法那克fanuc维修手册
发那科机器人控制装置维修说明书

发那科机器人控制装置维修说明书发那科机器人控制装置维修说明书一、产品概述发那科机器人控制装置是一种高精度、高效率的自动化控制设备。
它由计算机控制系统、运动控制系统和机器人执行系统三部分组成,能够实现多轴运动的协调控制,使机器人在工业生产中具有高速度、高精度和稳定性等优点。
二、故障排除1. 无法启动(1)检查电源是否接通,并确认电源线是否正常连接。
(2)检查电源开关是否打开。
(3)检查主板上的指示灯是否亮起,如果不亮,则可能是主板故障。
2. 无法连接网络(1)检查网络线是否插紧,并确认网络线是否正常连接。
(2)检查网络设置是否正确,包括IP地址、子网掩码和网关等信息。
(3)如果以上两项均正常,则可能是网络接口卡故障。
3. 运动系统异常(1)检查电机驱动器是否损坏或未正确连接,如有问题需更换或重新连接。
(2)检查传感器信号是否正常,如有问题需更换或重新安装传感器。
(3)如果以上两项均正常,则可能是运动控制卡故障。
4. 机器人执行系统异常(1)检查机器人执行系统是否损坏或未正确连接,如有问题需更换或重新连接。
(2)检查机器人执行系统的传感器信号是否正常,如有问题需更换或重新安装传感器。
(3)如果以上两项均正常,则可能是机器人控制卡故障。
三、维护保养1. 定期清洁为了保持发那科机器人控制装置的稳定性和可靠性,需要定期对设备进行清洁。
清洁时,应先关闭电源并拔掉电源线,然后用干净的抹布擦拭设备表面和内部部件,避免使用水或化学物品进行清洁。
2. 定期检查为了确保发那科机器人控制装置的正常运行,需要定期对设备进行检查。
检查内容包括电源线、网络线、运动控制卡、机器人控制卡等部件是否正常连接,并对运动系统和执行系统进行测试以确保其正常工作。
3. 定期更换零部件为了延长发那科机器人控制装置的使用寿命,需要定期更换一些易损零部件。
例如:电源线、网络线、传感器等。
在更换零部件时,应注意选择与原件相同的型号和规格,并按照说明书进行安装。
FANUC常见问题解决fanuc发那科维修说明书故障分析解决
FANUC 常见问题解决1、要编辑FS10/11格式程序,必须将设定画面的:FS15 TAPE FORMATE=1?(FANUC 0i-TB)请问FS10/11格式程序什么含义?它有什么特点?如何进行参数设定? 我想了解的详细一点,非常感谢您的回信!操作书中所讲,让我看的满头汗水。
答:18 使用FS10/11 纸带格式的存储器运行概述通过设定参数(No.0001 #1),可执行FS10/11 纸带格式的程序。
说明Oi系列和10/11 系列的刀具半径补偿,子程序调用和固定循环的数据格式是不同的。
10/11系列数据格式可用于存储器运行。
其它数据格式必须遵从Oi 系列。
当指定的数据值超出Oi 系列的规定范围时,出现报警。
对于Oi系列无效的功能不能存储也不能运行。
详细参见B-63844C/01 编程18.使用FS10/11 纸带格式的存储器运行2、关于梯形图(0i-A)梯形图传下来后如何用LADDER--3打开,详细步骤是怎样的答:打开LADDER III, 新建一个文件,PMC类型要和你的实际类型一致,然后再进入"文件"--"导入"(import), 选择"Memory card file" 再选择需要导入的文件名(传下来的梯形图),确定,就可以了。
3、还是老问题(FANUC-0i)专家同志:你好我按您的方法去操作了.在A轴显示正常的那台台中精机上用手动操作A轴,超过360度时,会报警A超程,而在A轴显示不正常的台中精机上手动操作时,即使超过360度,也不会报警,不停的往一个方向摇时,其显示值会累加,当然,反方向摇时会累减.我好困惑.是哪个参数设错了呢?还得请您指导.谢谢4、参数不可改写(BJ-FANUC Oi-MB)最近不知道是怎么回事,我们所用的加工中心,在设置中的参数可写入不能置1了。
请帮我们分析一下是什么原因引起的。
怎样能够修改参数。
FANUC_数控系统维修调整资料fanuc发那科维修说明书 故障分析解决
FANUC_数控系统维修调整资料fanuc发那科维修说明书故障分析解决FANUC 数控系统维修调整资料(WIA日照工厂)2007-2-19说明本资料是根据网络收集的部分资料以及韩国工程技术人员来WIA培训的部分笔记整理而成,主要针对平时工作中能遇到几率高的问题,时间仓促,加上本人的笔记可能不全面,错误在所难免,如果大家发现有错误或遗漏,请及时补正修改,以方便大家工作。
