埃斯顿机器人ER系列电气维护手册(二代控制)
埃斯顿伺服器用户手册
P roNet系列交流伺服用户手册
P roNet SERIES AC SERVO USER MANUAL
(版本号:V1.06)
手册概要
⏹本手册以ProNet型伺服驱动器的用户为对象,就下列内容作以说明:
·伺服电机及伺服单元的到货确认及规格型号
·伺服电机及伺服单元的安装方法
·伺服电机及伺服单元的配线方法
·伺服驱动器的运行方法
·面板操作器的使用方法
·通讯协议
·伺服电机及伺服单元的技术规格和特性
⏹本手册的适用阅读对象如下:
·ProNet伺服驱动器的程序设计及详细设计工作者
·ProNet伺服驱动器的安装及配线工作者
·ProNet伺服驱动器的试运行及伺服调整工作者
·ProNet伺服驱动器的维护及检修工作者
⏹本手册中基本术语的含义:
本手册中,在没有特殊说明的情况下,下列术语所表达的意思如下∶
伺服电机:EMG,EMJ,EML,EMB 型伺服电机
伺服单元:ProNet型伺服单元
伺服驱动器:一组伺服电机与伺服单元
伺服系统:由伺服驱动器与上级装置以及外围机器配套组装成的一组伺服控制系统
[使用前的注意事项]
■严禁将伺服电机直接与市网电源连接。
严禁将伺服电机直接与市网电源连接,极易损坏伺服电机。伺服电机没有伺服单元的支持,不能旋转。
■接通电源后禁止插、拔驱动器上的接插件。
带电插、拔极易损坏驱动器的内部电路和电机编码器,请在断电后再插、拔接插件。
■断电5分钟后才能进行伺服系统的检查作业。
即使切断电源,伺服单元内部的电容中仍然存储有相当的电量,为了防止触电事故的发生,建议在确认CHARGE指示灯灭之后,再过5分钟才能开始进行伺服系统的检查操作。
埃夫特 ER 系列机器人 操作手册说明书
3.3 控制权限 ..................................................................................................................................30
3 本手册的阅读对象 ........................................................................................................................8
4 操作手册阅读指南 ........................................................................................................................8
4.4 DH 参数 .................................................................................................................................... 44
东方爱斯特恩ER系列工业机器人产品手册说明书

400 025 3336
Service Hotline ESTUN Robotics Engineering Co., Ltd.
Weight
ER12-1510-H5
ER12-1510
ER20-1780
ER20/10-2000-HI
ER30-1880
ER50-2100
10
30
50
ER6-1600
ER6-1450-H
Max.load capacity
Max.load capacity
Max.load capacity
Max.load capacity
Max.load capacity
Max.load capacity
Max.load capacity
Max.load capacity
1510mm ±0.05mm 1780mm
±0.06mm 2000mm
±0.07mm 1880mm
±0.08mm
2100mm
±0.15mm
1510mm
±0.05mm Arm Range
Arm Range
Repeatability
Repeatability Arm Range
Repeatability
Arm Range
Repeatability
Arm Range
Repeatability
Arm Range
Repeatability
Arm Range
Repeatability
1450mm
±0.08mm Arm Range Repeatability
1600mm
±0.08mm 168
245
248
255
600
170
155
164
±170°-60° ~ +160°-165° ~ +88°±180°±50°
±170°-60° ~ +160°-165° ~ +88°±180°±140°±360°
机器人设备维护保养手册
