焊接机器人变位机结构设计
(完整word版)20T焊接变位机的设计与分析要点
目录第一章绪论 (3)1.1选题背景 (3)1。
2研究的目的和意义 (3)1.3国内外研究综述 (4)第二章焊接变位机的主要性能及结构 (4)2。
1一般焊接设备应具备的性能 (5)2.2焊接变位机的分类 (5)2。
3焊接变位机的主要结构及工作原理 (7)2。
4焊接变位机的选用原则 (8)第三章焊接变位机的方案设计 (9)3。
1焊接变为机的整体方案设计 (9)3。
2 翻转机构设计 (11)3。
2。
1第一级蜗杆的设计 (11)3.2。
2第二级蜗轮的设计蜗杆 (15)第四章校核 (20)4。
1各轴转速 (20)4。
2各轴的功率 (21)4。
3 各轴的转矩 (21)4.4 齿轮的校核 (21)4。
5 轴的校核 (25)4.6小齿轮轴承的校核 (26)第五章控制部分 (28)5。
1 控制部分电气原理图 (28)5.2回转机构的控制部分 (28)5.3翻转电机的控制 (29)致谢 (30)参考文献 (31)第一章绪论1.1选题背景焊接技术自发明至今已有百余年的历史,工业生产中的一切重要产品,如航空、航天及核能工业中产品的生产制造都离不开焊接工艺,并且焊接质量的好坏直接影响产品质量的好坏以及整机性能.所以改进焊接技术,提高焊接质量对现代化工业有着重要的作用,其中提高焊接机械化、自动化水平,实现焊接工艺及装备的现代化是改进焊接质量的一个重要方面。
一般来说,当焊件的质量较大或体积较大时,靠人工改变焊缝位置很不容易,且效率低下,在这样的焊接生产中,就会遇到焊接变位及选择合适的焊接位置的情况,针对这一实际需要,人们就设计制造了焊接变位机。
合适的变位机能将被焊工件的焊缝转动到最佳位置,从而提高焊接质量及生产效率,更避免了立焊、仰焊等情况出现。
变位机可以使工件上的接缝处于理想的船形位置或平焊位置,以方便进行焊接,是提高焊接效率和质量,降低劳动强度的有效工具。
另外,选择合适的变位机能降低工人的劳动强度以及生产成本,加强安全文明生产,有利于现场管理.到如今,焊接变位机不仅仅是一种焊接辅助设备,它更是与与焊接操作机、焊接滚轮架并称为焊接辅助设备中三大机。
30T焊接变位机设计(大个)
30T双立柱焊接变位机构设计摘要随着焊接自动化的发展焊接变位机已经成为制造业的一种不可缺少的设备,在焊接领域把它划为焊接辅助机,其型式系列和品种规格约有十余个系列、百余个品种,正在形成一个新兴行业。
本题目是设计能载重30.0吨工件,可进行全位置焊接的双立柱式变位机械。
主要内容是关于焊接时工作台与工件回转倾斜的控制、电机选择、减速器的选择、各个轴和轴承的确定以及校核等等。
本课题根据预定的载荷和要求的焊接速度确定设备所需要的电动机类型,在此基础上通过皮带轮传动达到过载要求,蜗杆传动达到较大传动比以及减速箱等,最终达到所需的传动。
最后使用CAD软件绘制相关的零件图、总装图。
关键词:焊接变位机,减速器,电机类型,机械设计BLOCK-TYPE WELDING POSITIONER ROTARYMECHANISM DESIGNABSTRACTWelding positioner has become indispensable manufacturing equipment, in the welding area it designated as welding auxiliary machines. Series and products specifications on the type of case, has been available, and nearly a dozen more series, more than one hundred varieties and specifications, is forming a new industry.This subject is designed to load 1.0t parts, for all position welding of Block Variable-bit machines. Mainly on the welding machine of the rotary turning the control, motor selection, the choice of reducer, worm shaft and bearing all the determination and checking, and so on.The specific process design is based on pre-load and required welding speed to determine the equipment needed to motor types, including: motor speed, rated power, voltage and current, calculated on the basis of this axis and the corresponding parts of the model size, and its associated strength, service life can be checked. Fragment using CAD software, the relevant parts diagram, assembly drawing out.KEY WORDS: welding positioner, reducer, motor type, mechanical design目录摘要 (Ⅰ)ABSTRACT (Ⅱ)目录 (Ⅲ)前言 (1)第一章焊接变位机械性能及结构 (3)§1.1 焊接变位机械 (3)§1.2 焊接变位机械应具备的性能 (3)§1.3 焊接变位机的功能及结构形式 (4)§1.4 