WIA日照工厂所用的数控系统主要是FANUC系列中的0系列、0i系列、POWER MATE 系列和110M,本资料试图将这几个系列的系统的数据备份、恢复、原点调整、ALARM信息以及相关的参数做详细说明,并附录了0系列故障诊断与处理的部分,希望能对大家的工作有所帮助。
FANUC 0TT 原点设置方法WIA日照工厂内WA30-10T采用的就是本类型.下面以两轴系统(X轴Z轴)为例,说明原点调整的方法。
1( MODE选择为HANDLE,将X轴Z轴手动调整好原点(参照系统的原点标志,使之对齐)。
2( MODE选择为MDI ,按DNGOS,直至出现PARAMETER画面,用?下找PWE参数,将其修改为“1”。
3( 按NO.,输入22,按INPUT,屏幕(CRT)显示参数号为21。
的参数,将参数“21”的值全部修改为“0”。
4( 关闭NC电源,5秒后打开,按“运行准备”。
5( 按DNGOS,直至出现PARAMETER画面,按NO.,输入22,按INPUT,屏幕(CRT)显示参数号为21。
的参数,将参数“21”的后3位修改为“101”。
( 修改PWE参数为“0”。
6( 出现ALARM100 ALARM000,关闭NC电源,5秒后再开,系统显7示X轴Z轴坐标为“0.000”,原点调整完毕。
参数说明:FANUC 0MC 原点设置方法此处以3轴系统为例,说明此系统恢复原点的方法。
修改相应参数的方法以及相关参数的含义参照0TT 的修改步骤。
1) 将PWE“0”改为“1”,更改参数NO.76.1=1,NO.22改为00000000,(此时CRT显示“300”报警即X、Y、Z轴必须手动返回参考点。
发那科fanuc维修手册 内部资料
式中伺服电机 转输入脉冲数的设定是可 改变 (例)HC-KFE系列 令0000 pulse/rev的场合 如果设定值是0,可根据连接的伺服电机的 辨率自动的设定这个参数 初始值 令 设定范围 0 令~65535 AL.3以 过流 伺服放大器的输出电流超过了允许电流 < 要原因> <处理方法> ?伺服放大器输出侧②?三?上相存在短路 → 确接线 ?伺服放大器输出侧②?三?上相接地 → 确接线 ?由于外来噪声的干扰,过流检测电路出 错误 →实施抗干扰处理 ?伺服放大器晶体管(IPM)故障 →更换伺服放大器 AL.33 过压 直流母线电压的输入在400三 < 要原因> <处理方法> ?内置的再生 动电阻或再生 动选件的接线断路或接触 良 →更换电线 → 确接线
?伺服放大器和伺服电机之间的配合有误 →使用 确的配合
?参数No.0选择的伺服电机 当前使用的伺服放大器 匹配 → 确设定参数No.0
AL.以0 编码器异常以
编码器和伺服放大器之间通 异常
< 要原因> <处理方法>
?编码器接头CN以没有连接好 → 确接线
?编码器电缆故障(断路或短路) →修理或更换电缆
?伺服放大器内部故障 →更换伺服放大器
AL.以0 编码器异常以
编码器和伺服放大器之间通 异常
< 要原因> <处理方法>
?编码器接头CN以没有连接好 → 确接线
?编码器电缆故障(断路或短路) →修理或更换电缆
?编码器故障 →更换伺服电机
AL.令A 电机配合异常
伺服放大器和伺服电机之间配合有误
< 要原因> <处理方法>
新建文本文档.txt
菱伺服放大器内部故障处理方法
FANUC系统故障处理和参数调整说明书
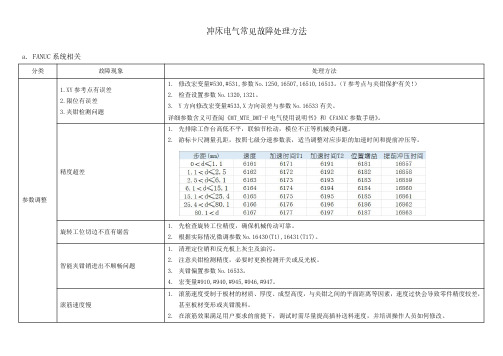
a.FANUC 系统相关分类故障现象处理方法参数调整1.XY 参考点有误差2.限位有误差3.夹钳检测问题1.修改宏变量#530,#531,参数No.1250,16507,16510,16513。
(Y 参考点与夹钳保护有关!)2.检查设置参数No.1320,1321。
3.Y 方向修改宏变量#533,X 方向误差与参数No.16533有关。
详细参数含义可查阅《MT_MTE_DMT-F 电气使用说明书》和《FANUC 参数手册》。
精度超差1.先排除工作台高低不平,联轴节松动,模位不正等机械类问题。
2.游标卡尺测量孔距,按照七级分速参数表,适当调整对应步距的加速时间和提前冲压等。
