【Robot】Simulation and Analyses模拟与分析
工业机器人系统的性能分析与模拟

工业机器人系统的性能分析与模拟随着现代工业的不断发展,机器人系统被广泛应用于制造业、物流业、医疗保健等领域。
工业机器人系统是工厂自动化的重要组成部分,无论是机器人的数量还是类型,都在不断地增加和模拟。
为了增强工业机器人系统的效率,降低故障率,提供更为精准的生产和服务,工业机器人系统的性能分析与模拟显得十分重要。
工业机器人系统包括机械结构、传感器与执行机构、电气控制系统、软件系统等多个方面,需要进行综合性的性能分析与模拟。
下面将从几个方面进行探讨。
机械结构分析与模拟机械结构是工业机器人系统的基础,直接关系到机器人的精度和效率。
机械结构分析涉及到机器人的静态刚度、动态特性、静态与动态精度、振动、热变形等。
传统的机械结构分析方法是基于理论分析和试验方程模型计算。
但由于机器人系统的复杂性和非线性特性,这种方法对理论假设的精度要求很高,计算复杂度高,非常耗时间和精力。
因此,近年来,基于仿真分析的机械结构分析方法受到了广泛关注。
仿真分析可对机械结构中各种因素的影响进行有效研究,包括元器件的性能、材料的特性、结构的设计等。
通常采用有限元分析方法,建立数学模型模拟机器人的各种机械特性。
根据物理现象和数字模拟的结果,对机器人的结构进行优化,提高机器人的性能和效率。
传感器与执行机构分析与模拟传感器与执行机构是机器人系统的感知和执行端点。
传感器可感知到机器人的位置和力量,执行机构可将计算机信号转化为机器人的动作和行为。
传感器和执行机构的准确性、精度和稳定性是机器人的关键因素。
因此,对传感器与执行机构的性能分析与模拟显得非常重要。
传统的传感器与执行机构测试方法是使用实验室设备对其性能进行测试,并将实验数据与理论值进行比较。
但是,这种方法通常难以完全模拟实际工业机器人的工作环境。
因此,基于仿真模拟的分析方法成为了一种研究手段。
仿真方法可以建立数字模型模拟传感器与执行机构的特性与反应。
根据模拟的结果, 可判断传感器与执行机构的故障原因以及探测到的数据是否有效。
工业机械手运动分析与仿真论文
本科毕业设计(论文)工业机械手的运动分析与仿真(kinematics analysis and simulation of the industrial robot)摘要近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。
我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
典型的工业机器人例如焊接机器人、喷漆机器人、装配机器人等大多是固定在生产线或加工设备旁边作业的,本论文在参考大量文献资料的基础上,结合项目的要求,设计了一种小型的、固定在AGV上以实现移动的六自由度串联机器人。
首先,针对机器人的设计要求提出了多个方案,对其进行分析比较,选择其中最优的方案进行了结构设计;同时进行了运动学分析,用D一H方法建立了坐标变换矩阵,推算了运动方程的正、逆解;用矢量积法推导了速度雅可比矩阵,并计算了包括腕点在内的一些点的位移和速度;然后借助坐标变换矩阵进行工作空间分析。
这些工作为移动式机器人的结构设计、动力学分析和运动控制提供了依据。
在Pro/E中完成6自由度机械手及其手爪的三维造型和装配,将模型导入ADAMS 中,并进行运动学仿真,得到机械手各个部位的速度、加速度、角速度、角加速度在X、Y和Z方向上随时间变化的曲线图。
最后用ADAMS软件进行了机器人手臂的运动学仿真,并对其结果进行了分析,对在机械设计中使用虚拟样机技术做了尝试,积累了经验。
关键词:机器人;建模;运动学分析;反解;仿真ABSTRACTIn the Past twenty years,the robot technology has been developed greatly and used inmany different fields. There is a large gap between our country and the developed countries in research and application of the robot technology so that there will be a great value to study,design and applied different kinds of robots,especially industrial robots.Most typical industrial robots such as welding robot,painting robot and assembly robot are all fixed on the product line or near the machining equipment when they are working. Based on larger number of relative literatures and combined with the need of project,the author have designed a kind of small一size serial robot with 6 degree of freedom which can be fixed on the AGV to construct a mobile robot.First of all,several kinds of schemes