飞行力学课件1
合集下载
大气飞行力学第1-5章大气紊流

南京航空航天大学空气动力学系
当所考虑的频率范围不是很高时,即大致对应于飞行器 的刚体运动频率(短周期模态频率),而不涉及结构振 动频率时,可进一步把紊流速度场在飞行器质心附近线 性化:
令
南京航空航天大学空气动力学系
4-2紊流的气动等价作用
大气紊流速度的作用实际上就是改变了飞行器上的相 对气流,从而改变了飞行器所受到的气动力或气动力 矩,而这种附加的气动力可通过飞行器运动状态量的 等价改变来表示。 x方向的紊流速度,相当于减小了前进速度(空速)。
南京航空航天大学空气动力学系
3-2 考虑风切变时的纵向运动方程
v = u+ w
气流坐标系为参考系:
几何关系: 角速度分量
空速对水平面 的倾斜角
南京航空航天大学空气动力学系
动力学方程:
展开:
南京航空航天大学空气动力学系
因为:
垂直风速为零,得:
令:
得:
其它方程:
南京航空航天大学空气动力学系
§4 在非平静大气中偏量形式的运动方程
南京航空航天大学空气动力学系
紊流速度梯度:
解释1:在气动效果方面相 当于负的俯仰角速度(图示 速度分布引起抬头力矩, 与飞机下俯时的阻尼力矩 相似,所以图示速度分布 相当于下俯角速度)
解释2:根据相对运动原 理,飞机的相对运动方向 (等价方向)与紊流速度 方向相反。因此,在图示 的紊流速度梯度下,相当 于飞机在做下俯运动。对 应下俯角速度为
4-1概述 研究内容
大气紊流的本质及其特性的数学描述(如各个 方向紊流速度的频谱特性) ; 在大气紊流中飞行的飞行器运动方程的建立; 作为线性系假设
假设大气紊流是Gauss型的(服从正态分布规律),平 稳的,均匀的,各向同性的。 与飞行速度相比,认为紊流速度场在地面坐标系中是 “冻结的’,即速度分布不随时间而变化。
飞行动力学飞机的纵向运动课件

不足可能导致起飞失败。
04
飞机巡航阶段的纵向运动
巡航阶段的定义和目标
定义
巡航阶段是飞机在完成起飞和爬升后,保持高度和速度进行长时间飞行的阶段 。
目标
在巡航阶段,飞机的目标是保持稳定飞行,同时达到最优的经济性和效率。
巡航阶段的操作步骤
选择巡航高度
根据飞行计划和天气条件,选择 合适的高度层。
调整飞行速度
跑道状况、灯光、标记等 机场条件会影响飞机的降 落过程,需遵守机场规定 和飞行指引。
机型差异
不同机型在降落阶段的性 能和操作要求有所不同, 机组人员需熟悉所操作飞 机的特点和技术要求。
06
飞机纵向运动的模拟与控制
纵向运动的模拟方法
数学模型法
通过建立飞机纵向运动的 数学模型,模拟飞机的升 降、俯仰等运动,用于研 究飞行性能和稳定性。
飞行速度
发动机性能
飞行速度的变化会影响空气动力和发动机 推力,进而影响飞机的纵向运动。
发动机的性能状态直接影响飞机的纵向运 动,发动机故障或性能下降可能导致飞机 无法保持稳定飞行。
05
飞机降落阶段的纵向运动
降落阶段的定义和目标
定义
飞机降落阶段是指飞机从进场开始,通过着陆滑跑,直至完全停稳的整个过程。
着陆滑跑
飞机接地后,开始着陆滑跑,机组人员需根据实际情况控制刹车和推 力,使飞机减速并稳定在跑道上滑行。
完全停稳
当飞机停稳后,按照程序进行关车、解刹车等操作,确保安全。
降落阶段纵向运动的影响因素
01
02
03
天气条件
风、雨、雪、雾等天气因 素会影响飞机的降落过程 ,需根据实际情况采取相 应的措施。
机场条件
目标
04
飞机巡航阶段的纵向运动
巡航阶段的定义和目标
定义
巡航阶段是飞机在完成起飞和爬升后,保持高度和速度进行长时间飞行的阶段 。
目标
在巡航阶段,飞机的目标是保持稳定飞行,同时达到最优的经济性和效率。
巡航阶段的操作步骤
选择巡航高度
根据飞行计划和天气条件,选择 合适的高度层。
调整飞行速度