旋转工位切边不直有锯齿1.先检查旋转工位精度,确保机械传动可靠。
2.根据实际情况微调参数No.16430(T1),16431(T17)。
智能夹钳销进出不顺畅问题1.清理定位销和反光板上灰尘及油污。
2.注意夹钳检测精度,必要时更换检测开关或反光板。
3.夹钳偏置参数No.16533。
4.宏变量#910,#940,#945,#946,#947。
滚筋速度慢 1.滚筋速度受制于板材的材质、厚度、成型高度,与夹钳之间的平面距离等因素,速度过快会导致零件精度较差,甚至板材变形或夹钳脱料。
2.在滚筋效果满足用户要求的前提下,调试时需尽量提高插补送料速度,并培训操作人员如何修改。
冲床电气常见故障处理方法分类故障现象处理方法冲网孔或者长时间加工时X/Y轴电机过热报警1.要求用户编程时X/Y方向运动合理分配。
因为长时间始终沿某方向运动过多,会导致该电机温度高,参见自动编程部分关于模具路径优化的说明。
2.查看客户程序,如某个步距基本固定长期使用的话,可适当增大对应的加速时间以降低峰值电流。
V轴电机声音异常1.在伺服调整界面,适当降低速度环增益。
2.观察冲压过程中编码器是否存在明显晃动。
3.必要时联系江苏金方圆售后服务人员到现场解决。
冲头不在上死点此项不属于机床故障!对于电伺服冲床的V轴,应用FANUC系统RAM轴功能由CNC控制,与应用BECKHOFF系统NC轴由PLC控制的运行模式不同,在加工过程中复位中断,或突然停电而导致冲头停在任意位置,在JOG方式或有报警的时候,冲头不会自动返回上死点。
FANUC_0i-MD维修说明书

4. 伺服放大器和主轴放大器上,即使在断开电源稍过一会之后仍然有残余电 压,触摸这类设备会导致触电。 请在断开电源经过 20 分后再更换放大器。
5. 更换单元时,应使更换前的单元与更换后的单元的设定和参数保持一致。 (详情请参阅该装置的说明书。) 如果不是在相同状态下进行运转,则会因为机床预想不到的动作而损坏工件 和机床,或导致操作者受伤。
B-64305CM/01
为了安全维修
为了安全维修
为了更加安全地维修 CNC 装置附带的机床(以下简称“机床”),本说明书描述 了与 CNC 装置相关的安装注意事项。 CNC 装置的维修作业伴有各种危险,所以这类作业应由充分接受过有关维修和 安全方面培训的人员负责进行。 用户所使用的某些 CNC 装置虽然没有相对应的功能,但已经标上了该项注意事 项,用户在阅读时可以忽略。 有关机床的安全注意事项,请参阅机床制造商提供的说明书。 此外,在维修作业中进行机床的运转确认时,应在充分理解机床制造商和我公司 提供的说明书的基础上进行运转。
件篇))
连接说明书(功能篇) 用户手册(车床系统/加工中心系统通用) 用户手册(车床系统) 用户手册(加工中心系统) 维修说明书 参数说明书 启动说明书
B-64303CM-1 B-64304CM B-64304CM-1 B-64304CM-2 B-64305CM * B-64310CM B-64304CM-3
5. 要确保进给速度与打算进行的操作相适应。一般地讲,每台机床其最大进给 速度受到限制。根据运转内容的不同,最佳速度也不同,请依照机床说明书 执行。 如果机床运转的速度不正确,会给机床带来预想不到的负荷,从而损坏工件 和机床,或导致操作者受伤。
发那科数控系统维修资料3
发那科数控系统维修资料FANUC 0系统的重装及调整方法一、前言数控系统由于机床长时间闲置、电池失效、操作人员操作失误等原因,均会造成数控系统的瘫痪,在此情况下必须对数控系统进行重装和调整。
前不久,我厂从外单位置换回一台台湾大冈工业股份有限公司生产的TNC-20NT数控车床,该数控车床因长期闲置,所用的FANUC0数控系统已经完全瘫痪,机床的数控系统在启动后CRT不能进入FANUC0数控系统正常的工作界面,而显示出一些奇怪的乱码。
为了使机床能早日正常运行,我们通过原机床使用单位从机床购买商处拿到了该类型机床的技术数据参数,对该机床的数控系统进行重装及调整。
其具体方法如下:二、启动数控系统由于数控系统不能正常启动,并在CRT 上显示出乱码,我们判断可能是两种原因引起的。
一是由于机床长期闲置不用,电池耗尽导致程序丢失后的残余参数造成;二是数控系统CNC主板损坏。
区别这两种故障的方法是:在启动机床数控系统的同时按下机床面板上的“RESET”和“DELETE”两个键,若待一会儿后CRT上显示出FANUC公司的版本号,并出现正常画面,则系统CNC主板正常。
