第4章 -多自由度系统振动
昆虫记第4章内容概括
昆虫记第4章内容概括
《昆虫记》是法国作家让·亨利·法布尔所写的一部科学幻想小说,全书共有十七章。
以下是《昆虫记》第四章的内容。
第四章名为《雄蜂》,主要描述了主人公弗朗茨发现自己已经变成一只雄蜂的经历。
在这一章中,弗朗茨在蛹的壳中醒来,并意识到他发生了巨大的变化。
他感受到自己的身体变得更加细长,触角和翅膀的感觉也截然不同。
他试图用腿爪站立,但发现自己无法立即适应新的构造。
随着时间的推移,弗朗茨逐渐适应了新的形态。
他开始尝试使用自己的触角感知周围的世界,并试图展翅飞行。
然而,在初次试飞时,他遇到了困难并摔倒在地。
尽管如此,弗朗茨仍然渴望能够自由地飞翔。
他不断尝试,并通过不断的努力和实践,逐渐掌握了飞行的技巧。
最终,他成功地从地面上升空,自由地在空中翱翔,并开始探索广阔的昆虫世界。
第四章《雄蜂》通过描述弗朗茨作为一只雄蜂的适应过程,
展示了生命的转变和个体的成长。
这一章中也传达出作者对于探索和自由的渴望的主题。
必修二 第4章 第2节 基因表达与性状的关系

第2节基因表达与性状的关系1、同一株水毛茛,裸露在空气中的叶和沉浸在水中的叶,表现出了两种不同的形态,这两种形态的叶,其细胞的基因组成一样吗?这两种叶形的差异,可能是由什么因素引起的?(1)这两种形态的叶,其细胞的基因组成是一样的;(2)这两种叶形的差异,可能是由叶片所处的环境因素引起的。
2、基因表达产物与性状之间有什么关系?(1)基因通过控制酶的合成来控制代谢过程,进而控制生物体的性状;(2)基因还能通过控制蛋白质的结构直接控制生物体的性状。
3、举例说明,基因通过控制酶的合成来控制代谢过程,进而控制生物体的性状。
举例1:皱粒豌豆:若编码淀粉分支酶的基因中插入一段外来的DNA序列,就会打乱原有基因的碱基排列顺序,导致淀粉分支酶出现异常,活性大大降低,进而使细胞内淀粉含量降低。
淀粉在细胞中具有保留水分的作用,当豌豆成熟时,淀粉含量高的豌豆能有效的保留水分,十分饱满,即,圆粒豌豆。
淀粉含量低的温度不能有效保留水分,豌豆由于失水而皱缩,即,皱粒豌豆。
举例2:白化病:酪氨酸酶存在于正常人的皮肤、毛发等处,它能将酪氨酸转变为黑色素。
如果一个人酪氨酸酶基因异常,就会缺少酪氨酸酶,那么这个人就不能合成黑色素,从而表现出白化症状。
4、举例说明,基因通过控制蛋白质的结构直接控制生物体的性状。
举例1:囊性纤维病:编码CFTR蛋白(一种转运蛋白)的基因缺失了三个碱基,导致CFTR 蛋白在508位缺少苯丙氨酸,其空间结构发生变化,使CFTR转运氯离子的功能出现异常,导致患者支气管中粘液增多,管腔受阻,细菌在肺部大量生长繁殖,最终使肺功能严重受损。
举例2:镰状细胞贫血:编码血红蛋白的基因发生突变,其中有一个氨基酸-谷氨酸被替换为缬氨酸,导致血红蛋白的空间结构发生改变,变成镰状,该蛋白质无法正常携带氧气,使患者患镰状细胞贫血。
5、有三种细胞,细胞中的DNA都含有卵清蛋白基因、珠蛋白基因和胰岛素基因,但只检测到其中一种基因的mRNA,这一事实说明了什么?说明:细胞中并不是所有的基因都表达,基因的表达存在选择性。
习题参考答案(第4章)
a' V XH
a
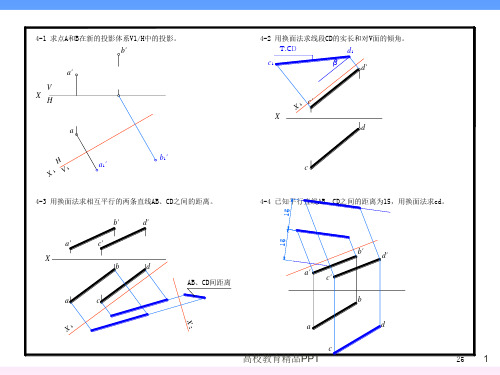
4-2 用换面法求线段CD的实长和对V面的倾角。
T.CD
d1
c1 d'
X 1 c' X
d
H X1 V1
a1'
b1'
c
4-3 用换面法求相互平行的两条直线AB、CD之间的距离。
b'
d'
a'
c'
X
b
d
a
c
AB、CD间距离
4-4 已知平行直线AB、CD之间的距离为15,用换面法求cd。
15
15
a' c'
b'
d'
b
X2
பைடு நூலகம்X1
a
d
c
高校教育精品PPT
25 1
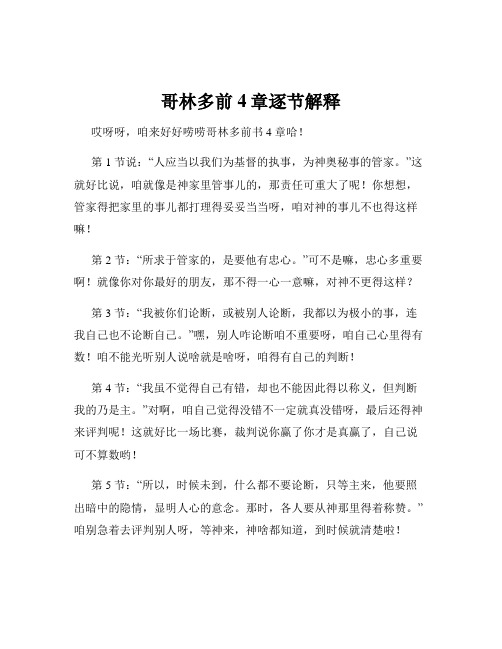
4-5 已知直线AB与CD垂直相交,用换面法求c'd'。 b'
a'
c a
b d
4-6 用换面法求点到直线BC距离,并求垂足。
a'
c'
b'
c a
A到BC距离 b
O2
4-7 已知点A到直线BC的距离为15,求a。 a1
R15
b1
c1
O1
a b
c a'1
c'1 c2
a2
b1' b2
高校教育精品PPT
27 3
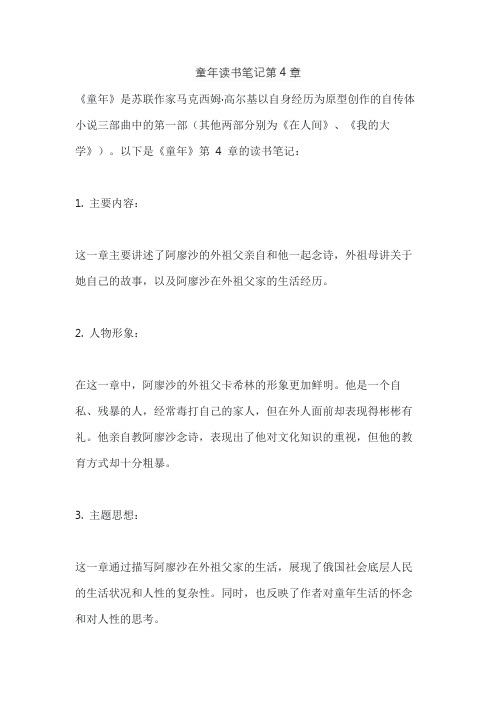
4-11 已知直线AB与 CDE的距离为10,用换面法求ab。
c' e'
b'
a' X
约翰4章逐节最简单解释

约翰4章逐节最简单解释哎呀呀,咱来瞧瞧约翰福音 4 章哈。
第一节,就好像打开了一扇神秘的大门,约翰开始给咱讲述一些事儿啦!比如说,耶稣知道自己得干啥,就出发啦!这不就跟咱知道要去超市买东西,然后抬腿就走一个样嘛。
再看第二节,耶稣累了,就在雅各井旁歇着,这多正常呀,咱走累了也得找地儿歇歇不是?然后呢,第三节,这时候出来个撒玛利亚妇人来打水,这就像你在公园正溜达呢,突然碰到个熟人一样。