跑道状况、灯光、标记等 机场条件会影响飞机的降 落过程,需遵守机场规定 和飞行指引。
机型差异
不同机型在降落阶段的性 能和操作要求有所不同, 机组人员需熟悉所操作飞 机的特点和技术要求。
06
飞机纵向运动的模拟与控制
纵向运动的模拟方法
数学模型法
通过建立飞机纵向运动的 数学模型,模拟飞机的升 降、俯仰等运动,用于研 究飞行性能和稳定性。
飞行速度
发动机性能
飞行速度的变化会影响空气动力和发动机 推力,进而影响飞机的纵向运动。
发动机的性能状态直接影响飞机的纵向运 动,发动机故障或性能下降可能导致飞机 无法保持稳定飞行。
05
飞机降落阶段的纵向运动
降落阶段的定义和目标
定义
飞机降落阶段是指飞机从进场开始,通过着陆滑跑,直至完全停稳的整个过程。
着陆滑跑
飞机接地后,开始着陆滑跑,机组人员需根据实际情况控制刹车和推 力,使飞机减速并稳定在跑道上滑行。
完全停稳
当飞机停稳后,按照程序进行关车、解刹车等操作,确保安全。
降落阶段纵向运动的影响因素
01
02
03
天气条件
风、雨、雪、雾等天气因 素会影响飞机的降落过程 ,需根据实际情况采取相 应的措施。
机场条件
目标
飞行力学-1.11定态飞行与瞬时平衡假设

轴对称导弹
mz = mαz α + mzδzδ z
定态飞行与瞬时平衡假设
静平衡点
攻角逐渐增大时,mz~ α 之间的线性关系将被破坏。
(1) ωz = α = δz = 0
mz
(2) 由α、δz产生的俯仰 力矩的代数和为零, 飞行器处于纵向平衡 状态。
定态飞行与瞬时平衡假设
此时有:
mαz α + mzδzδ z = 0
V
定态飞行与瞬时平衡假设
定态飞行
飞行过程中速度、攻角、侧滑角、舵偏角等 均不随时间变化的飞行状态。
此时有:
ωz = α = δz = 0
定态飞行与瞬时平衡假设
于是
mz
=
mz0
+
mαz α
+
mzδzδ z
+
mϖz zϖ z
+
mαz α
+
mδz z
δz
mz = mz0 + mαz α + mzδzδ z
mαz mδ z
z
α B
定态飞行与瞬时平衡假设
瞬时平衡假设:
在任一瞬时,飞行器都处于力矩平衡状态,即飞行器从
一个平衡状态变为另一个平衡状态是瞬时完成的。此时,
作用在飞行器上的俯仰力矩只有
M
zαα和M
δ δ z
z
z
两部分,二
者大小相等,方向相反。
瞬时平衡假设实质上忽略了飞行器绕质心的旋转过程。在 飞行器的初步设计阶段,利用这个假设,可大大减少工作 量。
δzδzB
=
−
mαz mδz
z
αB
对于给定攻角的 平衡舵偏角。
mz = mαz α + mzδzδ z
定态飞行与瞬时平衡假设
静平衡点
攻角逐渐增大时,mz~ α 之间的线性关系将被破坏。
(1) ωz = α = δz = 0
mz
(2) 由α、δz产生的俯仰 力矩的代数和为零, 飞行器处于纵向平衡 状态。
定态飞行与瞬时平衡假设
此时有:
mαz α + mzδzδ z = 0
V
定态飞行与瞬时平衡假设
定态飞行
飞行过程中速度、攻角、侧滑角、舵偏角等 均不随时间变化的飞行状态。
此时有:
ωz = α = δz = 0
定态飞行与瞬时平衡假设
于是
mz
=
mz0
+
mαz α
+
mzδzδ z
+
mϖz zϖ z
+
mαz α
+
mδz z
δz
mz = mz0 + mαz α + mzδzδ z
mαz mδ z
z
α B
定态飞行与瞬时平衡假设
瞬时平衡假设:
在任一瞬时,飞行器都处于力矩平衡状态,即飞行器从
一个平衡状态变为另一个平衡状态是瞬时完成的。此时,
作用在飞行器上的俯仰力矩只有
M
zαα和M
δ δ z
z
z
两部分,二
者大小相等,方向相反。
瞬时平衡假设实质上忽略了飞行器绕质心的旋转过程。在 飞行器的初步设计阶段,利用这个假设,可大大减少工作 量。
δzδzB
