形位公差之定向定位公差详解
形位公差详解 含图片说明
形位公差的分类介绍 线轮廓度
采用线轮廓度首先 必须将其理想轮廓 线标注出来,因为 公差带形状与之有 关。 理想线轮廓到底面 位置由尺寸公差控 制,则线轮廓度公 差带将可在尺寸公 差带内上下平动及 摆动。
公差带形状为两等距曲线
形位公差的分类介绍 面轮廓度
面轮廓度:限制实际曲面对理想曲面变动量的一项 指标
公差带形状为两等距曲面
形位公差的分类介绍 面轮廓度(复合轮廓度,美国ASME新标准)
可 在 尺 寸 公 差 内 平 动 和 摆 动
在 尺 寸 公 差 内
只 能 上 下 平 动
我国GB标准尙未放入此标注形式。因可用25±0.25来等效替代上格。
形位公差的分类介绍 平行度
平面度:两平面或者两直线平行的误差最大允许值 实际应用:
轴线直线度公差 0.5 0. 75 …… 1
0.5 M
图 78
公差原则
示例(用公差带图解释)
最大实体 原则M
最大实体要求(轴)
19.7 - 20
0.4
0.1 - 0.3 0 +0.1 尺寸
0.1 M
LMS = 19.7
Hale Waihona Puke MMS = 20 MMVS = MMS + t = 20 + 0.1 = 20.1
.
形位公差的定义
定义
形状公差和位置公差简称为形位公差 形状公差:形状公差是指单一实际要素的形状所 允许的变动全量;形状公差标注无基准
要素是指零件上的特征部分 — 点、线、面 实际要素 Real Feature — 零件加工后实际存在的要素(存在误差)
位置公差:位置公差是关联实际要素的位置对基 准所允许的变动全量;位置公差标注一般需有基 准
形位公差详解

在图21中可发现该 盘类零件的基准框格采 用了三格,这是因为该 零件对基准轴线V有方 向要求。而从定位原理 上讲基准 U、V 已构成 了基准体系。 基准W是一个辅助 基准平面(不属于基准 体系)。
GM标 准也可不 加圆,而 在框格下 标注 ALL AROUND 来表示。 图例在面 轮廓度公 差带介绍 中。 图 10 GM标准将面轮廓度定义为位置公差,使用又广,故有些特殊的标
注规定,在后面介绍面轮廓度公差时再讲述。
d) 螺纹、齿轮和花键(两国标准一样) 一般情况下,以螺纹中径轴线作为被测要素或基准要素。如用大 径轴线标注“MAJOR DIA”(MD);用小径轴线标注“MINOR DIA” (LD)。 齿轮和花键轴线作为被测要素或基准要素时,如用节径轴线标注 “PITCH DIA”(PD);用大径轴线标注“MAJOR DIA” (MD), 用 小径轴线标注“MINOR DIA”(LD)。 e) 我国GB标准独有的四个符号(图11) GB标准规定了在公差带内进一步限制被测要素形状的四个符号。
Ø
图 6
Ø
带箭头的指引线可从框格任一方向引出,但不可同时从两端引
出。
3.2.2 GM标准(有四种,且可无带箭头的指引线)
d c a a) 形位公差框 格放于要素的尺寸 或与说明下面; b) 形位公差框 格用带箭头的指引 线与要素相连; c) 把形位公差 框格侧面或端面与 要素的延长线相连 ; d) 把形位公差 框格侧面或端面与 尺寸要素的尺寸线 的延长线相连。 b a 图 7
理想要素 Ideal Feature — 理论正确的要素(无误差)。 在技术制图中我们画出的要素为理想要素。理想轮廓要素用 实线(可见)或虚线(不可见)表示;理想中心要素用点划线表示。
2.4 按结构性能分: 单一要素 Individual Feature — 具有形状公差要求的要素。 关联要素 Related Feature — 与其它要素具有功能关系的要素。 功能关系是指要素间某种确定的方向和位置关系,如垂直、平 行、同轴、对称等。也即具有位置公差要求的要素。 2.5 按与尺寸关系分: 尺寸要素 Feature of Size — 由一定大小的线性尺寸或角度尺寸 确定的几何形状。 尺寸要素可以是圆柱形、球形、两平行对应面、圆锥形或楔形。 非尺寸要素 — 没有大小尺寸的几何形状。 非尺寸要素可以是表面、素线。 上述要素的名称将在后面经常出现,须注意的是一个要素在不 同的场合,它的名称会有不同的称呼。
形位公差讲解讲解
2019/6/9
21
形状和位置公差(几何公差)
二、几何公差的标注方法
被测要素的标注: 公差框格 指引线 项目符号 几何公差值 基准字母
2019/6/9
22
形状和位置公差(几何公差)
二、几何公差的标注方法(GB1182-80)
2019/6/9
23
GB/T 1182-1996
形和位置公差(几何公差)
2019/6/9
17
形状和位置公差(几何公差)
二、几何公差的标注方法
指向被测要素时: 垂直被测要素!
