格式和使用方法,确保数据传输的稳定性和可靠性。
二、术语定义1. HDLC:High-Level Data Link Control,高级数据链路控制协议。
2. 数据链路层:位于物理层和网络层之间的协议层,负责数据传输和错误检测。
3. 帧:数据链路层的基本单位,包含了控制信息和数据。
4. 控制信息:用于控制数据链路层的信息,包括起始标志、地址、控制字段、校验和等。
5. 确认帧:用于确认接收到的数据帧的帧。
6. 非确认帧:不需要确认的数据帧。
三、协议格式1. 帧结构HDLC协议的帧结构如下:| 起始标志 | 地址 | 控制字段 | 数据 | 校验和 | 结束标志 ||---------|------|---------|------|--------|---------|| 8 bits | 8 bits | 8 bits | N bits | 16 bits | 8 bits |- 起始标志:用于标识帧的开始,固定为01111110。
- 地址:用于标识接收方的地址,通常为8位二进制数。
- 控制字段:用于控制数据链路层的行为,包括传输模式、流控制等。
- 数据:实际传输的数据内容。
- 校验和:用于检测帧的传输错误,通常使用循环冗余校验(CRC)算法。
- 结束标志:用于标识帧的结束,固定为01111110。
2. 帧类型HDLC协议定义了以下几种帧类型:- 命令帧(Command Frame):用于发送命令或请求数据。
- 响应帧(Response Frame):用于回应命令或发送数据。
- 确认帧(Acknowledgement Frame):用于确认接收到的数据帧。
HDLC协议原理及其概述
HDLC协议原理及其应用概述摘要:数据链路层的主要功能是在物理层的数字比特流或字节流上传输信息帧,而高级数据链路控制HDLC(High-level Data Link Control)规程是通信领域现阶段应用十分广泛的一个数据链路层协议。
HDLC是面向比特的数据链路控制协议的典型代表,它是由国际标准化组织(ISO)定制的,为在数据链路层上操作提供了一系列的标准。
本文介绍了HDLC协议的发展历史、主要内容、存在的标准及其应用和发展前景。
关键词:数据链路层、HDLC协议引言根据通信的功能,整个通信过程可以分为若干层,每一层的对等协议通过使用下层服务对齐上层提供服务。
其中数据链路层在物理层提供服务的基础上向网络层提供透明的和可靠的数据传输服务。
为此,数据链路层必须具备一系列相应的功能,主要有:将数据组合成帧,并向帧中插入地址或协议类型信心;提供差错控制以确保可靠的传输;提供流量控制,以避免接收端缓冲区溢出;提供链路管理控制功能。
数据链路层的协议可以分为两类:面向字符的协议和面向比特的协议。
其中HDLC(高级数据链路控制)就是一种重要的面向比特的数据链路层协议。
一.HDLC的发展历史最早的数据链路层协议是面向字符的,有很多缺点:控制报文和数据报文格式不一样;采用停止等待方式,效率低;只对数据部分进行差错控制,可靠性较差;系统每增加一种功能就需要设定一个新的控制字符。
为克服这些缺点,上世纪七十年代初,IBM公司推出了著名的体系结构SNA。
在SNA的数据链路层规程采用了面向比特的规程SDLC(Synchronous Data Link Control)。
所谓“面向比特”就是帧首部中的控制信息不是由几种不同的控制字符组成,而是由首部中各比特的值来决定。
由于比特的组合是多种多样的,因此DLC协议能够满足各种用户的不同需求。
此外,SDLC还使用同步传输,效率比异步传输有了很大的提高。
后来ISO把SDLC修改后成为HDLC(High-level Data Link Control),作为国际标准ISO 3309。
六、数据链路层功能与协议
六、数据链路层功能与协议1、数据链路层的功能数据链路层在物理层提供服务的基础上向⽹络层提供服务。
作⽤:加强物理层传输原始⽐特流的功能,将物理层提供的可能出错的物理连接改造成逻辑上⽆差错的数据链路。
让它对⽹络层表现为⼀条⽆差错的链路。
1.1、为⽹络层提供的服务1.1.1、⽆确认的⽆连接的服务:源机器发送数据帧之前不⽤先建⽴链路连接,⽬的机器收到数据帧后也不要发回确认。
对丢失的帧,数据链路层不负责重发⽽交给上层处理,⽤来实时通信或者误码率较低的通信信道。
以太⽹就是这种机制服务1.1.2、有确认⽆连接的服务:源机器发送数据帧不需要建⽴链路连接,但是⽬的机器收到数据帧后必须发回确认。
源机器在所规定的时间内没有收到确认信号,就会重新传丢失的帧。
⽤来提⾼传输的可靠性。
这种服务常⽤在误码率⾼的通信信道,⽐如⽆线通信。
1.1.3、有确认的⾯向连接的服务:帧传输分为三个过程:建⽴数据链路,传输帧,释放数据链路。
这种服务⽤语通信要求,可靠性,实时性较⾼的情况下。
注:有连接就⼀定要有确认1.2数据链路层的链路管理1.2.1、数据链路层,连接的建⽴,维持,释放,三个过程叫做链路管理,主要还是⾯向连接的服务两个⼯作栈之间进⾏传输信息的时候,必须将⽹络层的分组(package)封装成帧(Frame),然后⽤帧的格式进⾏传送。