=
−
mαz mδz
z
αB
对于给定攻角的 平衡舵偏角。
1 北航飞行力学_飞机性能计算的原始数据和质心运动方程

法向运动
xh
G d V Y Pky sin( P ) G cos g dt
北航 509
0
G
§1-3 飞机质心运动方程
几种特殊形式
•直线飞行(直线上升、下降等)
const , d / dt 0
•水平直线飞行(平飞加减速等)
G dV Pky Q G sin g dt Y G cos G dV Pky Q g dt Y G
喷气式发动机性能参数以及其高度特性、速度 特性、转速特性、特定油门状态 能画出铅垂平面内质心运动受力图,并推出各 种特殊运动状态下的质心运动方程
北航 509
2)最大状态:对应于最大许用转速(nmax)的发动机状态 。推力为非加力时的最 大值。只能连续工作5-10min,通常用于起飞、短时加速、爬升、空中机动等。 3)额定状态:对应于最大转速97% ,推力为最大状态的85-90%,可较长时间 工作(半小时~1小时),用于平飞、爬升、远航飞行等。
4)巡航状态:n巡90% n额,Pf巡 80%Pf额,耗油率最小,不限时,用于巡航。
最大可配平升力
Ymax
Y' LT ( ) max xA
Y2max Y1max
超音速时平尾平衡能力剧降形成飞行限制
C ymax
Cy
C ymax
最大允许升力系数
C ysx C yyx
C ydd C y max
C yyx min{ C ysx , C y max }
M
北航 509
f 0, 0 f 0, 0 一 般 f 0, 0 ( 0 f 0 0 0
0
Y 0
f 0, 0 0
xh
G d V Y Pky sin( P ) G cos g dt
北航 509
0
G
§1-3 飞机质心运动方程
几种特殊形式
•直线飞行(直线上升、下降等)
const , d / dt 0
•水平直线飞行(平飞加减速等)
G dV Pky Q G sin g dt Y G cos G dV Pky Q g dt Y G
喷气式发动机性能参数以及其高度特性、速度 特性、转速特性、特定油门状态 能画出铅垂平面内质心运动受力图,并推出各 种特殊运动状态下的质心运动方程
北航 509
2)最大状态:对应于最大许用转速(nmax)的发动机状态 。推力为非加力时的最 大值。只能连续工作5-10min,通常用于起飞、短时加速、爬升、空中机动等。 3)额定状态:对应于最大转速97% ,推力为最大状态的85-90%,可较长时间 工作(半小时~1小时),用于平飞、爬升、远航飞行等。
4)巡航状态:n巡90% n额,Pf巡 80%Pf额,耗油率最小,不限时,用于巡航。
最大可配平升力
Ymax
Y' LT ( ) max xA
Y2max Y1max
超音速时平尾平衡能力剧降形成飞行限制
C ymax
Cy
C ymax
最大允许升力系数
C ysx C yyx
C ydd C y max
C yyx min{ C ysx , C y max }
M
北航 509
f 0, 0 f 0, 0 一 般 f 0, 0 ( 0 f 0 0 0
0
Y 0
f 0, 0 0
飞行力学-1.13俯仰操纵力矩与阻尼力矩

作用在飞行器上的力和力矩第一章俯仰操纵力矩与阻尼力矩俯仰操纵力矩升降舵偏转对飞行器质心形成的力矩称为纵向操纵力矩。
)()()(G R y z z z G R z y z z x x c m qSLm X X qs c M z z z z −−==−−=δδδδδδδ式中,为舵面偏转单位角度时所引起的操纵力矩系数,即舵面效率。
z zm δ对正常式布局对鸭式布局0<z z m δ0>z zm δ俯仰操纵力矩俯仰阻尼力矩由飞行器绕Oz1轴旋转所引起的,其大小和旋转角速度ωz 成正比,方向总与ωz相反,其作用是阻止飞行器绕Oz1轴的旋转运动。
