数字信号处理_第四章
数字信号处理第四章 模拟滤波器频率变换、冲激响应不变法、双线性变换法

4.4 冲激响应不变法
一、基本原理
=
x(t)
y(t)
取样
取样
x(n) = x(nT)
?
y(n) = y(nT)
?
=
响应不变
4.4 冲激响应不变法
一、基本原理
其中
取样
其中
另,根据数字系统响应
冲激响应不变原则!
4.4 冲激响应不变法
一、基本原理
模拟滤波器:
(M<N)
部分分式分解
冲激响应不变准则:
数字滤波器:
因此,双线性变换不改变系统稳定性
4.4 双线性变换法
4、频率预畸变
0
高频进行压缩
无混叠,有畸变
频率越高,畸变越大
预畸变
预畸变公式:
根据数字滤波器设计指标,求对应模拟滤波器设计指标时,需预先进行畸变
4.4 双线性变换法
5、双线性变换法设计滤波器步骤
(1)确定数字滤波器技术指标
(Hz表示)
(弧度表示)或
1)带通:计算几何中心
0
若
,则
代替
若
,则
代替
若
,则令
4.2.4 模拟滤波器的频率变换
带通带阻滤波器衰减参数选择
几何对称:
若实际给出的指标不满足几何对称,如何应对?
2)带阻:计算几何中心
0
若
,则
代替
若
,则
代替
若
,则令
固定靠近
的两个值
以让过渡带更窄为选择标准(靠近中心,指标更严)
模拟转数字滤波器
已知一个模拟滤波器H(s),如何得到数字滤波器H(z)?
3)设计归一化低通滤波器,得到传输函数
数字信号处理DSP第4章
k 0,1, , N 1
2
13
4.2 按时间抽取(DIT)的基2–FFT算法
将系数统一为 WNk 2 WN2k ,则可得
x[0]
N 4点
x[4]
DFT
G[0]
X [0]
G[1]
X [1]
x[2]
N 4点
WN0
x[6]
DFT
WN2
G[2]
1 G[3]
1
X [2] X [3]
x[1]
N 4点
X m1[i] WNr X m1[ j] , X m1[i] WNr X m1[ j]
m 1, 2 ,
每一个蝶形需要一次复数乘法和两次复数加法。
17
4.2 按时间抽取(DIT)的基2–FFT算法
N点的DIT-FFT计算量为
复数乘法:
1
N 2
log2
N
N 2
复数加法:
2
N 2
log2
N
N
例: 如果每次复数乘法需要100us,每次复数加法需要20us,来 计算N=1024点DFT,则需要
12
4.2 按时间抽取(DIT)的基2–FFT算法
同理
( N 4)1
( N 4)1
G[k] DFT[g[r]]
g[2l]WN2lk2
g[2l 1]WN(22l1)k
l 0
l 0
( N 4)1
( N 4)1
g[2l]WNlk 4 WNk 2
g[2l 1]WNlk 4 ,
l 0
l 0
k 0,1,
(3) WN0 WN4 WN8 WN12 WN16 WN20 WN24 WN28
或 WN4i i 0,1, 2, 3, 4, 5, 6, 7 (dm 1)
数字信号处理 第4章 FFT基本思想和2种基本的FFT
= −W
W的对称性
W的可约性
2 rk WN rk = WN / 2
长序列变成短序列 若N → 2个N / 2
2 则N 2次复述乘法 →(N / 2)= N 2 / 2次复数乘法 2
从信号的特殊性上考虑
– 如奇、偶、虚、实性
W 0 X (0) X (1) W 0 = X (2) W 0 0 X (3) W
对 N = 2M , 共可分 M 次,即 m = 0,1,L , M − 1,
8点FFT时间抽取算法信号流图
每一级有 N/2 个如下的“蝶形”单元:
xm ( p )
xm +1 ( p )
W
r N
xm (q)
−1
xm +1 (q )
算法讨论( “级”的概念、碟形单元、 “组” 的概念、旋转因子的分布、码位倒置)
r =2l ,r =2l +1
A(k ), B(k )
C(k) = D(k) =
N / 4−1 l =0
∑x(4l)W
l =0
lk N/4
, k = 0,1,..., N / 4 −1
N / 4−1
lk x(4l + 2)WN / 4 , k = 0,1,..., N / 4 −1 ∑
k A(k) = C(k) +WN / 2 D(k), k = 0,1,..., N / 4 −1 k A(k + N / 4) = C(k) −WN / 2 D(k), k = 0,1,..., N / 4 −1
x(6)
n N
N n = 0,1,L , 2
由此得到基本 运算单元
g (0) g (1) g (2) g (3)
数字信号处理

所以
X (k ) [Rex(n) j Imx(n)]
nk nk [Re WN j Im WN )] N 1 n 0
{Rex(n)ReW Imx(n)ImW j (Rex(n)ImW Imx(n)ReW )}, k 0,1,2,..., N 1
…
N r 0,1,..., 1 4
X 2 k f 3 ( X 5 (k ), X 6 (k ))
蝶形运算
数字信号处理-第四章 快速傅立叶变换
x1 (0)
. .
x1 ( N 1)
.