2.1 机器人本体日常清洁保养 ............................................................................................................................... 11 2.1.1 机器人保护罩的安装和清洁 .................................................................................................................. 11 2.2.2机器人本体清洁....................................................................................................................................... 14
埃斯顿机器人紧凑型电控箱说明书
埃斯顿机器人紧凑型电控箱说明书
一、基本技术数据:
1.电源:380VAC 50HZ 三相四线制
2.工作环境:
(1)环境温度:-20℃~160℃。(2)相对湿度:≤85%(20℃)。(3)周围不含强腐蚀性、易燃易爆介质及导电尘埃
二、工作原理:
埃斯顿机器人紧凑型电控箱电气工作原理:线路图有主电路、
控制电路和显示电路等组成,,其主要元器件均按装在电控箱内。
三、安装和调试
1.将与电装匹配的控制箱固定在墙壁上或支架上;
2.对照电控箱电气原理图(一般随箱插在控制面板后)和端子
接线图,用电缆按对应的线号把控制箱和电动装置的端子连接起来,做好接地;
3.把三相电源分别接到电控箱的相对应的端子上;
4.在阀门处于中间位置时,按“开阀”或“关阀”按钮,检查
阀门的旋向是否与按钮一致,如果不一致则调换电机电源相序;
5.在装有开度表的控制面板上,在阀门“开阀”“关阀”的过
程中,检查开度表指针是否正常;当阀门处于“全开”位置时,检
查开度表指针是否指示在满刻度,如有误差,调整面板上的电位器
微调;
6在基本型控制面板上,当阀门处于全开状态时,控制面板上
的红色“开阀”指示灯亮,表示“阀全开”;当阀门处于全关状态时,控制面板上的绿色“关阀”指示灯亮,表示“阀全关”;当阀
门开向过力矩或关向过力矩,控制面板上“停止”指示灯亮,表示“故障”;
7.控制面板上的选择开关置于“就地”指适于在本控制箱上操作,置于“远程”指适于在远程控制室控制。
四、特别提示:
由于电控箱是与电动执行器配套使用,因电动执行器厂家不同,具体的如何接线安装详见与其配套的阀门电动装置使用说明书。
埃斯顿机器人 SCARA 系列 本体使用说明书
SCARA系列本体使用说明书
ESTUN机器人SCARA系列
本体使用说明书
M-0601CN-10
感谢您使用埃斯顿机器人产品。
在使用机器人之前,务必仔细阅读机器人安全使用须知,并在理解该内容的基础上使用机器人。
本公司致力于不断提升产品品质,本手册中与产品有关的规格和信息如有改动,恕不另行通知。
本手册中所有陈述、信息和建议均已经过慎重处理,但不保证完全正确。本公司对于因使用本手册而造成的直接或间接损失不负任何责任。
用户必须对其应用任何产品负全部责任,须谨慎使用本手册及产品。
本手册所有内容的解释权属南京埃斯顿机器人工程有限公司。
本手册未对任何一方授权许可,不得以任何方式复制和拷贝其中的全部或部分内容。
版权所有:南京埃斯顿机器人工程有限公司
产品服务热线:400-025-3336
地址:南京市江宁经济开发区吉印大道1888号邮编:211102
电话:************
公司主页:
电子邮箱:***************
安全使用须知
请由具有资格的人员进行机器人与相关设备的安装与搬运。另外,请务必遵守各国的相关法规与法令。安装机器人系统或连接电缆之前,请阅读本手册与相关手册,正确地进行使用。
安全标示
本手册中若出现如下标示的说明内容,用户必须仔细阅读并严格遵守。
设计与安装注意事项
请由经过培训的人员进行机器人系统的设计与设置。这里所说的经过培训的人员是指经过本公司与海外当地法人举办的引进培训及维护培训的人员,或与熟读本手册并经过培训的人员具有同等专业知识和技能的人员。
为了确保安全,请务必对机器人系统安装安全护板。
埃斯顿 ER100-3550-DW 机器人说明书

ESTUN机器人ER100-3550-DW
本体使用说明书
感谢您使用埃斯顿机器人产品。
在使用机器人之前,务必仔细阅读机器人安全使用须知,并在理解该内容的基础上使用机器人。
本公司致力于不断提升产品品质,本手册中与产品有关的规格和信息如有改动,恕不另行通知。
本手册中所有陈述、信息和建议均已经过慎重处理,但不保证完全正确。本公司对于因使用本手册而造成的直接或间接损失不负任何责任。
用户必须对其应用任何产品负全部责任,须谨慎使用本手册及产品。
本手册所有内容的解释权属南京埃斯顿机器人工程有限公司。