were proposed according to the design demand. The best scheme was chosen after analysis and comparing and the structure was designed. At same time,The kinematics analysis was conducted,coordinate transformation matrix using D一H method was set up,and the kinematics equation direct solution and inverse solution was deduced,the matrix was constructed using vector product method,and the values displacement and velocity of some special point including the wrist point were calculated. Secondly,the working space of the robot was analyzed and the axes section of practical working space was drawn. These works provided a basis to structure design, kinematics and control.In the Pro / E do the completion of six degrees of freedom manipulator’s and gripper’s three-dimensional modeling and assembly. models will be imported in ADAMS, and do the simulation and kinematics. Gain the speed, acceleration, velocity, angle acceleration of it’s various parts in the X, Y and Z direction over time the curve.At last, the robot arm′s kinematics was simulated by using software ADAMS,and the simulation result was analyzed. In the experiment,the author tried to use the virtual prototyping technology in mechanism design.Keywords:Robot; modeling; Kinematics Analysis; reverse kinematics; simulation目录中文摘要 (3)英文摘要 (4)第1章绪论 (8)1.1我国机器人研究现状 (8)1.2工业机器人概述 (8)1.3本论文研究的主要内容 (9)第2章机器人方案的创成和机械结构的设计 (10)2.1机器人机械设计的特点 (10)2.2与机器人有关的概念 (11)2.3方案设计 (12)2.3.1方案要求 (12)2.3.2方案功能设计与分析 (13)2.4方案结构设计与分析 (14)第3章运动学分析 (15)3.1概述 (15)3.2运动学分析 (15)3.2.1空间机构中两任意坐标系的变换关系 (15)3.2.2在各运动关节上建立坐标系 (16)3.2.3确定各杆件的结构参数和运动变量 (17)3.2.4写出相邻两构件坐标系间的位姿矩阵 (17)3.3运用Matlab编程进行机械手的模拟运动 (18)3.4运动学方程的逆解 (20)3.3确定机械手的工作空间 (22)第4章机械手的建模与仿真 (24)4.1机械手的总体设计 (24)4.11 三维建模软件Pro/E的介绍 (24)4.12 PRO/E 建模 (24)4.2 运用ADAMS对模型进行仿真 (31)4.21虚拟样机技术概述 (31)4.2.2 导入ADAMS仿真前的步骤 (32)4.2.3运用ADAMS对机械手进行仿真 (37)4.2.4用ADAMS仿真后处理 (39)第5章总结 (40)致谢 (41)参考文献 (42)附录:1、外文资料2、中文翻译另附:机械手装配图及机械手腕装配图第1章绪论1.1我国机器人研究现状机器人是一种能够进行编程,并在自动控制下执行某种操作或移动作业任务的机械装置。
基于MATLAB的六自由度工业机器人运动分析和仿真
基于MATLAB的六⾃由度⼯业机器⼈运动分析和仿真基于MATLAB 的六⾃由度⼯业机器⼈运动分析及仿真摘要:以FANUC ARC mate100⼯业机器⼈为研究对象,对其机构和连杆参数进⾏分析,采⽤D-H 法对机器⼈进⾏正运动学和逆运动学分析,建⽴运动学⽅程。
在MATLAB 环境下,运⽤机器⼈⼯具箱进⾏建模仿真,仿真结果证明了所建⽴的运动学正、逆解模型的合理性和正确性。
关键词:FANUC ARC mate100⼯业机器⼈; 运动学; MATLAB 建模仿真 1引⾔⼯业机器⼈技术是在控制⼯程、⼈⼯智能、计算机科学和机构学等多种学科的基础上发展起来的⼀种综合性技术。
经过多年的发展,该项技术已经取得了实质性的进步[1]。
⼯业机器⼈的发展⽔平随着科技的进步和⼯业⾃动化的需求有了很⼤的提⾼,同时⼯业机器⼈技术也得到了进⼀步的完善。