主自由度及全功能焊接变位机 (5)第二章焊接变位机方案设计 (6)§2.1 焊接变位机整体方案设计 (6)§2.1.1 座式焊接变位机的用途及结构形式 (6)§2.1.2焊接变位机的驱动系统 (7)§2.1.3 设计方案简介 (7)§2.2 回转机构的设计 (7)§2.2.1 回转机构传动简图 (7)§2.2.2 原始数据 (8)§2.2.3 工作条件 (8)§2.2.4 电动机的选择 (8)第三章回转机构减速器的设计 (9)§3.1 总传动比 (9)§3.2 总传动比的分配 (9)§3.3 传动装置的运动和动力参数设计 (9)§3.3.1 各轴的转速 (9)§3.3.2 各轴的功率 (9)§3.3.3 各轴的转矩 (10)§3.3.4 各数据汇总 (10)§3.4 传动零件的设计 (10)§3.4.1 同步带传动的设计 (10)§3.4.2 第一级蜗杆传动的设计 (12)§3.4.3第二级蜗杆传动的设计 (16)§3.4.4一级蜗杆轴的设计 (19)§3.4.5二级蜗杆轴的设计 (20)§3.4.6二级蜗轮轴的设计 (21)§3.4.7轴的校核 (22)§3.4.8键的选择 (24)第四章翻转机构的设计 (9)§4.1 翻转机构简图 (13)§4.2 原始数据 (14)§4.3 电动机的选择 (14)§4.4 总传动比 (9)§4.5 总传动比的分配 (9)§4.6 传动装置的运动和动力参数设计 (9)§4.6.1 各轴的转速 (9)§4.6.2 各轴的功率 (9)§4.6.3 各轴的转矩 (10)§4.6.4 各数据汇总 (10)§4.7 传动零件的设计 (10)§4.7.1 同步带传动的设计 (10)§4.7.2 第一级蜗杆传动的设计 (12)§4.7.3第二级蜗杆传动的设计 (16)§4.7.4一级蜗杆轴的设计 (19)§4.7.5二级蜗杆轴的设计 (20)§4.7.6二级蜗轮轴的设计 (21)§4.7.7连接轴的设计 (21)§4.7.8轴的校核 (22)§4.7.9键的选择 (24)结论 (25)致谢 (26)参考文献 (27)外文资料翻译 (28)前言在我国,乃至世界范围内,有关焊接变位机的基本概念、型式与分类、主要技术参数等存在不统一的问题,甚至存在某些量纲混淆问题。
机器人焊接工作站中变位机的作用分析

机器人焊接工作站中变位机的作用分析摘要:变位机作为现代机械化生产的典型设备,其已逐渐的广泛应用于工业生产的各个领域,目前来说我国汽车制造企业多数都采用机器人焊接工作站的方式进行工件生产,相比于以往的人工加工方式,工作效率和焊接质量都显著提升。
本文基于常见变位机类型及其作用进行分析,并对机器人焊接工作站中变位机技术性能进行探究。
关键词:生产效率;经济效益;伺服驱动引言:当前社会发展形势下,现代科学技术的应用使工业制造发生重大变革,以往的劳动密集型产业逐渐发生转变,越来越多的工业生产内容开始由机器人替代人工,工作效率和制造精确性都显著提升。
根据相关调查统计数据显示,我国汽车保有量位居世界前列,车型更新换代速度不断加剧,市场竞争逐渐呈现较为激烈的形式。
为更好的提升生产效率和质量,实现经济效益的增长,世界上多数汽车制造企业开始以焊接机器人替代人工,这种模式已成为未来汽车制造业发展的必然趋势。
一常见变位机类型及作用分析1.单轴翻转变位机单轴翻转变位机结构形式如图1所示,该变位机的运转动力通过一般电机或是伺服电机进行供电驱动,在实际工作过程中可以根据零部件焊接加工要求进行速度调节,其应用作用是辅助焊接机器人对加工零部件进行角度旋转,以确保焊接满足应用需求,提升焊接质量,单轴翻转变位机是现阶段机器人工作站中应用较为广泛的辅助焊接设备。
图1:单轴翻转变位机结构形式2.双轴标准变位机双轴标准变位机结构形式如图2所欧式,该变位机的两侧旋转轴通过伺服电机进行供电驱动,能够辅助机器人焊接和进行夹具翻转。
与其他种类的变位机不同,双轴标准变位机可以在正负180度之间进行水平旋转,能够有效的提升与焊接机器人的协调能力使焊接机器人的焊接方式处于最佳状态,并且焊缝的质量也得到显著的提升。
双轴标准变位机适用于小型焊接工作站,通常用于小型零部件加工。
图2:双轴标准变位机结构形式3.L型双轴变位机L型双轴变位机结构形式如图3所示,该变位机的驱动方式与双轴标准变位机的驱动方式相同,其作用也大致相同。
焊接变位机械设计研究
焊接变位机械设计研究焊接变位机械是一种可以帮助焊接过程中工件进行旋转和翻转的设备,它在焊接工艺中具有非常重要的作用。
在焊接自动化过程中,焊接变位机械能够提高焊接效率和质量,减少人力成本和操作风险。
对焊接变位机械的设计和研究具有重要的实际意义。
一、焊接变位机械的类型及其应用1. 类型焊接变位机械根据其结构和工作方式的不同,可以分为旋转式焊接变位机和翻转式焊接变位机两种类型。
旋转式焊接变位机是指通过电机驱动旋转轴,使工件进行旋转的装置。
在焊接过程中,采用旋转式焊接变位机可以使工件保持稳定的旋转速度和角度,从而实现对工件全方位的焊接。
2. 应用焊接变位机械主要用于大型工件焊接过程中的旋转和翻转操作。
在船舶、桥梁、石油化工、风电等领域,需要对大型金属构件进行焊接时,通常就需要使用焊接变位机械来实现对工件的旋转和翻转。
焊接变位机械也可以应用于钢结构、船舶、桥梁等工程机械的生产制造环节。
二、焊接变位机械设计研究现状分析目前,国内外关于焊接变位机械设计研究已经取得了一系列的成果,但与焊接自动化设备的整体发展相比,焊接变位机械的设计研究尚处于起步阶段,存在一些问题和不足。
1. 技术水平不高目前国内焊接变位机械的设计水平相对较低,主要体现在设备的控制精度、稳定性和可靠性方面。
大多数焊接变位机械还停留在传统机械传动和液压控制的阶段,缺乏现代化的电气控制技术和自动化控制系统。
2. 缺乏标准化设计国内焊接变位机械的设计缺乏统一的标准和规范,导致了产品质量参差不齐,生产效率低下,难以满足用户的实际需求。