本手册未对任何一方授权许可,不得以任何方式复制和拷贝其中的全部或部分内容。
版权所有:南京埃斯顿机器人工程有限公司
产品服务热线:400-025-3336
地址:南京市江宁经济开发区吉印大道1888号邮编:211102
电话:************
公司主页:
电子邮箱:***************
安全使用须知
本章说明为安全使用机器人而需要遵守的内容。在使用机器人之前,务必熟读并理解本章中所述内容。
使用埃斯顿机器人的公司、个人应该熟读所在地区、国家的标准和法律,并且安装适当的安全设施保护机器人的使用人员。使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。但是使用人员即使完全按照手册中给出的所有安全信息进行,埃斯顿公司也无法保证使用人员不会受到任何伤害。
使用人员的定义
使用人员的定义如下所示。
•操作人员
进行机器人的电源ON/OFF操作。
ER20-C10 机器人电气操作维护手册20130419
安徽埃夫特智能装备有限公司
ER20-C10 机器人电气操作维护手册
目录
1 安全注意事项.............................................................................................................................. 1 1.1 机器人安全使用须知....................................................................................................... 1 1.1.1 操作调试机器人时的安全注意事项.................................................................... 1 1.1.2 机器人本体的安全对策........................................................................................ 3 1.1.3 试车安全对策........................................................................................................ 5 1.1.4 自动运转的安全对策............................................................................................ 5 1.2 以下场合不可使用机器人............................................................................................... 6 1.3 安全操作规程................................................................................................................... 6
埃斯顿机器人ER系列机器人操作手册
安全注意事项
使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”、“注意”、“强制”、“禁止”四类分别记载。
误操作时有危险,可能发生死亡或重伤事故。
误操作时有危险,可能发生中等程度伤害、轻伤事故或物件损坏。
必须遵守的事项
禁止的事项
即使是属于“注意”类的事项,也会因情况不同而产生严重后果,故任何一条“注意”事项都极为重要,请务必严格遵守。
虽然不符合“注意”或“危险”的内容,但为了确保安全和有效的操
作,用户也必须遵守的事项,将会在相关处加以叙述。
●操作机器人前,按下机器人电控柜前门及示教器上的急停键,并确认伺服电源被切断。伺服紧急情况下,若不能及时制动机器人,则可能引发人身伤害或设备损坏事故。
急停键
●解除急停后再接通伺服电源时,要解除造成急停的事故后再接通伺服电源。
由于误操作造成的机器人动作,可能引发人身伤害事故。
急停状态解除
●机器人在正常运行过程中拍下急停属于非法操作,会明显减少电机及减速机的使用寿命,只有在紧急情况下如操作人员遇到潜在的危险等情况下可拍下急停按钮。
●在机器人动作范围内示教时,请遵守以下事项:
- 保持从正面观看机器人。
- 遵守操作步骤。
- 考虑机器人突然向自己所处方位运动时的应变方案。
- 确保设置躲避场所,以防万一。
■由于误操作造成的机器人动作,可能引发人身伤害事故。
●进行以下作业时,请确认机器人的动作范围内没人,并且操作者处于安全位置操作:- 机器人电控柜接通电源时。
埃夫特智能装备股份有限公司 ER8-1300 工业机器人机械使用维护手册说明书