⼯业机器⼈的运动学分析主要是通过⼯业机器⼈各个连杆和机构参数,以确定末端执⾏器的位姿。
⼯业机器⼈的运动学分析包括正运动学分析和逆运动学分析。
随着对焊接件要求的提⾼,弧焊等机器⼈的需求越来越多。
本⽂就以FANUC ARC mate100机器⼈为研究对象,通过分析机构和连杆参数,运⽤D-H 参数法建⽴坐标系,求出连杆之间的位姿矩阵,建⽴⼯业机器⼈运动学⽅程。
并在MATLAB 环境下,利⽤RoboticsToolbox 进⾏建模仿真。
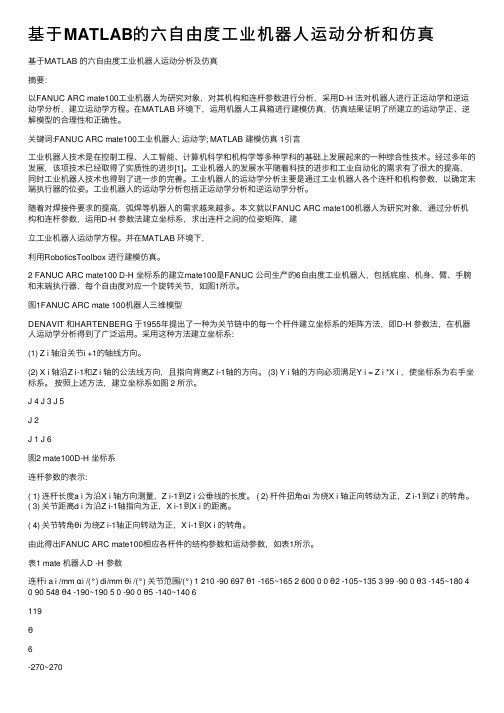
2 FANUC ARC mate100 D-H 坐标系的建⽴mate100是FANUC 公司⽣产的6⾃由度⼯业机器⼈,包括底座、机⾝、臂、⼿腕和末端执⾏器,每个⾃由度对应⼀个旋转关节,如图1所⽰。
图1FANUC ARC mate 100机器⼈三维模型DENAVIT 和HARTENBERG 于1955年提出了⼀种为关节链中的每⼀个杆件建⽴坐标系的矩阵⽅法,即D-H 参数法,在机器⼈运动学分析得到了⼴泛运⽤。
采⽤这种⽅法建⽴坐标系:(1) Z i 轴沿关节i +1的轴线⽅向。
【Robot中英对照说明书】What's New in Autodesk Robot Structural Analysis Professional 2021
【Robot中英对照说明书】What's New in Autodesk Robot Structural AnalysisProfessional 2021 【Robot中英对照说明书】What's New in Autodesk Robot Structural AnalysisProfessional 2021Autodesk Robot Structural Analysis Professional 2021的新增功能Here is the list of improvements in Autodesk Robot Structural AnalysisProfessional 2021.以下是Autodesk Robot Structural Analysis Professional 2021中的改进列表。
Steel Design Code Updates. The following new code regulations have beenimplemented:钢结构设计规范更新。
已实施以下新法规:Australia Code: AS 4100-1998 Rec.2016澳大利亚规范:AS 4100-1998 Rec.2016New Zealand Code: NZS 3404:1997新西兰代码:NZS 3404:1997South Africa Code: SANS 10162-1:2011南非代码:SANS 10162-1:2011These new code regulations can be specified in the Job preferences dialogunder the Steel/Aluminum structures option of Design Codes. See Design Codes.可以在“设计代码”的“钢/铝结构”选项下的“工作首选项”对话框中指定这些新的代码规则。
机器人的运动学分析与模拟外文文献翻译、中英文翻译、外文翻译

附录一:机器人的运动学分析与模拟文摘:常见的方法,比如Denavit-Hartenberg方法,不能简单地用在特殊的机器人的运动分析与混合铰链很难获得这种方法的主要参数。
因此,齐次变换理论来解决这个问题。
首先,这种特殊结构的运动学特征分析的基础上闭链理论。
在这样一个理论,闭链可以转换开连锁店,这使得它更容易分析这种结构。
因此,它将成为更容易建立运动学方程,得到解决方案。
然后,机器人模型可以建立Simmechanics与这些方程的解决方案。
有必要设计一个机器人仿真的图形用户界面。
之后,真正模型机器人和机器人将分别转移到一些空间点在同样的条件下。
最后,所有数据将验证基于运动分析对比数据从模拟和真实的机器人。
关键字:混合铰链结构,齐次变换,运动学分析,运动学仿真1 介绍通常,我们使用Denavit-Hartenberg(d - h)方法来分析机器人的运动学。
该方法的关键是建立一组d - h参数标明所有关节的坐标系的关系[1]。
有很多研究串行链工业机器人,但是很少有研究在这样的工业机器人复杂的结构。
例如,一种混合的大型通用工业机器人的铰链结构允许其在低能耗手臂向后移动。
这个机器人的运动规律不同于其他机器人和d - h参数不能确定。
提出了两个解决方案来处理这个特殊的结构。
一是将结构转换为等效连续关节(关节转动或棱镜)。
然后我们可以决定一个接一个的d - h参数基于d - h理论[2]。
另一种是将闭链开连锁店,这样我们才能计算主动和被动关节之间的关系。
然后,复杂结构转化为简单的串行结构[3]。
第一种方法需要分析每一个共同的特点在这个混合的铰链,因此它是复杂和容易出错的[4]。
同时,在第二个方法中,虽然一般理论分析介绍了所有封闭的链,分解结构不提出这个理论并不是由实验验证。
考虑这两个方法,这将是容易确定关节的坐标系之间的关系如果我们知道的运动学特征的特殊结构。
因此分析了特殊结构的运动特征基于封闭的开链理论。
然后直接坐标系统建立在每个活动关节。
六自由度工业机器人虚拟设计及仿真分析
六自由度工业机器人虚拟设计及仿真分析六自由度工业机器人虚拟设计及仿真分析近年来,随着工业的快速发展,机器人已成为许多生产厂家的重要生产工具。