由于缺乏标准化设计,焊接变位机械的产品结构和性能参数存在较大的差异。
3. 创新能力不足国内焊接变位机械制造企业创新能力不足,缺乏对焊接变位机械的核心技术和关键零部件的研发能力。
目前,市场上主要以进口设备为主,国内产品在技术含量和产品性能上存在明显的差距。
为了提高焊接变位机械的设计水平和产品质量,需要针对关键技术进行深入研究和探讨。
焊接变位机的设计(全套图纸)
本次设计是以焊接变位机作为主要的研究对象。
在焊接变位机中采用全液压系统,使之重量减轻,自动化程度增强,变位机中的传动部分是由一个油泵机组分别驱动油马达和三组油缸带动工作台进行回转和倾斜,并使主,副臂产生俯仰动作调节工作台的高低。
本次设计对焊接变位机的传动机构的特点和组成都做了详细的介绍,对机构中的主要零部件做了具体的设计。
本次设计采取了独特的设计,使得产品更为先进、实用,设计后制造出来的焊接变位机主要应用在焊接行业上,这样可以缩短焊接辅助时间,提高工人的劳动生产率,减轻工人劳动强度,改善焊接质量,并充分发挥各种焊接方法的效能。
在焊接生产中,经常会遇到焊接变位以及选择合适的焊接位置的情况,针对这一实际需要,我们设计的焊接变位机,它可通过工作台的回转和倾斜,使焊缝处于易焊位置。
焊接变位机与焊接操作机配合使用,可实现焊接的机械化、自动化,提高了焊接的效率和焊接质量。
焊接变位机可应用于化工、锅炉、压力容器、电机电器、铁路交通、冶金等工业部门的自动焊接系统。
关键词:焊接变位机;液压系统;回转;倾斜;The design is subject to weld change site equipment .The weld change site equipment,which the hydraulic system been used to lighten its weight and achieve highly automatically. The transmission part of the equipment is powered by one group of oil pump,several hydraulic motor and three hydrocylinder drive the work table to achieve rotation, incline and vice-arm to adjust work table height. The detailed system feature and components have been introduced in this design to emphasis the cutting edge and reality feature, which been enhanced by the specialty design of its major component. Weld change site equipment is mainly for welding industry to reduce the welds the assistance period, enhance work efficiency, reduce utility of labour and improve quality of welding. Most importantly, weld change site equipment could enhance the effect of almost every sort of welding。
台式焊接变位机设计说明书
台式焊接变位机设计说明书第一章焊接变位机械性能及结构1.1 焊接变位机械概述焊接变位机械是改变焊件、焊机或焊工位置来完成机械化、自动化焊接的各种机械装置。
焊接变位机械可分为三大类:(1)焊件变位机械:包括焊接变位机、焊接滚轮架、焊接回转台和焊接翻转机。
(2)焊机变位机械:包括焊接操作机和电渣焊立架。
(3)焊工变位机械:包括焊工升降机等。
焊接变位机(positioner)是将工件回转、倾斜,使工件上的焊缝置于有利施焊位置的焊件变位机械。
它主要用于机架、机座、法兰、封头等非长形工件的翻转变位和焊接,也可用于装配、切割、检验等。
焊接滚轮架(turning rolls)是借助主动滚轮与工件之间的摩擦力带动筒形工件旋转的焊件变位机械。
它主要用于筒形工件的装配与焊接,是锅炉容器生产中的常用工艺装备。
焊接回转台(welding turntable)是一种简化的变位机,它将工件绕垂直轴回转或者固定某一角度倾斜回转,主要用于回转体工件的焊接、堆焊与切割。
焊接翻转机(welding tilter)是将工件绕水平轴转动或倾斜,使之处于有利装焊位置的焊件变位机。
它主要适用于梁柱、框架、椭圆容器等的焊接。
焊接操作机(manipulator)的作用是将焊机机头准确地送到并保持在待焊位置,或以选定的焊接速度沿规定的轨迹移动焊机机头。
焊接操作机与变位机、滚轮架等配合使用,可完成纵缝、环缝、螺旋缝的焊接,还可以用于自动堆焊、切割、探伤、打磨、喷漆等作业。
1.2 焊接变位机械具有的性能1)焊件变位机械和焊机变位机械要有较宽的调速范围,稳定的焊接运行速度,以及良好的结构刚度。
2)对尺寸和形状各异的焊件,要有一定的适用性。
3)在传动链中,应具有一级反行程自锁传动,以免动力源突然切断时,焊件因重力作用而发生事故。
4)与焊接机器人和精密焊接作业配合使用的焊件变位机械,视焊件大小和工艺方法的不同,其到位精度(点位控制)和运行轨迹精度(轮廓控制)应控制在0.1~2mm之间,最高精度应可达0.01mm。
带有k形变位机的机器人弧焊工作站设计
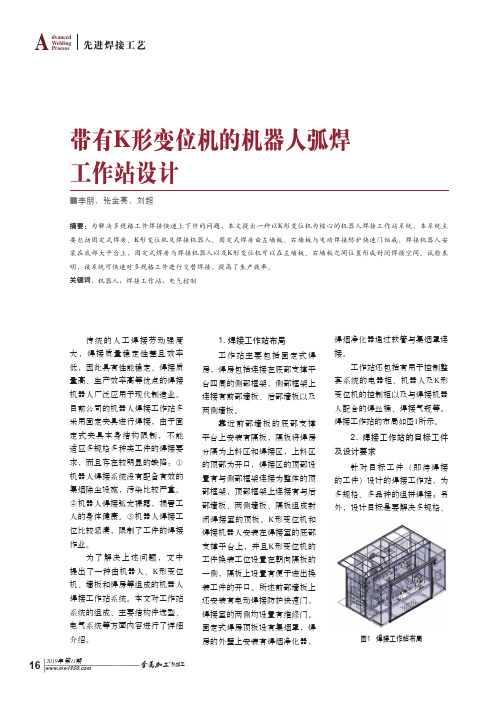