第四节,耶稣跟这妇人说话啦,嘿,这场景就跟咱在街上碰到人聊天似的。
第五节,妇人很惊讶耶稣跟她说话,可不是嘛,要是突然有个陌生人跟你搭话,你也得惊讶一下呀。
第六节,耶稣说想要水喝,这多实在呀,渴了就要水嘛。
第七节,妇人就奇怪耶稣咋找她要水,这反应也很正常呀,咱要是遇到个不太熟的人找咱要东西,也得犯嘀咕呀。
第八节,门徒们去买食物了,这就好比你的朋友们去买吃的去了。
第九节,妇人就问耶稣一些问题,这就像咱好奇的时候会不停地问一样。
第十节,耶稣给她讲活水的事儿,哇,这可神奇了,就好像有人告诉你有个神奇的宝贝一样。
第十一节,妇人听不懂呀,可不嘛,这么高深的事儿,哪能一下就明白呢。
第十二节,耶稣就进一步解释,这多耐心呀,就跟老师给学生讲题似的。
第十三节,妇人这下好像有点明白了,这不就是学习新知识的过程嘛。
第十四节,耶稣说的话简直太厉害了,能让人永远不渴,这多牛呀!第十五节,妇人这下心动了,想让耶稣给她这水,这很自然呀,谁不想有好东西呢。
第十六节,耶稣又说了些别的,这就像聊天聊到深处了。
第十七节,妇人终于知道耶稣不是一般人啦,这恍然大悟的感觉,咱有时候也会有呀。
第十八节,妇人说自己没丈夫,这多坦诚呀。
第十九节,耶稣却指出她的真实情况,哇,这洞察力!第二十节,妇人说到敬拜的地方,这就像咱讨论去哪儿玩一样。
第二十一节,耶稣说敬拜不在乎地方,这话多有深度呀!第二十二节,原来撒玛利亚人和犹太人有矛盾呢,这就像两个有矛盾的群体。
第二十三节,耶稣说要用心灵和诚实敬拜,这简直就是真理呀!第二十四节,神是个灵,敬拜他得用心,这多对呀!第二十五节,妇人这下觉得耶稣肯定是个大先知,可不是嘛,这么厉害的人能不是嘛。
哥林多前4章逐节解释
哥林多前4章逐节解释哎呀呀,咱来好好唠唠哥林多前书 4 章哈!第 1 节说:“人应当以我们为基督的执事,为神奥秘事的管家。
”这就好比说,咱就像是神家里管事儿的,那责任可重大了呢!你想想,管家得把家里的事儿都打理得妥妥当当呀,咱对神的事儿不也得这样嘛!第 2 节:“所求于管家的,是要他有忠心。
”可不是嘛,忠心多重要啊!就像你对你最好的朋友,那不得一心一意嘛,对神不更得这样?第 3 节:“我被你们论断,或被别人论断,我都以为极小的事,连我自己也不论断自己。
”嘿,别人咋论断咱不重要呀,咱自己心里得有数!咱不能光听别人说啥就是啥呀,咱得有自己的判断!第 4 节:“我虽不觉得自己有错,却也不能因此得以称义,但判断我的乃是主。
”对啊,咱自己觉得没错不一定就真没错呀,最后还得神来评判呢!这就好比一场比赛,裁判说你赢了你才是真赢了,自己说可不算数哟!第 5 节:“所以,时候未到,什么都不要论断,只等主来,他要照出暗中的隐情,显明人心的意念。
那时,各人要从神那里得着称赞。
”咱别急着去评判别人呀,等神来,神啥都知道,到时候就清楚啦!第6 节:“弟兄们,我为你们的缘故,拿这些事转比自己和亚波罗,叫你们效法我们不可过于圣经所记,免得你们自高自大,贵重这个,轻看那个。
”这不就是提醒咱,别盲目崇拜谁,要照着圣经来呀!第 7 节:“使你与人不同的是谁呢?你有什么不是领受的呢?若是领受的,为何自夸,仿佛不是领受的呢?”咱得清楚咱拥有的都是神给的呀,有啥好骄傲的呢?第 8 节:“你们已经饱足了!已经丰富了!不用我们,自己就作王了!我愿意你们果真作王,叫我们也得与你们一同作王。
”这多有意思呀,好像在说,嘿,你们觉得自己可了不起啦,都不用我们啦!第 9 节:“我想神把我们使徒明明列在末后,好像定死罪的囚犯;因为我们成了一台戏,给世人和天使观看。
”咱使徒就像在演一场戏,给大家看呢!第 10 节:“我们为基督的缘故算是愚拙的,你们在基督里倒是聪明的;我们软弱,你们反倒强壮;你们有荣耀,我们倒被藐视。
高中化学第四章知识点归纳一

煌敦市安放阳光实验学校课标必修1第四章知识点归纳1.非金属元素的种类:在迄今为止发现和合成的112种元素中非金属元素有16种。
(依据元素三分法)。
2.非金属元素的存在形式:游离态和化合态两种。
(1)硅元素:只存在化合态,主要以二氧化硅和硅酸盐的形式存在。
(2)氯元素:只存在化合态,主要以氯化钠的形式存在于海水和陆地的盐。
(3)硫元素:游离态存在于火山喷口附近或地壳的岩层里,化合态主要以硫化物和硫酸盐的形式存在,在火山喷出物里含有大量的含硫化合物,如硫化氢、二氧化硫和三氧化硫;硫还是一种生命元素,组成某些蛋白质时离不开它。
(4)氮元素:游离态主要存在于空气中,化合态主要存在于土壤中,氮元素也是蛋白质的重要组成元素。
3.非金属单质种类与元素种类是两码事,因为存在同素异形体(同一元素形成的不同单质互称同素异形体的缘故)。
(1)氧元素有O2和O3两种单质形式。
(2)硫元素由单斜硫和斜方硫两种单质形式。
(3)氮元素有N2和N4两种单质形式。
(4)磷元素有红磷和白磷两种单质形式。
(5)碳元素有石、石墨、无形碳、C60、C120多种形式。
4.只由非金属元素构成的化合物种类:离子化合物和共价化合物。