在数据的前后分别加上帧头和帧尾,就构成了帧。
1.2.2、帧头和帧尾的作⽤:确定帧的界限,也就是帧定界。
HDLC标准帧格式:前后都有标志位F(01111110)透明传输:不管所传数据是什么样的⽐特组合,都可以在连路上传送1.3、流量控制由于发送⽅和接收⽅的⼯作速率和缓存空间的差异,可能出现发送⽅发送能⼒⼤于接收⽅的能⼒。
如果不对链路上的信息流量限制,前⾯来不及接收的帧就会被后⾯不断发送的帧淹没,造成帧的丢失⽽出错。
流量控制:就是限制发送⽅的数据流量,使其发送速率不超过接收速率。
其实流量控制其它层也提供这个功能,只不过控制的对象不同⽽已。
HDLC技术介绍

技术介绍广域网协议HDLCHDLCHDLC简介HDLC(High-level Data Link Control,高级数据链路控制)是一种面向比特的链路层协议,其最大特点是对任何一种比特流,均可以实现透明的传输。
z HDLC协议只支持点到点链路,不支持点到多点。
z HDLC不支持IP地址协商,不支持认证。
协议内部通过Keepalive报文来检测链路状态。
z HDLC协议只能封装在同步链路上,如果是同异步串口的话,只有当同异步串口工作在同步模式下才可以应用HDLC协议。
目前应用的接口为:工作在同步模式下的Serial接口和POS接口等。
HDLC的帧类型和帧格式HDLC有信息帧(I帧)、监控帧(S帧)和无编号帧(U帧)3种不同类型的帧。
z信息帧用于传送有效信息或数据,通常简称为I帧。
z监控帧用于差错控制和流量控制,通常称为S帧。
z无编号帧用于提供对链路的建立、拆除以及多种控制功能,简称U帧。
HDLC帧由标志、地址、控制、信息和帧校验序列等字段组成。
z标志字段为0111110,标志一个HDLC帧的开始和结束,所有的帧必须以F 开头,并以F结束;在邻近两帧之间的F,即作为前面帧的结束,又作为后续帧的开头;z地址字段是8比特,用于标识接收或发送HDLC帧的地址;z控制字段是8比特,用来实现HDLC协议的各种控制信息,并标识是否是数据;z信息字段可以是任意的二进制比特串,长度未作限定,其上限由FCS字段或通讯节点的缓冲容量来决定,目前国际上用得较多的是1000-2000比特,而下限可以是0,即无信息字段。
但是监控帧中不可有信息字段。
z帧检验序列字段可以使用16位CRC,对两个标志字段之间的整个帧的内容进行校验。
1。
HDLC

高级数据链路控制(High-Level Data Link Control或简称HDLC),是一个在同步网上传输数据、面向比特的数据链路层协议,它是由国际标准化组织(ISO)根据IBM公司的SDLC(Synchronous Data Link Control)协议扩展开发而成的.七十年代初,IBM公司率先提出了面向比特的同步数据链路控制规程SDLC(Synchronous Data Link Control)。
随后,ANSI和ISO均采纳并发展了SDLC,并分别提出了自己的标准:ANSI的高级通信控制过程ADCCP(Advanced Data Control Procedure),ISO的高级数据链路控制规程HDLC(High-level Data Link Contl)。
链路控制协议着重于对分段成物理块或包的数据的逻辑传输,块或包由起始标志引导并由终止标志结束,也称为帧。
帧是每个控制、每个响应以及用协议传输的所有信息的媒体的工具。
所有面向比特的数据链路控制协议均采用统一的帧格式,不论是数据还是单独的控制信息均以帧为单位传送。
每个帧前、后均有一标志码01111110,用作帧的起始、终止指示及帧的同步。
标志码不允许在帧的内部出现,以免引起畸意。
为保证标志码的唯一性但又兼顾帧内数据的透明性,可以采用“0比特插入法”来解决。
该法在发送端监视除标志码以外的所有字段,当发现有连续5个“1”出现时,便在其后添插一个“0”,然后继续发后继的比特流。
在接收端,同样监除起始标志码以外的所有字段。
当连续发现5个“1”出现后,若其后一个比特“0”则自动删除它,以恢复原来的比特流;若发现连续6个“1”,则可能是插入的“0”发生差错变成的“1”,也可能是收到了帧的终止标志码。
后两种情况,可以进一步通过帧中的帧检验序列来加以区分。
“0比特插入法”原理简单,很适合于硬件实现。
在面向比特的协议的帧格式中,有一个8比特的控制字段,可以用它以编码方式定义丰富的控制命令和应答,相当于起到了BSC协议中众多传输控制字符和转义序列的功能。
软件专业词汇
新词积累Swimming lane design: 数据流交互图JIRA:是Atlassian公司出品的项目与事务跟踪工具,被广泛应用于缺陷跟踪、客户服务、需求收集、流程审批、任务跟踪、项目跟踪和敏捷管理等工作领域。
JIRA中配置灵活、功能全面、部署简单、扩展丰富.Heartbeat:是Linux-HA 工程的一个组成部分,它实现了一个高可用集群系统。
