冷轧机工作辊弯辊控制系统模拟
带钢冷连轧机组中的自动辊缝控制系统

带钢冷连轧机组中的自动辊缝控制系统带钢冷连轧机组是一种重要的金属加工设备,用于将带钢材料冷变形成特定形状和尺寸的轧制产品。
在带钢冷连轧过程中,辊缝控制系统起着关键的作用,可以实现带钢的正确定位和轧制,提高产品质量和生产效率。
自动辊缝控制系统是目前带钢冷连轧机组中最先进的控制系统之一,它主要由计算机控制系统、感应式传感装置、反馈控制装置、作用系统四部分组成。
计算机控制系统负责对带钢的温度、尺寸、重量等参数进行检测和计算,并根据实时数据进行自动控制。
感应式传感装置可以实时感知带钢的运动轨迹和位置,将信号传递给反馈控制装置,以实现辊缝的自动控制。
反馈控制装置通过对感应式传感器检测到的信号的解析和处理,实现了带钢的准确定位和精准轧制。
作用系统则是根据计算机控制指令和反馈信号的结果,分析和计算最优的轧制参数,自动驱动轧辊的位置、转速、间隙等参数,实现完美的带钢轧制。
自动辊缝控制系统的优点是显而易见的。
首先,它可以大大提高带钢的轧制精度和生产效率。
由于自动辊缝控制系统可以根据实时数据动态计算轧辊的运动状态和轧制参数,实现自动控制轧辊间隙的大小和位置,大大提高了带钢的轧制精度和质量。
同时,自动化控制的自动辊缝控制系统具有高效能和可靠性,可以提高轧制速度和生产效率,降低设备运行成本。
其次,自动辊缝控制系统还可以提高工作环境和操作人员的安全性。
由于系统采用了自动控制功能,减少了人力干预,大大降低了工作事故的风险。
操作人员只需要通过监控屏幕控制设备,无需频繁的过程中干预工作,可以有效保证他们在高温高压环境下的安全。
最后,自动辊缝控制系统具有可靠性和可扩展性。
现代化带钢冷连轧机组的自动辊缝控制系统在设计时遵循了模块化、标准化的原则,可以根据实际生产需求和技术要求优化配置设备,满足多种生产模式和生产工艺的要求。
此外,控制系统还支持多点控制、网络化管理和数据归档等多种功能,对于提高生产线的自动化率、可控性和智能化水平具有重要意义。
冷轧平整机工作辊弯辊控制系统的国产化应用研究

S n cz t n Ap l a i n S u y o l Be d n n r l S se i iia i p i to t d f Ro l o c n i g Co t o y t m
f r W o k l f Cod le Te pe i o r Ro l o l Ro ld m rM l l
i d p n e t n el c u l r p r r h s f e t r r e a d o e u e h c s f e u p n n e e d n i tl t a p o e t i t o n e p i s n t r d c t e o t q i me t e y g s o a d ma n e a c . T e i i iai n t d f t e ol e d n s se n itn n e h sn c z t su y o h r l o b n i g y t m wa c n u t d s o d ce . T e h
p r mi n C i a i amo t it d c d a ra , S h ot o q ime ta d mane a c s e l i hn s l s n r u e b o d l o O te c s f e up n n itn n e i v r ih T e ak t a rn a d se l e trrss i hn a e i o fr tc nq e wi ey hg . h ts h t io n te nep ie n C ia fc s om e h iu Nhomakorabeat t h
【 摘
要 】 目前国 内冷轧平整机 工作辊弯辊控制系统大多数采取 了整套 引进 的做法 , 其设 备和运行维护
《冷轧弯辊控制原理》课件

解释冷轧弯辊系统的工作原理, 包括弯辊的结构、运动方式和 力学原理。
介绍冷轧工艺中的关键参数, 如弯辊的压力、,包括钢材 质量控制、轧制过程和辊形调 整的要点。
弯辊控制系统的控制策略
速度控制
讨论使用速度控制策略来调 整冷轧机弯辊转速,以实现 更精确的轧制。
控制系统
1 自动化控制
了解冷轧弯辊控制系统 的基本原理,掌握其自 动化控制的关键技术。
2 传感器与反馈
介绍控制系统中所涉及 的传感器装置和反馈机 制,强调其在冷轧弯辊 控制中的重要性。
3 控制策略
详细解析控制系统的策 略,包括开环控制和闭 环控制的运作原理和实 现方式。
弯辊系统原理
工作原理
工艺参数
设计弯辊控制系统时必须考虑其可靠性和故障 诊断能力,以减少停机时间和维修工作。
弯辊控制系统的现场应用
钢铁行业
介绍弯辊控制系统在钢铁制造 业中的广泛应用,展示其对生 产效率和质量的重要性。
加工厂
工业领域
探讨弯辊控制系统在各种加工 厂中的实际应用,如钢板冷轧、 铝箔生产等。
说明在工业领域中,弯辊控制 系统如何提升生产效率和产品 质量。
压力控制
探讨利用压力控制策略来调 整辊缝压力,以确保冷轧过 程中的均匀性和质量。
位置控制
说明如何使用位置反馈控制 策略来调整辊缝间距,以适 应不同的生产需要。
弯辊控制系统的设计要求
稳定性 精度 可靠性
确保控制系统具有良好的动态响应和稳定性, 以应对不同工况下的变化。
要求控制系统能够在制程中提供高精度的辊缝 位置控制和质量保证。
总结与展望
1 总结成果
回顾课件中介绍的关键内容,总结冷轧弯辊控制系统的原理和应用。
冷轧机弯辊伺服系统控制方案

自动化控制・ Automatic Control270 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】液压伺服控制 弯辊系统 正弯 负弯1 液压弯辊伺服系统在原理方面,弯辊伺服系统对板型控制的目的是通过对辊缝形状实现的。
具体到液压弯辊伺服系统则是以作用力于工作辊辊液端液压缸产生一定的推力,此推力再向工作辊辊端轴承座上产生作用力,促使工作辊发生附加弯曲,进而促使轧辊改变有效挠度最终改变辊缝形状,以实现板型修正的最终目的。
液压伺服控制系统的基本组成元件主要有指令输入元件;反馈检测元件;放大、转换、控制元件;比较元件;液压执行元件和控制对象等。
根据不同的分类方式进行分类:(1)以误差信号的产生以及误差信号的传递方式不同为划分依据,可以划分为三类,其一是机械——液压伺服控制系统;其二是气动——液压伺服控制系统;其三是电气——液压伺服控制系统。
(2)以液压控制元件的不同作为划分依据,则可以划分为两类,其一是阀控系统;其二是泵控系统;(3)以被控制物理量不同为依据可以划分为以下几种,其一是位置伺服控制系统;其二是力伺服控制系统;其三则是速度伺服控制系统。