(1)离子化合物主要是:铵盐NH4Cl 、NH4NO3(2)共价化合物有:非金属氢化物:CH4、NH3、H2O、HF非金属氧化物:CO 、CO2 、NO 、NO2非金属互化物:CS2、非金属含氧酸:H2CO3、H2SiO35.非金属元素的化合价推断方法:画出元素的原子结构示意图,根据最外层电子数就是最高正价数,最外层电子数减去8(或2)得到该元素的最低价态,最低价态和最高价态之间的所有化合价皆有可能形成。
6.非金属元素的化合价规律是:最外层电子数是奇数的元素其化合价通常也是奇数价,最外层电子数是偶数的元素其化合价通常也是偶数价。
氯元素的常见价态:-1 、+1 、+3 、+5 、+7,例外的有+4,例如:二氧化氯(ClO2)。
妈妈的银行账户第4章概括

妈妈的银行账户第4章概括
摘要:
1.妈妈的银行账户的故事背景
2.第4 章的主要情节
3.第4 章中的人物关系和情感变化
4.第4 章的结局和对后续情节的铺垫
正文:
《妈妈的银行账户》是一部以家庭为背景的小说,讲述了一个发生在普通家庭中的温馨故事。
在第4 章中,作者通过细腻的笔触和富有生活气息的情节,展现了人物之间的情感纠葛和成长变化。
故事背景设定在上世纪80 年代的一个普通中国家庭。
在这个家庭中,母亲是一个勤劳持家的妇女,她为了家庭和孩子们付出了很多。
家庭经济并不宽裕,因此母亲在银行开了一个账户,每个月都会存入一部分钱,以备不时之需。
这个银行账户成了家庭的“保险箱”,象征着母亲对家庭的爱与付出。
第4 章的主要情节围绕着家庭中的一次危机展开。
这一天,家里的老房子突然出现了漏水的问题,需要紧急修缮。
然而,家庭经济状况使得母亲无法承担这笔费用。
在焦虑和无助之际,母亲想起了银行账户,决定取出一部分钱来解决燃眉之急。
在这个过程中,母亲与孩子们之间的情感关系发生了微妙的变化。
一方面,孩子们对母亲的决定表示理解和支持,认为这是母亲为了家庭付出的又一体现;另一方面,孩子们也感受到了家庭责任的沉重,纷纷提出要为家庭分担
压力。
经过一番波折,漏水问题得到了解决。
母亲也在这次事件中感受到了孩子们的成长和担当,深感欣慰。
而孩子们也在这次危机中更加理解了母亲的付出和家庭的意义。
第4 章的结局为后续情节的铺垫起到了关键作用。
在接下来的故事中,家庭成员将在共同面对困难和成长的过程中,更加深刻地体会到亲情的可贵和家庭的力量。
《中华人民共和国简史》第4章内容

《中华人民共和国简史》第4章:社会主义建设的伟大胜利第一节:社会主义革命和社会主义建设的伟大开创中华人民共和国成立后,面临着国民经济几乎完全崩溃的困难局面。
作为一个农业国家,我国的工业基础非常薄弱,人民生活水平极低。
我国领导人们毅然决定进行社会主义革命和建设,推动国家迅速走上繁荣富强之路。
在社会主义革命中,我国领导人民进行了广泛的和城乡改革,实现了农村的土地国有化,彻底打破了封建土地所有制,为农民创造了广阔的发展空间。
在城市,进行了大规模的国有企业建立和经济重组,使工人阶级得到了更好的待遇。
通过这些改革,我国实现了从封建社会到社会主义社会的历史性转变,为国家的发展奠定了坚实的基础。
第二节:社会主义建设的伟大胜利和巨大成就我国领导下的社会主义建设取得了巨大的成就。
在经济建设方面,我国成功地进行了和农村人民公社化运动,推动了国民经济的飞速增长。
在政治建设方面,我国建立了和各级人大,使人民享有了民主权利和政治参与权。
在文化建设方面,我国进行了广泛的社会主义精神文明建设,培养了一大批具有高度文化素养的劳动者和知识分子。
在对外事务方面,我国进行了独立自主的对外政策,取得了包括与苏联的修裂在内的外交斗争的胜利,为国家的和平发展和国际地位的提升奠定了坚实的基础。
总结回顾:社会主义革命和建设是我国领导下的伟大事业,为我国人民的幸福生活提供了坚实保障。
它不仅在经济上改善了人民生活,还在政治、文化和对外事务上取得了令人瞩目的成就。
在这一过程中,我国人民经历了艰苦卓绝的奋斗,展现了独立自主、自力更生的伟大精神。
社会主义革命和建设的伟大胜利,丰富了我国的历史文化遗产,也为今后的发展和繁荣奠定了坚实的基础。
个人观点和理解:社会主义革命和建设是我国领导下实现国家富强和人民幸福的必经之路。
它不仅是一种社会制度的选择,更是一种精神的追求。
在这一历史进程中,我国人民展现了伟大的创造力和毅力,也积累了宝贵的经验和教训。
相信在党的坚强领导下,我国社会主义事业一定会不断取得新的成就,为实现中华民族伟大复兴的国繁荣不懈奋斗!社会主义革命和建设是中华人民共和国发展历程中的重要篇章,它标志着我国由一个封建社会向社会主义社会的历史性转变,为国家的繁荣和人民的幸福打下了坚实的基础。
童年读书笔记第4章
童年读书笔记第4章
《童年》是苏联作家马克西姆·高尔基以自身经历为原型创作的自传体小说三部曲中的第一部(其他两部分别为《在人间》、《我的大学》)。
以下是《童年》第4 章的读书笔记:
1. 主要内容:
这一章主要讲述了阿廖沙的外祖父亲自和他一起念诗,外祖母讲关于她自己的故事,以及阿廖沙在外祖父家的生活经历。