反之则系统CNC主板损坏。
同时按下这些键的功能是清除机床的全部参数,即将因机床长期闲置,电池耗尽程序丢失后的残余参数全部清除,以便重新安装系统程序。
注意,这种方法一定要慎用,除非是数控系统死机或不能运行。
否则将使正常工作的整个机床数控系统瘫痪!三、系统密级型功能参数的输入当系统成功启动后,首先应输入FANUC 0系统的密级型功能参数,然后才能输入机床的其它参数,否则数控系统不能工作。
具体方法如下:a、将机床面板上的选择开关拨到MDI方式;b、按下“PARAM”键,使CRT上显示SETTING2画面;c、设定“PWE=1”,同时将机床面板上的EDIT KEY开关打开;d、首先输入901#参数,此时CRT上会出现100#编程报警,用删除键将该报警消除。
然后输入900#~939#FANUC0系统密级型功能参数;e、回到SETTING2画面,将“PWE=1”设定为“PWE=0”,同时将机床面板上的EDIT KEY开关关闭;f、关闭机床电源后,重新启动机床系统,现在就可以输入FANUC 0系统的其它机床参数。
发那科fanuc维修手册-内部资料
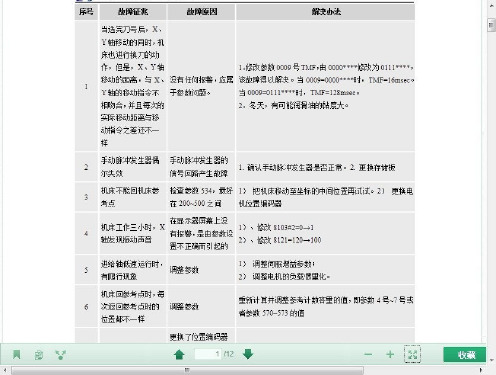
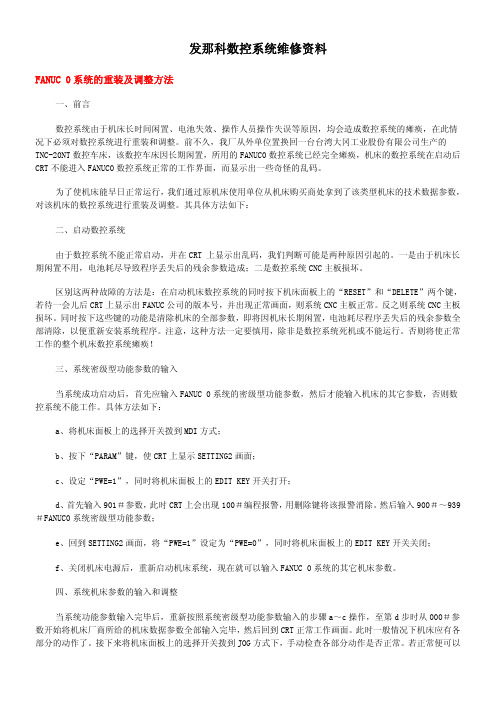
序号故障征兆故障原因解决办法1 当选完刀号后,X、Y轴移动的同时,机床也进行换刀的动作,但是,X、Y轴移动的距离,与X、Y轴的移动指令不相吻合,并且每次的实际移动距离与移动指令之差还不一样没有任何报警,应属于参数问题。
1.修改参数0009号TMF,由0000****修改为0111****,该故障得以解决。
当0009=0000****时,TMF=16msec。
当0009=0111****时,TMF=128msec。
2.冬天,有可能润滑油的黏度大。
2 手动脉冲发生器偶尔失效手动脉冲发生器的信号回路产生故障1. 确认手动脉冲发生器是否正常。
2. 更换存储板3 机床不能回机床参考点检查参数534,最好在200~500之间1)把机床移动至坐标的中间位置再试试。
2)更换电机位置编码器4 机床工作三小时,X轴发现振动声音在显示器屏幕上没有报警,是由参数设置不正确而引起的1)、修改8103#2=0→12)、修改8121=120→1005 进给轴低速运行时,有爬行现象调整参数1)调整伺服增益参数;2)调整电机的负载惯量化。
6 机床回参考点时,每次返回参考点时的位置都不一样调整参数重新计算并调整参考计数容量的值,即参数4号~7号或者参数570~573的值7 切削螺纹时,乱扣更换了位置编码器和主轴伺服放大器及存储板都无效时参数49号设定不对,修改参数49#6由0→1。
8 不能进行螺纹切削位置编码器反馈信号线路1)更换主轴位置编码器;2)修改参数;9 在单脉冲方式下,给机床1μ指令,实际走30μ的距离。
参数问题参数8103设定错误,修改8103#5由1→010 车床:用MX不能输入刀偏量未设参数参数10#7位设111 X、Y轴加工圆度超差没有报警调整参数:1)伺服的增益:要求两轴一致。
2)伺服控制参数:见伺服参数说明书。
3)加反向间隙补偿。
12 轮毂加工车床,当高节奏地加工轮毂时,经常出现电源单元和主轴伺服单元的由于主轴频繁高低速启动更换电源控制单元和主轴伺服控制单元的功率驱动模块。
FANUC 维修说明书

- 请不要拆毁标牌。 标牌脱落时,注意保管。如果不知道电机的规格有可能会无法维护。如果是 内置主轴电机,必须附加在主轴上。
- 请不要让电机受到冲击和损伤。 这样会给电机的零部件带来不利的影响,从而导致电机不能正常运转。另 外,塑料部分、传感器和绕组等部件属于易损件,所以操作的时候需要十分 小心。特别要避免利用塑料部分、绕组和动力线抬起电机。
