自适应控制--第五讲 最小方差自校正控制共46页文档
现代控制理论第16章自校正控制
最早的自适应控制方案是在五十年代末由美国麻省理工学 院怀特克(Whitaker )首先提出飞机自动驾驶仪的模型参考自适 应控制方案。自适应控制是自动控制领域中的一个新分支,三 十多年来取得了很大的发展,并得到了广泛的重视。
(16-16)
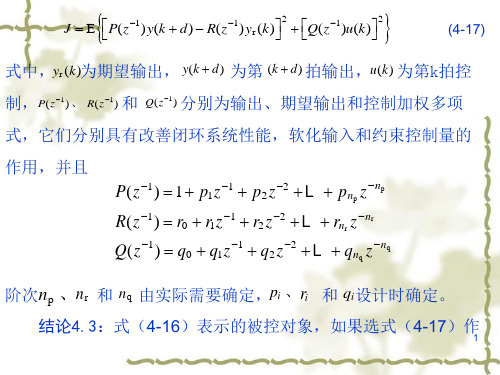
为最小。式中,y k m为确定性输出。
这里的最优控制规律应为已测得的输出序列 yk yk,yk 1, ,y0
的线性函数,便于实现闭环控制。
由式(16-12)有
y
k
m
B q1 Aq1
uk
C q1 Aq1
ek
m
q 1 q 1
u
k
(16-25)
代入式(16-20)得
B q1
E q1 A q1
B q1
y k m D q1 ek m
u k
qm
uk
A q1
计一个调节器,使输出量的方差尽量地小,可将式(16-26)代 入性能指标,有:
J E y k m2
E D q1
2
ek m
E E C
q 1 q 1
B q1
y k
A q1 C q1
C q1
D q1
ek
m
E C
q 1 q 1
y
最小方差控制

(16)
B(q 1 ) F (q 1 )u(k ) -G(q 1 ) y(k )
此时系统输出的方差为:
(17)
2 2 E{ y(k d ) 2 } E{~ y (k d k ) 2 } (1 f1 f d 1 ) 2 (18)
由式(16)可见,最小方差控制律可以通过先求出输出提前d步的 ˆ (k d k ) ,然后令 y ˆ (k d k ) 等于理想输出值yr(这里yr=0) 预测值 y 而得到,因此最小方差控制问题可分离成两个问题,一个是预测 问题,另一个是控制问题。
利用式(4)可将式(8)化简为:
(8)
1 1 1 B ( q ) F ( q ) G ( q ) 1 y(k d ) F (q )e(k d ) u (k ) y(k ) (9) 1 1 C (q ) C (q ) 记基于k时刻的观测值对y(k+d)的预报为: ˆ (k d k ) 则它是k时 y
对该系统,有如下假设: 1. 被控系统时滞时间d以及时滞算子q-1的多项式A、B和C的阶 次及系数都已知; 2. 被控系统为最小相位系统,即多项式B(q-1)的所有零点都在单 位圆内; 3.A(q-1) 、 C(q-1) 所有零点都为稳定的 , 即所有零点都在单位 圆内; 4. {e(k)}为零均值白色噪声序列,且E{e2(k)}=2.