2. 人物形象:
在这一章中,阿廖沙的外祖父卡希林的形象更加鲜明。
他是一个自私、残暴的人,经常毒打自己的家人,但在外人面前却表现得彬彬有礼。
他亲自教阿廖沙念诗,表现出了他对文化知识的重视,但他的教育方式却十分粗暴。
3. 主题思想:
这一章通过描写阿廖沙在外祖父家的生活,展现了俄国社会底层人民的生活状况和人性的复杂性。
同时,也反映了作者对童年生活的怀念和对人性的思考。
4. 艺术特色:
《童年》运用了多种艺术手法,如心理描写、对比手法、象征等。
在第4 章中,作者通过对外祖父和外祖母的对比,展现了人性的善恶。
同时,通过对阿廖沙心理活动的描写,表现了他对生活的恐惧和对未来的迷茫。
七年级上册生物第4章《细胞怎样构成生物体》知识点

七年级上册生物第4章《细胞怎样构成生物体》知识点一、细胞通过分裂产生新细胞:1、生物体由小长大,与细胞生长、细胞分裂和细胞分化有关。
①细胞生长:使细胞的体积增大。
②细胞分裂:结果是使细胞数目增多。
概念:一个细胞分成两个细胞的过程。
③细胞分化:使细胞形态、结构、生理功能改变,形成不同组织。
细胞分化过程中,遗传物质没有发生改变。
高度分化的细胞,不再具有分裂能力。
2、细胞生长:细胞不断从周围环境中吸收营养物质并转变成组成自身的物质,体积会由小变大,但是细胞不能无限长大,生长到一定大小就会进行分裂。
3、细胞分裂过程(核、质、膜、壁)①细胞核由一个分成两个。
②细胞质分成两份,每份各含有一个细胞核。
③植物细胞:在原来的细胞中央,形成新的细胞膜和细胞壁。
③动物细胞:细胞膜从细胞的中部向内凹陷,缢裂为两个细胞。
细胞分裂过程中,染色体的变化最明显。
染色体先进行复制,再均分成完全相同的两份,分别进入两个新细胞。
两个新细胞的染色体形态和数目相同,新细胞与原细胞的染色体形态和数目也相同。
假如某生物正常体细胞中含有n条染色体,该细胞在分裂过程中,染色体数目变化情况是 n→2n→n。
4、染色体由DNA和蛋白质组成。
不同的生物个体,染色体的形态、数量完全不同;同种生物个体的染色体形态和数量是一定的。
5、癌细胞:正常细胞变为癌细胞的过程称为癌变。
①分裂速度非常快,会不断分裂形成肿瘤。
②可侵入邻近的正常组织及远处的组织和器官。
③细胞癌变的实质是细胞的遗传特性发生改变。
④癌细胞不分化。
二、动物体的结构层次:1、人生长发育起点:动物和人体的发育都是从一个细胞开始的,这个细胞是受精卵。
2、细胞分化形成不同的组织:(1)细胞分化:在个体发育过程中,一个或一种细胞通过分裂产生的后代,在形态、结构和生理功能上发生差异性的变化。
(2)组织的概念:由形态相似,结构和功能相同的细胞联合在一起形成的细胞群叫做组织。
(3)人的四种基本组织:上皮组织、结缔组织、肌肉组织、神经组织。
弟子规第4章信原文
弟子规第4章信原文
《弟子规》第四章信的原文如下:
凡出言,信为先,诈与妄,奚可焉。
话说多,不如少,惟其是,勿佞巧。
奸巧语,秽污词,市井气,切戒之。
见未真,勿轻言,知未的,勿轻传。
事非宜,勿轻诺,苟轻诺,进退错。
凡道字,重且舒,勿急疾,勿模糊。
彼说长,此说短,不关己,莫闲管。
见人善,即思齐,纵去远,以渐跻。
见人恶,即内省,有则改,无加警。
唯德学,唯才艺,不如人,当自砺。
若衣服,若饮食,不如人,勿生戚。
闻过怒,闻誉乐,损友来,益友却。
闻誉恐,闻过欣,直谅士,渐相亲。
无心非,名为错,有心非,名为恶。
过能改,归于无,倘掩饰,增一辜。
这一章主要讲述了诚信的重要性,以及在日常生活中应该如何做到言而有信,不妄言、不轻诺、不传未经证实的消息等。
同时,也提到了在面对别人的优缺点时应该如何正确应对,以及如何通过自我反省和提升来不断完善自己。
高一数学第4章知识点归纳

高一数学第4章知识点归纳第4章数列的概念与数列的性质数列是指按照一定规律排列的一组数。
在高一数学的学习中,数列是一个重要的概念,它涉及到很多数学问题的解法。
本章主要介绍了数列的概念、数列的性质以及数列运算等知识点。
一、数列的概念数列是由一系列按照一定顺序排列的数所组成的序列。
数列可以看作是对一般函数的简化,它只涉及到自变量为正整数的情况。
数列的一般表示形式为{an}或者(a1, a2, a3, ...),其中an表示数列的第n个数。
二、数列的性质1. 公式与通项数列可以用公式来表示,这个公式可以描述数列中的每一项与其下标之间的关系。
通项是指数列中的第n个数的一般表示形式。
通过得到数列的通项公式,我们可以方便地求出数列的任意项。
2. 递推关系数列中的每一项都与它前面的某些项有关,这种关系称为递推关系。
通过递推关系我们可以得到数列中的每一项,从而利用这些项进行数列的相关问题的求解。
3. 数列的有界性数列可以是有界的,也可以是无界的。
有界数列是指数列的所有项都在某个范围内变动的数列,无界数列则是指数列中的项无限地趋向于正无穷或负无穷。
4. 数列的单调性数列可以是单调增加的,也可以是单调减少的。