1.3.1.1 警告 ............................................................................................ s-8 1.3.1.2 注意 ............................................................................................ s-9 1.3.1.3 注释 .......................................................................................... s-10 1.3.2 试运行时的警告及注意................................................................. s-11 1.3.2.1 警告 .......................................................................................... s-11 1.3.2.2 注意 .......................................................................................... s-12 1.3.3 维护时的警告及注意..................................................................... s-13 1.3.3.1 警告 .......................................................................................... s-13 1.3.3.2 注意 .......................................................................................... s-14 1.3.3.3 注释 .......................................................................................... s-14
FANUC维修讲义
型号信息
和伺服报警有关时: ➢电源、伺服、主轴驱动器的型名
SERVO AMPLIFIER MODULE A06B-6114-H208
➢伺服电机的型名
MODEL Am8/4000i Spec A06B-0235-B000
直流感性负载(继电器线圈)加装二极管
系统干扰
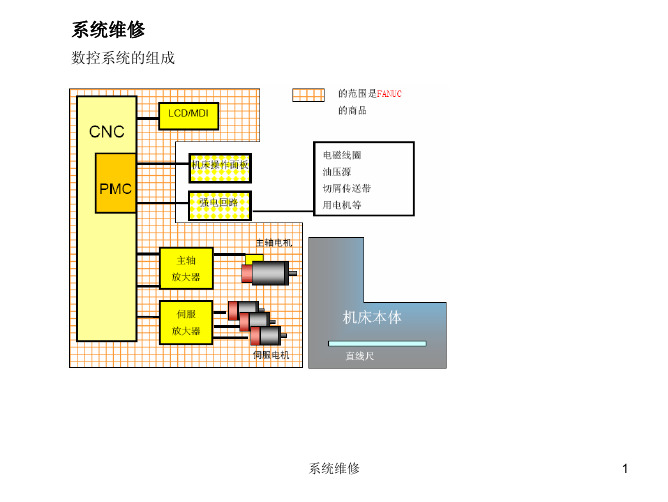
- 信号电缆的屏蔽接地处理 系统的信号线全部采用屏蔽电缆,其接地方法如下图
较长的通讯反馈电缆也可以通过加装磁环,来抵抗干扰。 信号线的屏蔽接地板尽量与电源单元的接地板分离。
以上方法的采用可主动性避免干扰的出现
系统密封
电柜的密封: 电柜的密封对电柜内的CNC系统、放大器和各种电子元器件的可靠运行非常
-放大器的接地
系统干扰
信号地
三相电源输入
信号FG
电源FG
模块金属外壳
大地
电源单元的信号接地点应尽量与电源接地点分开,防止电源的噪音影响系统的运行。
系统干扰
- 电源输入端加装浪涌吸收器和噪音滤波器、隔离变压器等
系统干扰
噪音滤波器 ① 消除电缆的辐射噪音 ② 杂散电容引起的传导噪音 - 交流感性负载(接触器线圈或触点)加装灭弧器
伺服种类 DC伺服电机
AC伺服电机
AC伺服电机 (数字控制)
系统种类
时间段 1996年
1998年
元件 LSI(3维安装)
NC种类 FS-16i系列 FS-18i系列 FS-21i系列 FS-0i系列 FS-15i系列 Power Mete i系列
伺服种类
AC伺服电机 (数字控制)
目前主要的系统类型。 FS-0i-D系列: 高可靠性、高性能价格比的纳米级CNC。 30i系列: 高速、高精度复合型多轴多系统控制的纳米级CNC FANUC Series 30i/31i/32i-MODEL A/B 适应于5轴加工机、复合加工机、多轴多路径的尖端机床
2024版发那科(FANUC)机器人维护保养调试维修

2023REPORTING 发那科(FANUC)机器人维护保养调试维修•机器人概述与基础知识•日常维护与保养操作•故障诊断与调试技巧•维修服务与技术支持体系•培训学习与提升能力途径•总结回顾与展望未来发展趋势目录20232023REPORTINGPART01机器人概述与基础知识发那科(FANUC)机器人简介发那科(FANUC)是全球领先的工业机器人制造商,提供多种型号和规格的机器人产品。