在工程实践中我们选用了新一代的伺服阀,该阀动态响应快,具有很强的抗污染能力,很高的控制精度,这样就能够保证工作的可靠性和系统响应速度、稳定性和高精度的要求。
此外,检测精度很大程度上控制了控制精度,因此,在实践工作中,对于伺服系统而言,在压力检测方面采用了HYDAC 公司的压力传感器。
2 弯辊伺服控制系统的两种组成方式在组成方式方面,作为典型的液压伺服控制系统的液压弯辊控制系统可以进行两种方冷轧机弯辊伺服系统控制方案文/刘敬磊式的划分,其一是手动调节系统;其二是自动调节系统。
在手动调节系统方式中,弯辊力的大小给定灵活,主要是通过操作者根据观测板型、计算或者操作板型的经验进行设定的,不需要任何主控量或者干扰量的反馈调节。
六辊可逆冷轧机横移-弯辊系统的控制
六辊可逆冷轧机横移/弯辊系统的控制
郝宏昭,米进周
(西安重型机械研究所第六研究室,陕西西安710032) [摘要]简要介绍了六辊可逆轧机(UCM轧机)的特点,描述了六辊可逆冷轧机横移/弯辊系统的控制过程。
【关键词]六辊可逆冷轧机;中间辊横移;工作辊弯辊;中间辊弯辊
O前言 随着国民经济的高速发展,市场对成品宽度
带材板形得到了更好的控制。本轧机中间辊只有
正弯辊。
4.1弯辊控制方法、
对弯辊的控制采用压力闭环控制,其控制框
图如图7所示。
[编辑:魏方]
・227・
置,方可进行换辊操作。否则将会损坏轧机辊系。
单独调节,也可以两边同时调节。
4弯辊系统的特点及控制原理
在轧制过程中,弯辊是最为常见的用于对带 刚凸度和板平直度进行连续控制的方法之一。通 过控制轧机轧辊两侧的弯辊力,改变轧辊的辊形。
弯辊控制用于控制轧机出口侧带材的板形。如果 弯辊力使辊缝减小,称之为正弯辊;反之,如果弯
E
此外通过硬线连接方式与AC,C系统通信以协助
AGC系统实现快速卸荷,与工艺PI£之间通过 MPI网通信实现AGC泵站及弯辊泵站的远程起停
匡
r——。一
及故障状态显示,控制框图如5所示。
3中间辊横移系统的特点及控制原理
中间辊横移是控制板形精度的方法之二。它
亡 E
图4中间辊正弯辊
根据带材宽度的不同而轴向移动上下两个中间
馈达到平衡,执行器输出为零,油缸不再动作。当 给定再次增减时,反馈随之增减,执行器驱动油缸
要解决这个控制问题,必须要转换思维方式,
从另外一个角度去看这个问题。首先应该明确, 其实所谓的同步只是从宏观上来说的,它实际上
冷弯成型轧辊的数字化仿真应用

冷弯成型轧辊的数字化仿真应用作者:Albert Sedlmaier, A.Z. Abee随着冷弯及Hydro成形行业对加工工艺技术的要求不断提高以及复杂异型产品加工的需要,仿真软件在冷弯成型行业的应用正在普及。
本文论述了冷弯成型工艺的仿真技术已经成为企业全面质量管理的基本组成部分,在冷弯行业的领先企业中的应用。
本文展示了在企业中运用有限元分析方法在限定的时间内作出成型轧辊设计,不但是可行的,而且是值得推广和应用于实际的。
关键词:冷弯成型有限元仿真质量管理轧辊设计1.引言1.1 冷弯成型工艺冷弯成型是用成组渐变的型面轧辊,在常温下将金属板带通过连续弯曲变形成为所要求的最终截面的板金属成形的工艺方法。
随着冷弯成型产品的复杂性增加和精度要求的提高,掌握这种成型工艺的技术诀窍,成为提高冷弯成型企业不可缺少的竞争能力。
近来冷弯成型产品作为Hydro成形这种加工业的半成品,使得冷弯成型产品的市场需求不断增加。
掌握这种成型工艺的技术诀窍是管件和冷弯型材的基本质量要求,是决定性的竞争要素。
1.2 存在问题主要的难点在于对高品质产品的加工工艺技术缺乏足够和明确的认识;成形轧辊只在某些特定的部位对成形起作用,大部分板的变形(希望的和不希望的)并不发生在轧辊孔型中的准确位置,而是发生在相随的一对轧辊导入区域,这个变形区域称为变形区长度。
在冷弯成型中的主要问题产生在轧辊的安装调试过程,这常常是由于产品的缺陷和超过公差,而需要对轧辊修正和重新加工。
1 COPRA冷弯成型轧辊设计和分析服务中心,德国data M 软件有限责任公司2 北方工业大学机电工程研究所,北京1000411.3 有限元仿真数字化仿真是研究和掌握冷弯成型工艺技术的有效工具。
然而,过长的计算时间使得有限元仿真难以满足企业快速轧辊设计的要求。
本文介绍了仿真技术在轧辊设计的实际应用,冷弯成型工艺技术研究的成果。
需要说明的是下面的实例只给出了部分的结果和获得的经验,这主要是由于涉及到受委托客户公司的机密。
轧钢机系统的模拟控制

M1 ) 起动 运 转 ,轧制 方 向为 从 右 向左轧 制 。左 右侧 道 电机
( M2 和M3 )启 动 ,逆 时针运转 ,向左输 送 。 ( 2 )设 备启 动
3 秒后 ,P L C 检测有无等待的轧件,传感器s 1 的信号为O N ( 表
保护。4 ) P L C 选用继电器输 出型。5 1 P L C自身配有2 4 V 直流
电源 ,外 接负载 时考虑 其供 电容量 . P L C 接地 端采 用第 三种接
地方式 ,提 高抗 干扰能 力 。
号 ,即s 2 有信号为O N。 ( 5 )s 2 信号消失表示轧件 已经通 过了轧。 ( 6) 1 秒后启动左侧道 右输送。 ( 7) S 1 信号为
三、 控 制方 案
1 ) 轧钢 机控制 系统 电动 机均 由交流 接触 器完成 起 ,停控 制 ,电机M3 要采 用正 ,反转控 制 。2 ) 轧 钢机系统 中设两 个传 感器 一个 检测有无 钢板 ,还有 一个检测 钢板 是否到位 。 3 1 负 载 回路 和控制 回路 以及 P L C 控 制 回路 采用 熔 断器 ,实现 短路
转 ,信号指示灯MZ 亮。s l 的信号消失 ( 即为O F F),检测
传 送带 上钢 板 到位 的传感 器 S 2 有 信号 ( 为O N),表 示 钢板 到位 ,电磁 阀动作 ,指示信号 灯Y U1 亮 ,电机M3 反转 ,指示 信号 灯MF 亮 。此 时 ,Y 给一 向下 压下量 ,S 2 信号消 失 ,s 1 有 信号 ,电机M3 正 转… …如 此重复上 述过程 。
一
、
控 制 要 求
板 ,检 测传 送 带上 有无 钢板 的传感 器 S l 有信 号 ( 为O N ), 表示 有钢板 ,则 电机M3 正传 ,S l 的信 号消失 ( 为O F F),检
莱钢冷轧1500液压辊缝控制系统 (1)
莱钢冷轧1500液压辊缝控制系统王海鹏(山东莱芜钢铁集团有限公司 自动化部 山东 莱芜 271104)摘 要: 对可逆式轧机的液压辊缝控制系统的功能和原理进行深入的分析,详细分析HGC 在可逆式冷轧机中的应用,机架的液压控制是轧机运行所必须的一部分,其设计合理与否,直接影响到生产的效率和产品质量。