N/2点 DFT
N x1 n x1 2r x1 2r 1, r 0,1,2,..., 1 4 X 1 (k ) x1 2r x3 r , x1 2r 1 x4 (r )
.
数字信号处理-第四章 快速傅立叶变换
x(n) X (k ),
令
x1 (n) X 1 (k ), x2 (n) X 2 (k ),
n, k 0,1,2,..., N 1 N n, k 0,1,2,..., 1 2 N n, k 0,1,2,..., 1 2
N 1 n 0 nk N
x2 0 x5 (0)
N/4点 N x5 ( N 1) . DFT x2 2 4 2
.
.
X 5 (k )
x2 1 x6 (0)
蝶形 运算
X 6 (k )
X 2 (k )
N/4点 . N N x2 1 x6 ( 1) . DFT 4 2
数字信号处理-第四章 快速傅立叶变换
4.2 直接计算DFT的问题及改进的途径
程佩青_数字信号处理_经典版(第四版)_第4章_4.3按频率抽选(DIF)的基-2算法
x(7) -1
WN3
X(7)
x(0)
2点
X(0)
x(1)
DFT
X(4)
x(2)
WN0
-1
2点
X(2)
x(3)
WN2 DFT
-1
X(6)
x(4) -1
WN0
x(5) -1
WN1
2点
X(1)
DFT
X(5)
x(6) -1 x(7) -1
WN2 WN3
WN0
-1
2点
X(3)
WN2 DFT
-1
X(7)
x(0) x(1) x(2) x(3) x(4) -1 x(5) -1 x(6) -1 x(7) -1
例:已知x(n)={1,2,3,4}利用频域抽样流图,计算
X (k) DFT{x(k)}; DFT{X (k)}
1 x[0] 2 x[1] 3 x[2] 4 x[3]
4
6
1 W40 1
1
2
W41 j
1
2j 1
X[0] 10 X[2] 2 X[1] 2+2j X[3] 22j
DFT{x[k]}= {10, 2+2j, 2, 22j}
x(n)
x(n
N
/
2)
WNn
W nr N /2
注意括号
(4.3.3)
n0
k = 2r+1
频率抽取FFT
W n(2r1) N
WNnWN2nr
WNnWNnr2
存储单元
输入序列x(n) : N个存储单元
系数WNr:N / 2个存储单元
频率抽取FFT
N / 21
X (2r) [x(k) x(n N / 2)]WNnr/2 n0
数字信号处理-原理、实现及应用(第4版) 第四章 模拟信号的数字处理

结论:
正弦信号采样(2)
三点结论: (1)对正弦信号,若 Fs 2 f0 时,不能保证从采样信号恢
复原正弦信号; (2)正弦信号在恢复时有三个未知参数,分别是振幅A、
频率f和初相位,所以,只要保证在一个周期内均匀采样 三点,即可由采样信号准确恢复原正弦信号。所以,只要 采样频率 Fs 3 f0 ,就不会丢失信息。 (3)对采样后的正弦序列做截断处理时,截断长度必须 是此正弦序列周期的整数倍,才不会产生频谱泄漏。(见 第四章4.5.3节进行详细分析)。
D/A
D/A为理想恢复,相当于理想的低通滤波器,ya (t) 的傅里叶变换为:
Ya ( j) Y (e jT )G( j) H (e jT ) X (e jT )G( j)
保真系统中的应用。
在 |Ω|>π/T ,引入了原模拟信号没有的高频分量,时域上表现
为台阶。
ideal filter
•
-fs
-fs/2 o
• fs/2 fs
f •
2fs
•
•
-fs
-fs/2 o
fs/2
•
fs
•
f
2fs
措施
D/A之前,增加数字滤波器,幅度特性为 Sa(x) 的倒数。
在零阶保持器后,增加一个低通滤波器,滤除高频分量, 对信号进行平滑,也称平滑滤波器。
c
如何恢复原信号的频谱?