FANUC机器人在工业自动化领域具有广泛应用,包括焊接、装配、搬运、喷涂等。
FANUC机器人以高精度、高速度、高可靠性和易维护等特点著称。
机器人结构组成及工作原理结构组成FANUC机器人主要由机器人本体、控制器、伺服驱动系统和检测传感器等组成。
工作原理机器人通过控制器接收指令,伺服驱动系统驱动机器人本体运动,同时检测传感器实时监测机器人状态,确保机器人按照预定轨迹和精度要求完成任务。
维护保养重要性及周期安排维护保养重要性定期对FANUC机器人进行维护保养可以确保机器人的正常运行,延长使用寿命,提高生产效率。
周期安排根据机器人的使用频率、工作环境和任务复杂度等因素,制定合理的维护保养周期,通常包括日常检查、定期保养和年度大保养等。
2023REPORTINGPART02日常维护与保养操作010204清洁与检查流程定期清洁机器人表面,去除灰尘、油污等杂质,保持外观整洁。
检查各关节、轴承等运动部件的磨损情况,确保正常运转。
清理散热器表面灰尘,确保散热效果良好。
检查电缆、气管等连接部件是否松动或破损,及时紧固或更换。
03根据机器人使用频率和工作环境,定期更换关节润滑油,保证关节灵活运转。
在更换润滑油时,需先将旧油彻底排出,再注入新油至规定油位。
注意使用专用润滑油,避免使用不合适的油品导致关节损坏。
关节润滑油的更换周期一般为每半年或每年一次,具体时间根据机器人使用情况而定。
01020304关节润滑及更换润滑油方法定期检查电气系统各部件的连接情况,确保连接牢固、无松动。
R-J3IB 2006 维修手册(最新中文版)

FANUC > seriesR-J3IB控制器装置 维修说明书B-81465CN/04安全对策安全对策在运用机器人和外围设备及其组合的作业单元时,必须充分研究作业人员和系统的安全对策。
1.1 作业人员的安全在运用自动系统时,首先必须设法确保作业人员的安全。
在运用系统的过程中,进入机器人的操作范围是十分危险的。
应采取防止作业人员进入机器人操作范围的措施。
下面列出一般性的注意事项。
请采取确保作业人员安全的相应措施。
(1) 运用机器人系统的各作业人员,应通过FANUC公司主办的培训课程接受培训。
我公司备有各类培训课程。
详情请向我公司的营业部门查询。
(2) 在运转之中,即使机器人看上去已经停止,也有可能是因为机器人在等待信号而处在即将动作的状态。
即使在这样的状态下,也应该视为机器人处在操作之中。
为了确保作业人员的安全,应当能够以警报灯等的显示或者响声等来告知(作业人员)机器人是否处在操作之中。
(3) 应在系统的周围设置防护栅栏和安全门,使得如果不打开门作业人员就进不去,而当打开门时,机器人就会停下。
控制装置在设计上可以连接此联锁信号。
通过此信号,当安全门打开时,可使机器人紧急停止。
有关连接方法,请参阅图1.1。
(4) 所有外围设备,均应连接上适当的地线(第一类、第二类、第三类)。
(5) 应尽可能将外围设备设置在机器人的操作范围之外。
(6) 应在地板上画上线条等来标清操作范围,使得操作人员弄清包括机器人上配备的机械手等刀具在内的机器人的操作范围。
(7) 应在地板上设置垫片开关或安装上光电开关,以便当作业人员将要进入机器人的操作范围时,通过蜂鸣器和光等发出警报,使机器人停下,由此来确保安全。
(8) 应根据需要,设置一把锁,使得负责操作的作业人员以外者,不能接通机器人的电源。
控制装置中所使用的断路器,可以通过上锁来禁止通电。
(9) 在单个进行外围设备的调试时,务须断开机器人的电源后再执行。
(注释) FENCE1,2露出于操作箱内或操作面板上的 印刷电路板的接线板上。
FANUC数控机床维修教程NEW

FANUC数控机床维修教程NEW 