被测要素的标注: 公差框格 指引线 项目符号 几何公差值 基准字母
2019/6/9
18
形状和位置公差(几何公差)
二、几何公差的标注方法
垂直被测要素! 圆锥圆度例外!
被测要素的标注: 公差框格 指引线 项目符号 几何公差值 基准字母
2019/6/9
28
形状和位置公差(几何公差)
二、几何公差的标注方法
几何公差值标注在 被测要素的标注:
公差框格第二格中,以
公差框格
mm 为单位,指被测要素 的允许变动量。
指引线 项目符号
几何公差值
0.01
基准字母
2019/6/9
29
形状和位置公差(几何公差)
二、几何公差的标注方法
被测要素的基准在图样 上用英文大写字母表示,为
被测要素的标注:
了避免混淆和误解,不得采
公差框格
用E、F、I、J、L、M、O、P、 R等9个字母,也不能与向视 图字母重合。
指引线 项目符号
几何公差值
基准字母
多基准时,将最重要的基准放在公差框格第三格中作为 第一基准,依次排列。
公差原则
Ø0.1 M
0.4 0.3 0.1 -0.3 -0.2 Ø19.7 Da/mm
ø20(dM) Ø 20.1(dMV)
最大实体要求应用实例(二)
如图所示,被测轴应满足下列要求: 实际尺寸在ø11.95mm~ø12mm之内; 实际轮廓不得超出关联最大实体实效边界,即关联体外作用尺寸不大 于关联最大实体实效尺寸dMV=dM+t=12+0.04=12.04mm 当被测轴处在最小实体状态时,其轴线对A基准轴线的同轴度误差允 许达到最大值,即等于图样给出的同轴度公差( ø 0.04 )与轴的尺 寸公差(0.05)之和( ø 0.09 )。 0
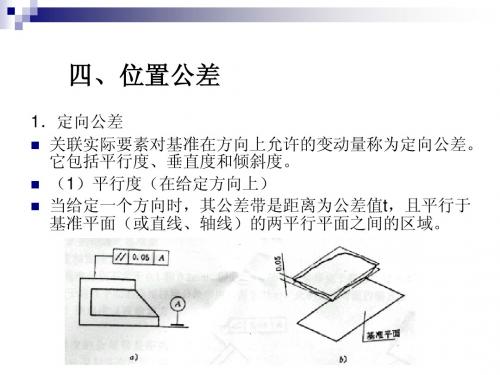
(3)倾斜度(在给定方向上)
倾斜度的公差带是距离为公差值t,且与 基准平面(或直线、轴线)成理论正确 角度的两平行平面(或直线)之间的区 域。
2.定位公差
关联实际要素对基准在位置上允许的变动量称为 定位公差。它包括同轴度、对称度、位置度。 (1)同轴度 同轴度的公差带,是直径为公差值t,且与基准轴 线同轴的圆柱面内的区域。
最大实体要求 轴 孔
dm≤dMMVS=dMMS+t形位 dmin≤da≤dmax Dm≥DMMVS=DMMS-t形位 Dmin≤Da≤Dmax
孔
边界尺寸为最大实体尺寸 MMS(dmax,Dmin)
边界尺寸为最大实体实效尺寸 MMVS=MMS±t
标注
单一要素
在尺寸公差带后 加注 E
用于被测要素 时
在形位公差框格第二格 公差值后加 M
4、最大实体状态(尺寸、边界)
最大实体尺寸(Maximum Material Size, MMS):实际要 素在最大实体状态下的极限尺 寸。 (轴的最大极限尺寸dmax,孔 的最小极限尺寸Dmin) 最大实体边界:尺寸为最大实 体尺寸的边界。
形位公差详解
William Liu Nov.2005形位公差概述1、定义形位公差:是表示零件的形状和其相互间位置的精度要求。
2、形状和位置公差的分类形位公差:☹形状公差:A:直线度;B:平面度;C:圆度;D:圆柱度;E:线轮廓度;F:面轮廓度。
☹位置公差:A:定向公差:a:平行度;b:垂直度c:倾斜度。
B:定位公差:a:同轴度;b:位置度;c:对称度。
C:跳动:a:圆跳动;b:全跳动。