P (j)
加低通滤波器,传输函数为
G(
j)
T
0
s 2 s 2
s
0
s
X a ( j)
s 2
s c c
s
理想采样的恢复
《数字信号处理》第四章 相关分析
对函数两边同时作傅立叶变换有:
F
r12( )
r12 (
)e j2f
d
x1
(t
)
x2
(t
)dtej2f d
x1
(t
)
x2
(t
)ej2f d dt
第二节 相关函数的性质
这是由于:
① r(τ)完全由它的能量谱或功率谱P(f )来决定; ② P(f ) =∣X(f )∣2
具有相同的振幅谱而不同相位谱的信号,可以 有相同的自相关函数。
第一节 相关
相关函数r(τ)存在的条件是:
信号x1(t)和x2(t)是绝对可积函数。
即:
x12
(t)dt
,
或
x(t)dt
x 2 2
(t)dt
与自相关函数相对应,如果参与相关的两个信号是
不同的信号,则其相关函数称为互相关函数。
第一节 相关
t
min
xe2 (t)
x
2
(t
)dt
1
x(t
)
y(t
)dt
2
x
2
(t
)dt
y2 (t)dt
若令
xy
x(t) y(t)dt
x2 (t)dt y2 (t)dt
则相对误差可表示为
min
1
(t
)dt
精品课件-数字信号处理(第四版)(高西全)-第4章
点DFT和(4.2.10)式或(4.2.11)式所示的N/4个蝶形运算,
如图4.2.3所示。依次类推,经过M次分解,最后将N点DFT
分解成N个1点DFT和M级蝶形运算,而1点DFT就是时域序列
本身。一个完整的8点DIT-FFT运算流图如图4.2.4所示。
图中用到关系式
。W图N中k / m输入W序Nmk列不是顺序排
In Time FFT,简称DIT-FFT ); 频域抽取法FFT (Decimation In Frequency FFT,简称DIF-FFT)。本节介 绍DIT-FFT
设序列x(n)的长度为N,且满足N=2M,M为自然数。按n 的奇偶把x(n)分解为两个N/2点的子序列
x1(r) x(2r), x2 (r) x(2r 1),
x1
(2l
1)WNk
( /
2l 2
1)
l 0
l 0
N / 41
N / 41
x3 (l)WNkl/ 4 WNk / 2
x4
(l
)WNk
l /
4
l 0
l 0
X 3 (k ) WNk/ 2 X 4 (k )
k 0, 1, , N 1 2
(4.2.9)
第4章 快速傅里叶变换(FFT)
式中
N / 41
r0
2
(4.2.6)
由于X1(k)和X2(k)均以N/2为周期,
kN
WN 2
WNk
且
,因此X(k)又可表示为
第4章 快速傅里叶变换(FFT)
X (k) X1(k) WNk X 2 (k),
X
(k
N 2
)
X1(k)
WNk
X
数字信号处理 答案 第四章

z −1
r sin θ
− r sin θ r cos θ
y ( n)
z −1
网络Ⅱ 解 网络Ⅰ:根据信号流程图写出差分方程
y (n) = 2r cos θ y (n − 1) − r 2 y (n − 2) + x(n)
由差分方程得系统函数
H1 ( z ) =
Y ( z) 1 = X ( z ) 1 − 2r cos θ z −1 + r 2 z −1 1 )(rz −1 − e jθ )
(4)并联型
x ( n)
z −1
1/4 10/3
-7/3
y ( n)
z −1
1/2 将系统函数写成部分分式形式
H ( z) =
−7 / 3 10 / 3 + 1 −1 1 1− z 1 − z −1 4 2
4.4 用直接Ⅰ型和直接Ⅱ型结构实现以下系统函数; (1)
H(z)=
−5 + 2 z −1 − 0.5 z −2 1 + 3z −1 + 3z −2 + z −3
3z 3 + 2 z 2 + 2 z + 5 (2) H(x)=0.8 3 z + 4 z 2 + 3z + 2
解 (1)根据系统函数写出差分方程
y (n) + 3 y (n − 1) + 3 y (n − 2) + y (n − 3) = −5 x(n) + 2 x(n − 1) − 0.5 x(n − 2)
可见网络Ⅰ和网络Ⅱ具有相同极点。 4.3 一个因果线性离散系统由下列差分方程描述:
3 1 1 y(n)- y(n-1)+ y(n-2)=x(n)+ x(n-1) 4 8 3
数字信号处理第四章-数字滤波器的结构
3).H (z)
Y (z) X (z)
(1 bz1) (1 az1)
y(n) ay(n 1) x(n) bx(n 1)
9
10
11
w w
12
转置流图:
w(n) y(n)
原流图:
w(n) ay(n 1) x(n) bx(n 1) 两边作Z变换:
w(n) x(n) aw(n 1) y(n) w(n) bw(n 1) 两边作Z变换:
乘法系数为复数,运算量增加; 系统的稳定性依赖于零、极点相互抵消,对实
现的精度要求很高。在存在有限字长效应的情 况下,有可能造成系统不稳定。
54
确保所有零点、极点在单位圆内。 55
(h(n)为实数)
第k对 极点, 即第k 个与第 N-k个 谐振器 合并
56
谐振频 率不变
还有两点需要注意:(存在实根) 57
1
前言
线性时不变系统用单位冲击响应来表示 系统函数实际上单位冲击响应的Z变换 系统函数反映线性时不变系统的特性 大多数的信号处理可看成是对信号的滤波操作 数字滤波器实际上就是线性时不变系统
因此数字滤波器可以表示为:
2
前言
M
bk zk
H(z) Y(z) / X (z)
k 0 N
1 ak zk
从信号流图中:
可以清楚地看到系统中的运算步骤和运 算结构。FFT时用到了该特点。
运算结构可以直观反映所需的存储单元 和运算次数。由于是数字实现,必然存 在系统误差,运算结构同时也可以反映 系统误差的累积问题。 下面讨论的IIR和FIR滤波器结构将涉及 上述问题。
14
1
15
无限冲击响应滤波器的特点
82
数字信号处理讲义--第4章z变换

数字信号处理讲义--第4章z变换第4章 z 变换[教学⽬的]1.了解Z 变换的概念,能求常⽤函数的Z 变换,能确定Z 变换的收敛域。
2.掌握各种求解Z 逆变换的⽅法,特别是利⽤围线积分求Z 反变换。
[教学重点与难点] 重点:1.Z 变换的概念,常⽤函数的Z 变换求解,Z 变换的收敛域; 2.各种求解Z 逆变换的⽅法,特别是利⽤围线积分求Z 反变换;难点:本章主要内容基本在信号与系统中学过,基本⽆难点,但如学⽣基础较差,还是要从以上三个重点内容去复习。
8.了解离散时间随机信号的概念。
[教学重点与难点] 重点:1.掌握线性时不变系统的概念与性质; 2.离散时间信号与系统的频域表⽰;难点:离散信号系统的性质如线性性,时不变性,因果性,稳定性的判定是本章的⼀个难点。
4.1 Z 变换(1) Z 变换的定义⼀个离散序列x (n )的Z 变换定义为式中,z 是⼀个复变量,它所在的复平⾯称为Z 平⾯。
我们常⽤Z [x (n )]表⽰对序列x (n )进⾏Z 变换,也即这种变换也称为双边Z 变换,与此相应的单边Z 变换的定义如下:∑∞-∞=-=n nz n x z X )()()()]([z X n x Z =∑∞=-=0)()(n nz n x z X这种单边Z 变换的求和限是从零到⽆穷,因此对于因果序列,⽤两种Z 变换定义计算出的结果是⼀样的。
单边Z 变换只有在少数⼏种情况下与双边Z 变换有所区别。
⽐如,需要考虑序列的起始条件,其他特性则都和双边Z 变换相同。
本书中如不另外说明,均⽤双边Z变换对信号进⾏分析和变换。
(2)Z 变换与傅⽴叶变换的关系:单位圆上的Z 变换是和模拟信号的频谱相联系的,因⽽常称单位圆上序列的Z 变换为序列的傅⾥叶变换,也称为数字序列的频谱。
数字频谱是其被采样的连续信号频谱周期延拓后再对采样频率的归⼀化。
单位圆上序列的Z 变换为序列的傅⾥叶变换,根据式(1-54)Z 变换的定义,⽤ej ω代替z ,从⽽就可以得到序列傅⾥叶变换的定义为可得其反变换:(3)Z 变换存在的条件: 正变换与反变换:存在的⼀个充分条件是:∑∞-∞==Ω=??-=Ω==k a Taj e z T k j X T j X e X z X j πωωωω21)(?)()(/nj n j en x e X n x F ωω-∞-∞=∑==)()()]([ωππωππωωd e eX dz z z X j e X F n x n j j n z j ??--=-===)(21)(21)]([)(11||1∑∞-∞=-==n nj j en x e X n x F ωω)()()]([ωπωωππωd e e X n x e X F n j j j )(21)()]([1?--==即:绝对可加性是傅⾥叶变换表⽰存在的⼀个充分条件。
第四章 DFT与其快速算法(数字信号处理)
s
s 2 0
- 0 .5 0
s 2
0 .5
1
s
2π
- 1
π
- 0 .5
0 0
π
0 .5
2π
1
图 4.2.1 模拟频率与数字频率之间的定标关系
第四章 DFT与其快速算法
例 4.2.1设xa(t)=cos(2πf0t), f0=50 Hz以采样频率
fs=200 Hz对xa(t)进行采样, 得到采相信号 x a ( t ) 域离散信号x(n), 求xa(t)和 x a ( t ) x(n)的FT。 解:
是一个以N为周期的周期序列, 称为
的离散
傅里叶级数, 用DFS(Discrete Fourier Series)表示。
第四章 DFT与其快速算法
(4.1.6)
(4.1.7)
(4.1.6)式和(4.1.7)式称为一对DFS。 周期序列分解成N次谐波, 第k个谐波频率为 ωk=(2π/N)k, k=0, 1, 2 … N-1, 幅度为 分量的频率是2π/N, 幅度是