2019年第11期热加工A先进焊接工艺dvancedWeldingProcess16带有K形变位机的机器人弧焊工作站设计■李朋,张金亮,刘超摘要:为解决多规格工件焊接快速上下件的问题,本文提出一种以K形变位机为核心的机器人焊接工作站系统,本系统主要包括固定式焊房、K形变位机及焊接机器人。
固定式焊房由左墙板、右墙板与电动焊接防护快速门组成,焊接机器人安装在底部大平台上,固定式焊房与焊接机器人以及K形变位机可以在左墙板、右墙板之间位置形成封闭焊接空间。
试验表明,该系统可快速对多规格工件进行交替焊接,提高了生产效率。
关键词:机器人;焊接工作站;电气控制传统的人工焊接劳动强度大,焊接质量稳定性差且效率低,因此具有性能稳定、焊接质量高、生产效率高等优点的焊接机器人广泛应用于现代制造业。
目前公司的机器人焊接工作站多采用固定夹具进行焊接,由于固定式夹具本身结构限制,不能适应多规格多种类工件的焊接要求,而且存在较明显的缺陷:①机器人焊接系统没有配备有效的集烟除尘设施,污染比较严重。
②机器人焊接弧光裸露,损害工人的身体健康。
③机器人焊接工位比较紧凑,限制了工件的焊接作业。
为了解决上述问题,文中提出了一种由机器人、K形变位机、墙板和焊房等组成的机器人焊接工作站系统。
本文对工作站系统的组成、主要结构件选型、电气系统等方面内容进行了详细介绍。
1. 焊接工作站布局工作站主要包括固定式焊房,焊房包括连接在底部支撑平台四周的侧部框架,侧部框架上连接有前部墙板、后部墙板以及两侧墙板。
靠近前部墙板的底部支撑平台上安装有隔板,隔板将焊房分隔为上料区和焊接区,上料区的顶部为开口,焊接区的顶部设置有与侧部框架连接为整体的顶部框架,顶部框架上连接有与后部墙板、两侧墙板、隔板组成封闭焊接室的顶板。
K形变位机和焊接机器人安装在焊接室的底部支撑平台上,并且K形变位机的工件换装工位设置在朝向隔板的一侧,隔板上设置有便于进出换装工件的开口。
所述前部墙板上还安装有电动焊接防护快速门,焊接室的两侧均设置有维修门。
焊接变位器变位机

1.设计方案确定图1-11.1设计要求、技术要求表1-1设计要求、技术要求工作台回转工作台倾斜载重量回转速度倾斜速度工作台尺寸φ重心高度偏心距工作台倾斜角度电机驱动电机驱动200kg 0-1.6r/min 0-1r/min 400mm 200mm 120mm 0-135°1.2回转机构的确定由于工作台回转速度低,调速范围大,额定功率低,所以选择直流电动机;因为总传动一般大,故可选择外购一个减速器,蜗轮蜗杆机构。
1.3倾斜机构的确定工作台的倾斜是为了使工件定位,其倾斜运动一般是电动机经减速器减速后通过扇形齿轮带动工作台倾斜。
因此次设计的载重量不是很大135~0,故采用人工手柄带动,采用两级减速,蜗轮蜗杆减速及半圆齿轮机构,从而形成的调速范围。
1.4机构预期寿命估算机构预期使用寿命为5年,由于变位机上面焊件不可能总是在全自动化条件下焊接及安装和取放,即不是连续工作,则按运行时间按工作时间的50%计算。
以每天两班制,全年工作300个工作日记则其使用寿命为小时。
根据《焊接工装夹具及变位机械图册》初步设计焊接变位机简图,如图1-2图1-22.回转机构设计2.1回转轴的强度计算如下图2-1所示,X、Y、Z三轴方向设定Z为主轴方向,Y垂直主轴方向沿纸面向上,X轴垂直主轴纸面向外。
图2-1主轴受力有弯力矩和扭矩。
绕X轴M x,绕Y轴M y在焊件和夹具等综合重要作用下,回转轴的危险断面在轴承A处,A点垂直回转轴线的截面上受有弯曲力矩M w和扭矩M n.因此有βαααsin cos hesin 2e sin h 22w ++=G M 其中G —综合重量e —综合重心偏心距 h —综合重心高β错误!未找到引用源。
—回转轴的转角α—回转轴的倾斜角A 截面受的扭矩为按第三强度理论折算当量弯矩计算分析后得到当满足与βα当量弯矩有最大值,为2222max 2009.8200120457.15xd M G h e MPa =+=⨯+=根据max xd M 初步确定回转轴的直径:主轴材料选择材料为45#钢调质状态,其弯曲疲劳强度极限-1275a MP σ=许用应力:1[]Knεσσ-=错误!未找到引用源。
焊接变位机的设计(全套图纸)
本次设计是以焊接变位机作为主要的研究对象。
在焊接变位机中采用全液压系统,使之重量减轻,自动化程度增强,变位机中的传动部分是由一个油泵机组分别驱动油马达和三组油缸带动工作台进行回转和倾斜,并使主,副臂产生俯仰动作调节工作台的高低。
本次设计对焊接变位机的传动机构的特点和组成都做了详细的介绍,对机构中的主要零部件做了具体的设计。
本次设计采取了独特的设计,使得产品更为先进、实用,设计后制造出来的焊接变位机主要应用在焊接行业上,这样可以缩短焊接辅助时间,提高工人的劳动生产率,减轻工人劳动强度,改善焊接质量,并充分发挥各种焊接方法的效能。
在焊接生产中,经常会遇到焊接变位以及选择合适的焊接位置的情况,针对这一实际需要,我们设计的焊接变位机,它可通过工作台的回转和倾斜,使焊缝处于易焊位置。
焊接变位机与焊接操作机配合使用,可实现焊接的机械化、自动化,提高了焊接的效率和焊接质量。
焊接变位机可应用于化工、锅炉、压力容器、电机电器、铁路交通、冶金等工业部门的自动焊接系统。