关键词: 可逆式冷轧机;液压辊缝;HGC ;工作辊弯辊力;中间辊弯辊力中图分类号:TG335.5 文献标识码:A 文章编号:1671-7597(2011)0320106-011 液压辊缝控制系统简介作过程中的值相匹配。
这种配置确保在任何时候无冲击切换。
在正常的操作过程中,自动化系统依据操作条件切换位置控制到轧制力控制或者反之液压辊缝控制系统,简称HGC ,是用来完成厚度及板形等工艺控制和从轧制力控制到位置控制。
协调机架的相关顺序控制以及优化辊缝控制性能,主要包括机架的标定, 3 轧辊弯辊系统液压辊缝控制,轧制线调整,轧辊弯辊控制等。
其中,压下系统由2个伺服阀分别控制2个液压缸实现轧钢,弯辊系统由32个液压缸组成,实现钢轧辊弯辊系统包括工作辊弯辊和中间辊弯辊,弯辊系统可以实现下列板板型控制,平衡缸系统配合压下系统提供合适的轧制力。
功能,通过调整工作辊的正负弯辊使辊缝适应带钢的板型,通过弯辊力的2 压下系统限幅来监控轧辊的接触,通过轧辊平衡来补偿轧辊自重。
工作辊和中间辊装有弯辊液压缸,液压缸连到带压力反馈的设备的伺服阀。
弯辊控制用来2.1 位置控制补偿由于轧制力的改变、温度特性,带钢板形等引起的辊缝辊形偏差。
控辊缝位置值是传动侧和操作侧液压缸实际的位置值的平均值,并通过制器自身被设计成PI 调解器,控制器输出=P-分量+I-分量。
为了避免阶跃辊缝的校正值来进行补偿。
这个位置控制是通过一个P-控制器算法和一个响应,所有的设定值都传递到一个斜坡发生器。
积分控制器来补偿伺服阀的零漂调整。
3.1 工作辊弯辊系统控制每个液压缸装配有一个位置传感器,测量值传送到位置控制器。
冷轧弯辊控制原理

弯辊工艺适用于各种金属材料的冷轧生产,如钢 板、铝板、铜板等,具有广泛的应用前景。
弯辊工艺参数设定与调整
弯辊力设定
根据金属材料的性能、厚度和宽度等因素,合理设定弯辊力的大小。过大的弯辊力可能导 致轧辊过度弯曲,损坏设备;过小的弯辊力则无法有效改善板形质量。
轧辊间隙调整
通过调整轧辊间隙的大小和形状,实现对金属坯料横向厚度分布的控制。轧辊间隙的调整 需要根据金属材料的性能和产品要求进行精确计算和操作。
气动执行机构
以压缩空气为动力源,驱 动气缸完成弯辊动作,适 用于轻载、高速场合。
控制电路设计与实现
主控电路
驱动电路
采用高性能微处理器或DSP芯片作为核心, 负责数据处理、控制算法实现等功能。
根据执行机构类型设计相应的驱动电路, 如电机驱动器、液压阀驱动器等。
信号调理电路
通信接口电路
对传感器输出的微弱信号进行调理,包括 放大、滤波、A/D转换等处理,以满足控制 系统对信号精度和稳定性的要求。
冷轧弯辊控制原理
contents
目录
• 弯辊控制系统概述 • 冷轧弯辊工艺原理 • 弯辊控制系统硬件设计 • 弯辊控制系统软件设计 • 弯辊控制系统性能评估与优化 • 冷轧弯辊技术应用前景展望
01 弯辊控制系统概述
弯辊定义及作用
弯辊定义
弯辊是指在轧制过程中,通过调整轧辊的弯曲程度,从而改变轧制力分布和轧 后板材形状的一种技术。
探索在金属板材、带材、线材 等多种形态金属加工中的应用 可能性。
结合其他金属加工技术,形成 综合性的金属加工解决方案, 满足不同领域的需求。
未来发展趋势预测
冷轧弯辊技术将朝着更高精度、更智 能化的方向发展,实现更加精细的控 制和更高的生产效率。
轧钢机系统的模拟控制

目录1.绪论 (2)2.课题介绍 (7)3.课程设计内容及要求 (9)3.1 控制要求 (9)3.2 设计要求 (11)3.3 控制原理 (11)3.4 控制方案 (11)4.硬件设计 (12)4.1硬件设计要求轧钢机系统结构 (12)4.2元器件选择 (13)4.3元器件清单 (14)4.4硬件控制原理图 (14)5.软件设计 (16)5.1 I/O 地址表 (17)5.2 程序设计及说明 (18)6.运行调试 (20)7.小结 (22)附录 (23)参考文献 (23)1.主电路 (24)2.控制电路 (25)3.总梯形 (26)1.绪论可编程序控制器,英文称Programmable Logical Controller,简称PLC。
它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计,它采用可编程序的存储器,用以在其内部存储执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接口,控制各种类型的机械或生产过程。
PLC是微机技术及传统的继电接触控制技术相结合的产物,它克服了继电接触控制系统中的机械触点的复杂接线、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场电气操作维修人员的技能及习惯,特别是PLC的程序编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程序编制形象、直观、方便易学;调试及查错也都很方便。
用户在购到所需的PLC后,只需按说明书的提示,做少量的接线和简易的用户程序的编制工作,就可灵活方便地将PLC应用于生产实践。
随着科学技术的不断发展,人们的日常生活和生产活动大量的使用自动化控制,不仅节约了人力资源,而且很大程度的提高了生产效率,又进一步的促进了生产力快速发展,并不断的丰富着人们的生活。
早期的自动控制系统是依靠继电-接触器来实现的,其特点是:结构简单、价格低廉、抗干扰能力强,可以实现集中控制和远距离控制,但是其采用固定接线,通用性和灵活性差;又采用触点的开关动作,工作频率低,触点易损坏,可靠性差。
650单机架轧机建立其液压弯辊伺服控制系统建立数学模型研究毕业论文

The650single stand millis discussed in this paper,and we will design the mathematical model aboutthe hydraulic servo control system of bending roll.Furthermore we will research and improve the accuracy, stability and rapidity of the model by using the matlab.At the same time ,we will know the effects of various parameters on the system. Through thispaper we will know how to design hydraulic roll bending system and the mechanism, which providing technical support for the future related research.