特别是六自由度工业机器人,其具有高度的灵活性和广泛的适用性,已经在许多领域得到了广泛的应用。
为了满足不同应用场景的需求,并提高机器人的性能和精度,虚拟设计与仿真成为了必不可少的技术手段。
六自由度工业机器人是指拥有六个独立运动自由度的机器人。
这六个自由度分别为三个旋转自由度和三个平移自由度。
通过灵活地控制这些自由度,机器人可以实现在三维空间内的无序复杂任务,如装配、搬运、焊接等。
然而,设计和优化这样一个复杂的机器人系统并不是一件容易的事情。
传统的实物设计和试错方法耗时耗力,并且难以满足设计师对机器人性能的要求。
因此,虚拟设计及仿真成为了一种必要的手段。
虚拟设计是指利用计算机建模和仿真技术,通过虚拟环境模拟和预测机器人的运动、力学和控制特性。
首先,设计者可以通过CAD软件对机器人进行三维建模,包括机器人的机械结构、关节和驱动系统等。
然后,根据机器人的工作场景和任务需求,设计者可以设置机器人的路径和动作,并模拟机器人在现实环境中的运动。
通过虚拟设计,设计者可以进行多次模拟和实验,预先检查机器人的性能,并进行必要的改进和优化。
仿真分析是指通过数值计算和模拟,对机器人的运动、力学和控制性能进行评估和分析。
在仿真分析中,设计者可以根据机器人的运动学学关系和动力学模型,计算出机器人各关节和末端执行器的位姿、速度和力矩等。
通过对这些关键参数的分析,能够更好地理解机器人的工作原理,并进行性能优化和故障诊断。
此外,仿真分析还可以帮助设计者评估机器人系统的稳定性、刚度和振动等性能指标。
虚拟设计及仿真在六自由度工业机器人的设计和优化中发挥着重要作用。
首先,虚拟设计和仿真可以提高设计效率和准确性。
相比传统的实物设计和试验方法,虚拟设计可以节省大量的时间和费用,并且可以在设计的早期阶段检测和解决潜在的问题。
机器人运动学建模与动力学仿真分析
机器人运动学建模与动力学仿真分析机器人一直以来是人类最喜欢的机械产物之一。
它们已经在许多领域中得到了广泛应用,从工业生产到医疗,从军事到普通家庭,都有机器人的身影。
然而,机器人的行为不可能只受简单的人工指令控制,在设计和创建机器人时,必须考虑它们如何使用传感器和算法自主进行运动控制。
这就需要对机器人进行运动学建模和动力学仿真分析。
机器人的运动学模型描述了机器人的位置和方向,以及机器人在三维空间中运动的方式。
运动学模型通常由连接在一起的“关节”组成,每个关节提供机器人在空间中运动的自由度。
一个典型的机器人通常由多个关节组成,在每个关节处都有一个旋转或平移关节。
关节的旋转和平移由马达或气动驱动器等装置控制,以允许机器人进行复杂运动,从而能完成其指定的任务。
机器人的运动学模型可以用数学的方法来表示,其中一个广为人知的方法是丹尼·德文波特的变换题。
这个题的思想是将机器人从其基本位置(被定义为零位)旋转和移动,函数将这个位置映射到全局坐标系统中。
对于机器人中每个关节,将“关节空间”中的变化转换为“工作空间”中的直线和角度转换,从而得到机器人的整体位置和方向。
机器人的动力学模型描述了运动学之外的一些物理特性,如质量、惯性、摩擦力等,从而解释与力学和动力学相关的运动。
这是在机器人仿真系统中进行动力学仿真分析的关键所在之一。
通常情况下,机器人的惯性和摩擦力对动力学非常重要,它们直接影响机器人的运动和位移。
在设计机器人时,考虑这些因素是至关重要的,否则机器人可能会无法完全精确地执行指定的任务。
了解机器人的运动学和动力学模型有许多好处。
首先,它们可以帮助设计师更好地理解机器人的基本运动和设计风格。
其次,运动学和动力学模型也可以用于控制机器人的运动。
例如,运动学模型可以将圆轴坐标转换为笛卡尔坐标,并为控制器提供所需的坐标信息,以使机器人在空间中移动。
同时,动力学模型可以帮助设计师制定适当的控制器 PID(位置、积分、微分)参数,以保证机器人的稳定性和运动精度。
机器人运动学分析与仿真实现
机器人运动学分析与仿真实现在当今科技飞速发展的时代,机器人技术的应用越来越广泛,从工业生产中的自动化装配线,到医疗领域的手术机器人,再到家庭服务中的智能机器人,机器人已经逐渐融入到我们生活的方方面面。
而机器人运动学作为机器人技术的重要基础,对于机器人的设计、控制和应用具有至关重要的意义。
本文将对机器人运动学进行分析,并探讨其仿真实现的方法和过程。
一、机器人运动学的基本概念机器人运动学主要研究机器人各关节的运动与机器人末端执行器位姿之间的关系。
简单来说,就是如何通过控制机器人的关节角度或位移,来实现期望的末端执行器的位置和姿态。
机器人运动学可以分为正运动学和逆运动学两个方面。
正运动学是已知机器人各关节的参数(如关节角度、长度等),求解末端执行器在空间中的位置和姿态。
这就好比我们知道了一个人的各个肢体的长度和关节的转动角度,就能推算出他的手能够到达的位置。
逆运动学则是已知末端执行器的期望位置和姿态,求解各关节应有的参数值。
这相当于我们给定了一个目标位置,需要反过来计算出各个肢体应该如何运动才能达到这个目标。
二、机器人运动学模型的建立为了进行机器人运动学的分析,首先需要建立机器人的运动学模型。
常见的机器人模型有串联机器人和并联机器人。
串联机器人是由一系列关节依次连接而成,每个关节只有一个自由度;并联机器人则是由多个支链并行连接到动平台和静平台之间,具有多个自由度。
在建立模型时,需要确定机器人的连杆参数,包括连杆长度、连杆扭转角、关节偏移量和关节转角等。
这些参数通常可以通过机器人的机械结构设计图纸或实际测量得到。
以一个简单的平面两关节机器人为例,我们可以将其看作是两个连杆通过关节连接在一起。