V L qSL m M z z z z z z z/)(ωωωωω==表达式为:式中:总是一个负值,它的大小主要取决于Ma ,飞行器的几何形状和质心的位置。
为了书写方便,通常将之简记为,但意义不变。
z zm ωz z m ω俯仰阻尼力矩俯仰阻尼力矩俯仰阻尼力矩虽然比较小,但有利于过渡过程的振荡衰减,对改善飞行器过渡过程品质有重要意义。
下洗延迟引起的俯仰力矩一般情况下,飞行器的飞行都是非定态飞行。
空气动力和力矩系数不仅与该瞬时的α、δz 等参数有关,还与这些参数随时间的变化规律有关。
作为近似计算,可以使用定态假设,即认为空气动力和力矩系数只与该瞬时的运动参数有关。
但考虑下洗延迟现象时,就不能采用定态假设了。
俯仰力矩鸭式布局飞行器的升降舵连续偏转时,同样会由于下洗延迟产生类似的俯仰阻尼力矩。
z z z M δδ 正常式布局尾翼处实际下洗角偏小相当于尾翼处正的附加升力负的附加俯仰力矩阻止α增大尾翼处实际下洗角偏大相当于尾翼处负的附加升力正的附加俯仰力矩阻止α减小0α< 0α> 相当于阻尼力矩的作用αα z M 下洗延迟引起的俯仰力矩。
飞行动力学PPT课件
当V=0,p=p0,—最大静压
p
1 2
V
2
p0
总压
V大,p小;V小,p大
第5页/共24页
四、马赫数M
• 马赫数定义为气流速度(v)和当地音速(a)之比:M V
音速:a 20 T
T:空气的绝对温度
a
a与温度有关,表示空气受压缩的程度,M与a都是几何位 置的函数
• 临界马赫数Mcr
远前方的迎面气流速度V与远前方空气的音速a之比 • 迎面气流的M数超过Mcr时,翼面上出现局部的超音速区,
式中:
q=1/2V2—动压,qs=牛顿(力), S—机翼面积, S —第尾21页翼/共面24页积,
第一节 重点
空速,马赫数,动压; 坐标系:惯性坐标系、机体坐标系; 飞机运动参数:
三个姿态角;迎角与侧滑角; 操纵:三个舵面偏转角; 稳定性定义;
第22页/共24页
第一节 结束 谢谢!
第23页/共24页
• 钝头物体的激波是脱体波(正激波),产生大波阻 • 楔形物体的激波是倾斜的(附体波 ),波阻较小,用于
超音速飞机的机头
第8页/共24页
七 膨胀波
•
伯努利静态公式 p 1 V 2 C(常数) 不适用于高速流动情况 由于空气高速流动时2 密度不是常数
,
• 由推导伯努利方程动态过程,得出考虑到空气的可压缩
第13页/共24页
二、飞机的运动参数(续)
• 速度轴系与地面轴系的关系
1.航迹倾斜角 飞行速度V与地平面间的夹角 以飞机向上飞时的为正
2.航迹方位角
飞行速度V在地平面上的投影与ogxg间的夹角 速度在地面的投影在ogxg之右时为正
3.航迹滚转角
速度轴oza与包含速度轴oxa的铅垂面间的夹角, 第14页/共24页
导弹飞行力学幻灯片

b. 过载与弹道特性的关系 由(2-41)式很容易看出:
当 nx2 sin 时,导弹作等速飞行; nx2 sin 时,导弹作减速飞行; nx2 sin 时,导弹作加速飞行。
这说明导弹在飞行过程中,其弹道倾角 越 小,导弹的过载就可越小,改变速度大小的能力 也就越强,即加速性也越好。
nx1 nxc cos cos nyc sin nzc cos sin ny1 nxc sin cos nyc cos nzc sin sin nz1 nxc sin nzc cos
(2-38)
导弹飞行力学
d. 法向过载、切向过载与纵向过载、横向过载
根据描述导弹质心空间平动的动力学方程很 容易即可得到导弹的过载在不同坐标系内的投影 形式。
导弹飞行力学
a. 过载在弹道坐标系的投影
根据作用于导弹上的各个力在弹道坐标系三个 轴上的投影及过载的概念,可直接得到过载在弹道 坐标系的投影:
nx2