单调增加的数列是指数列的每一项都大于前一项,单调减少的数列则是指数列的每一项都小于前一项。
三、数列运算1. 数列的四则运算数列之间可以进行加减乘除运算,这与我们在初中学习的四则运算是类似的。
对于两个数列进行加减乘除运算,我们只需要对相应的项进行对应的运算即可。
2. 数列的和与积数列的和指的是数列中所有项的和,数列的积则是指数列中所有项的乘积。
求数列的和与积可以通过数列的通项公式以及数列中项的个数来计算。
四、数列的应用1. 等差数列等差数列是指数列中相邻两项之间的差值是相等的数列。
等差数列在数学中有很多应用,特别是在代数运算以及几何问题中经常会用到。
2. 等比数列等比数列是指数列中相邻两项之间的比值是相等的数列。
等比数列在数学中也有广泛的应用,特别是在比例问题和指数函数中经常会用到。
编译原理第4章习题答案
2)文法: S SS | SS* | a 输入串:aaa*a++ 自底向上语法分析过程:
c.消除左递归:S->aS’ S’->SAS’|Ɛ A->+|*
代入
S->aS’ S’->aS’AS’|Ɛ A->+|*
d.得到的文法适用于自顶向下的语法分析吗? 适用。因为文法中不存在左公因子,也不存在左递归
4.4.3 S->SS+|SS*|a
FIRST(S)={a}
因为S是起始符号,把{$}加入到Follow(S)中。 对于S->SS+的第一个S,把First(S+) = {a}加入到Follow(S)中。 对于S->SS*的第一个S,把First(S*) = {a}加入到Follow(S)中。 对于S->SS+的第二个S,把First(+) = {+}加入到Follow(S)中。 对于S->SS*的第二个S,把First(*) = {*}加入到Follow(S)中。 所以,FOLLOW(S)={a,+,*,$}
S A| B A AA | E0E (A是0比1多的串) B BB | E1E (B是1比0多的串) E 0E1E | 1E0E | (E是0和1的个数相等的串)
5)所有由0和1组成的且其中不包含子串011的串的集合。
S AB A 1 A | B 0 B | 01 B |
6)所有由0和1组成的形如xy的串的集合,其中 x y 且x和y等长。 S AB | BA A XAX | 0 (A是奇数长度,中间为0的串) B XBX | 1 (B是奇数长度,中间为1的串) X0|1
《乡土中国》第4章《差序格局》课件20张-统编版高中语文必修上册
2.阅读本章第四段(“西洋的社会有些像我们在田里捆柴”至“我 们不妨称之作团体格局”),回答问题。
试对本段文字的论证方法和研究方法作简要分析。
此段为比喻论证,说明“团体格局”的特点,具体、形象、通俗。 这是类型化研究,就是通过对研究对象做标准化的分类以理清研究对象 各部分间的关系。作者把西洋社会的“格局”归类为“团体格局”。但 他并没有直接进行理论论述,而以自身经验为基础,把中国社会具有鲜 明乡土特征的“捆柴”作为比拟物,使两者产生关联,让中国读者对西 洋社会的“格局”体会深刻。
4.阅读本章第二十段至第二十三段(“我们一旦明白这个能放能收、 能伸能缩的社会范围”至“我将留在下篇里再提出来讨论了”),简 要概括其论述的主要内容。
最后几个自然段在与西洋个人主义的比较中,论述中国传统乡土 社会以“己”为中心的自我主义,并进而论述大异其趣的中西方群己 界限、权利和义务关系、团体和国家观念。群和己的界限模糊、国与 家的概念不清,已是所有圈子的中心,克己成为中国传统社会中最重 要的德性。结尾处提出一个新的问题:即基于差序格局的中国传统社 会道德问题。
格局中自己与他人的关系有亲疏远近。比如传统结构中,每 一家以自己的地位为中心,在周围划出一个圈子,也就是“街 坊”。有喜事要请酒,生了孩子要送红鸡蛋,有丧事要出来助殓、 抬棺材。在这个圈子内,发生的事情只与自家有关,超出范围则 没有任何联系了。这是从地缘关系上反映出差序格局具有伸缩性。 每家以自己的地位为中心,划出一个范围,范围的大小依着中心 的势力薄厚而定。有势力的人家的街坊可以遍及全村,穷苦人家 的街坊只是比邻的两三家。可是势力一旦发生变化,尤其是由大 变小,树倒猢狲散,范围也随之变化,缩成一团,人情也因之而 改变,变薄变冷。由此,便有了“世态炎凉”的感触。
歌罗西书第4章讲解

歌罗西书第4章讲解《歌罗西书第4章讲解》第四章是《歌罗西书》这封保罗书信的最后一章,我们可以从中得到很多关于基督教信仰的教导和指导。
本章主要强调祷告、智慧、行为、传教、弟兄姐妹的团结和鼓励等内容。
保罗开始这一章节的讲解时呼吁信徒们要持续切求祷告,要有坚定的信心来面对任何困难和试炼。
他提醒大家要有感恩的心态,时刻心存感恩,因为我们的神是赐予一切善物的神。
保罗教导信徒们要为他们传扬神的道而祷告,并祈求神开启传道的机会。
他还鼓励信徒们要用智慧与非信徒相处,以便用言语行事给他们带来益处。
保罗接着谈到信徒们的行为,他告诫信徒们要过着端正的生活,要存心纯正,在一切事情上都要顺服神的旨意。