摘要
随着现代工业的发展,钢板和带钢作为在经济建设中应用最广泛的钢材,对钢铁企业提供的板带钢的尺寸精度和形状精度提出了更高的要求。
冷轧机工作辊弯辊控制系统模拟
中 图分类 号 : T F 3 4 1 . 6 : T P 2 7 3 文献标 识码 : A 文 章编 号 : 1 6 7 4 . 1 0 4 8 ( 2 0 1 4 ) 0 1 . 0 0 1 0 . 0 7
冷轧板形和厚度及其精度是衡量板带质量的重要指标 。板形控制的核心是对辊缝形状的控制 。液 压弯辊控制系统是通过装设在弯辊缸块上的液压缸向工作辊或中间辊辊颈施加液压弯辊力 , 使轧辊产生 附加弯 曲, 来瞬时改变轧辊的有效凸度 , 从而改变承载辊缝形状和轧后带钢 的延伸沿横向的分布 , 以补偿
输入电流与阀芯位置反馈 电流信号的差值作为伺服 阀内置放大器的输入 , 内置放大器输出电流信号驱动
伺服阀的力矩 马达 , 力矩马达的摆动导致两侧喷嘴间隙发生变化 , 主阀芯两侧油压失去平衡 而移动, 伺服
阀出口油压达到设定值。控制回路中积分环节主要是补偿伺 服阀的机械零偏和温度零漂 , 使正常工作时
由于轧制压力和轧辊温度等工艺因素的变化而产生的辊缝形状 的变化¨ 。轧辊弯辊是板形控制中最为活
跃和有效的因素 , 是板带轧制生产中最主要的保证成品板形质量的手段之一_ 2 ] 。实际的弯辊系统多采用 半闭环控制系统 , 用伺服阀出口的压力替代弯辊缸 的实际压力 , 其控制精度较低。实际弯辊力响应时间
1 1 4 0 0 9 ; 3 臌 钢集 团钢铁研究 院
摘 要 : 冷轧机弯辊集自动控制技术、 液压伺服技术、 流体动力学、 轧制辊 系变形等学科于一体, 用传统传递函
数建立 的系统数 学模 型计算结果 与实际差距较 大。本 文基 于 MA T L AB的 S I MUL 1 NK平台 , 应 用影 响函数法精
究竟滞后半闭环控制系统多少 , 未见类似研究结果。
智能化冷弯成形轧辊虚拟制造系统的研究

A b t a t B s d o h n l sso it a n f c u ig me h d ,a riiil n e l e c - a e it a n f c u ig s s e s r c : a e n t e a ay i fv r u l ma u a t rn t o s n a tf a t l g n e b s d vr u l c i i ma u a t rn y tm
K e r s:o lr it a n f c u i g;a t iili t l g n e o l g s ra e y wo d r l ;vr u lma u a t rn e r i ca n el e c ;r l n u f c f i i
冷弯 型 钢 和焊 管 是 现 代 钢 铁 工 业 的 深 加 工 产 品, 是应 用广 泛的金 属型材 , 随着人 们对 它们功 能 的 要求 愈来愈 多 , 其断 面几何 形状越来 越复 杂 , 以轧 所
文 章编 号 : 0 8 1 3 ( 0 0 0 — 3 1O 1 0 — 5 4 2 1 ) 50 1 一 3
智 能化 冷弯 成形 轧辊 虚 拟 制造 系 统 的研 究
张 玉彬 李 国 昌 , , 赵 娟 , 卫平 孙
(. 1 河北科技 大学信息科 学与 工程 学院 , 河北石 家庄
石家庄 00 1 ) 5 0 8
第 2 卷 第 5期 7
2 0年பைடு நூலகம்9月 01
河 北 工 业 科 技
He e J u n 1o n u t il ce c n c n l g b i o r a f d s ra in e a d Te h o o y I S
冷轧弯辊控制原理

冷轧弯辊控制原理
一、力控制原理
冷轧弯辊的力控制原理是通过控制压力机的液压系统,调整冷轧弯辊的压下力来控制轧制带材厚度。
具体步骤如下:
1.传感器测量:在冷轧机上设置力传感器,用于测量冷轧弯辊的压下力。
测量到的数据会传递给控制系统。
2.控制系统处理:控制系统接收到传感器测量的压下力数据后,与参考厚度进行比较,并将计算结果反馈给液压系统。
3.液压系统调整:液压系统根据控制系统反馈的压下力调整液压缸的工作压力,使其与目标压力保持一致。
这样可以控制冷轧弯辊施加在带材上的压下力,从而调整轧制带材的厚度。
二、位移控制原理
冷轧弯辊的位移控制原理是通过调整冷轧机辊缝的宽度,来控制轧制带材的形状。
具体步骤如下:
1.传感器测量:在冷轧机上设置位移传感器,用于测量冷轧弯辊的辊缝宽度。
测量到的数据会传递给控制系统。
2.控制系统处理:控制系统接收到传感器测量的辊缝宽度数据后,与目标宽度进行比较,并将计算结果反馈给液压系统。
3.液压系统调整:液压系统根据控制系统反馈的位移调整液压缸的工作位置,从而控制冷轧弯辊的位移。
这样可以调整辊缝的宽度,进而控制轧制带材的形状。