心跳服务和集群通信是高可用集群的两个关键组件,在Heartbeat 项目里,由heartbeat 模块实现了这两个功能。
下面描述了heartbeat 模块的可靠消息通信机制,并对其实现原理做了一些介绍。
A(Active-matrix)主动矩阵(Adapter cards)适配卡(Advanced application)高级应用(Analytical graph)分析图表(Analyze)分析(Animations)动画(Application software)应用软件(Arithmetic operations)算术运算(Audio-output device)音频输出设备(Access time)存取时间(A ccess)存取(A ccuracy)准确性(A d network cookies)广告网络信息记录软件(A dministrator)管理员(Add-ons)插件(Address)地址(Agents)代理(Analog signals)模拟信号(Applets)程序(Asynchronous communications por t)异步通信端口(Attachment)附件AGP(accelerated graphics port)加速图形接口ALU (arithmetic-logic unit)算术逻辑单元AAT(Average Access Time) 平均存取时间ACL(Access Control Lists)访问控制表ACK(acknowledgement character)确认字符ACPI (Advanced Configuration and Power Interface)高级配置和电源接口ADC(Analog to Digital Converter) 模数转换器ADSL(Asymmetric Digital Subscriber Line)非对称用户数字线路ADT(Abstract Data Type) 抽象数据类型AGP(Accelerated Graphics Port)图形加速端口AI(Artif icial Intelligence) 人工智能AIFF(Audio Image File Format) 声音图像文件格式ALU(Arithmetic Logical Unit) 算术逻辑单元AM(Amplitude Modulation) 调幅ANN(Artificial Neural Network) 人工神经网络ANSI(American National Standard Institute)美国国家标准协会API(Application Programming Interface)应用程序设计接口APPN(Advanced Peer-to-Peer Network )高级对等网络ARP(Address Resolution Protocol) 地址分辨/ 转换协议ARPG(Action Role Playing Game) 动作角色扮演游戏ASCII (American Standard Code for Information Interchange)美国信息交换标准代码ASP(Active Server Page) 活动服务器网页ASP(Application Service Provider) 应用服务提供商AST(Average Seek Time) 平均访问时间ATM(asynchronous transfer mode)异步传输模式ATR (Automatic Target Recognition) 自动目标识别AVI (Audio Video Interleaved)声音视频接口Algorithm 算法B(Bar code)条形码(Bar code reader)条形码读卡器(Basic application)基础程序Beta testing Beta测试是一种验收测试。
《计算机网络教学资料》第4章数据链路层

网卡
01
02
03
04
网卡是计算机与网络连接的硬 件设备,负责将计算机接入网
络,实现数据传输功能。
网卡具备MAC地址,用于标 识网络中的唯一节点。
网卡具备数据链路层的功能, 如封装成帧、透明传输等。
网卡还具备物理层的功能,如 信号传输、物理地址识别等。
网桥
01
网桥是一种网络设备, 用于连接两个或多个网 络段,实现数据链路层 的互联。
详细描述:SLIP协议使用压缩技术来减少传输的数据量 ,从而提高传输效率。它通过在数据包中删除重复的IP 地址和头部信息来实现压缩。
详细描述:SLIP协议的简单性使其易于实现和维护,但 同时也限制了其可靠性和性能。因此,SLIP协议在现代 网络中已经较少使用。
IEEE 802系列协议
总结词
局域网标准
THANKS
感谢观看
《计算机网络教学资 料》第4章数据链路
层
目录
• 数据链路层概述 • 数据链路层协议实例 • 数据链路层的设备 • 数据链路层的流量控制和差错控制
01
数据链路层概述
数据链路层的基本概念
数据链路层是网络体系结构中 的第二层,位于物理层和网络 层之间。