第四章 DFT与其快速算法
4.1 周期序列的离散傅里叶级数 及傅里叶变换
4.1.1周期序列的离散傅里叶级数
~
设 x(n )
~
是以N为周期的周期序列, 由于是周期
2 N
性的, 可以展成傅里叶级数
x(n )
k
j
kn
ake
(4.1.1)
式中ak是傅里叶级数的系数。 为求系数ak , 将上 式两边乘以 e
c os( 2 f 0 n T ) ( t n T )
x a ( t ) 的傅里叶变换用(1.5.5)式确定, 即以Ωs=2πfs
数字信号处理 第4章 信号与系统的复频域分析

极点的分布反映了系统的各种特征。
系统函数往往用零点和极点在S平面上的分 布图来表示,以”○”表示零点,以”×” 表示极点,以“⊙”表示重零点,以”*” 表示重极点。
jω
×
1
○
*
-2
-1
○
01
○
2
σ
×
-1
H
(s)
s(s (s2 2s
求上式的拉氏反变换,就可以得到系统的
冲激响应为:
n
h(t) bm kie pit i 1
每一极点对应一分量 epit ,(有r重极点时对 应 t e r1 pit ),极点位置就决定了该分量 的时域性质。
在H(s)的系数都为实数时,如果有一极点
为复数,必有另一极点是该极点的共轭复 数,同时系数k也将为共轭复数,一对共轭 极点组成的响应分量仍然为实数。
系统稳定性:对于任何一个有界的激励, 稳定系统产生的响应在任何时候都是有界 的。也就是要求系统的冲激响应有界(随 着t→∞,|h(t)|将逐渐衰减到零)。系统的 冲激响应的时域性质可由系统函数的极点 位置确定,因此,系统的稳定性可由系统 函数的极点位置来判断。
1、系统函数的极点全部位于左半S平面时, 随着t→∞将逐渐衰减到零,系统稳定。因
1
F (s)estds F (s)estds
2 j C0 Ci
Ci
0
k
Re
s(sk
)
1
2
j
Ci
F
(s)e st ds
F (s)estds 0 t 0
C1
F (s)estds 0 t 0
C2
数字信号处理-答案第四章

y
l 1
m
( n) ,然后对它求一次 N 点
DFT , 即可计算 X ( z )在单位圆上的 N点抽样 (b)若:N M,可将x ( n)补零 到N点, 即 x ( n) x0 ( n ) 0 则:X (e
j 2 k N
0 n M 1 M n N 1
令 X 1 (k0 , n1 , n0 )
n2 0
x(n , n , n )W
2 1 0 1 ' 1
2
n2 k 0 3
,
k0 0,1,2
X 1' (k0 , n1 , n0 ) X 1 (k0 , n1 , n0 )W6n1k 0 X 2 (k0 , k1 , n0 )
n1 0
2 . 已知X (k ),Y (k )是两个N点实序列x(n), y(n)的DFT值, 今需要从 X (k ),Y (k )求x(n), y (n)值, 为了提高运算效率, 试用一个N点IFFT 运算一次完成。
解 : 依据题意 : x ( n ) X ( k ); y ( n ) Y ( k ) 取序列 Z ( k ) X ( k ) jY ( k ) 对Z ( k )作N点IFFT可得序列 z ( n ). 又根据DFT性质: IDFT [ X(k) jY(k) ] IDFT( [ X( k ) ] jIDFT [Y(k) ] x ( n) jy(n) 由原题可知: x(n),y(n) 都是实序列, 再根据 z(n) x ( n) jy(n) 可得:x(n) Re[ z(n) ] y(n) Im[z(n) ] 综上所述,构造序列 Z(k) X(k) jY(k)可用一次 N点IFFT完成计算x(n),y(n) 值的过程。
数字信号处理-时域离散随机信号处理(丁玉美)第4章

(4.2.11)
Pxx (e j ) FT[rxx (m)]
第四章 功 率 谱 估 计
1 sin( N / 2) WB (e ) FT [ wB (m)] sin( / 2) N
j
2
(4.2.12)
WB(ejω )称为三角谱窗函数。(4.2.11)式表明,周期图的统计
必须将求和域(-M+1, M-1)移到(0~L-1),功率谱的计算公式
如下:
ˆ PBT (e jω ) S xx (m)e- jωm ˆ PBT (k ) FFTS xx (m)
m 0
L 1
k=0, 1, 2, …, L-1
第四章 功 率 谱 估 计
ˆ 0≤m≤M-1 rxx (m) w( m) M≤m≤L-M-1 S xx (m) 0 r (m L) w(m L) L-M≤m≤L-1 ˆxx
第四章 功 率 谱 估 计
4.2.2 周期图法
将功率谱的另一定义(4.1.6)式重写如下:
2 N 1 j jn Pxx (e ) lim E Nx(n)e N 2 N 1 n
如果忽略上式中求统计平均的运算,观测数据为:x(n) 0≤n≤N-1, 便得到周期图法的定义:
4.2.1 BT法 BT法是先估计自相关函数, 然后按照(4.1.1)式进行傅里叶变
换得到功率谱。设对随机信号x(n),只观测到一段样本数据, n=0, 1, 2, …, N-1。 关于如何根据这一段样本数据估计自相关函 数, 第一章已经作了详细介绍,结果是共有两种估计方法, 即有 偏自相关函数估计和无偏自相关函数估计。有偏自相关函数估 计的误差相对较小,这种估计是一种渐近一致估计, 将该估计
数字信号处理第4章部分习题详解
)( 2 k1 k0 ) n1k0 ( 2 n 2 n3 级间旋转因子 W16 。 W16
4
22 n1 2n2 n3 23 n0
0000 1000 0100 1100 0010 1010 0110 1110 0001 1001 0101 1101 0011 1011 0111 1111 x(0) x(8) x(4) -j x(12) x(2) x(10) x(6) -j x(14) x(1) x(9) x(5) -j x(13) x(3) x(11) x(7) x(15) -j -1 -1 -1 -1 -1 -1 -1 -1
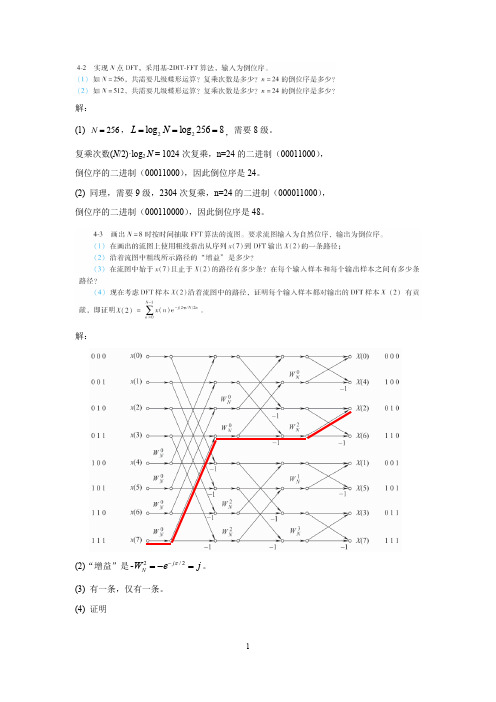
nk X (k ) x(n)WN n 0 N 1
1
1
n3 0 n2 0 1
x(n n n n )W
n1 0 1 n0 0 1 0 1 2 3 0 1 2 3
1
1
1
( 23 n0 2 2 n1 2 n2 n3 )( 23 k3 2 2 k 2 2 k1 k0 ) 16
3
n1 0
3
3 n1 ( 4 k1 k 0 ) x(n0 n1 )W4n0 k 0 W16 n 0 0
n1k0 X 1 (n1k0 ) W16 W4n1k1 X 2 (k1k0 ) n1 0
n1 k 0 其中 W16 是级间旋转因子。
n3 0 n 2 0 1 1
n1 0
1 n3 ( 2 2 k 2 2 k1 k 0 ) x(n0n1n2n3 )W2n0 k 0 W4n1k 0 W2n1k1 W8n2 ( 2 k1 k 0 ) W2n2 k 2 W16 W2n3 k3 n 0 0
《数字信号处理》 第4章

右图为描述倒位序的树状图(N=8)
5 倒位序的实现
对照表
变址功能
产生倒序数的十进制运算规律 N=2M,用M位二进制数表示,则从左至右的十进制权值为:
N 1 4
x1(2l)WNk22l
N 1 4
x1(2l
1)WNk22l1
r0
l0
l0
N1
N1
4
4
x3(l)WN kl4WN k2 x4(l)WN kl4
l0
l0
X 3(k) W N k2X 4(k),k0 ,1 ,
,N 1 2
式中
N1 4
N1 4
X3(k)DFTx3(l) x3(l)WN kl4 X4(k)DFTx4(l) x4(l)WN kl4
47线性调频变换chirp变换算法471算法原理已知序列xn0nn1是有限长序列其z变换为为适应z可沿z平面更一般的路径取值就沿z平面上的一段螺线作等分角的采样z的这些采样点zk为因此有其中a决定起始采样点z0的位置a0表示z0的矢量半径长度通常取a010表示z0的相角0表示两相邻采样点之间的角度差w0一般为正值表示螺线的伸展率图471线性调频变换在平面的螺线采样当mn即时各采样点zk就均匀等间隔地分布在单位圆上这就是求序列的dft
N
W N k(N n)W N (N k)nW N kn,
W
2 N
1
N
k
WN 2
WNk
利用这些特性,使DFT运算中有些项可以合并,并且可以 将长序列的DFT分解为几个短序列的DFT,以减少DFT的运算 次数。
数字信号处理第四章
离散时域信号和系统有时域和频域两种表示, 离散时域信号和系统有时域和频域两种表示, 时域和频域两种表示 之前的分析和讨论都是以假定信号为确定性为基础 的。所谓确定性是指序列在每一点上的值都可以由 数学表达式,数据链表或某种法则确定, 数学表达式,数据链表或某种法则确定,也就是说 信号的过去、当前和未来的值都是确知的。对于确 信号的过去、当前和未来的值都是确知的。 来表示。 定性信号,我们可以用Z变换或者傅里叶变换来表示 定性信号,我们可以用Z变换或者傅里叶变换来表示。 然而在实际工程问题中,我们遇到的离散时间 然而在实际工程问题中, 信号或数据往往是无法用确定的数学解析式或数据 链表来表示的, 链表来表示的,有可能描述这种信号的参变量是随 机变量,我们将这类信号称为随机信号。 机变量,我们将这类信号称为随机信号。
功率谱密度
Pxx (ω ) = F [φ xx (m)] = ∑ m =∞ φ xx (m)e jω m = ∑ m =∞
∞ ∞