ER8-1300工业机器人机械使用维护手册
声明
感谢您购买埃夫特机器人产品,为确保已对产品进行正确的设置,请您在使用本产品之前,务必仔细阅读本操作手册。本声明及手册所提及的内容涉及您的人身及财产安全,若不遵循或不按照手册的说明与警告而擅自操作,可能会给您和周围的人带来人身伤害或给埃夫特机器人或周围的其他物品造成财产损失。本声明及手册为截至本批次产品出厂前的最新版本,后续请通过访问官方网站以获取更新的信息。
本手册仅作为对产品进行正常操作的指导,在产品使用过程中,埃夫特公司并不对除产品缺陷外的其他原因引发的人身伤害、财产损失承担责任。埃夫特公司郑重建议:参与机器人操作、示教、维护、维修、点检等相关活动的人员,在学习完毕埃夫特公司准备的培训课程前,请勿赋予其对机器人的操作使用权限。
版本号:V1.2
目录
第1章安全 (1)
1.1机器人安全使用须知 (1)
1.1.1进行调整、操作、保全等作业时的安全注意事项 (1)
1.1.2机器人本体的安全对策 (2)
1.2机器人的转移、转让、变卖 (5)
1.3机器人的废弃及环境控制要求 (6)
第2章基本说明 (7)
2.1机器人系统构成 (7)
2.2开箱检查 (7)
2.3机械本体铭牌 (8)
2.4本体部分组成及各轴方向标识 (8)
2.5机械本体各轴硬限位及零标位置 (9)
2.6机器人性能参数 (11)
2.7手腕部分负荷允许值 (13)
2.7.1可允许搬运重量 (13)
2.7.2允许最大静态负荷扭矩 (13)
2.7.3允许最大惯性矩 (13)
2.7.4允许负载曲线图 (13)
埃斯顿机器人ER系列电气维护手册(二代控制)
必须遵守的事项
禁止的事项
即使是属于“注意”类的事项,也会因情况不同而产生严重后果,故任何一条“注意”事项都 极为重要,请务必严格遵守。
虽然不符合“注意”或“危险”的内容,但为了确保安全和有效的操 作,用户也必须遵守的事项,将会在相关处加以叙述。
2
ER系列机器人电气维护手册
危险
● 操作机器人前,按下机器人电控柜前门及示教编程器上的急停键,并确认伺服电源被 切断。伺服紧急情况下,若不能及时制动 机器人,则可能引发人身伤害或设备损坏 事故。
急停键 ● 解除急停后再接通伺服电源时,要解除造成急停的事故后再接通伺服电源。 由于误操作造成的机器人动作,可能引发人身伤害事故。
急停状态解除 ● 机器人在正常运行过程中拍下急停属于非法操作,会明显减少电机及减速机的使用寿 命,只有在紧急情况下如操作人员遇到潜在的危险等情况下可拍下急停按钮。
● 在机器人动作范围内示教时,请遵守以下事项: - 保持从正面观看机器人。 - 遵守操作步骤。 - 考虑机器人突然向自己所处方位运动时的应变方案。 - 确保设置躲避场所,以防万一。 ■ 由于误操作造成的机器人动作,可能引发人身伤害事故。 ● 进行以下作业时,请确认机器人的动作范围内没人,并且操作者处于安全位置操作:
第7章 系统诊断
7.1 系统版本. . . . . . .. .. . . . .. . . . .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .7 7.2 输入输出状态. . . . . . .. .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .. . .. . .7 7.3 报警历史. . . . . . .. .. . . . .. . . . .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .7 7.4 当前位置画面. . . . . . .. .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .. . .. . .7
机器人维护保养说明书
机器人维护保养说明书
第一章介绍
本说明书旨在帮助用户正确地维护和保养机器人,以确保其正常运
行和延长使用寿命。机器人是一种先进的自动化设备,它的正常运转
需要定期的维护和保养。请仔细阅读本说明书,并按照指示进行操作。
第二章环境要求
1. 温度:机器人的工作环境应在5℃至40℃之间,避免过高或过低
的温度对机器人的影响。
2. 湿度:机器人的工作环境湿度应在85%以下,过高的湿度可能导
致机器人元件受潮损坏。
第三章维护程序
1. 维护计划:建议用户根据机器人使用的频率和工作环境制定维护
计划,确保按时进行维护。
2. 清洁:定期清洁机器人外壳和零部件,可使用软布擦拭,并避免
使用腐蚀性或磨损性强的清洁剂。
3. 润滑:机器人的运动部件可能需要定期润滑,使用适合的润滑剂,并注意润滑剂的数量和频率。
4. 检查:定期检查机器人的连接线和电气部件,确保其紧固度和正
常工作状况。
第四章故障处理
1. 常见故障:介绍机器人常见的故障类型和可能的原因,如电源故障、机械故障、传感器故障等。
2. 故障排除:根据故障类型和可能原因提供具体的故障排除步骤,以帮助用户快速解决问题。