关键词:焊接变位机;液压系统;回转;倾斜;The design is subject to weld change site equipment .The weld change site equipment,which the hydraulic system been used to lighten its weight and achieve highly automatically. The transmission part of the equipment is powered by one group of oil pump,several hydraulic motor and three hydrocylinder drive the work table to achieve rotation, incline and vice-arm to adjust work table height. The detailed system feature and components have been introduced in this design to emphasis the cutting edge and reality feature, which been enhanced by the specialty design of its major component. Weld change site equipment is mainly for welding industry to reduce the welds the assistance period, enhance work efficiency, reduce utility of labour and improve quality of welding. Most importantly, weld change site equipment could enhance the effect of almost every sort of welding。
启玄科技小牛焊接机器人增加变位机方案
启玄科技小牛焊接机器人增加变位机方案小牛焊接机器人是一种自动化焊接设备,能够提高焊接质量和效率。
为了满足焊接不同位置和角度的需求,可以通过增加变位机来改变焊接机器人的位置和姿态。
下面是一些关于小牛焊接机器人增加变位机方案的参考内容:1. 变位机的选择:变位机是将焊接机器人的焊接枪在三维空间中进行移动和旋转,以适应不同的焊接需求。
选取合适的变位机至关重要。
可以考虑以下因素:- 加载能力:根据工件的大小和重量,选择能够承载焊接机器人的变位机。
- 自由度:根据工件的复杂度和焊接需求,选择具有足够自由度的变位机。
- 稳定性:确保焊接机器人在移动和旋转时保持稳定,以确保焊接质量。
- 控制方式:选择方便和易于使用的变位机控制系统,以方便操作员控制。
2. 变位机的安装:确定焊接机器人与变位机的安装方式,保证机器人能够准确地移动和旋转。
安装时需注意以下事项:- 确保焊接机器人与变位机的匹配性,避免安装时出现不稳定或不兼容的情况。
- 根据焊接机器人和变位机的设计,确定安装的角度和位置,以确保焊接能够覆盖到目标区域。
- 考虑安装的稳固性和可靠性,避免机器人和变位机在工作过程中出现晃动或脱离的情况。
3. 可编程控制系统:为了实现焊接机器人和变位机的协同工作,需要一个可编程控制系统来控制两者的运动和姿态。
可以选择以下控制系统:- PLC(可编程逻辑控制器):使用PLC编程软件来编写焊接机器人和变位机的运动控制程序,实现两者的协同工作。
- 控制器:选择适当的控制器来管理焊接机器人和变位机的运动和姿态,确保它们按照预定的路径和方式进行焊接。
4. 安全装置:焊接机器人和变位机的增加需要考虑到安全问题,以防止事故和伤害。
可以考虑以下安全装置:- 紧急停止按钮:在紧急情况下,按下停止按钮可以立即停止焊接机器人和变位机的运动。
- 安全防护栅:围绕焊接机器人和变位机设置安全防护栅,防止人员误碰或靠近机器。
- 光栅安全传感器:安装光栅安全传感器来监测人员的接近,一旦有人接近,机器将自动停止运动。
毕业论文:专用焊接机器人的结构设计

1绪论1.1焊接机器人的发展自从世界上第一台工业机器人UMMATE于1959年在美国诞生以来,机器人的应用和技术发展经历了三个阶段:第一代是示教再现型机器人。
这类机器人操作简单,不具备外界信息的反馈能力,难以适应工作环境的变化,在现代化工业生产中的应用受到很大的限制。
第二代是具有感知能力的机器人。
这类机器人对外界环境有一定的感知能力,具备如听觉、视觉、触觉等功能,工作时借助传感器获得的信息,灵活调整工作状态,保证在适应环境的情况下完成工作。
第三代是智能机器人。
这类机器人不但具有感觉能力,而且具有独立判断、行动、记忆、推断和决策的能力,能适应外部对象、环境协调工作,能完成更加复杂的动作,还具备故障自我诊断及修复能力。
焊接机器人就是焊接生产领域代替焊工从事焊接任务的工业机器人。
焊接机器人的出现,帮助人们解决了很多问题。
焊接机器人具有如下特点:(1)稳定和提高焊接质量,保证其一致性。
采用机器人焊接时,对于每条焊缝的焊接参数都是恒定的,焊缝质量受人的因素影响较小,因此焊接质量是稳定的。
而人工焊接时,焊接速度、干伸长等会受人为因素的影响而发生变化,因此很难做到质量的一致性;(2)提高劳动生产率。
机器人可24小时连续生产,另外随着高速高效焊接技术的应用,人工焊接已经无法适应,必须使用机器人焊接;(3)改善了工人的劳动条件。
采用机器人焊接工人只是参与管理和控制焊接过程,远离了焊接弧光、烟雾和飞溅等;(4)产品周期明确,容易控制产品质量。
机器人的生产节拍是固定的,因此安排生产计划非常明确;(5)焊接机器人的制造技术不断提高(高速度、高精度、高可靠性、便于操作和维修),单机价格不断下降。
随着工业跌的发展和各种技术的不断革新以及对生产结构和产品质量的要求不断提高,焊接机器人在各种行业中发挥越来越重要的作用。
目前,世界各国都在加大科研力度,对焊接机器人进行研究,从发展趋势上看,焊接机器人和其他工业机器人一样,不断向智能化和多样化方向发展。
焊接变位机械设计研究

焊接变位机械设计研究
焊接变位机械是一种用于焊接工作的设备。
它可以帮助焊接工人在焊接过程中改变焊接角度和位置,从而使焊接工作更加高效和方便。
这种机械是一种高精度的设备,它需要很复杂的设计和制造。
1、机械结构的设计:由于焊接变位机械需要承受高强度的负载,因此机械结构的设计必须充分考虑稳定性和强度等因素。
一般应选用强度较高的材料,如钢材或铝合金等,确保机械结构的稳固和可靠。