数据链路层的主要目的是将数 据分组(或帧)从一个网络节 点传输到另一个网络节点。
交换机可以识别数据帧中的MAC地 址,根据MAC地址表进行数据帧的 转发。
交换机还可以实现网络的流量控制和 负载均衡,提高网络的性能和可靠性。
04
数据链路层的流量控制和 差错控制
流量控制
定义
流量控制是为了避免发送方发送 速率过快,导致接收方来不及接 收和处理数据而采取的一种控制
机制。
方法
高级链路控制协议的作用
高级链路控制协议的作用高级链路控制协议(High-Level Link Control Protocol,简称HDLC)是一种数据链路层协议,用于在通信过程中进行数据的传输和控制。
它的作用是确保数据的可靠传输和正确处理,同时提供流量控制和错误检测的功能。
HDLC协议主要应用在计算机网络和通信领域,用于在物理层和数据链路层之间建立和维护连接。
它可以通过点对点或多点配置来实现不同设备之间的数据传输。
HDLC协议在数据传输过程中,通过添加控制信息和校验码来确保数据的完整性和正确性。
HDLC协议提供了流量控制的功能。
在数据传输过程中,发送方和接收方之间的速度可能不一致,为了避免数据的丢失和溢出,HDLC协议通过使用滑动窗口协议来控制数据的传输速度。
发送方根据接收方的确认信息来动态调整数据的发送速度,从而保证数据的可靠传输。
HDLC协议还可以进行错误检测和纠正。
在数据传输过程中,由于噪声、干扰或其他原因,可能会导致数据的损坏或丢失。
为了确保数据的正确性,HDLC协议使用循环冗余校验(CRC)来检测和纠正错误。
发送方在发送数据时,会附加一个校验码,接收方在接收数据时,会对接收到的数据进行校验,如果发现错误,接收方会向发送方发送一个重传请求,以便重新发送数据。
HDLC协议还支持多点连接和全双工通信。
在多点连接中,一个发送方可以同时与多个接收方进行通信,通过使用不同的地址来区分接收方。
而在全双工通信中,发送方和接收方可以同时进行数据的发送和接收,从而提高数据传输的效率和速度。
总结起来,高级链路控制协议(HDLC)在计算机网络和通信领域起着非常重要的作用。
它通过提供流量控制和错误检测的功能,确保数据的可靠传输和正确处理。
同时,它还支持多点连接和全双工通信,提高了数据传输的效率和速度。
在实际应用中,HDLC协议被广泛应用于各种通信设备和网络中,为数据的传输和控制提供了可靠的解决方案。
数据链路层的基本概念
数据链路层的基本概念数据链路层的基本概念是计算机网络中的一个关键概念。
数据链路层位于OSI模型中的第二层,负责传输物理层提供的比特流,并将其转化为有意义的数据帧。
它提供了在两个直接相连的节点之间可靠的数据传输服务,同时确保数据的完整性、可靠性和有序性。
本文将逐步回答关于数据链路层基本概念的问题。
一、什么是数据链路层?数据链路层是OSI模型中的第二层,在网络协议栈中位于物理层之上。
它作为网络的关键部分,连接了物理层和网络层。
数据链路层主要负责两个连接节点之间的点对点数据传输,并提供差错控制、流量控制和访问控制等功能。
二、数据链路层的功能有哪些?1. 封装与解封装:数据链路层负责将上层从网络层接收到的数据报封装到数据帧中发送给物理层,同时接收来自物理层的比特流,并将其解封装为数据帧交给网络层。
2. 物理寻址与MAC地址:数据链路层通过物理寻址使用唯一的MAC地址来标识网络中的每个节点,保证数据帧能够准确地传输到指定的目的节点。
3. 差错检测与纠正:数据链路层使用差错检测算法,如循环冗余校验(CRC),来检测数据帧在传输过程中是否发生了比特差错,并在需要时进行纠正。
4. 流量控制与传输可靠性:数据链路层实现了流量控制机制,以确保发送方和接收方之间的数据传输速率匹配,同时使用滑动窗口协议来确保数据的可靠传输。
5. 访问控制与介质共享:数据链路层通过介质访问控制协议,如CSMA/CD(载波监听多路访问/碰撞检测)和TDMA(时分多址),来管理共享介质上的多个节点的访问,实现数据的分时复用。
三、数据链路层的协议有哪些?数据链路层的常见协议包括:1. PPP(点对点协议):PPP是一种广泛应用于拨号连接和宽带接入的数据链路层协议,它提供了认证、加密和压缩等功能。
2. HDLC(高级数据链路控制):HDLC是一种同步数据链路层协议,广泛应用于广域网和局域网中,用于数据通信。
3. Ethernet(以太网):Ethernet是一种广泛应用于局域网的数据链路层协议,它使用CSMA/CD协议来实现多节点间的共享传输。
计算机网络常用网络缩写名词解释答案
常用网络名词缩写解释:TCP--- TransmissionControlProtocol传输控制协议TCP是一种面向连接(连接导向)的、可靠的、基于字节流的运输层(Transportlayer)通信协议ICMP---是(InternetControlMessageProtocol)Internet控制报文协议。