第五章安全注意事项
1. 操作规范:使用机器人时,请确保操作人员具备相关技术和安全知识,遵守相关操作规范。
2. 电源安全:在维护和保养机器人时,请务必断开电源,并确保维修人员的安全。
3. 防止误操作:避免非授权人员擅自操作机器人,以免发生人身伤害或设备损坏。
第六章其他注意事项
1. 保修政策:说明机器人的保修期限和保修范围,并提供售后服务的联系方式。
2. 升级升级:介绍机器人固件和软件的升级方法和注意事项。
埃夫特 ER12-4-2000 工业机器人电气使用维护手册说明书
埃夫特智能装备股份有限公司
服务热线(Tel):400-0528877
ER12-4-2000 工业机器人电气使用维护手册
声明
感谢您购买埃夫特机器人产品,为确保已对产品进行正确的设置,请 您在使用本产品之前,务必仔细阅读本操作手册。本声明及手册所提及的 内容涉及您的人身及财产安全,若不遵循或不按照手册的说明与警告而擅 自操作,可能会给您和周围的人带来人身伤害或给埃夫特机器人或周围的 其他物品造成财产损失。本声明及手册为截至本批次产品出厂前的最新版 本,后续请通过访问 www.efort.com.cn 官方网站以获取更新的信息。
Байду номын сангаас
ER12-4-2000 工业机器人电气使用维护手册
目录
第 1 章 安全...............................................................................................................................1 1.1 安全须知................................................................................................................ 1 1.2 安全准则................................................................................................................ 1 1.3 各工作过程中的安全注意事项............................................................................ 2 1.3.1 机器人安装和连接的安全............................................................................ 2 1.3.2 机器人启动前的安全.................................................................................... 3 1.3.3 机器人启动的安全........................................................................................ 4 1.3.4 试车安全........................................................................................................ 4 1.3.5 示教过程中的安全........................................................................................ 5 1.3.6 自动运行时的安全........................................................................................ 6 1.3.7 维修时的安全................................................................................................ 6 1.3.8 点检和维护时的安全.................................................................................... 7
埃斯顿机器人调试作业指导书V3
埃斯顿机器人调试作业指导书
1、 目的
为了保证成品机器人的质量,特制定本标准。
2、适用范围
该规范适用于所有产品机器人调试流程。
3、引用标准
GB/T 5226.1-2002 机械安全机械电气设各第1部分:通用技术条件
4、调试步骤
4.1首先核对电柜序列号、型号与与机器人本体是否相符。
4.2确认机器人控制柜检验合格。参考《埃斯顿机器人成品电柜检验流程》。(注:电柜通过《埃