由最小方差控制的原理可知,最小方差是通过臵输出的 d步预测值y ˆ (k d k ) 为0而实现的。因此最小方差控制的核 心是预测。 令 (q-1)=G(q-1) = 0+ 1q-1 +...+ n-1q-(n-1)
(q-1)=B(q-1)F(q-1)=0+1q-1 +...+ n+d-1q-(n+d-1)
广义最小方差自校正控制
将其代入式(4-17)
J
E
P(z1) y(k d
k)
P(z1)E(z 1) (k
d)
R(
z
1
)
yr
(k
)
2
Q(z 1)u(k)2
由于(k d) 与yr (i), u(i), y(i), i „ k 不相关,并且它们的互相关函数为零,所以上式 可写为
J E P(z1) y(k d k) R(z1) yr (k)2 Q(z1)u(k)2 P(z1)E(z 1)(k d)2
小很多,对系统输出的影响可忽略不计,根据 z 变换的终值定理和 前面导出的表达式,系统输出的稳态值为
zd B(z1)R(z1)
q0 b0
Q(z 1)u(k)
P(z 1)E(z 1) (k
d)
z (k d k) P(z 1)E(z 1) (k d )
式中
(4-21)
z (k d k) P(z 1) y (k d k) R(z 1) yr (k) (q0 / b0 )Q(z 1)u(k) 于是,性能指标函数可表述为
y(k d k) u(k) f0 b0 ,
Q(z1)u(k) u(k)
q0
代入式(4-19),并不考虑符号 “E”,则有
P(
z
1 )
y
(k
d
k) R(z 1) yr (k)
f0
q0Q(z 1)u(k)
0
从而
3
u(k) R(z 1) yr (k) P(z 1) y (k d k) (q0 / b0 )Q(z 1)
(4-20)
除 z(k d) 外,其它符号含义同前。求使性能指标函数 4
J E z2(k d)
现代控制理论自校正控制

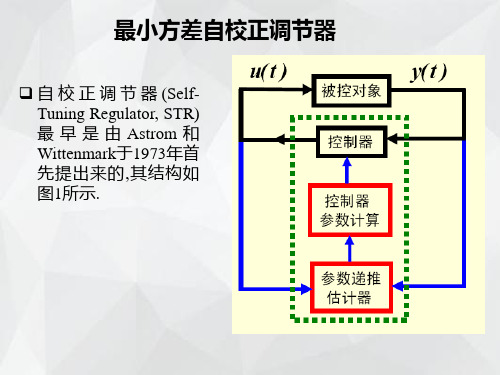
控制对象参数ˆ 。参数估计的常用算法 有随机逼近法、最小二乘法、极大似然 法等。调节器的功用是根据参数估计器 不断送来的参数估值 ˆ 。
图16-1
通过一定的控制算法,按某一性能指标不断地形成最优 控制作用。调节器的常用算法有最小方差、希望极点配置、 二次型指标等。其中,以用最小二乘法进行参数估计,按最 小方差来形成控制作用的自校正控制最为简单,并在战术导 弹控制中获得了实际应用。
自动驾驶仪
到目前为止,在先进的科技领域出现了许多形式不同的自 适应控制方案,但比较成熟并已获得实际应用的可以概括成 两大类: ⑴ 模型参考自适应控制; ⑵ 自校正控制。
自适应控制的应用领域
模型参考自适应控制需在控制系统中设置一 个参考模型,要求系统在运行过程中的动态 响应与参考模型的动态响应相一致(状态一 致或输出一致),当出现误差时便将误差信 号输入给参数自动调节装置,来改变控制器 参数,或产生等效的附加控制作用,使误差 逐步趋于消失。在这方面法国学者朗道(ndau) 把超稳 定性理论应用到模型参考自适应控制中来,做出了杰出贡献 。
1 d12 L
d2 m1
2
这样,我们得到了为输出序列线性函数的最优控制规律,因 此可以很方便地实现闭环控制。
第二节 最小方差自校正调节器
在第一节的讨论中,假设被控对象的模型已知,因此它 属于随机控制问题。最小方差自校正调节器所要解决的问题 是被控对象参数未知时的最小方差控制问题。这里,首先应 该通过适当的方法进行参数估计,然后以参数的估值来代替 实际的参数,按最小方差指标综合最优控制规律。
(16-15)
在辨识中,这类模型称为被控自回归滑动平均模型CARMA。
第一节 最小方差控制律
自适应控制-- 极点配置自校正
例题: 已知线性定常系统的传递函数为:
Y ( s) 1 1 3 U ( s) s( s 1)( s 2) s 3s 2 2s
Bm0 Am (1) / B (1) 是为了消除稳态误差。将式 (6) 和 (7) 其中,
代入式 (4),左边分子分母对消 B ,
z d B R z d Bm0 B d Am AF1 z B G
27
A0 并考虑右边分子分母的阶次低于左边,为使其相等,右边分子分母同乘多项 式 ,从而有 d d
a3 0 a2 2 a 3 1
试确定状态反馈矩阵F ,要求将系统极点配置在 s1 2, s2 1 j, s3 1 j 的位置上.