综上所述,冷轧弯辊控制原理主要通过力控制和位移控制实现对轧制带材厚度和形状的调整。
在实际操作中,控制系统会根据预设的参数和参考值,通过反馈信号实时调整冷轧弯辊的力和位移,以实现轧制过程中对带材的精确控制。
冷连轧机弯辊力伺服控制系统仿真分析

课题六、1450冷连轧机弯辊力伺服控制系统仿真分析
1)弯辊力控制简图
2)主要参数:
序号参数项参数值单位备注1最大负载力35t
2弯辊缸行程160mm
弯辊缸直径200mm
弯辊缸杆径150mm
3液压油源恒压油源恒压变量泵4工作压力25MPa
5有杆腔背压3MPa
6油液密度850Kg/m3
7油液粘度32mm2/s
8工作温度40℃
9压力检测范围0-40MPa
10压力检测输出有杆腔压力传感器4-20 mA
11 管道外径42mm
12 管道壁厚6mm
13 管道长度6m
3)负载参数:
每个弯辊缸按照动能相等的原理进行质量和刚度的计算:m=5200kg, k1=310MN/m。
而负载的等效黏性阻尼系数c1=140KNs/m。
4)电液伺服阀参数:
D661电液伺服阀,由样本得到其动态特性参数如下:ωsv=100Hz,ξsv=0.7。
该阀在7MPa压降时,流量为160L/min,阀芯最大开口对应电流值为±10mA,
5)传感器
欢迎您的下载,资料仅供参考!。
1450冷连轧机弯辊力伺服控制系统仿真分析

Q=
+
+
图2 电 液伺 服 弯辊 力控 制 系统 的 原 理 图
压缸位移为 ) 【 p , C 为液压缸总泄露系数, 液压油等效容积模量
为 艮。
3项 目数据与设计任务
序 号 1
2 3 ‘ S
参 数 项 量 大 负 囊 力
√
轧制过程中, 要根据板带的实际形状来实时的去调节弯辊力的
=
. j
大小 。 使得在预设定的弯 辊力值 附近波动 。 由图 1 可 以画出电
液伺服弯辊力控制系统的原理图, 见图2 。 w 为伺服阀阀芯面积梯度 ,伺服阀的流量为伺服 阀的工
作压力为 P L , 流量系数为 C d , P I 为供油压力。
序号
参数项
参数值
单位
4 x 2 5 = ( 一 AR ) × 3
可得 则杆直径
缸直径
l
固有频率 w
8 0
H z
=O。0 1 4 4 m2 AR =O 。0 0 3 6 m2 d i6 f 8 mm
D=1 3 6 mm
2
阻尼比
O 。9 5
该伺服 阀压降为 7 MP a时 , 流量为 4 0 L / mi n, 阀芯最大开 口对应 电流值为 ±1 0 mA。
6
管道长度
6
7
液压缸 控制 腔初始容积 、 , | 5 。7 6 ’ 1
m|
形成 的固有频率为,
8
液压缸总泄露系数
5 ×l ( y I ‘
m3 / p ,
9
一
折算到液压缸活塞上的等 5 2 0 0 效质量
冷矫机弯辊控制的完善与优化研究论文
冷矫机弯辊控制的完善与优化研究论文冷矫机弯辊控制的完善与优化研究论文摘要:摘要:本文据国内矫直机的使用情况,提出完善弯辊功能,解决辊缝标定清零及运行中的问题,提升轧钢厂运行效率与产品质量。
关键词:关键词:冷矫机 PLC系统弯辊功能在当前钢铁产能过剩情况,钢铁市场竞争日趋激烈的严峻形势下,客户对钢材的板型、表面关键词:计算机技术论文发表,发表关于计算机的论文,计算机网络技术论文发表摘要:本文据国内矫直机的使用情况,提出完善弯辊功能,解决辊缝标定清零及运行中的问题,提升轧钢厂运行效率与产品质量。
关键词:关键词:冷矫机 PLC系统弯辊功能在当前钢铁产能过剩情况,钢铁市场竞争日趋激烈的严峻形势下,客户对钢材的板型、表面质量要求越来越高。
本文根据国内矫直机的使用情况,设计出完善弯辊功能程序,解决辊缝标定清零及运行中的问题,提升轧钢厂运行效率与产品质量。
1 矫直机弯辊功能的原理矫直机的原理是辊子的位置与被矫直制品运动方向成某种角度,两个或三个大的是主动压力辊,由电动机带动作同方向旋转,另一边的`若干个小辊是从动的压力辊,靠着旋转着的圆棒或管材摩擦力使之旋转的。
为了达到辊子对制品所要求的压缩,这些小辊可以同时或分别向前或向后调整位置,钢材被辊子咬入之后,不断地作直线或旋转运动,因而使制品承受各方面的压缩、弯曲、压扁等变形,最后达到矫直的目的。
起设施主要将上万向轴套上夹紧块与上万向轴套的接触面为设计为倒V型接触面,并将下万向轴套下夹紧块与下万向轴套的接触面为V型接触面。
V型设计的夹紧块与上万向轴套的外圆呈两点接触,而且接触点控制力指向万向轴套圆心,因此定位更加准确;同时,由于上万向轴套下夹紧块的数量为两只,且两只下夹紧块与上万向轴套的接触面为V型接触面,更为有效的控制了万向轴套的定位精度,不易受万向轴套外圆面尺寸误差造成定位偏差的影响。
为冷矫直机换辊提供了一个较好的夹紧装置。
2 矫直机弯辊系统机械设计本文设计中对冷矫机弯辊系统进行完善,特别是硬件问题,包括伺服阀、压力传感器、位移传感器的安装。
1500轧机窜辊液压控制系统仿真分析