1形狀公差•形状公差的特点:可将其分成两组•1、直线度、平面度、园度、圆柱度:•特点:都是单一要素;没有基准;公差带位置是浮动的;•公差带方向为形位误差安最小区域法所形成的•方向一致。
•2、线轮廓度、面轮廓度:•特点:•1)、当线、面轮廓度是用来控制形状时,它是单一要素,•没有基准,公差带位置是浮动的。
•2)、当线、面轮廓度是用来控制形状和位置时,它是关•联要素,有基准,公差带位置是固定的。
•3)、当线轮廓度是封闭形状时,它是单一要素,没有基准•,公差带位置是固定的。
直線度公差1、定义:直线度是用来限制被测实际直线形状误差的一项指标。
2、平面上的直线度公差带是夹在距离为公差值的两条理想的平行线之间的区域。
0.01f=0.01空間直線度公差3、空间的直线度公差带:是直径为公差值Ф0.04mm的圆柱面内区域。
Ø0.04Ø0.04平面差公差1、定义:平面度是用来限制实际平面形状误差的一项指标。
0.012、平面度公差带:是距离为公差值0.01mm的两平行平面间的区域。
圓度公差0.05f =0.052、公差带是半径差为公差值0.05mm 的两同心园之间区域。
1、定义:圓度是限制回转体的正截面或过球心的任意截面轮廓圓形状误差的一项指标。
圓柱度公差1、定义:圆柱度是综合限制圆柱体正截面和纵截面的圆柱形状误差的一项指标。
0.052、圆柱度公差带:是半径差为公差值0.05mm的两同轴圆柱面之间区域。
1、定义:是限制平面曲线形状误差的一项指标。
[精华]形位公差定义
![[精华]形位公差定义](https://img.taocdn.com/s3/m/033914a19b89680203d825e3.png)
[精华]形位公差定义形状位置公差零件在加工过程中,由于机床,夹具,刀具系统存在几何误差,以及加工中出现受力变形、热变形、振动和磨损等影响,使被加工零件的几何要素不可避免地产生误差。
这些误差包括尺寸偏差、形状误差(包括宏观几何误差、波度和表面粗糙度)及位置误差。
1.形状公差形状公差是指单一实际要素的形状所允许的变动全量。
形状公差用形状公差带表达。
形状公差带包括公差带形状、方向、位置和大小等四要素。
形状公差项目有:直线度、平面度、圆度、圆柱度、线轮廓度、面轮廓度等6项。
2.位置公差位置公差是指关联实际要素的位置对基准所允许的变动全量。
2.1.定向公差定向公差是指关联实际要素对基准在方向上允许的变动全量。
这类公差包括平行度、垂直度、倾斜度3项。
2.2.定位公差定位公差是关联实际要素对基准在位置上允许的变动全量。
这类公差包括同轴度、对称度、位置度3项。
2.3.跳动公差跳动公差是以特定的检测方式为依据而给定的公差项目。
跳动公差可分为圆跳动与全跳动。
零件的形位公差共14项,其中形状公差6个,位置公差8个,列于下表。
分类项目符号简要描述直线度是表示零件上的直线要素实际形状保持理想直线的状况。
也就是通常所说的平直程度。
直线度直线度公差是实际线对理想直线所允许的最大变动量。
也就是在图样上所给定的,用以限制实际线加工误差所允许的变动范围。
平面度是表示零件的平面要素实际形状,保持理想平面的状况。
也就是通常所说的平整程度。
平面度平面度公差是实际表面对平面所允许的最大变动量。
也就是在图样上给定的,用以限制实际表面加工误差所允许的变动范围。
圆度是表示零件上圆的要素实际形状,与其中心保持等距的情况。
即通常所说的圆整程度。
圆度圆度公差是在同一截面上,实际圆对理想圆所允许的最大变动量。