它是TCP/IP协议族的一个子协议,用于在IP主机、路由器之间传递控制消息UDP--- UserDatagramProtocol的简称,中文名是用户数据报协议,是OSI参考模型中一种无连接的传输层协议,提供面向事务的简单不可靠信息传送服务NNTP---网络新闻传输协议。
这是一个主要用于阅读和张贴新闻文章(俗称为"帖子",比较正式的是"新闻组邮件")到Usenet上的Internet应用协议,也负责新闻在服务器间的传送。
SNMP--- (Simple Network Management Protocol,简单网络管理协议)的前身是简单网关监控协议(SGMP),用来对通信线路进行管理。
IGP---内部网关协议SNTP---简单网络时间协议(SNTP:SimpleNetworkTimeProtocol)SNTPV4由NTP改编而来,主要用来同步因特网中的计算机时钟。
IGRP---是一种动态距离向量路由协议,它由Cisco公司八十年代中期设计。
使用组合用户配置尺度,包括延迟、带宽、可靠性和负载。
缺省情况下,IGRP每90秒发送一次路由更新广播,在3个更新周期内(即270秒),没有从路由中的第一个路由器接收到更新,则宣布路由不可访问。
PPP---点对点协议(PPP:Point to Point Protocol)点对点协议(PPP)为在点对点连接上传输多协议数据包提供了一个标准方法。
BGP4--- 边界网关协议4.0版本。
因特网上所用的主要区域间路由选择协议的第4版。
网路七层协议图之每一层对应的设备及功能
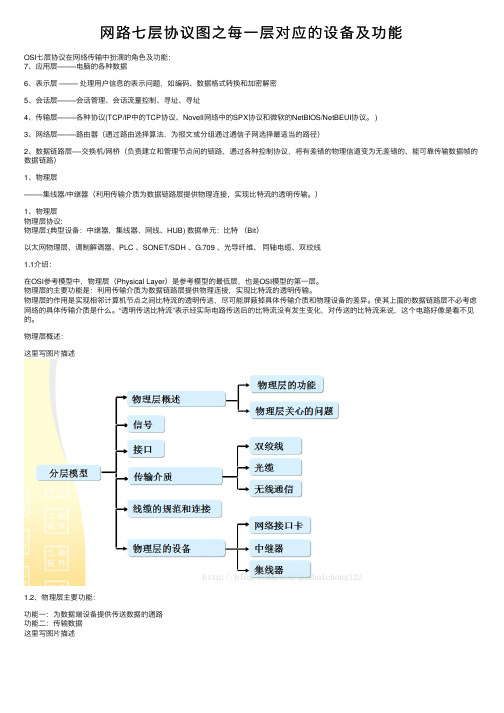
⽹路七层协议图之每⼀层对应的设备及功能OSI七层协议在⽹络传输中扮演的⾓⾊及功能:7、应⽤层——–电脑的各种数据6、表⽰层 ——– 处理⽤户信息的表⽰问题,如编码、数据格式转换和加密解密5、会话层——–会话管理、会话流量控制、寻址、寻址4、传输层——–各种协议(TCP/IP中的TCP协议、Novell⽹络中的SPX协议和微软的NetBIOS/NetBEUI协议。
)3、⽹络层——–路由器(通过路由选择算法,为报⽂或分组通过通信⼦⽹选择最适当的路径)2、数据链路层—-交换机/⽹桥(负责建⽴和管理节点间的链路,通过各种控制协议,将有差错的物理信道变为⽆差错的、能可靠传输数据帧的数据链路)1、物理层——–集线器/中继器(利⽤传输介质为数据链路层提供物理连接,实现⽐特流的透明传输。
)1、物理层物理层协议:物理层:(典型设备:中继器,集线器、⽹线、HUB) 数据单元:⽐特(Bit)以太⽹物理层、调制解调器、PLC 、SONET/SDH 、G.709 、光导纤维、同轴电缆、双绞线1.1介绍:在OSI参考模型中,物理层(Physical Layer)是参考模型的最低层,也是OSI模型的第⼀层。
物理层的主要功能是:利⽤传输介质为数据链路层提供物理连接,实现⽐特流的透明传输。
物理层的作⽤是实现相邻计算机节点之间⽐特流的透明传送,尽可能屏蔽掉具体传输介质和物理设备的差异。
使其上⾯的数据链路层不必考虑⽹络的具体传输介质是什么。
“透明传送⽐特流”表⽰经实际电路传送后的⽐特流没有发⽣变化,对传送的⽐特流来说,这个电路好像是看不见的。
物理层概述:这⾥写图⽚描述1.2、物理层主要功能:功能⼀:为数据端设备提供传送数据的通路功能⼆:传输数据这⾥写图⽚描述【转】OSI第⼀层物理层介绍集线器/中继器介绍:1.中继器(repeater)中继器是位于第1层(OSI参考模型的物理层)的⽹络设备。
当数据离开源在⽹络上传送时,它是转换为能够沿着⽹络介质传输的电脉冲或光脉冲的——这些脉冲称为信号(signal)。
高级数据链路控制(HDLC)的操作行为研究

( S h a n g q i u P o l y t e c h n i c ,S h a n g q i u 4 7 6 0 0 0 ,C h i n a )
A b s t r a c t :T h e h i g h — l e v e l d a t a l i n k c o n t r o l (H D L C)i s o n e o f t h e i m p o r t a n t d a t a l i n k c o n t r o l p r o t o c o l s . HD L C o p e r a t i o n b e —
ha vi o r i s r e s e a r c h e d i n t h i s pa p e r t o i mp r o v e t he n e t wo r k pe fo r r ma nc e a nd s e r vi c e q ua l i t y .HDLC i s n o t o n l y wi de l y us e d, b ut a l s o
数 据 链 路 控 制 协 议 的 基 础 。为 了更 好 地 提 高 高速 网络 的 性 能 与 服 务 质 量 , 在此主要对 H D L C的操 作 行 为进 行 研 究 。详 细 解释
HD L C的三 个阶段 的操作 , 并用范例对 H D L C的操作原理进行 了说 明, 易于理解接受。