状态反馈的系统方框图
2
3
r
u
S
1
x3
S
x2
S
y 1x y
4 4
F
极点配置自校正调节器
输入。
这样构成的控制系统方框图见图2,表达式如下。
24
(k )
1 A( z 1 )
yr ( k )
R( z 1 ) F ( z 1 )
u (k )
y (k )
z d B( z 1 ) A( z 1 )
G ( z 1 ) F ( z 1 )
图2 极点配置系统控制方框图
F (z ) z d B( z 1 ) R( z 1 ) (k ) y (k ) y ( k ) r 1 1 d 1 1 1 1 d 1 1 A( z ) F ( z ) z B( z )G ( z ) A( z ) F ( z ) z B( z )G ( z )
《自适应控制》课件

一、课件简介1.1 课件目的本课件旨在介绍自适应控制的基本概念、原理和应用,帮助学习者深入理解自适应控制理论,掌握自适应控制器的设计和分析方法。
1.2 课件内容本课件主要包括自适应控制的基本概念、自适应控制系统的类型及特点、自适应控制器的设计方法、自适应控制的应用领域等内容。
二、自适应控制的基本概念2.1 自适应控制的定义2.2 自适应控制的目标自适应控制的目标是使系统在未知干扰和参数变化的作用下,仍能达到预定的性能指标,包括稳态性能、动态性能和鲁棒性能等。
2.3 自适应控制的基本原理自适应控制的基本原理包括误差反馈、模型参考自适应控制和自校正控制等。
三、自适应控制系统的类型及特点3.1 类型自适应控制系统主要分为模型参考自适应控制、误差反馈自适应控制和模糊自适应控制等。
3.2 特点自适应控制系统的特点包括具有较强的鲁棒性、适应性和灵活性,能够在线调整控制器参数,适应系统的不确定性和变化。
四、自适应控制器的设计方法4.1 基于李雅普诺夫理论的设计方法4.2 基于最优控制理论的设计方法4.3 基于模糊逻辑的设计方法五、自适应控制的应用领域5.1 工业控制系统5.2 控制5.3 航空航天领域5.4 生物医学领域5.5 新能源领域六、自适应控制的关键技术6.1 系统建模与辨识系统建模与辨识是自适应控制的基础,涉及到对被控对象动态特性的估计和建模。
6.2 参数估计与更新参数估计与更新技术是自适应控制的核心,主要包括观测器设计、参数自适应律设计等。
6.3 控制律设计控制律设计是自适应控制的关键,需要保证系统在面临不确定性和外界干扰时,仍能达到期望的性能指标。
七、自适应控制的应用案例分析7.1 工业过程控制以工业生产线上的温度控制为例,介绍自适应控制如何在工业过程中应用,提高控制精度和稳定性。
7.2 导航以无人驾驶汽车为例,介绍自适应控制如何在复杂环境中实现精确的路径跟踪和避障。
7.3 航空航天器控制以卫星控制系统为例,介绍自适应控制如何在高动态和高不确定环境下保证控制系统的性能。
自适应控制基本原理-自校正控制
(2.48)
2.2 动态过程参数估计的最小二乘法
2.2.1 基本最小二乘方法
y(n 1) a1 y(n) an y(1) b0u(n 1) bnu(1) (n 1) y(n 2) a1 y(n 1) an y(2) b0u(n 2) bnu(2) (n 2)
u(n 2)
u(2)
y(n N 1) y(N ) u(n N ) u(N )
y(N) Φ(N)θ(N) ξ(N)
(2.49)
θˆ (ΦTΦ)1ΦT y
(2.54)
增加一个新的观测数据 u(n N 1), y(n N 1) ,则
(2.45a) (2.45b)
(k) 为独立的随机噪声,要求其满足
E( (k)) 0
(2.46a)
2 E{ (i) ( j)}
i j
0 i j
(2.46b)
lim
1
N
(k)2
N N
k 1
(2.46c)
随机噪声的均值为零,彼此相互独立,方差为有限正值,噪声的采样均方值有界。
如何解决上述问题?