也就是形状图样上给定的,用以限制实际圆的加工误差所允许的变动范围。
公差圆柱度是表示零件上圆柱面外形轮廓上的各点,对其轴线保持等距状况。
圆柱度公差是实际圆柱面对理想圆柱面所允许的最大变动量。
形位公差14种类型,分类后很容易记

形位公差很复杂吗?其实一共14种类型,分类后很容易记如上图,很多企业的面试题里会有考到形位公差的知识,很多人对形位公差熟悉不够,觉得形位公差很复杂,也很乱,种类有多,定义又模糊,根本就记不住,其实形位公差分好类,并没有那么多种,归好类就很容易记了;形位公差分为形状公差和位置公差形位公差一般也叫几何公差,包括形状公差和位置公差。
任何零件都是由点、线、面构成的,这些点、线、面称为要素。
机械加工后零件的实际要素相对于理想要素总有误差,包括形状误差和位置误差。
什么是形状公差,它有哪几种形式形状公差是指单一实际要素的形状所允许的变动量。
是被测要素的几何形状的公差,即几何形状的准确性,不存在对基准的误差,是独立的误差。
通俗点就是,和形状有关的要素。
形状公差:包括直线度、平面度、圆度、圆柱度、线轮廓度、面轮廓度6种。
什么是位置公差,它有哪几种形式位置公差是指关联实际要素的方向或位置对基准所允许的变动全量。
根据关联要素对基准的功能要求,位置公差又分为定向公差、定位公差和跳动公差三类。
位置公差带是限制关联实际要素变动的区域,被测实际要素位于此区域内为合格。
定向公差:包括平行度、垂直度及倾斜度3种。
定位公差:包括同轴度、对称度、和位置度3种。
跳动公差:包括圆跳动与全跳动2种。
综合起来,形位公差的种类一共有14种,其中形状公差6种,位置公差8种(定向3种,定位3种,跳动2种):即形状公差:包括直线度、平面度、圆度、圆柱度、线轮廓度、面轮廓度6种;位置公差又分为定向公差、定位公差和跳动公差三类;定向公差:包括平行度、垂直度及倾斜度3种。
定位公差:包括同轴度、对称度、和位置度3种。
跳动公差:包括圆跳动与全跳动2种。
形位公差之定向定位公差详解

第四章形状和位置公差及检测(第二讲,2学时)※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※本次课内容及时间分配:1.位置公差及基准的概念;2. 定向公差与公差带特点;3. 典型的定向公差带的特征及其标注;4. 定位公差与公差带特点;5. 典型的定位公差带的特征及其标注;6. 小结。
要求深刻理解与熟练掌握的重点内容:本次课内容均要求深刻理解与熟练掌握。
本次课难点:典型的定向和定位公差带的特征及其标注。
本次课教学方法:本次课中,位置公差项目比较多,要有重点的进行讲解。
定向公差以平行度公差带的特征及标注为讲解重点,定位公差带的公差带的特征及其标注要各举一例进行讲解。
设置课堂问题,掌握学生理解情况课外作业:习题:4-9、4-11、4-14※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※具体内容的详细教案如下:(加黑字表示板书内容或应有板书的地方)注:首先对上次课的主要内容用2分钟进行小结。
第三节位置公差注:首先对上次课的主要内容用2分钟进行小结,然后讲新内容。
位置公差——是指关联实际要素的位置对基准所允许的变动全量。
位置公差用以控制位置误差,用位置公差带表示,它是限制关联实际要素变动的区域,被测实际要素位于此区域内为合格,区域的大小由公差值决定。