他特别关注慎重的用语,对于我们的言论应该如何控制。
保罗也提到我们的行为应该合乎时宜,充满智慧。
在传教的话题上,保罗鼓励信徒们要以智慧来向非信徒分享福音。
他要求信徒们要像“良善的鹰”一样,在传道时要飞翔,要敢于面对各种困难和挑战。
保罗还强调,我们在传道中应该借助圣灵的能力和智慧,并将福音的好消息清晰明了地传达给他人。
在本章的最后部分,保罗给信徒们的指导是关于彼此相待的团结和鼓励。
他提到我们应该彼此关怀、鼓励,要有一个团结亲爱的弟兄姐妹的关系。
保罗还特别提到提摩太的事情,他希望提摩太能安抚信徒们的心灵,带给他们鼓励。
总结而言,《歌罗西书第四章》强调了祷告、智慧、行为、传教以及弟兄姐妹的团结和鼓励。
这些都是我们作为基督徒应该注重的事项。
我们应该时刻以感恩的心态向神祷告,要用智慧来面对周围的世界,过着端正的生活,并且以明智的方式传播福音。
并且,我们也应该与其他信徒建立团结亲爱的关系,鼓励和支持彼此。
保罗在这封信中给我们的教导是非常有价值的,我们应该在日常生活中融入这些教导,去影响和改变我们所处的环境。
林前4章全部解释
林前4章全部解释
第 4 章可是有着丰富的内涵呀!就好像一个宝藏盒子,打开它,里面全是宝贝。
比如,4:1 说“人应当以我们为基督的执事,为神奥秘事的管家。
”这不就像是我们在生活中被赋予了重要的职责,要好好管理属于神的事务吗?哎呀呀,这可真不简单呢!
4:2 又提到“所求于管家的,是要他有忠心。
”这不就好比老板要求员工要有忠心耿耿的态度嘛!你说是不是?
再看看 4:3 到 5 节,“我被你们论断,或被别人论断,我都以为极小的事,连我自己也不论断自己。
我虽不觉得自己有错,却也不能因此得以称义,但判断我的乃是主。
”这就好像别人对我们说三道四,可我们心里清楚,真正能评判我们的只有主呀!就像在学校里,那些无关紧要的同学的议论,我们才不在乎呢!
还有后面说的那些,都是在告诉我们要如何在信仰中成长,如何面对各种情况。
我觉得呀,第 4 章就是在指引我们在信仰的道路上稳稳前行,告诉我们要坚守忠心,不要在乎那些无关紧要的评判,要把目光聚焦在主的身上!
以上只是我很浅显的一些理解啦,每个人读可能都会有不同的感悟呢!。
歌罗西4章逐节解释

歌罗西4章逐节解释嘿,咱今儿就来好好唠唠歌罗西 4 章!这可有意思了呢!先看第一节,“你们作主人的,要公公平平地待仆人,因为知道你们也有一位主在天上。
”哎呀呀,这就好比你是一个团队的老大,你得公平对待手下的人呀,就像你也希望天上的那位主公平对待你一样!比如说,你不能因为自己的喜好就偏袒某些人,而冷落了其他人,对吧?再看第二节,“你们要恒切祷告,在此警醒感恩。
”这不就是在告诉你,祷告就像吃饭一样重要,要一直坚持呀!就好像你每天都要吃饭来维持生命,祷告也是在维持你精神上的力量呢!你想想看,要是你几天不吃饭会咋样?那祷告也是一样的道理呀!第三节说,“同时也要为我们祷告,求神给我们开传道的门,能以讲基督的奥秘。
”这就好像是一个伙伴拜托你,嘿,帮我祷告祷告,让我有机会去讲讲那些神奇的奥秘呀!比如说,你的朋友要去参加一个比赛,他让你帮他祷告,希望能顺利通过,不就是这种感觉嘛!第四节,“叫我按着所该说的话将这奥秘发明出来。
”哇哦,这就好像是你有一个超级大秘密,你得小心翼翼地、一点一点地把它说出来,还得说得恰到好处,不能说错了。
第五节,“你们要爱惜光阴,用智慧与外人交往。
”哎呀呀,时间多宝贵呀,就像金子一样!你得好好利用,不能浪费呀!和别人交往的时候也要聪明点,别傻乎乎的。
比如说,你不会把时间浪费在和那些总是带给你负能量的人在一起,对吧?第六节,“你们的言语要常常带着和气,好像用盐调和,就可知道该怎样回答各人。
”这就好像做菜要放盐一样,说话也要带着和气呀!你可不想说话像没放盐的菜一样没味道,甚至让人觉得难吃吧!歌罗西 4 章就是在告诉我们这些道理呀,要公平对待别人,要恒切祷告,要互相帮助祷告,要珍惜时间,要好好说话。
我觉得这些都是超级重要的呢!我们在生活中就得这么做呀,这样才能让我们的生活更美好,更有意义呀!这就是我对歌罗西 4 章的理解,你呢,是不是也有同感呀?。
地图学新第4章地图概括
5.开方根规律
德国特普费尔提出了一种地图概括的方案,用于解决原始地图与新编 地图由于比例尺的变换而产生的地物数量递减问题。他认为:原始地图与 新编地图两种比例尺分母之比的开放根,便是新编地图所应选取的地物数 量。即:
地图学新第4章地图概括
2.删除的指标定额 定额指标是按成图上单位面积的选取 个数确定的。 定额指标产生于地图规范或根据开方根规律 的计算。
例如:1:50万地形图规定稠密地区居民点的选取定额为 130∼160个/100cm2;稀疏地区居民点的选取定额为70∼100 个/100cm2 ,这种点的删除同样适用于湖泊群或岛屿群。
地图学新第4章地图概括
4.形状的简化基本要求是: (1)保持轮廓图形和弯曲形状的基本特征; (2)保持弯曲转折点的相对精确度; (3)保持不同地段弯曲程度的对比。