2.2 动态过程参数估计的最小二乘法
2.2.2 递推最小二乘方法
y(n 1)
y(N)
y(n
2)
y(n
N
)
y(n) y(1) u(n 1) u(1)
Φ(N)
y(n 1)
y(2)
θˆ(N 1) ΦT (N)Φ(N) (N 1) T (N 1) 1 ΦT (N) y(N) (N 1)y(N 1) (2.57)
自适应控制基本原理-自校正控制
2.2 动态过程参数估计的最小二乘法
2.2.1 基本最小二乘方法
A(z1) y(k) B(z1)u(k) (k)
A(z1) 1 a1z1 an zn B(z1) b0 b1z1 bn zn
记:
θ [a1, a2 ,, an ,b0 ,b1,,bn ]T
自校正控制
自校正控制
最小方差自校正控制器 极点配置自校正控制器 自校正PID控制
自校正控制
自校正控制系统又称自优化控制或模型辨识自适应控制。
通过采集的过程输入、输出信息,实现过程模型的在线辨识和参数估计。 在获得的过程模型或估计参数的基础上,按照一定的性能优化准则,计算控 制参数,使得闭环系统能够达到最优的控制品质。
矩阵求逆定理 设A 、C 和 BCD均为非奇异矩阵,则
A BCD 1 A1 A1B C 1 DA1B 1 DA1
(2.58)
令
P(N) ΦT (N)Φ(N) 1
(2.59)
2.2 动态过程参数估计的最小二乘法
2.2.2 递推最小二乘方法
P(N 1) ΦT (N)Φ(N) (N 1) T (N 1) 1 P1(N) (N 1) T (N 1) 1
(2.45a) (2.45b)
(k) 为独立的随机噪声,要求其满足
E( (k)) 0
(2.46a)
2 E{ (i) ( j)}
i j
0 i j
(2.46b)
lim
1
N
(k)2
N N
k 1
(2.46c)
随机噪声的均值为零,彼此相互独立,方差为有限正值,噪声的采样均方值有界。
最小方差自校正控制

用最小方差自校正控制算法对以下系统进行闭环控制:y(k) -1.7y(k -1) 0.7y(k - 2) = u(k - 4) 0.5u(k - 5) (k) 0.2 (k -1) 式中(k)为方差为0.1的白噪声,取期望输出y r(k)为幅值为10的方波信号。
解:上式可以化为:(1 - 1.7z,0.7z')y(k)二z'(1 0.5z')u(k) (1 0.2zJ (k) 则有1 1 2A(z ) = 1-1.7z—0.7zA_JB(z ) = 1 0.5zC(z J) =1 0.2z Jd =4Diophantine 方程为:c(z‘)= A(Z')F(z‘)z“G(z‘)又有H(z」)二B(z」)F(z」)6 A取初值P(0)=10门(0) =0递推公式为:珂k)二珂k -1) K(k)[y(k) - 7(k- d户?(k -1)]K(k)- Pdgd)I ' 1+ 甲(k-d)P(k-1)?(k-d)[ P(k) = [l —K(k)叩(k —d)]P(k —1)程序清单如下:clear all; close all;na=length(a)-1; nb=length(b)-1; nc=length(c)-1;%多项式 A 、B、C 的阶次nh=nb+d-1; ng=na-1; %nh、ng 为多项式H、G 的阶次L=400;uk=zeros(d+nh,1); %输入初值:yk=zeros(d+ng,1); %输出初值yek=zeros(nc,1); %最优输出预测估计初值yrk=zeros(nc,1); %期望输出初值xik=zeros(nc,1); %白噪声初值yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)]; % 期望输出xi=sqrt(0.1)*randn(L,1); % 白噪声序列%递推估计初值thetaek=zeros(na+nb+d+nc,d);P=10A6*eye( na+n