一、基准基准是确定被测要素的方向、位置的参考对象。
1) 单一基准——如右图所示(见课件)为由一个平面要素建立的基准。
2) 组合基准(公共基准)——用下图(见课件)讲解3) 基准体系(三基面体系)——由三个相互垂直的平面所构成的基准体系,称三基面体系。
注:用教材图4-4讲解三基面体系。
应用三基面体系标注图样时,要特别注意基准的顺序。
二、定向公差与公差带定向公差——是指关联实际要素对基准在方向上允许的变动全量。
定向公差包括平行度、垂直度和倾斜度三项。
根据要素的几何特征及功能要求,定向公差中被测要素相对基准要素为线对线或线对面时,可分为给定一个方向,给定相互垂直的两个方向和任意方向上的三种。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章形状和位置公差及检测(第二讲,2学时)
※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※本次课内容及时间分配:
1.位置公差及基准的概念;
2. 定向公差与公差带特点;
3. 典型的定向公差带的特征及其标注;
4. 定位公差与公差带特点;
5. 典型的定位公差带的特征及其标注;
6. 小结。
要求深刻理解与熟练掌握的重点内容:
本次课内容均要求深刻理解与熟练掌握。
本次课难点:
典型的定向和定位公差带的特征及其标注。
本次课教学方法:
本次课中,位置公差项目比较多,要有重点的进行讲解。
定向公差以平行度公差带的特征及标注为讲解重点,定位公差带的公差带的特征及其标注要各举一例进行讲解。
设置课堂问题,掌握学生理解情况
课外作业:习题:4-9、4-11、4-14
※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※※具体内容的详细教案如下:(加黑字表示板书内容或应有板书的地方)
注:首先对上次课的主要内容用2分钟进行小结。
第三节位置公差
注:首先对上次课的主要内容用2分钟进行小结,然后讲新内容。
位置公差——是指关联实际要素的位置对基准所允许的变动全量。
位置公差用以控制位置误差,用位置公差带表示,它是限制关联实际要素变动的区域,被测实际要素位于此区域内为合格,区域的大小由公差值决定。
一、基准
基准是确定被测要素的方向、位置的参考对象。
1) 单一基准——如右图所示(见课件)为由一个平面要素建立
的基准。
2) 组合基准(公共基准)——用下图(见课件)讲解
3) 基准体系(三基面体系)——由三个相互垂直的平面所构成的基准体系,称三基面体
系。
注:用教材图4-4讲解三基面体系。
应用三基面体系标注图样时,要特别注意基准的顺序。
二、定向公差与公差带
定向公差——是指关联实际要素对基准在方向上允许的变动全量。
定向公差包括平行度、垂直度和倾斜度三项。
根据要素的几何特征及功能要求,定向公差中被测要素相对基准要素为线对线或线对面
时,可分为给定一个方向,给定相互垂直的两个方向和任意方向上的三种。
1.平行度
1)“面对面”的平行度
注:以右图并结合课件中的公差带图说明其公差带的形状、大小、
公差带方向,并说明位置是浮动的;要注意讲清哪个是基准,哪个是被测要素。
2)“线对线”的平行度
(1)一个方向(2)相互垂直的两个方向(2)任意方向
注:以下图(见课件)说明三种情况公差带的形状、大小,并说明公差带方向、位置是