2、机械控制系统的设计:焊接变位机械的控制系统需要具备快速响应、高精度、稳定性和灵活性等特点。
焊接变位机械的控制系统通常包括PLC控制器、电控系统、液压系统和气动系统等组成部分。
3、机械运动的控制和监控:在机器人控制以及再生能源等领域,控制和监测系统起到了非常重要的作用,它可以实现控制、处理、分析并输出良好的数据,优化操作,提高安全性和生产率。
因此,在焊接变位机械的设计中,为了保证机器的准确性和可操作性,需要安装合适的控制和监测系统。
在实际的应用中,焊接变位机械的设计因不同的使用环境而不同。
焊接变位机械只有在经过严格的测试和试验之后才能达到理想的设计要求。
在实际生产中,需要严格遵守公共安全规定,并定期对机器进行保养和升级,以保证机器的可用性和操作性。
总之,焊接变位机械的设计是一个非常重要的工作,需要在强度、稳定性和可靠性等方面进行合理优化。
在实际生产中,需要加强机械的运作监控和维护,定期进行升级和测试,以确保其长期稳定运行。
启玄科技小牛焊接机器人增加变位机方案

启玄科技小牛焊接机器人增加变位机方案随着自动化技术的发展,焊接机器人已经逐渐成为现代制造业中重要的组成部分。
智能焊接机器人除了可以提高生产效率和生产质量,还可以减少劳动强度,提高工作环境的安全性。
而焊接机器人的变位机方案更是让它的适用范围得到了进一步的扩展。
首先,什么是焊接机器人的变位机方案?焊接机器人的变位机方案是指在现有焊接机器人的基础上,加入自动变位机构,使焊接机器人具有更多的灵活性和适应性。
即使在不改变机器人原有程序的情况下,焊接机器人也能自动完成不同的工件焊接工艺。
那么,为什么要对小牛焊接机器人增加变位机方案呢?首先,小牛焊接机器人是一种具有高可靠性、高精度和高效率的机器人。
但是,在焊接不同类型的工件时,小牛焊接机器人需要进行重新编程和调整,这会浪费大量时间和资源。
而通过增加变位机方案,小牛焊接机器人就能够自动调整工作位置和焊接路径,实现快速转动和改变位置,节约了大量的工作时间和经费。
其次,焊接机器人的变位机方案增加了其灵活性和适应性,可以适用于更多不同类型的焊接任务。
在不改变原有焊接程序的情况下,焊接机器人能够快速适应新的工件结构和不同的焊接工艺,提高了生产的灵活性和自适应能力。
另外,焊接机器人的变位机方案还可以提高生产线的整体效益。
通过运用先进的自动变位机构,焊接机器人可以实现自动化改变工位,快速切换任务,达到快速换线的效果。
这就能够减少生产线停机时间,提高生产效率,降低企业的生产成本,增加利润空间。
那么,该如何实现小牛焊接机器人的变位机方案?小牛焊接机器人的变位机方案主要是通过增加自动变位机构来实现的。
自动变位机构包括变位机和变位台两部分,变位机安装在小牛焊接机器人上,变位台则安装在生产线上。
当焊接工件需要改变位置时,变位台会自动切换焊接工作台的位置,使焊接机器人能够顺利完成下一道焊接工序。
这样,焊接机器人就能够在不改变原有焊接程序的情况下完成不同工件的焊接任务,提高生产线的整体效益。
启玄科技小牛焊接机器人增加变位机方案(一)
启玄科技小牛焊接机器人增加变位机方案(一)启玄科技小牛焊接机器人增加变位机背景启玄科技的小牛焊接机器人因其高效、准确、稳定的性能,深受市场欢迎。
然而,在实际应用过程中,发现机器人无法进行多角度的焊接,导致生产效率下降。
为了解决这个问题,我们提出了增加变位机的方案。
方案详述1. 硬件设备将变位机器组装在小牛焊接机器人上并进行连接。
变位机主要有旋转、翻转和倾斜三种工作方式,可以满足不同焊接角度的需求。
同时,我们还需要增加一个机器人末端执行器,以便更好地实现焊接任务。
2. 软件系统为了使机器人能够顺利地与变位机进行配合,我们需要进行系统优化。
具体来说,我们需要进行如下操作:•进行系统间通信协议的设计•为机器人增加变位机控制模块•建立机器人和变位机的数据共享机制•设计操作界面,方便工人操作3. 操作流程操作流程主要分为三步:1.工人在机器人控制界面上输入焊接任务的要求。
2.机器人接收任务要求后,结合变位机工作方式,自动调整工作姿态。
3.机器人开始进行焊接任务。
通过增加变位机的方案,我们期望达到以下效果:1.实现小牛焊接机器人的多角度焊接,提高焊接效率。
2.减轻工人的工作强度,提高生产线的安全性。
3.将小牛焊接机器人推向智能化、自动化的发展方向,为企业带来更高的生产效益。
结论增加变位机是一项高价值、高投入的工程。
但在提高生产效率和机器人智能化方面有着显著的优势。
我们期望通过这个项目,为企业带来更多价值和利益。
实施计划为了实现小牛焊接机器人增加变位机的方案,我们制定了以下实施计划:阶段一:技术调研和方案设计时间:1个月任务:1.小牛焊接机器人的多角度焊接功能调研和方案设计;2.变位机的选择和组装方式设计;3.机器人和变位机系统软件设计。
阶段二:硬件设备组装和软件开发时间:2个月任务:1.小牛焊接机器人和变位机的组装;2.机器人末端执行器的设计与制造;3.机器人控制软件的开发和调试。
阶段三:实验室测试和现场试验时间:1个月1.对机器人和变位机系统进行实验室测试;2.进行现场试验,测试机器人和变位机在生产线上的表现。
机器人焊接系统中变位机的设计

控制柜协调控制,要求运动精确、快速,同时具备工件支撑 和定位功能,为焊接机器人提供初始定位点。变位机配有可 升降滚轮架,对不同直径的工件可上升不同的高度且精确定 位 (使回转中心高 度 不 变 ) ,升降与定位采用气动方式。变位 机为双座单回转形式,回转要求无级变速,可在预定位置停 止。变位机配有专用夹具,夹紧动作采用气动方式。变位机 的尾箱可以移动以适应不同长度的工件。尾箱上带有锁紧装 置,可在任意位置将尾箱固定。 风缸变位机组成与特点 实际设计的风缸变位机如图 " 所示。
$$ ・焊接设备与材料・
文章编号: (##"&#"’)*34;
焊接技术
第 !! 卷第 ! 期 "##$ 年 % 月