b+d+nc); %P(k )的初始值for k=1:Ltime(k)=k;y(k)=-a(2:na+1)*yk(1:na)+b*uk(d:d+nb)+c*[xi(k);xik]; % 采集输出数据%递推增广最小二乘法公式估计参数phie=[yk(d:d+ng);uk(d:d+nh);-yek(1:nc)];K=P*phie/(1+phie'*P*phie); thetae(:,k)=thetaek(:,1)+K*(y(k)-phie'*thetaek(:,1));P=(eye(na+nb+d+nc)-K*phie')*P;ye=phie'*thetaek(:,d); %预测输出的估计值%提取辨识参数ge=thetae(1:ng+1,k)'; he=thetae(ng+2:ng+nh+2,k)';ce=[1 thetae(ng+nh+3:ng+nh+2+nc,k)'];if abs(ce(2))>0.9ce(2)=sign(ce(2))*0.9;endif he(1)<0.1 %设h0 的下界为0.1 he(1)=0.1;end u(k)=(-he(2:nh+1)*uk(1:nh)+ce*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-ge*[y(k);yk( 1:na-1)])/he(1); %控制量%更新数据for i=d:-1:2thetaek(:,i)=thetaek(:,i-1);endthetaek(:,1)=thetae(:,k);for i=d+nh:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=d+ng:-1:2yk(i)=yk(i-1);endyk(1)=y(k);for i=nc:-1:2yek(i)=yek(i-1);yrk(i)=yrk(i-1);xik(i)=xik(i-1);endif nc>0yek(1)=ye;yrk(1)=yr(k);xik(1)=xi(k);endendfigure(1);subplot(2,1,1); plot(time,yr(1:L),'r:',time,y); xlabel('k'); ylabel('y_r(k) 、y(k)');legend('y_r(k)','y(k)'); axis([0 L -20 20]);subplot(2,1,2);plot(time,u);xlabel('k'); ylabel('u(k)'); axis([0 L -40 40]);figure(2)subplot(211) plot([1:L],thetae(1:ng+1,:),[1:L],thetae(ng+nh+3:ng+2+nh+nc,:)); xlabel('k'); ylabel('参数估计g、c'); legend('g_0','g_1','c_1'); axis([0 L -3 4]);subplot(212) plot([1:L],thetae(ng+2:ng+2+nh,:));xlabel('k'); ylabel('参数估计h');legend('h_0','h_1','h_2','h_3','h_4'); axis([0 L 0 4]);yr(k)y(k) o-2沁>3■呻卜•如2020o-4o20k2-2o20k432h计估数参o20)Kry)K(yc、g计估数参。
自适应控制第五讲最小方差自校正控制

原理:通过实时调整控制参数,减 小误差,提高控制精度
优势:自校正控制能够适应不同 飞行环境和任务需求,提高无人 机执行任务的可靠性和成功率
最小方差自校正 控制的未来发展
最小方差自校正控制与其他控制方法的融合
最小方差自校正控制与模糊控制融合,提高系统的鲁棒性和适应性 最小方差自校正控制与神经网络控制融合,实现自适应学习和优化控制 最小方差自校正控制与滑模控制融合,降低系统的抖动和提高快速响应性能 最小方差自校正控制与多智能体系统融合,实现分布式协同控制和优化