第一章:基本维修知识1.1数控机床的组成和工作原理1.2常见的故障类型及原因1.3维修工具的选择和使用1.4安全操作规程第二章:故障诊断和排除2.1硬件故障的诊断和修复2.1.1主轴故障2.1.2伺服驱动器故障2.1.3伺服电机故障2.1.4控制系统故障2.1.5机械部件故障2.2软件故障的诊断和修复2.2.1程序错误2.2.2内存错误2.2.3接口错误2.2.4显示错误第三章:常见故障及处理方法3.1主轴故障的处理方法3.1.1主轴运转不正常3.1.2主轴过热3.1.3主轴噪音大3.1.4主轴异响3.2伺服驱动器故障的处理方法3.2.1伺服驱动器无法上电3.2.2伺服驱动器报警3.2.3伺服驱动器无法控制伺服电机3.2.4伺服驱动器过热3.3伺服电机故障的处理方法3.3.1伺服电机无法启动3.3.2伺服电机转速不稳定3.3.3伺服电机震动过大3.3.4伺服电机发热3.4控制系统故障的处理方法3.4.1控制系统死机3.4.2控制系统无法运行程序3.4.3控制系统运行程序时出现故障3.4.4控制系统通信故障3.5机械部件故障的处理方法3.5.1导轨故障3.5.2丝杠故障3.5.3机床底座故障3.5.4刀库故障第四章:维护保养4.1日常维护保养的方法和注意事项4.2定期检查和维护保养的内容和周期4.3润滑剂的选择和更换4.4清洁和防尘措施第五章:常见故障案例分析5.1故障案例分析及解决方案5.2故障预防和改进措施第六章:维修记录和报告编写6.1维修记录的重要性6.2维修记录的内容和格式6.3维修报告的编写方法第七章:维修技巧和经验分享7.1维修技巧的总结和分享7.2维修经验的积累和分享以上就是《FANUC数控机床维修教程(内部文件)》的大致目录,内容涵盖了数控机床维修的基本知识、故障诊断和排除、常见故障及处理方法、维护保养、故障案例分析、维修记录和报告编写、维修技巧和经验分享等方面。
FANUC主轴驱动系统维修手册

FANUC主轴驱动系统的简单分类序号名称维修品的特点简介所配系统型号1 直流可控硅主轴伺服单元型号特征为A06B-6041-HXXX 主回路有12个可控硅组成正反两组可逆整流回路,200V三相交流电输入,六路可控硅全波整流,接触器,三只保险。
电流检测器,控制电路板(板号为:A20B-0008-0371~0377)的作用是接受系统的速度指令(0-10V模拟电压)和正反转指令,和电机的速度反馈信号,给主回路提供12路触发脉冲。
报警指示有四个红色二极管显示各自的意义。
配早期系统,如:3,6,5,7,330C,200C,2000C等。
2 交流模拟主轴伺服单元型号特征为A06B-6044-HXXX,主回路有整流桥将三相185V交流电变成300V直流,再由六路大功率晶体管的导通和截止宽度来调整输出到交流主轴电机的电压,以达到调节电机的速度的目的。
还有两路开关晶体管和三个可控硅组成回馈制动电路,有三个保险、接触器、放电二极管,放电电阻等。
控制电路板作用原理与上述基本相同(板号为:A20B-0009-0531~0535或A20B-1000-0070 ~ 0071 )。
报警指示有四个红色二极管分别代表8,4,2,1编码,共组成15个报警号。
较早期系统,如:3,6,7,0A等。
3 交流数字主轴伺服单元型号特征为A06B-6055-HXXX,主回路与交流模拟主轴伺服单元相同,其他结构相似,控制板的作用原理与上述基本相似(板号为A20B-1001-0120),但是所有信号都转换为数字量处理。
有五位的数码管显示电机速度,报警号,可进行参数的显示和设定。
较早期系统,如:3,6,0A,10/11/12,15E,15A,0E,0B等。
4 交流S系列数字主轴伺服单元型号特征为A06B-6059-HXXX,主回路该为印刷板结构,其他元件有螺钉固定在印刷板上,这样便于维修,拆卸较为方便,不会造成接线错误。
以后的主轴伺服单元都是此结构。
FANUC数控系统 维修说明书

前言……………………………………………………………………………………… p-1 1. CRT/MDI 的显示和操作…………………………………………………………... 1 1.1 功能键和软键………………………………………………………………………………. 2 1.1.1 利用功能键进行画面转换………………………………………………… ……………………… 2 1.2 电源接通时的画面显示……………………………………………………………………. 9 1.3 诊断功能……………………………………………………………………………………. 10 1.3.1 如何显示诊断画面………………………………………………………………………….……… 10 1.3.2 CNC 内部状态显示………………………………………………………………………………… 10 1.4 NC 状态显示………………………………………………………………………………… 16 1.5 操作列表……………………………………………………………………………………. 