K e y wo r d s:HDL C;o p e r a t i o n b e h a v i o r ;f r a me ;d a t a l i n k c o n t r o l p r o t o c o l
HDLC协议高级数据链路控制协议

HDLC协议高级数据链路控制协议HDLC(High-Level Data Link Control)协议是一种高级数据链路控制协议,被广泛应用于计算机网络和通信领域。
本文将介绍HDLC协议的基本原理、特点和应用,并探讨其在现代通信系统中的重要性。
一、HDLC协议的基本原理HDLC协议是一种数据链路层协议,通过将数据划分为不同的数据帧来实现可靠的数据传输。
它定义了帧的结构、帧的传输方式以及数据的校验等重要内容。
HDLC协议主要包括以下几个方面的内容:1. 帧结构:HDLC协议将数据划分为不同的帧,每个帧包含帧开始标记、地址字段、控制字段、信息字段、校验码等部分。
帧开始标记用于标识帧的开始,地址字段用于标识帧的发送方或接收方,控制字段用于传输控制信息,信息字段用于传输数据,校验码用于检测传输过程中是否出现错误。
2. 帧传输:HDLC协议支持三种帧传输方式,分别是非确认传输、确认传输和多点传输。
非确认传输方式适用于数据传输不需要确认的场景,确认传输方式适用于需要确认的场景,多点传输方式适用于一对多的通信。
3. 数据校验:HDLC协议使用循环冗余校验(CRC)算法对数据进行校验,以确保传输过程中数据的完整性。
CRC算法通过计算数据的校验值,并将其附加在传输的数据帧中,接收方根据校验值验证数据的正确性。
二、HDLC协议的特点HDLC协议具有以下几个特点:1. 高效性:HDLC协议采用了帧封装的方式进行数据传输,可以高效地利用通信资源,提高传输效率。
2. 可靠性:HDLC协议通过数据校验和确认机制,可以确保传输过程中数据的可靠性,减少传输错误。
3. 灵活性:HDLC协议支持多种帧传输方式和多点传输方式,适用于不同的通信场景。
4. 可扩展性:HDLC协议可以通过定义不同的控制字段和功能码来扩展其应用范围,满足不同的通信需求。
三、HDLC协议的应用HDLC协议在计算机网络和通信系统中得到了广泛应用,具有重要的意义。
hdlc是什么层的协议

竭诚为您提供优质文档/双击可除hdlc是什么层的协议篇一:hdlc协议及帧格式介绍hdlc协议及帧格式介绍一、hdlc协议:1、hdlc的定义高级数据链路控制(high-leveldatalinkcontrol或简称hdlc),是一个在同步网上传输数据、面向比特的数据链路层协议,它是由国际标准化组织(iso)根据ibm公司的sdlc(synchronousdatalinkcontrol)协议扩展开发而成的.[注]:这些协议的特点是所传输的一帧数据可以是任意位,而且它是靠约定的位组合模式,而不是靠特定字符来标志帧的开始和结束,故称"面向比特"的协议。
2、hdlc的特点hdlc协议具有以下特点:数据报文可透明传输;全双工通讯;采用窗口机制和捎带应答;采用帧校验序列,并对信息帧进行顺序编号,防止漏收或重收,传输可靠性高;传输控制功能和处理功能分离,应用非常灵活。
hdlc执行数据传输控制功能,一般分为3个阶段:数据链路建立阶段、信息帧传送阶段、数据链路释放阶段。
二、hdlc帧格式:1、帧格式定义异步数据业务和以太网数据业务在信道上传输采用连续同步hdlc帧格式封装,收发时钟均采用信道时钟。
0x7e2bytes1bytenbytesccitt-160x7ehdlc帧格式帧头字段:0x7e地址字段:用于用户信道设备的识别广播地址:0xFFFF控制字段:控制字段主要用于识别hdlc帧内封装的信息类型数据字段:(由信道误码率和丢帧率确定)长度校验字段:2bytes校验方式:ccitt-16帧尾字段:0x7e篇二:ppp协议和hdlc协议区别ppp帧格式和hdlc帧格式相似,如图1所示。
二者主要区别:ppp是面向字符的,而hdlc是面向位的图1ppp帧格式可以看出,ppp帧的前3个字段和最后两个字段与hdlc 的格式是一样的。
标志字段F为0x7e(0x表示7e),但地址字段a和控制字段c都是固定不变的,分别为0xFF、0x03。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:本文简单介绍了数据链路控制协议,并重点介绍了HDLC的基本概念及帧格式。
公司的产品越来越先进,单板也越来越复杂,单板与单板之间,单板与终端之间数据传输的容量与可靠性要求也越来越高,简单的通讯方式满足不了要求的。
HDLC链路控制协议是公司常见的同步协议,为使不了解它的人有一个初步的认识,本文简单介绍了数据链路控制协议,重点介绍了HDLC的基本概念及帧格式,如果想进一步了解,可以参考《HDLC协议标准》及HDLC协议控制芯片手册。
一、数据链路控制协议数据链路控制协议也称链路通讯规程,也就是OSI参考模型中的数据链路层协议。