A2 cos mω 0 e jω m 2
A2π = [δ (ω + ω 0 ) + δ (ω ω 0 )] 2
四、修正
& & 若 x ≠ 0,则定义 x(n) = x(n) x 即 E[ x (n)] = 0则有
lim lim 即 m→∞ γ xx (m) = m→∞ φxx (m) < ∞ , φ xx (m) 是绝对可和的
φ 存在傅里叶变换和Z变换, 所以当 x = 0 时, xx (m) 存在傅里叶变换和Z变换,
即有 Pxx (ω ) = F [φxx (m)] = ∑ m=∞ φxx (m)e jω m ,功率谱密度函数
离散随机信号的频谱(功率谱) 离散随机信号的频谱(功率谱)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DIT-FFT的运算过程很有规律。N=2M点的FFT共进
行M级运算,每级由N/2个蝶形运算组成。
同一级中,每个蝶形的两个输入数据只对计算本蝶 形有用,而且每个蝶形的输入、输出数据结点又同在一 条水平线上,即计算完一个蝶形后,所得输出数据可立 即存入原输入数据所占用的存贮单元。
这种利用同一存贮单元存贮蝶形计算输入、输出数 据的方法称为原位(址)计算。
N X (k ) X 1 (k ) W X (k ) k 0,1, 1 2 运算量减少近一半: N N k 2 2 2 X (k ) N X ) /4)+ WN X ) k 0,1, 1 (N (N +N/2 1 (k 2 ( k /4) 2 2
k 仅经过一次分解,就使 N 2
(4.2.10)
式中:
N/4点DFT
第4章 快速傅里叶变换(FFT)
用同样的方法,将x2(r)按奇偶分解,可得:
X 5 (k )
其中
N / 4 1
il=0 0
kl x5 (l )WN / 4 DFT [ x5 ( l )]
X 6 (k )
N / 4 1 0 li =0
kl x6 (l )WN / 4 DFT [ x6 (l )]
N , l 0,1, , 1 x4 (l ) x1 (2l 1) 4
那么,X1(k)又可表示为:
, k 0,1, , N / 4 1 k X 1 (k N / 4) X 3 (k ) WN / 2 X 4 (k )
k X 1 (k ) X 3 (k ) WN / 2 X 4 (k )
N=2M,原输入序列的顺序表示为:n =(nM-1nM-2…n1n0) 2
对输入数据次序的变化可根据一个简单的位对换规则进行 (称为倒位序): n’=(n0n1 …n M-2 nM-1) 2 当把输入数据进行了重新排序,则输出结果是正确的次序。 例:n=23,输入序“6”重新排序后为“3”,因为6=1102倒位序 后n’= 0112=3。
将N点DFT变成 M 级蝶形运算。 (2)特点:运算流程图结构规则,可原位计算,程序简单。
第4章 快速傅里叶变换(FFT)
设序列x(n)的长度为N,且满足:
N 2M ,
x1 ( r ) x(2r ),
M 为自然数
r 0,1, N 1 2 N r 0,1, 1 2
m WN WNN m m N 2
或者 [WN
N m
m ] WN
(4.2.3)
WN
m WN
0 WmN的特殊值为: WN 1;
W
n N
N 2 N
1;
WN
N 4
j
WmN的可约性为: W rn
rN
W
第4章 快速傅里叶变换(FFT)
(2)把N点DFT分解为几个较短DFT的组合,可使乘法次 数大大减少。 FFT算法就是不断地把长序列的DFT分解成几个短序列的 DFT,并利用旋转因子的周期性和对称性来减少DFT的运算次 数。
N点DFT 分解成了 A(3) 经过M-1次分解,将 A(3) A (3) 2 0 W N ,因此N=2M时,FFT N/2 个 2 点的 DFT WN A(4) A(4) A(4) 0 总共需要M级运算,每级N/2个蝶形。 WN A(5) A(5) A(5) 1 W N 0 WN A(6) A(6) A(6) 2 0 W N WN A(7) A(7) A(7) 3 2 W N 0 WN WN
图4.2.4 N点DIT-FFT运算流图(N=8) WN/21= WN2
A(7)
X(7)
第4章 快速傅里叶变换(FFT)
4.2.3 DIT―FFT算法与直接计算DFT运算量的比较 每一级运算都需要 N/2次复数乘和 N次复数加(每个蝶形需要 两次复数加法)。 所以,M级运算共需运算量为:
复数乘法: m(M)=(N/2) M=(N/2) log2 N 复数加法: a(M)= N M= N log2 N
例如,N=210=1024时
直接计 算 FFT算法
N2 1048576 204.8 ( N / 2)log2 N 5120
在实际运算中,FFT的运算量还要减少,因为WNN=1, WN0=1,WNN/2=-1,WNN/4=-j,此时不需进行复数乘法。