线性方程组。
最小方差自校正控制的算法流程
确定系统参数: 根据系统特性 和要求,确定 需要估计的系
统参数。
建立模型:根 据已知的参数, 建立系统的数
学模型。
计算最优控制律: 根据建立的模型 和最小方差自校 正控制算法,计 算最优控制律。
实施控制:将计 算出的最优控制 律应用到实际系 统中,实现自校
正控制。
智能交通:用于实现智能交通信号控制,提高道路通行效率和交通安全。
航空航天:用于控制飞行器的姿态、高度、速度等参数,提高飞行器的稳定性和安全性。
机器人控制:用于实现机器人的精准定位、姿态控制、避障等功能,提高机器人的智能水平 和自主性。
最小方差自校正 控制的基本原理
最小方差自校正控制的数学模型
最小方差自校正 控制的应用实例
最小方差自校正控制在工业控制中的应用
简介:最小方差自校正控制是一种先进的控制算法,在工业控制领域中具有广泛的应用前景。
应用实例:该算法在化工、制药、钢铁等行业的反应釜温度控制、流量控制等方面取得了显著 的效果。
优势:最小方差自校正控制算法具有自适应、自学习、自校正等特点,能够快速适应工业现场 的复杂变化,提高控制精度和稳定性。
自适应第五章自校正控制(一)

E[e(k )] 0
随机序列{e(k)}为同分布、零均值,独立随机变量,其方差为 2(常数)
E[e(i)e( j )]
E[e 2 (i )] 2 , i j
E[e(i )]E[e( j )] 0, i j
最小方差自校正控制的基本思想:
1、假定u(k) 0,根据在k时刻已测得的y(0),y(1), , y(k)来预报(k+m) ˆ 时刻的y( k+m Y K ),即预报随机扰动x(k+m)。 (控制滞后m个采用周期,对输出提前m步预报-关键)
D (q 1 )=1+(c1 -a1 )q -1 (m 1 1阶)
(n 1 1阶)
E (q 1 ) [(c2 a2 ) a1 (c1 a1 )] a2 (c1 a1 )q 1
1
q 2 E (q 1 ) y(k+2) D(q )e(k 2) e(k 2) 1 A(q ) e(k+m),e(k+m-1), , e(k 1)线性组合, e(k 2) (c1 a1 )e(k 1) 与Y K 独立 E (q 1 ) e( k ) e(k),e(k-1), , e(0)线性组合,与Y K 不独立 1 A(q )
① 长除法。 ② 令恒等式两边q-1各次幂的系数相等,联立方程组。
举例:设A(q 1 ) 1 a1q-1 +a2q-2 C(q-1 )=1 c1q-1 +c2q-2 (n 2)
E(q -1 )=e0 e1q -1 (n 1 1阶)
若m=2,令D(q 1 ) 1 d1q-1 (m 1 1阶)
2、根据预报输出计算适当的控制作用u(k),补偿由随机扰动在(k+m) 时刻对输出的影响。
自适应控制--自校正控制.详解

1
2
n
1
2
n
1
2
m
1
2
n
1
2
n
y (t1 ) 1 x1 (t1 ) 2 x2 (t1 ) n xn (t1 ) y (t ) x (t ) x (t ) x (t ) 2 1 1 2 2 2 2 n n 2 y (t m ) 1 x1 (t m ) 2 x2 (t m ) n xn (t m ) 矩阵向量形式:i.e Y X y (t1 ) x1 (t1 ) x2 (t1 ) y (t ) x (t ) x (t ) 2 2 Y 2 , X 1 2 y (t m ) x1 (t m ) x2 (t m )
(2)递推最小二乘估计算法:
T ( N 1) ( N ) K ( N 1)[ y ( N 1) ( N 1) ( N )] P( N ) ( N 1) K ( N 1) T 1 ( N 1) P( N ) ( N 1) P( N 1) [ I K ( N 1) T ( N 1)]P( N )
补充:什么是最小二乘算法?