数据链路控制协议一般可分为异步协议和同步协议两大类。
对于异步协议,我们再熟悉不过了,常用的一些单片机及异步串口芯片均提供异步串口,如MCS51、MCS96、8031、80386、16C2552、82C452、SD511等等。
异步协议以字符为独立的传输信息单位,在每个字符的起始处开始对字符内的比特实现同步,但字符与字符之间的间隔时间是不固定的(即字符之间是异步的)。
由于发送器和接收器中近似于同一频率的两个约定时钟,能够在一段较短的时间内保持同步,所以可以用字符起始处同步的时钟来采样该字符的各比特,而不需要每个比特同步。
异步协议中因为每个传输字符都要添加诸如起始位、校验位及停止位等冗余位,故信道利用率很低,一般用于数据速率较低的场合。
同步协议是以许多字符或许多比特组织成的数据块---帧为传输单位,在帧的起始处同步,在帧内维持固定的时钟。
实际上该固定时钟是发送端通过某种技术将其混合在数据中一并发送出去的,供接收端从数据中分离出时钟来。
由于采用帧为传输单位,所以同步协议能更好地利用信道,也便于实现差错控制、流量控制等功能。
同步协议又可分为面向字符的同步协议、面向比特的同步协议及面向字节计数的同步协议。
面向字符的同步协议是最早提出的同步协议,其典型代表是IBM公司的二进制同步通讯协议(Binary Synchronous Communication ,BISYNC 或BSC)协议,通常也称该协议为基本协议,随后A NSI和ISO 都提出类似的相应的标准。
ISO的标准称为数据通讯系统的基本控制过程(Basic mode procedures for data communication System),即ISO1745标准。
二、面向比特的同步协议七十年代初,IBM公司率先提出了面向比特的同步数据控制规程SDLC(Synchronous Data Link Control)。
随后,ANSI和ISO均采纳并发展了SDLC,并分别提出了自己的标准:A NSI的高级通讯控制过程ADCCP(Advanced Data Communication Control Procedure),ISO的高级数据链路控制规程————HDLC(High_level Data Link Control)。
链路控制协议着重于对分段成物理块或包的数据的逻辑传输,块或包由起始标志引导并由终止标志结束,也称为帧。
帧是每个控制、每个响应以及用协议传输的所有信息的媒体和工具。
所有面向比特的数据链路控制协议均采用统一的帧格式,不论是数据还是单独的控制信息均以帧为单位传送。
每个帧前、后均有一标志码01111110,用作帧的起始、终止指示帧的同步。
标志码不允许在帧的内部出现,以免引起畸意。
为保证标志码的唯一性但又兼顾帧内数据的透明性,可以采用“0比特插入法”来解决。
该法在发送端监视除标志码以外的所有字段,当发现有连续的5个“1”出现时,便在其后添加一个“0”,然后继续发送后继的比特流。
在接收端,同样监视除除标志码以外的所有字段。
当连续发现5个“1”出现后,若其后一个比特为“0”,则自动删除它,以恢复原来的比特流;若发现连续6个连“1”,则可能是插入的“0”发生错误,也可能是收到了终止标志码。
作为面向比特的同步数据控制协议的典型,HDLC具有如下特点:1、协议不依赖于任何一种字符编码集;2、数据报文可透明传输,用于透明传输的“0比特插入法”易于硬件实现;3、全双工通讯,不必等待确认可连续发送数据,有较高的数据链路传输效率;4、所有帧均采用CRC校验,对信息帧进行顺序编号,可防止漏收或重收,传输可靠性高;5、传输控制功能与处理功能分离,具有较大的灵活性和较完善的控制功能。
由于以上特点,目前网络设计及整机内部通讯设计普遍使用HDLC数据链路控制协议。
1.11、HDLC的操作方式HDLC是通用的数据链路控制协议,当开始建立数据链路时,允许选用特定的操作方式。
所谓链路操作方式,通俗地讲就是以主节点方式操作,还是以从节点方式操作,或者是二者兼备。
在链路上用于控制目的的节点称为主节点,其他的受主节点控制的节点称为从节点。
主节点负责对数据流进行组织,并且对数据上的差错实施恢复。
由主节点发往从节点的帧称为命令帧,而由从节点返回主节点的帧称为响应帧。
连有多个节点的链路通常使用轮询技术,轮询其他节点的节点为主节点,而在点到点链路中每个节点均可为主节点。
在一个节点点连接多条链路的情况下,该节点对于一些链路而言可能是主节点,而对另外一些链路而言有可能是从节点。
HDLC中常用的操作方式有3种:(1)正常响应方式NRM正常响应方式NRM(Normal Response Mode)一种非平衡数据链路操作方式,有时也称为非平衡正常响应方式。
该操作方式使用于面向终端的点到点或一点到多点的链路。
在这种操作方式下,传输过程由主节点启动,从节点只有收到主节点某个命令帧后,才能作为响应向主节点传输信息。
响应信息可以由一个或多个帧组成,若信息由多个帧组成,则应指出哪一帧是最后一帧。