斯顿机器人成品电柜检验流程》方可出库入库)
4.3核对电柜校线报告清单,确认校线通过方可上电。(注:校线报告由埃斯顿提供)
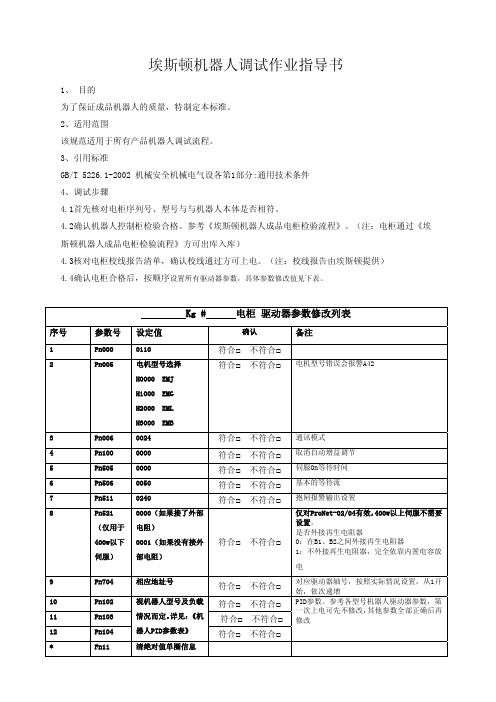
4.4确认电柜合格后,按顺序设置所有驱动器参数,具体参数修改值见下表。
Kg # 电柜 驱动器参数修改列表
序号 参数号 设定值 确认 备注
1 Pn000 0110 符合□ 不符合□
2 Pn005 电机型号选择
H0000 EMJ
H1000 EMG
H2000 EML
H3000 EMB
符合□ 不符合□电机型号错误会报警A42
3 Pn006 002
4 符合□ 不符合□ 通讯模式
4 Pn100 0000 符合□ 不符合□取消自动增益调节
5 Pn505 0000 符合□ 不符合□伺服On等待时间
6 Pn506 0050 符合□ 不符合□基本的等待流
7 Pn511 0240 符合□ 不符合□抱闸报警输出设置
8 Pn521
(仅用于
400w以下
伺服) 0000(如果接了外部
电阻)
0001 (如果没有接外
部电阻)
符合□ 不符合□
仅对ProNet-02/04有效,400w以上伺服不需要
设置。
是否外接再生电阻器
0:在B1、B2之间外接再生电阻器
ER 系列工业机器人 ModbusTCP 调试手册说明书
ER系列工业机器人ModbusTCP调试手册
(RCS2 V1.5)
修订记录
目录
前言 (3)
第1 章功能简介 (4)
第2 章ModBusTcp协议介绍 (4)
2.1 ModBusTCP协议报文 (4)
2.2 ModBusTCP协议功能码 (5)
2.3 ER系列机器人ModBusTCP接口定义 (5)
第3 章ModBusTCP点表 (7)
第4 章接口调试 (12)
4.1 ModScan调试助手 (12)
4.2虚拟数字量交互示例 (14)
4.3虚拟模拟量交互示例 (16)
4.4远程启动机器人程序 (17)
4.5远程加载机器人程序 (18)
4.6远程复位程序指针 (20)
4.7调试注意事项 (21)
前言
概述
本手册适用于控制系统RCS2 V1.5,描述埃斯顿二代控制器ModBusTcp协议接口功能介绍。
读者对象
本手册仅供受过培训,熟悉各种适用国家标准的“控制、自动化和驱动工程”
领域专业人员。
●系统生产商:对自动化系统功能设计的技术人员。
●系统集成商:指自动化设备集成的技术人员。
注意事项
●在安装和调试这些组件时,操作人员必须严格遵循本文档的说明和解释。
●相关负责人员必须确保所述产品的应用或使用满足所有安全要求,包括相关法
律、法规、准则和标准。
●尽管本文档经过精心编制,但由于其中所描述的产品仍处于不断更新换代中,
我们可能不会在每次更新后都检查文档中所描述的产品性能数据、标准或其它
特性总是与实际产品相一致。
●本文档中难免会出现一些技术或者编辑错误,我们保留随时对文档信息做出修
改之权力,恕不另行通知。对于已经变更的产品,如果本文档中的数据、图表
ER系列机器人技术基础
机器人控制系统
开关 电源
电柜背面布局
制动 电阻
保险 丝和 电源 插座
Βιβλιοθήκη Baidu
第四十四页,共78页。
机器人控制系统
5. 示教器的使用说明
埃斯顿机器人配置了T20、T55、T70三种示教器,这三种示教器的功能和界面信息基本一致, 只是操作方式有些差异。下面以T55为例介绍示教器的使用。
示教编程器启动完成界面
第三十页,共78页。
三 机器人控制系统
第三十一页,共78页。
机器人控制系统
机器人控制系统主要包括控制器和示教器。控制器主要完成机器人的运动学与动力学运算,示教器 主要完成机器人的示教与程序编辑。
1. 控制器 控制器作为机器人的运动控制中心,在机器人应用系统中,实现机器人的运动控制以 及外围设备控制,接收示教器指令,发送终端控制信号等。
操作键和按钮。
T20示教器
T55示教器
第三十六页,共78页。
T70示教器
机器人控制系统
4. 电气控制系统 电气控制系统主要包括配电系统、控制系统、安全逻辑及驱动控制。
电气控制系统框图
第三十七页,共78页。
机器人控制系统
4.1 机器人控制及驱动单元
机器人控制单元
第三十八页,共78页。
机器人控制系统
J2轴
后臂
ER5-4B-800(SCARA)机器人
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安全注意事项
ER系列机器人电气维护手册
使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料, 在熟知全部设备知识、安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”、“注意”、“强制”、“禁止”四类分别记载。
误操作时有危险,可能发生死Βιβλιοθήκη Baidu或重伤事故。
误操作时有危险,可能发生中等程度伤害、轻伤事故或物件损坏。