地图学新第4章地图概括
保证形状具有相似性的简化方法: • 按最小尺寸限定弯曲的取舍
编稿地图上地物轮廓的宽度和深度分别为Wi 和di , Wi>=W ,di>=d 时一般应选取;
例尺限定了制图区域的幅面,限制了图上能表示要素的总 量,因而也决定了要素数量指标的选取。
1km2的实地面积对应1:5万、1:25万、1:150万地图 上的图面面积
地图比例尺的变更,也制约着图上地物的质量特征。 大比例尺地图上和小比例尺地图上的河流特征表达
地图学新第4章地图概括
3.制图区域的地理特征 不同区域具有景物各异的地理特征。例如我国江南水网地
地图学新第4章地图概括
3.夸张 • 可定义为提高或强调符号的重要特征。它与编图的目的和用途密切相
关,并充分体现在地图设计过程中。 • 地图从设计图例开始便采用了夸张的方法。(1:100万地图上30米公
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
能确定 、 和 分就能求出[m]、[c]和[k]。下面我们以图 6.1 所示的三自由度系统为例, 讨论用影响系数法来求这些影晌系数。
1. 刚度影响系数 的确定 刚度影响系数 b 的确定方法是:使系统的j坐标产生单位位移 x 1 ,而其它各点的位 移均为零时,在第 i 坐标上所需施加的力。例如,在图 4.1 中, 表示使质量 产生单位
式中,
mx kx 0
00
0
0
00
100 010 001
0 代入(4.15)得系统的特征值问题:
0
3 10
12 1
0 13
3 10 12 1 0 13
故系统的特征方程为
3 2
0
100
0
010
0
001
0
0 0
3
将上式展开并整理得
8
19
解上面的方程得系统的三个固有频率:
12
0
3
,
,
2
将第一阶固有频率讲。代入系统的特征值问题的方程中,得
0
(4.9)
若系统的自由度数为 n.则位移列阵 、速度列阵 、加速度列阵 以及干扰力列阵
P 均为 n 阶列阵。而质量矩阵[m]、阻尼矩阵[c]和刚度矩阵[k]均为 n 阶对称方阵。值得注
意的是:当我们将弹性体离散成有限自由度系统时,得到的质量矩阵不一定都是对角阵。因
此,以后我们按质量矩阵为一般非对角阵来讨论。
在多自由度系统中,各阶主振型之间存在着正交性。这是多自由度系统的一个十分重要 的性质。下面我们通过研究多自由度系统任意两组主振型之间的关系来证明这一性质。
设对应于两个固有频率 和 的两阶主振型为 和 ,它们分别满足下列关系 式(见 4 .15 式):
(4.24) (4.25)
以
T左乘(4.24)式的两端,而以
图 4.2 具有三个集中质量简支梁 解:以三个集中质量 , , 离开其静平衡位置的垂直位移 , , 为系统的广义 坐标(见图 4.2a)。由材料力学知,当简支粱受 P 力作用时,其挠度计算公式为(如图 4.2b)
6
,0
, 6
根据柔度影响系数的定义,我们先在坐标 处作用一单位力,则在 , , 处所产生 的挠度即分别为 , , (见图 4.2c)。再在坐标 处作用一单位力,则在 , , 处所 产生的挠度即分别为 , , (见图 4.2d),最后在坐标 y3 处作用一单位力,则在
式 (4 .15)的特征值。各特征值对应的固有频率按由小到大排列:
0
(4.19)
4.2.2 主振型
在求得系统的各阶的固有频率后,将其中某一阶固有频率 式中,并加以展开,得
代回到主振型方程(4.15)
0
0
(4.20)
0
显然,上式是由 n 个齐次代数方程所组成的方程组。因此,从中只能求出 n 个未知量
之间的比值,而无法得到 的确定解。现在,我们将方程组(4.20)中划去其中不独立的某
, , 处所产生的挠度即分别为 , , (见图 4.2e)。 由挠度计算公式可以求出各柔度影响系数的数值:
9 768
11 768
7 768
16 768 故系统的柔度矩阵为
9 11 7 11 16 11 7 11 9
求出系统的柔度矩阵后,由(4 .11)式即可直接写出来系统的运动位移方程式:
9 11 7
同样可以求出
,
,
0,
0
,
0,
0
4. 柔度影响系数和柔度矩阵
上面讨论的应用剐度矩阵来建立系统运动的作用力方程,对于许多振动系统足方便的。
但对于静定系统,有时采用系统运动的位移方程则更为简便而易于求解。为此我们引入一个
新的参数——柔度影响系数 。其定义是在系统的 J 坐标作用一个单位力,而其余各点均无 作用力时,在系统 t 点所产生的位移。柔度矩阵的形式如下:
, ,…,
(4.22)
若将系统的各阶固有频率依次代入(6.15)式,即可得到系统的第一阶、第二阶、……第 n 阶主振型:
, ,…,
, ,…,
…………………………
, ,…,
(4.23)
可见,n 自由度的系统就有 n 个固有频率和 n 个相应的主振型。在数学上把这种性质称
为对应于每一个特征值叫ω ,具有某一个特征向量 。在计算主振型时,要规定其中某
一坐标的振幅的数值。例如,
0,则可规定