主节点负责管理整个链路,且具有轮询、选择从节点及及向从节点发送命令的权利,同时也负责对超时、重发及各类恢复操作的控制。
(2)异步响应方式A RM异步响应方式ARM(Asynchronous Response Mode)也是一种非平衡数据链路操作方式,与NRM不同的是,A RM下的传输过程由从节点启动。
从节点主动发送给主节点的一个或一组帧中可包含有信息,也可以是仅以控制为目的而发的帧。
在这种操作方式下,由从节点来控制超时和重发。
该方式对采用轮询方式的多节点点链路来说是比不可少的。
(3)异步平衡方式A BM异步平衡方式A BM(Asynchronous Balanced Mode)是一种允许任何节点来启动传输的操作方式。
为了提高链路传输效率,节点之间在两个方向上都需要有较高的信息传输量。
在这种操作方式下,任何时候任何节点都能启动传输操作,每个节点点即可以作为主节点又可以作为从节点,即每个节点都是组合节点。
各个节点都有相同的一组协议,任何节点都可以发送或接受命令,也可以给出应答,并且各节点对差错恢复过程都负有相同的责任。
1.22、HDLC的帧格式在HDLC中,数据和控制报文均以帧的标准格式传送。
HDLC中的帧类似于BSC的字符块,但不是独立传输的。
HDLC的完整的帧由标志字段(F)、地址字段(A)、控制字段(C)、信息字段(I)、帧校验序列字段(FCS)等组成:-240 标志 F 8位控制字段C 信息字段I帧校验序列字段FCS标志 F01111118位N位16位01111110(1)标志字段(F)标志字段为01111110的比特模式,用以标志帧的开始与结束,也可以作为帧与帧之间的填充字符。
通常,在不进行帧传送的时刻,信道仍处于激活状态,在这种状态下,发送方不断地发送标志字段,而接收方则检测每一个收到的标志字段,一旦发现某个标志字段后面不再是一个标志字段,便可认为新的帧传动已经开始。
采用“0比特插入法”可以实现数据的透明传输。
(2)地址字段(A)地址字段的内容取决于所采用的操作方式,有主节点、从节点、组合节点之分。
每个从节点与组合节点都被分配一个唯一的地址,命令帧中的地址字段携带的是对方节点的地址,而响应帧中的地址字段所携带的地址是本节点的地址。
某一地址也可分配给不止一个节点,这种地址称为组地址,利用一个组地址传输的帧能被组内所有拥有该地址的节点接收。
但当一个节点或组合节点发送响应时,它仍应当用它唯一的地址。
还可以用全“1”地址来表示包含所有节点的地址,称为广播地址,含有广播地址的帧传送给链路上所有的节点。
另外还规定全0的地址为无节点地址,不分配给任何节点,仅作为测试用。
(3)控制字段(C)控制字段用于构成各种命令及响应,以便对链路进行监视与控制。
发送方主节点或组合节点利用控制字段来通知被寻址的从节点或组合节点执行约定的操作;相反,从节点用该字段作为对命令的响应,报告已经完成的操作或状态的变化。
该字段是HDLC的关键。
控制字段中的第一位或第一位、第二位表示传送帧的类型即信息帧(I帧)、监控帧(S帧)和无编号帧(U帧)3种不同类型的帧。
控制字段的第五位是P/F位,即轮询/终止位(POLL/Final)位。
(4)信息字段(I)信息字段可以是任意的二进制比特串,长度未作限定,其上限由FCS字段或通讯节点的缓冲容量来决定,目前国际上用得较多的是1000-2000比特,而下限可以是0,即无信息字段。
但是监控帧中不可有信息字段。
(5)帧校验序列字段(FCS)帧检验序列字段可以使用16位CRC,对两个标志字段之间的整个帧的内容进行校验。
FCS的生成多项式是CCITT V.41建议的X'16+X'12+X'5+1。
1.33、HDLC的帧类型HDLC有信息帧(I帧)、监控帧(S帧)和无编号帧(U帧)3种不同类型的帧。
每一种帧中的控制字段的格式及比特定义如下:(1)信息帧(I帧)信息帧用于传送有效信息或数据,通常简称为I帧。
I帧以控制字段第一位为0为标志。
控制字段中的N (S)用于存放发送帧序列,以便发送方不必等待确认而连续发送多帧。
N(R)用于存放接收方下一个预期要接收的帧的序号。
N(S)与N(R)均为3位二进制编码,可取值0—7。
(2)监控帧(S帧)监控帧用于差错控制和流量控制,通常称为S帧。
S帧以控制字段第一位、二位为“10”来标志。
S帧不带信息字段,只有6个字节即48个比特。
S帧的控制字段的第三、四位为S帧类型编码,共有4种不同的编码,分别是:00——接受就绪(RR),由主节点或从节点发送。
主节点可以使用RR型S帧来轮询从节点,即希望从节点传输编号为N(R)的I帧,若存在这样的帧,便可以进行传输,从节点也可以用RR型S帧来作响应,表示从节点希望从主节点那里接收的下一个I帧的编号是N(R)。
01——拒绝(REJ),由主节点或从节点发送,用以要求发送方从编号为N(R)开始的帧及其后所有的帧进行重发,着也暗示N(R)以前的I帧以被正确接收。
10——接收未就绪(RNR),表示编号小于N(R)的I帧已被收到,但目前正处于忙状态,尚未准备好接受编号为N(R)的I帧,这可用来对链路进行流量控制。