1 (P cos cos
G
X)
n y2
1 G
P(
过载:作用于导弹上的可操纵力与导弹重量的 比值,即
nN G
(2-33)
过载是矢量,方向与可操纵力的方向一致,可 直观地反映导弹的弹道特性与动态特性,是导 弹弹体结构强度设计和制导与控制系统设计的 重要依据参数。
导弹飞行力学
2. 过载的分解
在进行运动特性分析、制导与控制系统设计 及弹体结构强度计算等不同阶段的导弹设计工作 时,为了方便需要将过载在不同的坐标系内进行 分解。
n xc
1 (P cos cos
G
X)
n yc
1 (P sin
当 nx2 sin 时,导弹作等速飞行; nx2 sin 时,导弹作减速飞行; nx2 sin 时,导弹作加速飞行。
这说明导弹在飞行过程中,其弹道倾角 越 小,导弹的过载就可越小,改变速度大小的能力 也就越强,即加速性也越好。
nx1 nxc cos cos nyc sin nzc cos sin ny1 nxc sin cos nyc cos nzc sin sin nz1 nxc sin nzc cos
(2-38)
导弹飞行力学
d. 法向过载、切向过载与纵向过载、横向过载
根据描述导弹质心空间平动的动力学方程很 容易即可得到导弹的过载在不同坐标系内的投影 形式。
导弹飞行力学
a. 过载在弹道坐标系的投影
根据作用于导弹上的各个力在弹道坐标系三个 轴上的投影及过载的概念,可直接得到过载在弹道 坐标系的投影:
nx2
1 (P cos cos
G
X)
n y2
1 G
P(
过载:作用于导弹上的可操纵力与导弹重量的 比值,即
nN G
(2-33)
过载是矢量,方向与可操纵力的方向一致,可 直观地反映导弹的弹道特性与动态特性,是导 弹弹体结构强度设计和制导与控制系统设计的 重要依据参数。
导弹飞行力学
2. 过载的分解
在进行运动特性分析、制导与控制系统设计 及弹体结构强度计算等不同阶段的导弹设计工作 时,为了方便需要将过载在不同的坐标系内进行 分解。
n xc
1 (P cos cos
G
X)
n yc
1 (P sin
飞行理论课件
N
120
100
80
60 16°
40 20
0
10
8° 6°4°
60
VMP
100
VMD 140
0° 2°
VI
180
220
V.平飞速度范围
平飞最小速度到平飞最大速度的区间称为平飞速度范围。 平飞速度范围越大,飞行性能越好。
➢ 平飞第一速度范围:最小
功率速度到最平飞最大速
度。
P
是正操纵区。
➢ 平飞第二速度范围:平飞
VI
V1 V2
1、在第一速度范围内的操纵
加速:
V1到V2,加油门, 随速度的增加,推 杆(减小迎角)保 持高度。
减速:
V2到V1,收油门, 随速度的降低,拉 杆(增大迎角)保 持高度。
第二速 度范围
P
第一速 度范围
油门大
迎角大 速度小
油门小
油门小 迎角大
迎角小 速度小
速度大
0 V1 V2 VMP
油门大 迎角小 速度大
n R W
可将载荷因数沿机体轴三个方向进行分解。
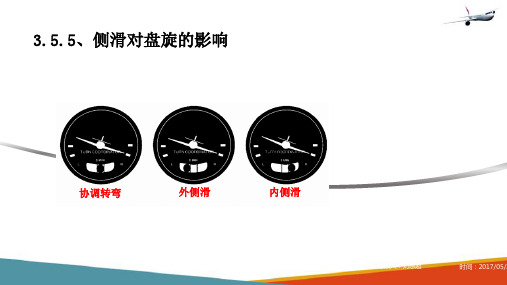
汇报人:刘惠超
时间:2017/05/2
一、 法向载荷因数
法向载荷因数(ny)是指飞机沿竖轴方向的载荷 与飞机本身重量之比。主要指飞机升力(L)与飞机重 量(W)之比。
ny
L W
汇报人:刘惠超
时间:2017/05/2
二、纵向载荷因数
法向载荷因数(nx)是指飞机沿纵轴方向的载荷 与飞机本身重量之比。主要指飞机推力(P)与阻力 (D)之差与飞机重量(W)之比。
汇报人:刘惠超
时间:2017/05/2
3.1.1初始上升
用杆保持规定的俯仰姿态上升,离地后,当确保飞机有正的上升 率,收起落架,在安全高度飞机加速至大于起飞安全速度V2。继续 上升至规定高度,再调整构型和功率。