3
ER系列机器人电气维护手册
- 机器人电控柜接通电源时。 - 用示教编程器操作机器人时。 - 试运行时。 - 自动再现时。
不慎进入机器人动作范围内或与机器人发生接触,都有可能引发人身伤害事故。另 外,发生异常时,请立即按下急停键。急停键位于ER16 前门及示教编程器的右侧。
注意
● 进行机器人示教作业前要检查以下事项,有异常则应及时修理或采取其他必要措施。 - 机器人动作有无异常。 - 外部电线遮盖物及外包装有无破损。 ■ 示教编程器用完后须放回原处。
第2章 系统安全
2.1 安全模式 . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. .. . . . . .. . . . 2 2.1.1 安全模式的种类. . . . . . . . . . . . . . . .. .. . . .. .. . . . . .. . . . 2 2.1.2 安全模式的登录.. . . . . . . . . . . . . . . .. .. . . . .. . . . .. .. . . . 2
4.1 确认程序的建立 . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
第5章 更换部件
5.1 控制单元的更换. . . . . . . . . .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5.2 伺服单元的更换. . . . . . . . . .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5.3 电源单元的更换. . . . . . . . . .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .. . . . . . . 5 5.4 保险丝的检查与更换. . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 5 5.5 编码器电池的更换. . . . . .. . .. .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
第6章 零部件更换后的作用内容
6.1 原点位置校准 . . . .. . .. . . . .. . . . . . .. .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6 6.2 使用确认程序确认有无位置偏移 . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
2.2 更改安全模式密码 . . . . . . . . . . . . . ... . . . . .. . . . ... . . . . . .2
第3章 维 护
3.1 日常维护. . . . . . . . . . . . . . . . . . . . . . . . . . .. . . .. . ... . ... . .3 3.2 电控柜的维护. . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . ... . ... . .3
“供电电缆”构成。
在本书中,这些部分如下表表示。
设备
本书表示法
机器人本体
机器人
ER系列机器人控制柜
电控柜
ER系列示教编程器
示教编程器
机器人与控制柜间的电缆
供电电缆
4
ER系列机器人电气维护手册
维护部分
—目 录—
第1章 电控柜的构成
1.1 电源通路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . 1 1.2 信号通路. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . .. . . . . . . . . .1 1.3 控制单元通路 . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . .. .. . . . . . .1 1.4 伺服单元通路. . . . . . . . . . . . .. . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
急停键 ● 解除急停后再接通伺服电源时,要解除造成急停的事故后再接通伺服电源。 由于误操作造成的机器人动作,可能引发人身伤害事故。
急停状态解除 ● 机器人在正常运行过程中拍下急停属于非法操作,会明显减少电机及减速机的使用寿 命,只有在紧急情况下如操作人员遇到潜在的危险等情况下可拍下急停按钮。