设第一个连杆的长度为$l_1$,第二个连杆的长度为$l_2$,关节 1 的转角为$\theta_1$,关节 2 的转角为$\theta_2$。
通过三角函数的关系,可以得到末端执行器在平面坐标系中的位置坐标$(x, y)$与关节角度$\theta_1$ 和$\theta_2$ 之间的关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Simulation and Analyses模拟与分析Wind load simulation and automatic generation of wind loads风荷载模拟与风荷载自动生成You can either run the simulation directly in Robot, or you can export your structure to Autodesk Simulation CFD if the program is installed on your machine.可以直接在Robot中运行仿真,也可以将结构导出到Autodesk simulation CFD (如果计算机上安装了程序)。
The Wind loads simulation feature allows you to simulate a wind flow around your structure, and to generate wind loads automatically.“风荷载模拟”功能允许您模拟结构周围的风流,并自动生成风荷载。
This feature is especially useful with structures that have a complicated geometry, and for which it is usually difficult to define the right wind loads. The wind simulation acts as a wind tunnel, and displays colored pressure maps on the model in order to visualize and understand the effects of the wind.对于几何结构复杂且通常难以定义正确风荷载的结构,此功能尤其有用。
风模拟充当风洞,并在模型上显示彩色压力图,以便可视化和了解风的影响。
The results of this simulation can be used for further analyses, or to verify a typical approach based on specific codes.仿真结果可用于进一步分析,或验证基于特定代码的典型方法。
Several wind parameters are available such as the wind direction, wind velocity, and wind pressure. The ground level, and elements exposed to the wind can also be specified.有几个风参数可用,例如风向、风速和风压。
还可以指定地面标高和暴露在风中的构件。
To run a wind load simulation, click Loads Wind Loads simulation Generate wind loads.要运行风荷载模拟,请单击“荷载”“风荷载”“模拟”“生成风荷载”。
See Generate Wind Loads Automatically.请参见自动生成风荷载。
To perform an advanced fluid analysis with Autodesk Simulation CFD, click Loads Wind Loads simulation Simulation CFD.要使用Autodesk Simulation CFD执行高级流体分析,请单击“载荷”“风载荷”“仿真”“CFD”。
Note: Autodesk Simulation CFD must be installed on your machine.注意:您的计算机上必须安装Autodesk Simulation CFD。
See Export the model to Autodesk Simulation CFD.请参见将模型导出到Autodesk Simulation CFD。
Direct Analysis Method - A new approach to stability design直接分析法——一种新的稳定性设计方法The Direct Analysis Method for steel frame structures is a new AISC approach for the stability design which requires:钢框架结构直接分析法是AISC稳定设计的一种新方法,要求:The addition of notional forces to the load combinations,向荷载组合添加名义力,The reduction of the member stiffness,构件刚度的减小,P-delta local effects for the P-DELTA analysis.P-delta局部效应分析。