机器人焊接系统中变位机的设计
许文清
(天津鼎盛工程机械有限公司,天津 !##(!( )
摘要:通过机车风缸机器人焊接系统中变位机的设计实例,介绍了机器人焊接系统中变位机的设计思想及结构特点,还介绍了弧 焊 机 器人的特点和焊接功能。 关键词:机车风缸;机器人;变位机;弧焊;设计 中图分类号: 23$!4/4 文献标识码: 5
4/6:@/;3:>4;
" "/(
机器人焊接系统对风缸变位机的要求 工件的装夹及焊接工艺流程 将 工 件 吊 放 到 滚 轮 架 上!滚 轮 架 升 起 至 限 位 处!移 动 尾
!/"
升降滚轮架 升降滚轮架用于装卸工件时支撑工件,同时用于工件的
箱 靠 近 工 件 并 锁 紧!尾 箱 上 的 夹 具 伸 出 顶 紧 工 件 !滚 轮 架 下 降 复 位!变 位 机 回 转 使 工 件 纵 缝 坡 口 与 定 位 指 针 对 正 !焊 接 纵 缝!变 位 机 回 转 焊 接 环 缝 !滚 轮 架 升 起 承 接 工 件 !尾 箱 上 的夹具缩回松开工件 ! 滚轮架下降复位 ! 卸下工件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计说明书设计题目:焊接机器人变位机结构设计学生姓名:专业班级:学院:指导教师:教授目录摘要 (1)Abstract (2)1 绪论1.1选题意义 (3)1.2国内外研究现状 (4)1.3焊接变位机国内外发展状况 (4)2 弧焊机器人和变位机协调运动的研究2.1 弧焊机器人和变位机的耦合与解耦 (6)2.2 机器人和变位机协调运动模型的建立 (7)2.3 应用举例 (8)3 变位机的设计3.1焊接变位机的选型3.1.1 使用工程机械结构件焊接变位机的意义………………………123.1.2结构件焊接变位机的选型………………………………………123.1.3几种常用变位机结构……………………………………………133.2变位机总体设计3.2.1焊接机器人中的变位机 (16)3.2.2焊接变位机应具备的性能 (17)3.2.3变位机设计要求 (17)3.2.4 变位机驱动系统 (18)3.2.5 导电、导气装置 (19)3.2.6 抗齿隙装置和变位机的变位精度 (19)3.2.7 变位机的生产状况及标准化、系列化 (20)3.3 变位机的设计计算3.3.1回转轴的强度计算 (21)3.3.2回转轴驱动功率的计算 (25)3.3.3倾斜机构的计算 (25)3.3.4 许用载重量的确定 (27)3.3.5齿轮、轴、轴承、键的设计计算 (28)4 无级变速带传动设计4.1 宽V带无级变速机构结构和基本原理 (35)4.2 V型无级变速带的技术要求 (36)4.3 宽V带无级变速传动的设计要点 (38)4.4 V型宽带无级变速驱动装置的设计 (42)4.5 应用和开发带式无级变速器的几点建议 (43)结论 (45)致谢 (46)参考文献 (47)摘要随着先进制造技术的发展,实现焊接产品制造的自动化与智能化已成为必然趋势。
焊接机器人与外部变位机的配合使用才能更好的完成焊接作业。
旋转—倾斜变位机比较适合焊接那些需要变位的较小型工件,应用广泛。
同时,可以根据不同的的焊接要求设计合适的变位机械。
本文介绍了设计焊接机器人变位机的系统设计以及结构设计,并做了弧焊机器人和变位机协调运动的研究,以使弧焊机器人和外部轴变位机在误差允许的范围内进行精确的焊接。
本文还就目前国内新型变位机的设计计算做了详细解说,倾斜机构的计算及许用载重量的确定是当前学术界的新课题。
最后对变位机中所用无级变速器做了创新设计,并达到了良好效果。
最终完成了配合焊接机器人使用的旋转—倾斜变位机的设计。
该变位机机采用简单的机械传动实现旋转-倾斜功能,是经济型产品,值得推广。
关键词:变位机;机器人焊接;旋转—倾斜;无级变速AbstractWith advanced manufacturing technology development and manufacture of welding products and intelligent automation has become an inevitable trend. Welding robots with external change the crew can be better used in conjunction with the completion of welding operations. Rotation-tilt positioner more suitable for those in need of welding deformation of the workpiece smaller and wider use. Meanwhile, according to the different requirements of the welding design appropriate mechanical deformation. This paper describes the design welding robot positioner system design and structural design, and has done a welding robot and crew coordination of the campaign, so that arc-welding robot and external axis positioner in error allowed within the scope of precision welding. The paper also on the current domestic new positioner the design done a detailed explanation, tilt