1。然后再根据(4.21)式来确定用 表
示的其余 n -1 个坐标的振幅值。
例 2 如图 4. 3 所示的三自由度系统,已知m m m m, k k 2k, k k
k。试计算此系统的固有频率和主振型。
图 4.3 三自由度系统及其振型 解 取质量m 、m 、m 各自偏离平衡位置的位移x 、x 、x 为广义坐标,则该系统的 运动方程为
2. 阻尼影响系数c 的确定
阻尼影响系数c 的确定方法是:使系统的 j 坐标产生单位速度 x 1 ,而其它各点的
速度均为零时,在第 i 坐标上所需施加力的大小。例如,设x 1,即使m 产生单位速度,
而m 及m 速度为零。为了使m 产生单位速度,则必须克服阻尼器c 和c 的阻尼力
c cx
c c 。因此在m 上所需加的作用力为c c ,故c c c 。
4.1.2 影响系数法
从多自由度系统振动方程的矩阵表达式(4. 8)知,若能设法求出系统的质量矩阵[ m]、阻 尼矩阵 c 和刚度矩阵 k 就可以直接写出系统的运动微分方程式。对于n阶多自由度振动系统,
质量矩阵[m]、阻尼矩阵[c]和刚度矩阵[k]的一般形式为
;
上述矩阵中的任一元素 、 和 分别代表第 i 坐标和第 j 坐标之间的惯性、阻尼和 刚度的相互影响,故分别称之为惯性影响系数、阻尼影响系数和刚度影响系数。因此,只要
一项(如最后一式),并将剩下的(n - 1)个方程式中某一相同的 右边,即得到下列代数方程组:
项(如
项)移到等式的
(4 .21)
由(4.21)式,就可以对 , ,…, 求解,求得的 i 1,2, … , n 1 值都是与 成
正比的。这样得到对应与第 r 阶固有频率ω 的 n 个振幅 , ,…, 之间的比例关系, 也就是系统按第 r 阶固有频率振动时各坐标的振幅比。所以,我们把由这 n 个具有确定的相 对比值的振幅组成和列阵称为系统的第 r 阶主振型,即
T左乘(4.25)式的两端,得
(4.26)
将(4.27)式的两端转置得
以(4. 26)式减去(4. 28)式得
当
时,必然有
(4.27)
(4.28)
0
(4.29)
0, 将(4. 30)式代入(4 .26)式得
(4.30)
0,
(4.31)
(4.30)式和(4.31)式表示了任意两个主振型之间的关系。(4.30)式称为主振型对质量矩阵 的正交性,(4. 31)式称为主振型对刚度矩阵的正交性。应当强调指出,主振型的正交关系式 (4. 30)式和(4.31)式,只是在质量矩阵和刚度矩阵为对称时才有效。
最后,从能量的观点来看,多自由度系统的主振型物理意义在于,各阶振动之间的能量 不能传递,彼此是独立的。
4.3 多自由度系统的模态分析法
多自由度系统运动方程是一个二阶常系数线性微分方程组,系统有多少个自由度,方程 组中就有多少个方程。但求解多自由度系统运动方程的困难还不在于方程的数目较多,而在 于各个方程之间有相互关联的耦合项。例如,从前面的讨论中可以看出,质量矩阵[m]都是 对角阵,而刚度矩阵[k]和柔度矩阵[a]却都不是对角矩阵,即出现了耦合项,这类耦合称为 弹性耦合。在某些情况下,系统的质量矩阵也会成为非对角阵,这类耦合称为惯性耦合。因 此求解多自由度运动方程时,就不能应用解单自由度和两自由度系统运动方程时所采用的一 般方法。
3
0
0
2
0
0
3
0
解上述方程组并令
1,则有
同理可求出:
1,
0,
1,
1,
1
所以,对应于三个固有频率 , ,
为
2,
1。
1,
叫系统的第一阶、第二阶、第三阶主振型列阵
1
1
1
2,
0,
1
1
1
1
各阶主振型的示意图表示在图 4.3 中。从图上可以看出,第二阶主振型中有一个节点, 第三阶主振型中则有两个节点。
4.2.3 主振型的正交性
(4.2)
系统的势能U为
4.3
系统的能量耗散函数为
(4.4) 广义干扰力就是激振力,在这一系统中就是分别作用在各质量上的干扰力P , P , P 。 下面进行简单的数学运算求出拉格朗日方程中的一些偏导数,以质量m 为例:
0将上列Βιβλιοθήκη 式代入(4. 1)式,得到质量m 的振动方程为 (4.5)
类似地可以求出质量m 和m 的振动方程如下: (4.6)
类似地可以得到
,
0
,
,
0,
,
3. 惯性影响系数m 的确定
m 表示使系统自如坐标产生单位加速度(x 1),而其它各点的加速度均为零时,在第
i 坐标上所需施加力的大小。例如,设x 1,x x 0,即使m 产生单位加速度,而m 及
m 加速度为零。要使m 产生单位加速度,则必须对m 施加作用力m x m ,故m m
显然要使 有非零解,则上式中的系数行列式必须为零,即 0
或改写为
(4.14)
(4.15) (4.16)
(4.17)
(4.16)式和(4. 17)式都称为系统的特征方程或频率方程。将其展开后可得到 的 n 次代 数方程:
式中, , ,…, 等系数都是 和 的组合。
0
(4.18)
对于一个 n 个自由度系统,求解其特征方程后,可以得到 的 n 个实根,也就是方程