1500轧机窜辊液压控制系统仿真分析组员:卢彪、林加城冯续、桑子涵、董海洋班级:机控1班指导老师:张伟、孔祥东2013年7月目录一、轧机窜辊技术 (2)1.1轧机窜辊技术概述 (2)二、伺服阀 (3)2.1伺服阀选用 (3)2.2伺服阀静态特性 (4)三、传感器的选用 (4)四、阀控非对称液压缸系统数学建模 (5)4.1比例阀的负载流量方程 (6)4.2非对称液压缸的负载流量方程 (7)4.3液压缸和负载的力平衡方程 (9)4.4阀控非对称液压缸位置闭环控制系统数学模型 (10)五、阀控非对称液压缸位置控制系统动静特性研究 (11)5.2系统数学模型参数确定 (11)5.3 阀控非对称液压缸位置控制系统稳定性分析 (14)5.3阀控非对称液压缸位置控制系统频率特性分析 (16)5.4系统的阶跃响应特性分析 (19)六、结论 (20)一、轧机窜辊技术1.1轧机窜辊技术概述所谓工作辊窜辊就是工作辊就是工作辊沿轴线方向上的水平移动,工作辊的窜辊是均匀工作辊磨损的优选措施,同时对提高弯辊的功效,降低工作辊的过度挠曲及减小有害接触区有一定的作用。
工作辊的窜辊一般有四个液压缸进行控制,分别分布在上下工作辊操作侧的入口侧和出口侧,每个液压缸上都有一个位置传感器,通过传感器检测工作辊的窜动位置,在窜动过程中必须保持上下工作辊偏离中心线的位置同步、上工作辊入口侧和出口侧两个液压缸的位置同步、下工作辊入口侧和出口侧两个液压缸的位置同步,这些都通过传感器检测的数值反馈到程序内部进行计算并把计算的结果输出到对应的伺服阀来进行调节。
工作辊的窜辊分为正窜和负窜:所谓正窜就是指上工作辊向驱动侧移动,下工作辊向操作侧移动,使辊的弯曲度增加,能有效减少边部波浪;所谓负窜是指上工作辊向操作侧移动,下工作辊向驱动侧移动,使辊的弯曲度减小,使边部波浪产生的可能性增加。
窜辊是在静态状态下进行的,在热连轧项目中应用在精轧部分,在自动模式下窜动的位置由二级(过程自动化)给定,手动模式下操作员可以根据经验值进行设定值的调整,窜辊在板带材进入机架前已经提前摆好位置并锁定,在轧制过程中是不允许进行窜动的,窜动的目的主要是减小轧辊的磨损,但对板带材的平整度控制也有一定的影响,另外在换辊时窜动一定的位置可以方便上工作辊落在下工作辊的支撑位置方便工作辊的抽出。
1450冷连轧机弯辊力伺服控制系统仿真分析
1450冷连轧机弯辊力伺服控制系统仿真分析第1章绪论 (3)1.1课题背景 (3)1.2 液压弯辊装置 (3)1.2.1弯曲工作辊 (3)1.2.2弯曲支撑辊 (4)1.3 PID控制的基本原理 (5)1.4液压伺服控制系统介绍 (6)1.5液压弯辊力伺服控制系统 (6)1.6课题研究的主要内容 (6)第2章弯辊力电液伺服系统的数学模型 (7)2.1弯辊力电液伺服系统的简化分析 (7)2.2弯辊力电液伺服系统的数学模型 (8)2.2.1电液伺服阀的数学模型 (8)2.2.2三通阀控缸的数学模型 (9)2.2.3电液力控制数学模型 (12)第3章液压弯辊控制系统的仿真研究 (14)3.1仿真参数的确定及说明 (14)3.2参数计算 (15)3.3系统参数汇总 (16)3.4系统的频域响应分析 (17)3.5系统的时间响应特性 (18)3.6本章小结 (18)第1章绪论1.1课题背景液压弯辊技术是一种最常用也最有效的板形控制手段,该技术首先出现于60年代,由于其技术上的难度和基础研究起步较晚。
近几年来随着生产的发展和科学技术的进步,对于板带材的几何尺寸精度的要求越来越严格,产品质量越来越难以满足市场的要求。
因此,提高液压弯辊技术水平将成为板带加工技术发展的重要课题之一。
随着钢铁行业的飞速发展,对于弯辊技术的研究成了热门课题,其中对于轧制理论和弯辊力的设定有了一些进步。
但是由于液压弯辊系统是一套涵盖液压和轧制的综合系统,液压系统的设计水平直接影响整个弯辊系统的性能,特别是液压系统的稳定性和动态响应性能,更是关系到整个弯辊系统的成败。
目前国内对液压弯辊力控制系统的研究还较少,对液压弯辊系统的设计,一般是参照国外同类液压弯辊系统相类比来进行设计,类比的设计方法由于缺乏设计的理论依据,有很大的缺陷性,只能用于型号相似的弯辊系统。
本文针对1450冷连轧机液压弯辊系统进行系统建模、动静态特性分析、仿真,以深入研究整个系统,为设计提供依据,并在此基础上,采用PID控制的基本原理,使液压弯辊系统的设计过程能够科学化、简单化、快速化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第37卷第1期2014年2月V ol.37No.1Feb.2014辽宁科技大学学报Journal of University of Science and Technology Liaoning冷轧机工作辊弯辊控制系统模拟赵荣1,廖德勇2,刘宝权3(1.鞍山技师学院机械系,辽宁鞍山114020;2.鞍钢股份公司大型厂,辽宁鞍山114009;3.鞍钢集团钢铁研究院辽宁鞍山114009)摘要:冷轧机弯辊集自动控制技术、液压伺服技术、流体动力学、轧制辊系变形等学科于一体,用传统传递函数建立的系统数学模型计算结果与实际差距较大。