● 在机器人动作范围内示教时,请遵守以下事项: - 保持从正面观看机器人。 - 遵守操作步骤。 - 考虑机器人突然向自己所处方位运动时的应变方案。 - 确保设置躲避场所,以防万一。 ■ 由于误操作造成的机器人动作,可能引发人身伤害事故。 ● 进行以下作业时,请确认机器人的动作范围内没人,并且操作者处于安全位置操作:
如不慎将示教编程器放在机器人、夹具或地上,当机器人运动时,示教编程器可能 与机器人或夹具发生碰撞,从而引发人身伤害或设备损坏事故。
● 在理解ER系列机器人使用说明书的“警告标志”的基础上,使用机器人。
本书常用词汇定义
“ESTUN ROBOTICS”是埃斯顿工业机器人的商品名。
ESTUN ROBOTICS 由机器人本体“机器人”、机器人控制柜“电控柜”、“ 示教编程器”和
必须遵守的事项
禁止的事项
即使是属于“注意”类的事项,也会因情况不同而产生严重后果,故任何一条“注意”事项都 极为重要,请务必严格遵守。
虽然不符合“注意”或“危险”的内容,但为了确保安全和有效的操 作,用户也必须遵守的事项,将会在相关处加以叙述。
2
ER系列机器人电气维护手册
危险
● 操作机器人前,按下机器人电控柜前门及示教编程器上的急停键,并确认伺服电源被 切断。伺服紧急情况下,若不能及时制动 机器人,则可能引发人身伤害或设备损坏 事故。
注意 ● 说明书中的图解,有的为了说明细节取下盖子或安全罩进行绘制,运转此类部件时,务必
按规定将盖子或安全罩还原后,再按说明书要求运转。 ● 说明书中的图及照片,为代表性示例,可能与所购买产品不同。 ● 说明书有时由于产品改进、规格变更及说明书自身更便于使用等原因而进行适当的修改。 修改后的说明书将更新封面右下角的资料号,并以修订版发行。 ● 由于破损、丢失等原因需订购说明书时,请与本公司销售部联系,按封面的资料号订购。 ● 客户擅自进行产品改造,不在本公司保修范围之内,本公司概不负责。
第7章 系统诊断
7.1 系统版本. . . . . . .. .. . . . .. . . . .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .7 7.2 输入输出状态. . . . . . .. .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .. . .. . .7 7.3 报警历史. . . . . . .. .. . . . .. . . . .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .7 7.4 当前位置画面. . . . . . .. .. . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .. . .. . .7
第8章 报 警
8.1 报警信息的分类. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 8 8.2 报警信息的显示与清除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 8
3.2.1 检查电控柜门是否关好 . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 3 3.2.2 检查密封构造部分有无缝隙和损害 . . . . . . . . . . . . . . . .. . . . . . . . . .. . . . .. . 3 3.2 冷却风扇的维护 . . . . .. .. . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . .. . . . . ... 3 3.3 急停键的维护 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3.4 安全开关的维护 . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . 3 3.5 电池的维护 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 3 3.6 供电电源电压的确认. . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 3
5
ER系列机器人电气维护手册 3.7 缺相检查 . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . .. . . . . . 3
更换部分
第4章 更换部件前的准备
ER系列机器人电气维护手册
强制 ● 本说明书对 ER系列机器人的示教、再现、程序及文件编辑操作、作业管理等内容进行了
全面的说明。请务必在认真阅读并充分理解的基础上操作机器人。 ● 另外,有关安全的一般事项,在《ER系列机器人使用说明书》的“1 安全”中有详细描述,
阅读本说明书前请务必熟读,以确保正确使用。