Robot uses the Direct Analysis Method in conjunction with detailed option settings to generate a supplementary model in which all the previously stated modifications are made automatically. In addition to the standard AISC approach, it is also possible to use customized parameters for the DAM model.Robot使用直接分析方法和详细的选项设置来生成一个补充模型,在该模型中,所有先前声明的修改都是自动进行的。
除了标准的AISC方法外,还可以为大坝模型使用自定义参数。
It is possible to work simultaneously with the original model and the DAM model by selecting either model at any time. When steel member design is executed from the original model, it uses the results from the appropriate model automatically.通过在任何时候选择其中一个模型,可以同时使用原始模型和大坝模型。
当从原始模型进行钢构件设计时,它会自动使用相应模型的结果。
The primary benefit of this approach is the possibility to check the section capacity during the design phase, without using effective lengths or amplified moments.这种方法的主要优点是可以在设计阶段检查截面承载力,而不使用有效长度或放大力矩。
A DAM analysis can be performed on any 3D model for which ULS combinations have been defined.大坝分析可以在任何已定义ULS组合的3D模型上进行。
To set up a DAM analysis, click Analysis Analysis Types, and then select Direct Analysis Method.要设置水坝分析,请单击“分析分析类型”,然后选择“直接分析方法”。
Note: The Direct Analysis Method currently supports the use of the static seismic approach as defined in the following codes; ASCE 7-10, IBC 2012, NBCC 2010, AS 1170-4:2007. Support for the spectral seismic approach is planned for future versions of this feature. Please be aware that usage of non-static load cases will be reported to the user, and will not be accounted for in the creation of load cases for evaluation at this time.注:直接分析法目前支持使用以下规范中定义的静态地震法;ASCE 7-10,IBC 2012,NBCC 2010,as 1170-4:2007。
计划在该功能的未来版本中支持频谱地震方法。
请注意,非静态负载情况的使用情况将报告给用户,并且此时不会在创建负载案例以供评估时考虑。
See Run a DAM analysis.请参见运行水坝分析。
Block Lanczos algorithm for dynamic calculations动态计算的块Lanczos算法The block Lanczos algorithm increases the speed of dynamic calculations compared to the standard Lanczos approach. This algorithm is especially useful for large models.与标准Lanczos方法相比,块Lanczos算法提高了动态计算的速度。
这种算法特别适用于大型模型。
To access the block Lanczos option, select a modal analysis type, and then click Advanced parameters in the Modal analysis Parameters dialog.要访问“块Lanczos”选项,请选择一种模态分析类型,然后单击“模态分析参数”对话框中的“高级参数”。
See Modal Analysis Parameters.请参见模态分析参数。
Improved bi-directional model data exchange between Autodesk Revit Structure and Robot.改进了Autodesk Revit Structure和Robot之间的双向模型数据交换。