本文基于MATLAB的SIMULINK平台,应用影响函数法精确地计算了弯辊缸的负载等效刚度,建立了能够详尽描述弯辊系统的数学模型。
模拟结果表明,半闭环弯辊系统的阶跃响应时间为0.115s,与实测阶跃响应吻合。
考虑管道影响后,实际弯辊力响应时间为半闭环弯辊系统的2倍。
关键词:冷轧机工作辊;控制系统模拟;影响函数法;液压管路中图分类号:TF341.6:TP273文献标识码:A文章编号:1674-1048(2014)01-0010-07冷轧板形和厚度及其精度是衡量板带质量的重要指标。
板形控制的核心是对辊缝形状的控制。
液压弯辊控制系统是通过装设在弯辊缸块上的液压缸向工作辊或中间辊辊颈施加液压弯辊力,使轧辊产生附加弯曲,来瞬时改变轧辊的有效凸度,从而改变承载辊缝形状和轧后带钢的延伸沿横向的分布,以补偿由于轧制压力和轧辊温度等工艺因素的变化而产生的辊缝形状的变化[1]。
轧辊弯辊是板形控制中最为活跃和有效的因素,是板带轧制生产中最主要的保证成品板形质量的手段之一[2]。
实际的弯辊系统多采用半闭环控制系统,用伺服阀出口的压力替代弯辊缸的实际压力,其控制精度较低。
实际弯辊力响应时间究竟滞后半闭环控制系统多少,未见类似研究结果。
实际轧制过程中,受轧辊偏心、辊缝润滑剂层厚度变化、轧辊轴承油膜厚度变化、控制系统的干扰、入口厚度的变化、硬度变化、平直度变化等影响必然导致轧制力变化,轧制力波动必然导致出口厚度波动,致使产品出现板形缺陷。
根据板形良好条件,弯辊力必须对轧制力的波动进行快速实时补偿,并要求具有较高的响应速度、无超调、无震荡和高稳态精度。
由于参数难于获取或模型难于实现,以往进行模拟计算时系统做了简化处理,从而对液压伺服系统模拟结果的真实性产生较大的影响[3]。
采用MATLAB软件的SIMULINK模拟平台对弯辊控制系统进行动态模拟分析,可以方便灵活地更改参数,为提高系统的动静态性能、产品质量提供可行性方案。
本文的工作辊弯辊系统模拟考虑管道的影响,建立了能准确描述系统特性的弹性负载力控制系统模型,以实际应用的某冷轧厂4号线1780冷轧机组的工作辊弯辊系统作为模拟对象,并将模拟的结果与实际轧制数据进行比较。
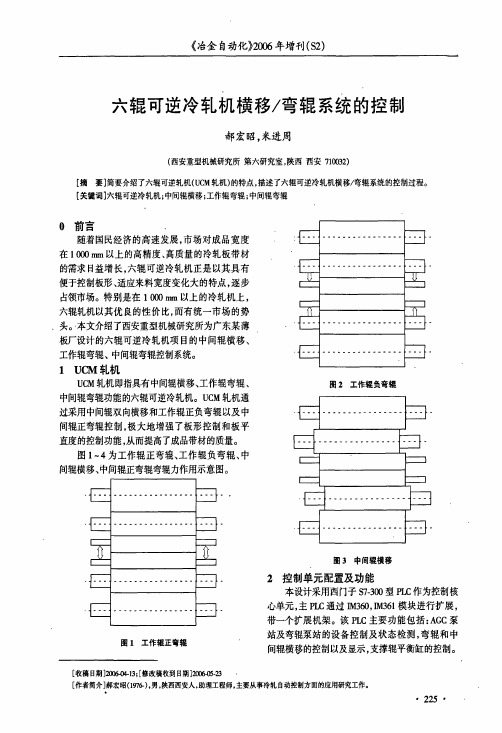
1系统组成图1所示为操作侧上下工作辊弯辊缸的半闭环控制回路。
正负弯辊由安装在伺服阀后液压油路上的换向阀根据一级计算机发出的正负弯指令实现自动切换。
伺服阀出口的油压通过压力传感器将油压信号转换为电流信号,电流信号经过隔离放大器转换为±10V电压信号,该反馈电压信号通过A/D转换为数收稿日期:2013-08-22。
作者简介:赵荣(1964—),女,辽宁鞍山人,副教授。
第1期字量信号,再转换成油压,油压乘以相应的弯辊缸的个数及活塞面积或杆侧面积即为相应的实际弯辊力。
不同操作模式的弯辊力设定值,与反馈的实际弯辊力值相比较,差值经过数字PI 运算、限幅,经过D/A 转换为±10V 电压,再经过隔离放大器转换为±10mA 的电流信号,该电流作为伺服阀的输入,伺服阀的输入电流与阀芯位置反馈电流信号的差值作为伺服阀内置放大器的输入,内置放大器输出电流信号驱动伺服阀的力矩马达,力矩马达的摆动导致两侧喷嘴间隙发生变化,主阀芯两侧油压失去平衡而移动,伺服阀出口油压达到设定值。
控制回路中积分环节主要是补偿伺服阀的机械零偏和温度零漂,使正常工作时伺服阀的输入电流稳定在±0.5mA 内,以保证伺服阀的高频响应。
图1工作辊弯辊系统的组成Fig.1System structure of work roll bending control system2数学模型2.1伺服阀的基本方程用于工作辊弯辊的伺服阀为二级电液伺服阀,型号为MOOG D765,其本身固有频率高于50Hz ,弯辊缸的固有频率也高于50Hz ,工作辊弯辊控制系统的传递函数为[4]W v ()S =Q ()S I ()S =K v S 2ω2v +2ξv S ωv +1(1)式中:Q ()S 为伺服阀输出油液流量,m 3/s ;I ()S 为伺服阀输入电流,A ;S 为拉普拉斯算子;ωv 为伺服阀的固有频率,rad/s ;ξv 为伺服阀阻尼比,可根据伺服阀样本给出幅频特性曲线推导出;K v 为伺服阀的流量增益,m 3/(s·A )。
K v 的大小与油源压力、负载压力有关。