第4章 快速傅里叶变换(FFT)
4.2.4 DIT-FFT的实现 1.原位计算
X1 (0) X1 (1) X1 (2) X1 (3) X2 (0) X2 (1)
0 WN 2 1 WN 2
X(0) X(1) X(2) X(3)
W
1 N 2
WN
WN
1
0
X(4) X(5) X(6) X(7)
X2 (2) X2 (3)
WN
2
WN
3
图4.2.3 N点DFT的第二次时域抽取分解图(N=8)
所以
X (k )
N / 21
r 0
kr k x1 ( r )WN W /2 N
N / 21
r 0
kr k x2 ( r )WN X ( k ) W /2 1 N X 2 (k )
k=0,1,…,N-1 其中X1(k)和X2(k)分别为x1(r)和x2(r)的 N/2 点DFT 由于X1(k)和X2(k)均以 N/2为周期,则由复指数序列的 周期性可得:
第4章 快速傅里叶变换(FFT)
N=8时,x3(l)和x4(l) 已是两个长度为2的子序列:
x(0) x(4) x(2) x(6) x(1) x(5) x(3) x(7) A(0) A(1) A(2)
WN
0
A(0) A(1) A(2)
0 WN
A(0) A(1) A(2)
A(0)
X(0) X(1) X(2) X(3) X(4) X(5) X(6)
按n的奇偶把x(n)分解为两个N/2点的子序列:
x2 ( r ) x(2r 1),
则x(n)的DFT为:
第4章 快速傅里叶变换(FFT)
2 虽然k=0,1,…,N-1,但从此式只能方便 j kr 2 N DFT j 2 kr系数,那么,还有N/2 地得到 N/2 个 2 kr 2 kr e N e 2 WN 由于 WN /2 个DFT系数如何方便地得到呢?
(4.2.7) (4.2.8)
这样将N点DFT分解为两个N/2点的DFT运算,用如图所示 的流图符号(蝶形)表示。
第4章 快速傅里叶变换(FFT)
X1 (0) N/2点 X1 (1) X1 (2) DFT X1 (3) X2 (0) N/2点 X2 (1) X2 (2) DFT X2 (3)
x(0) x(2) x(4) x(6) x(1) x(3) x(5) x(7)
N/4点DFT
x5 (l ) x2 (2l )
, l 0,1, N / 4 1 x6 (l ) x2 (2l 1)
第4章 快速傅里叶变换(FFT)
, k 0,1, , N / 4 1 k X 1 (k N / 4) X 3 (k ) WN / 2 X 4 (k )
X 1 (k ) X 1 (k N ) 2 X 2 (k ) X 2 (k N ) 2
第4章 快速傅里叶变换(FFT)
另外由旋转因子WmN的对称性:
k WN WN 要完成一个蝶形运算, k N 2
所以:
需一次复数乘和两次复数加法运算。
k N N N 2 X ( k ) X 1 ( k ) WN X 2 ( k ) 2 2 2 k X 1 ( k ) WN X 2 (k ) N
DSP芯片实现
TI公司的TMS 320c30,10MHz时钟,基2-FFT1024点 FFT时间15ms。
第4章 快速傅里叶变换(FFT)
4.2 基2FFT算法
4.2.1 直接计算DFT的特点及减少运算量的基本途径 一、直接计算DFT的运算量 长度为N的有限长序列x(n)的DFT为:
kn X (k ) x(n)WN , k 0,1, , N 1 n 0 N 1
第4章 快速傅里叶变换(FFT)
对N=2M的一般情况,第L级的旋转因子为
第4章 快速傅里叶变换(FFT)
第4章 快速傅里叶变换(FFT)
第4章 快速傅里叶变换(FFT)
5、序列的倒序 DIT-FFT算法的输入序列的排序看起来似乎很乱,但实际
排序是很有规律的。
实现按时间抽取FFT算法的关键是将输入数据排列成满足 连续运用奇偶分解所需的次序。
X(0) X(1) X(2) X(3)
WN
WN
1
0
X(4) X(5) X(6) X(7)
WN WN
3
2
图4.2.2 N点DFT的一次时域抽取分解图(N=8)
第4章 快速傅里叶变换(FFT)
由于N=2M,与第一次分解相同,将x1(r)按奇偶分解
成两个N/4长的子序列x3(l)和x4(l),即:
x3 (l ) x2 (2l )
在DFT定义式中只有两种运算:x(n)与WmN的乘和加, WmN的特性 对运算量必有影响。 (1)根据旋转因子WmN的周期性、对称性和特殊值减少乘法运算次数。
WmN的周期性表现为:
mlN WN e j 2 ( mlN ) N
e
j
2 m N
m WN
(4.2.2)
WmN的对称性表现为:
第4章 快速傅里叶变换(FFT)
第4章 快速傅里叶变换(FFT)
4.1 引言
4.2 基2FFT算法
4.3 进一步减少运算量的措施