实例1:量测电压 第一次 第二次 220V 210V 平均215V
ˆ e1 220 u 第一次误差: ˆ 设电压估计值为u ˆ e2 210 u 第二次误差: 准则:使误差平方和最小。
2 ˆ ) 2 (210 u ˆ ) 2 min 最小二乘准则:J e12 e2 (220 u
ˆ e ˆi 描述: yi hi x
准则:
自适应控制实验
实验一一、 可增益Lyapunov-MRAC 算法1.1 步骤:已知:)(s D s N )(第一步:选择参考模型,即Gm (s );第二步:选择输入信号r y (t )和自适应增益γ;第三步:采样当前参考模型输出m y (t )和系统实际输出p y (t ); 第四步:利用公式())()(t y t e t k r c γ= 和公式())()(t y t k t u r c =;第五步:t t+h ,返回第三步,继续循环。
1.2 考虑如下被控方对象模型:()()1512+++=s s s k s G p p ,p k 未知(仿真时取p k =1)选择参考模型为:()()1512+++=s s s k s G m m ,m k =1因为()s G P 、()s G m 均为严格正实函数。
取自适应增益γ=0.2,输入r y 为方波信号,幅值r=1,采用可调增益Lyapunov-MRAC 算法,仿真程序以及仿真结果如下。
二、仿真程序%可调增益Lyapunov-MRAC clear all ;close all ;h=0.1;L=100/h;%数值积分步长和仿真步数num=[1 1];den=[1 5 1];n=length(den)-1; kp=1;[Ap,Bp,Cp,Dp]=tf2ss(kp*num,den); km=1;[Am,Bm,Cm,Dm]=tf2ss(km*num,den); gamma=0.2;yr0=0;u0=0;e0=0;xp0=zeros(n,1);xm0=zeros(n,1); kc0=0;r=1;yr=r*[ones(1,L/4) -ones(1,L/4) ones(1,L/4) -ones(1,L/4)]; for k=1:L;time(k)=k*h;xp(:,k)=xp0+h*(Ap*xp0+Bp*u0); yp(k)=Cp*xp(:,k);xm(:,k)=xm0+h*(Am*xm0+Bm*yr0); ym(k)=Cm*xm(:,k); e(k)=ym(k)-yp(k);kc=kc0+h*gamma*e0*yr0;%Lyapunov-MRAC 自适应律 u(k)=kc*yr(k);%更新数据yr0=yr(k);u0=u(k);e0=e(k); xp0=xp(:,k);xm0=xm(:,k); kc0=kc; endsubplot(2,1,1);plot(time,ym,'r',time,yp,':'); xlabel('t');ylabel('y_m(t)、y_p(t)'); legend('y_m(t)','y_p(t)'); subplot(2,1,2); plot(time,u);xlabel('t');ylabel('u(t)');三、仿真结果0102030405060708090100-112ty m (t )、y p (t )0102030405060708090100-2-1012tu (t )实验二一、最小方差直接自校正控制算法1.1 步骤:已知:模型阶次a n 、b n 、c n 及纯延时d 。
最小方差控制
2 最小方差控制
最小方差控制的目的是要确定u(k),使得输出的方差为最 小,由于u(k)最早只能影响到y(k+d),因此选择性能指标为
J E{ y(k d ) }
2
(14)
上式可改写为:
ˆ (k d k ) ~ J E{ y (k d ) 2 } E{[ y y (k d k )]2 } ˆ (k d k ) 2 } E{~ E{ y y (k d k ) 2 }
在最小方差调节器的研究中,所讨论的被控系统的模型为 A(q-1)y(k)=B(q-1)u(k-d)+C(q-1)e(k) (1)
1 1 n A ( q ) 1 a q a q 其中: 1 n
B (q 1 ) b0 b1q 1 bn q n C (q 1 ) 1 c1q 1 cn q n
刻及以前的输入输出的函数。若对预测的要求是使预测的误差平 方即系统误差的方差为最小,则损失函数可表示为:
ˆ (k d k ) y (k d )]2 } J E{[ y
1 1 1 B ( q ) F ( q ) G ( q ) 1 2 ˆ ( k d k ) F ( q )e( k d ) E{[ y u ( k ) y ( k )] } 1 1 C (q ) C (q ) (10) 上式中F(q-1)e(k+d)与其它项均不相关,且由于{e(k)}为零均值 白噪声序列,式(10)可写为
1 最小方差预测
设在k时刻已观测到输出值y(k),y(k-1),…等,希望由此得到预 测值 y ˆ (k d k ) 。
1 1 B ( q ) C ( q ) 由式(1)有: y (k d ) u (k ) e(k d ) 1 1 A(q ) A(q )