2.2弯辊缸和负载的平衡方程忽略库仑摩擦等非线性负载,忽略弯辊缸中油液的质量,弯辊缸每个工作腔内各处压力相同,油液温度为常数,弯辊缸内可压缩流体的连续性方程为∑Q in-∑Q out =d V d t +V βe ×d p L d t (2)式中:∑Q in 为流入弯辊缸控制腔的总流量,m 3/s ,∑Q in =Q L ;∑Q out 为流出弯辊缸控制腔的总流量,m 3/s ,∑Q out =C i p L ,C i 为液压缸的内部泄漏系数,(m 3·s -1)/Pa ;p L 为弯辊缸控制腔油液压力,Pa ;V 为所取控制腔的体积,m 3;V =Ay ,A 为活塞有效面积,m 2;y 为活塞位移,m ;βe 为液体体积弹性模数,N/m 2。
考虑活塞受力包括惯性力、粘性阻力、弹簧力,弯辊缸和负载的力平衡方程为p L A =m d 2y d t 2+B c d y d t +Ky (3)式中:m 为活塞、工作辊轴承箱、工作辊的等效质量之和,kg ;B c 为活塞的粘性阻尼系数,N/(m·s -1);K 为负载的等效刚度,N/m 。
赵荣,等:冷轧机工作辊弯辊控制系统模拟··11辽宁科技大学学报第37卷2.3管道的数学模型在轧机压上系统中,由于伺服阀与压上缸间的油路通道很短,通道中油液的数量很少,刚性很大,因此管道对系统动态性能的影响可以忽略。
但对于弯辊系统,伺服阀与弯辊缸之间的距离很大,少则几米多则十几米,管道过长带来系统不稳定和响应滞后。
管道中油液容积多于弯辊缸中油液的容积,管道在高压油的作用下发生弹性变形,系统符合非恒定流条件,管道的动态性能对弯辊系统精确性和可靠性的影响不容忽略,进行弯辊系统精确动态模拟计算时必须考虑管道本身的动态特性。
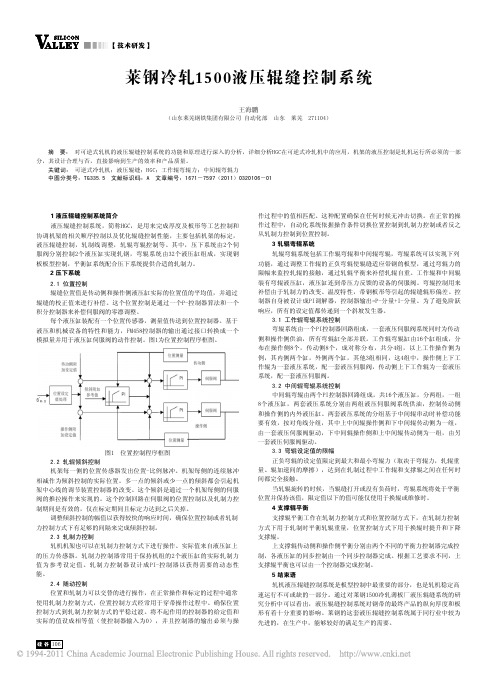
本文以非对称工作辊弯辊系统为模拟对象,实际轧机的工作辊操作侧弯辊缸管路配置情况如图2所示,操作侧所有液压缸由一个伺服阀驱动,上工作辊操作侧入口和下工作辊操作侧入口的弯辊缸由一个分支管道供油,上工作辊操作侧出口和下工作辊操作侧出口的弯辊缸由另一个分支管路供油,两个分支管路并联到主管道上。
由于分支管路与液压缸间的管路很短,其对弯辊系统动态特性的影响可以忽略不计。
图2实际管道配置Fig.2Actual hydraulic lines arrangement of work roll bending根据流体管道动特性基本方程,各段管道的动态特性方程为[5-6]éëêùûúP 1Q 1=éëêêùûúúch Γ1Z c 1sh Γ11Z c 1sh Γ1ch Γ1éëêùûúP 2Q 2(4)éëêùûúP 2λQ 2=éëêêùûúúch Γ2Z c 2sh Γ21Z c 2sh Γ2ch Γ2éëêùûúP L 1Q L 1(5)éëêùûúP 2()1-λQ 2=éëêêùûúúch Γ3Z c 3sh Γ31Z c 3sh Γ3ch Γ3éëêùûúP L 2Q L 2(6)式中:λ为流量分配系数,与液压缸内泄系数及管道的长度有关,考虑到分支管路近似对称布置,计算过程中λ的值取1/2。
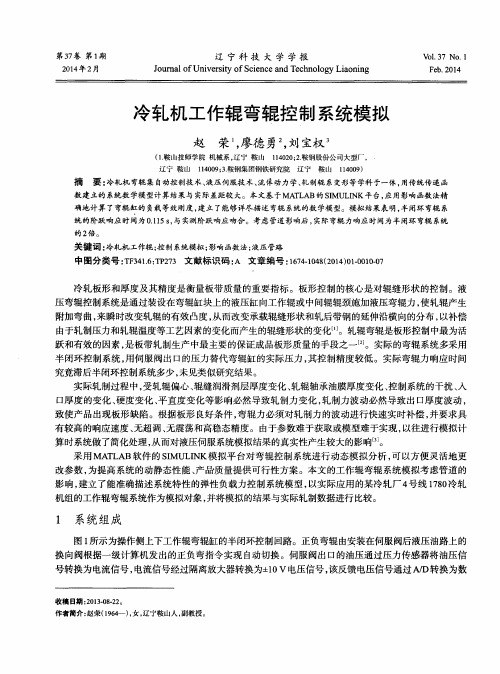
3动态特性模拟分析以某冷轧厂4号线1780机组的操作侧的弯辊系统为模拟对象,工作辊弯辊系统的实际阶跃输入和实际输出曲线如图3和图4,系统无超调,响应时间为110ms ,稳态误差小于3%。
正常轧制时的设定值和实际弯辊力数据比较见图5,实际输出压力的动态品质能够满足实际轧机条件。
··12第1期图3实际方波输入和实际响应曲线Fig.3Actual square wave and responsecurve图4半闭环弯辊系统实际阶跃响应Fig.4Actual step response of semi-closed loop bendingsystem图5生产过程中弯辊力设定值和实际值Fig.5Set value and actual value of bending force以MATLAB 软件的SIMULINK 模块为模拟平台,依据上述模型构建弯辊系统的数学模型对冷轧机弯辊系统进行模拟。
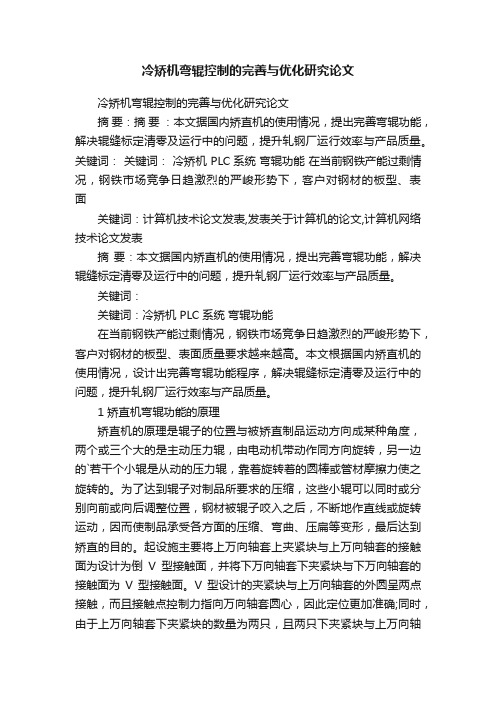
图6为未考虑管道动特性时所建弯辊系统模型的开环BODE 图,幅值裕量为39.1dB ,相角裕量为90°,系统稳定。
图7为模型的阶跃响应曲线,阶跃响应时间为0.115s ,与实际弯辊系统的阶跃响应时间相符合,实测响应与模拟响应曲线对比见图8。
赵荣,等:冷轧机工作辊弯辊控制系统模拟··13辽宁科技大学学报第37卷图6半闭环弯辊系统的BODE 图Fig.6Bode diagram of semi-closed loop bendingsystem图7半闭环弯辊系统模型的阶跃响应Fig.7Step response of semi-closed loop bendingsystem图8实际输出和模拟输出Fig.8Actual and simulated output图1所示实际弯辊系统采用半闭环控制方式,忽略了对管道动态特性对实际弯辊力的影响,弯辊力的计算由检测到的伺服阀出口压力直接乘以弯辊缸的个数和面积,通过上述计算得到的弯辊力与实际弯辊力有一定的误差。