浮动的。
一个方向 相互垂直的两个方向 任意方向
2. 垂直度
当两个要素互相垂直时,用垂直度公差控制被测要素对基准的方向性误差。
注:垂直度公差的分析方法与平行度公差相类似,用下面例子简单讲解。
1)一个方向2)任意方向
一个方向
任意方向
3. 倾斜度
注:用下面例子简单讲解。
1)“面对线”倾斜度2)“线对面”倾斜度(任意方向)
注:以下图(见课件)说明其公差带的形状、大小,并说明公差带方向、位置是浮动的。
B ,
准平面B 的位置被固定下来,即φD 的轴线的理论正确位置距B 基准为 中的值,相当于理论轴线平行于B 基准且距离为 )
定向公差具有如下特点:
1) 定向公差带相对基准有确定的方向,而其位置往往是浮动的。
2) 定向公差带具有综合控制被测要素的方向和形状的功能。
如平面的平行度公差,可以控制该平面的平面度和直线度误差;轴线的垂直度公差可以控制该轴线的直线度误差。
(注:可设置课堂问题)
因此在保证功能要求的前提下,规定了定向公差的要素,一般不再规定形状公差,只有需要对该要素的形状有进一步要求时,则可同时给出形状公差,但其公差数值应小于定向公差值。
(注:以上内容1学时)
三、定位公差与公差带
定位公差——是关联实际要素对基准在位置上允许的变动全量。
它包括同轴度、对称度
和位置度三项。
1.同轴度 (用右图讲解同轴度)(见课件)
2.对称度(用下图讲解同轴度)(见课件)
3.位置度
位置度用于控制被测要素(点、线、面)对基准要素的位置误差。
根据零件的功能要求,位置度公差可分为给定一个方向、给定相互垂直的两个方向和任意方向三种。
后者用得最多。
位置度常用于控制具有孔组零件的各孔轴线的位置度误差。
(注:增加孔组的累积误差问题,可说明位置公差的应用问题)
1)线的位置度(任意方向)2)面的位置度
注:用下图(见课件),讲解其公差带的形状、大小,并说明公差带方向、位置是固定的。
;要讲解为什么要标注三个基准及理论正确尺寸。
A -A
线的位置度 面的位置度
(注:后一个图与前面倾斜度的示例进行比较,可看出定向公差与定位公差的区别) 定位公差带的特点如下:
1) 定位公差相对于基准具有确定位置。
其中,位置度公差带的位置由理论正确尺寸确定,同轴度和对称度的理论正确尺寸为零,图上可省略不注。
2) 定位公差带具有综合控制被测要素位置、方向和形状的功能。
如平面的位置度公差,可以控制该平面的平面度误差和相对于基准的方向误差;同轴度公差可以控制被测轴线的直线度误差和相对于基准轴线的平行度误差。
(注:可设置课堂问题)
在满足使用要求的前提下,对被测要素给出定位公差后,通常对该要素不再给出定向公差和形状公差。
如果需要对方向和形状有进一步要求时,则可另行给出定向或形状公差,但其数值应小于定位公差值。
课时小结(口述)
应小结如下内容:
基准的概念及常用的三种基准(单一基准、组合基准和三基面体系);定向公差与公差带特点;定位公差与公差带的特点;典型的定向和定位公差带的定义、特征以及标注示例中标注的涵义。
同轴度是构造公共轴线,同时要考虑垂直度的要求
位置度在考虑基准时尽量测量三维特征,尽量测量得比较长,避免延伸误差,美国标准里面经常将其他很多公差转换为位置度来计算。
盛年不重来,一日难再晨。
及时宜自勉,岁月不待人。
B A
C C
B φ 0.1 A φ 0.05 A 0.05 B
B A φ。