and the calculation of allowable load current to determine the academic topics. Finally, the positioner, which are in a CVT innovative design and achieve good results. Completed a welding robot with the use of the rotation - tilt positioner design. The positioner machine using simple mechanical transmission achieve rotation - tilt function of economic products worthy of promotion.Key words : variable machine; Robot welding; Rotation-tilt; CVT全套设计联系小企鹅:2297806921 绪论1.1选题意义及相关的焊接传感控制器件,在中央计算机的综合控制之下实现对复杂工件焊接路径的离线编程与图形仿真、空间焊缝的实时精确跟踪及焊缝参数的在线调整。
要实现上述目标,焊接机器人柔性加工单元(WFMC)的控制系统必须具有合理的体系结构、较强的数据运算和处理能力、良好的信息融合控制功能,以及开放的软硬件接口。
近几年,国外已出现了以弧焊机器人为中心的柔性加工单元,又称作焊接机器人工作站。
(一般包括一台或几台焊接机器人,一台或几台焊接变位随着先进制造技术的发展,实现焊接产品制造的自动化与智能化已成为必然趋势[1-8]。
目前,采用机器人焊接已成为焊接自动化技术现代化的主要标志。
焊接机器人由于具有通用性强、工作可靠的优点,受到人们越来越多的重视。
在焊接生产中采用机器人技术,可以提高生产率、改善劳动条件、稳定和保证焊接质量、实现小批量产品的焊接自动化。
目前,我国研制的焊接机器人尚未产业化,焊接柔性加工单元技术尚处于探索阶段,国内生产、应用主要全套引进。
弧焊机器人在国外已经批量化,价格相对较低,而与机器人相配套的数控变位设备却因加工对象而异,多属单件生产,因此价格往往是机器人本身价格的3-7倍。
我国引进的弧焊机器人柔性加工单元中的数控变位机,也是针对特定产品研制的,因此价格较昂贵,而技术培训及售后服务却不理想。
.在技术方面,我国许多工厂引进的弧焊机器人己具有机器人与变位机协调运动的功能。
这对一些空间曲线或较复杂的焊缝可以始终保持在最佳位置下进行焊接,以提高焊接质量,并能一次起弧就焊完整条焊缝,以提高效率。
但是这些带协调运动控制的弧焊机器人系统都是由国外机器人生产厂事先调好交给我们使用的,我们并不掌握有关技术。
针对以上现状,本课题所属项目的实施方案是进口价格较低的弧焊机器人,再根据特定产品,自行研制焊接变位机等机器人的外围设备及控制系统。
这不仅可以节约大篮外汇,大大提高生产率,而且有望在机器人与变位机协调控制技术方面有一定的进展与突破。
另外,随着焊接机器人的快速发展,焊接变位机也已悄然成为制造业的一种不可缺少的设备,在焊接领域把他划为焊接辅机。
近十年来,这一产品在我国工程机械行业,有了较大的发展,获得了广泛的应用。
焊接机器人的发展逐渐带动产生了各种各样的焊接变位机,并通过微机的智能控制,形成机器人焊接中不可或缺的一个重要组成部分。
1.2国内外研究现状随着工业自动化进程的发展及对焊接产品多品种小批量生产的要求,对焊接生产过程进行机器人柔性加工技术的应用己成为焊接自动化发展的必然趋势。
焊接生产系统柔性化的发展方向是以弧焊机器人为主体,配合多自由度变位机机)。
实际上,它是在多台焊接机器人与变位机械组合应用的基础上,增加了工位间的输送及上下料设备,组成了由计算机统一控制的焊接生产系统。
其特点是:产品的结构形式发生变化时,只需要改变控制程序,其硬件和执行系统并不作很多改变。
因此,整个焊接生产系统不仅自动化水平高,而且加工灵活性大.目前,国外先进国家设计制造的弧焊机器人大都与多轴数控变位机的便用相协调。
这些数控变位机都是全伺服控制,或者通过它们自身的精密控制器,或者和机器人一起,利用机器人的控制器进行控制。
这些变位机最大的优点就是数字控制,自由编程设定工作区内所有施焊位置,同步操纵被焊工件,以与机器人上的焊枪相协调。
这使得工件位置绝对可控,减少了施焊时间,并改善了工人劳动条件。
焊接变位机按自由度数可分为单轴、两轴、三轴变位机。
单轴焊接数控变位机械只有一根回转轴,使工件回转。
例如日本株式会社生产的OT-10型单轴焊接变机;目前应用最广泛的是两轴变位机械,此两轴是指使工作台回转的回转主轴和使工作台俯仰的倾斜轴;而三轴变位机通常都是多加一根升降轴,也有的是加一条可水平移动的导轨。
焊接变位机根据结构型式可分为伸臂式、单座式和双座式焊接变位机,其承载能力依次上升。
两轴单座式如日本松本株式会社PRK,PRC 型,它采用旋转编码器测位,工作台转速可调,能够测出与机器人联动的位置,并根据机器人和控制装置发来的指令进行一些特定位置的定位。
松本株式会社生产的两轴双座式变位机,也可与弧焊机器人配合使用。
三轴数控变位机如欧洲最大的焊接变位机械制造公司BODE生产的可升降双座式数控焊接变位机,这种变位机可与机器人接口,可升降、回转、翻转。
所有轴的驱动都采用晶体管PWM(脉宽调制)逆变器,可无级调速,可手动或自动操作。
此外,某些公司如松本株式会社也生产了PRE型三轴单座升降式焊接变位机,该变位机是在两轴变位机的基础上增加了升降功能,当进行大型工件作业时,保证在机器人的工作范围内使工件获得缓佳的焊接位置。
1.3焊接变位机国内外发展现状一般说来,生产焊接操作机、滚轮架、焊接系统及其他焊接设备的厂家,大都生产焊接变位机;生产焊接机器人的厂家,大都生产机器人配套的焊接变位机。