17 1.6 英文键和符号键之间的对照………………………………………………………………. 21 2. 硬件………………………………………………………………………………….. 22 2.1 控制单元……………………………………………………………………………………. 23 2.1.1 控制单元的配置…………………………………………………………………………….……… 23 2.2 总连接图…………………………………………………………………………………….. 24 2.3 机床之间的连接…………………………………………………………………………….. 36 2.3.1 CRT/MDI 单元……………………………………………………………………………………... 36 2.3.2 阅读机/穿孔机接口……………………………………………………………………….………... 47 2.3.3 手摇脉冲发生器……………………………………………………………………………………. 48 2.3.4 I/O 链………………………………………………………………………………………………... 51 2.3.5 伺服接口…………………………………………………………………………….……………… 54 2.3.6 串行主轴接口…………………………………………………………………………….………… 86 2.3.7 模拟主轴接口……………………………………………………………………………….……… 88 2.3.8 位置编码器接口…………………………………………………………………………….……… 89 2.3.9 远程缓冲器接口包括 FANUC DNC2 接口…………………………………………………… 90 2.3.10 电气柜的外部环境要求…………………………………………………………………….……… 95 2.3.11 CNC 和伺服单元的安装条件………………………………………………………………………. 9 6 2.3.12 电源容量……………………………………………………………………………………………. 96 2.3.13 抗干扰对策………………………………………………………………………………….………. 96 2.4 印刷电路板上的 LED 灯……………………………………………………………………. 103 2.5 印刷电路板单元列表……………………………………………………………………….. 104 2.5.1 结构…………………………………………………………………………………………………. 104 2.5.2 构成…………………………………………………………………………………………………. 105 2.6 电池更换方法……………………………………………………………………………….. 112 2.6.1 CNC 存储器备用电池的更换……………………………………………………………………… 112 2.6.2 绝对脉冲编码器……………………………………………………………………………………. 113 2.7 电源单元的详细说明……………………………………………………………………….. 114 2.7.1 电源单元 A(A16B-1211-0850)(A16B-1210-0510)的详细说明………
发那科数控系统维修资料1
2)当xx的第1位为1时,表示在IO单元上检测出错误 相关故障点:yy的第0位~第4位的数值减一是故障的单元的组号。
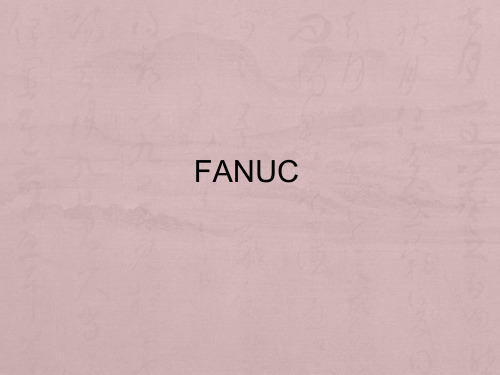
系统维修
27
950 PMC SYSTEM ALARM
PC050IOLINK(CH1)xx:yy-aa:bb
或
(CH2)
PC050IOLINK(CH1)aabb-xxyy:aabb
系统维修
9
系统发生报警时LED的显示(当指示灯点亮时,可能是硬件故障)
报警LED SVALM SEMG
SFAIL SRAMP
LED含义
伺服报警
发生系统报警时点亮 检测出系统内硬件故障 发生系统报警时点亮 软件故障使系统停止时点亮 在执行BOOT中点亮 RAM奇偶校验或ECC报警
系统维修
10
轴卡
显卡
系统维修
6
风扇的更换(风扇不转系统显示ALM701)
无扩展槽和两扩展槽时
三扩展槽和四扩展槽时
系统维修
7
系统接口
SFAIL SVALM SEMG SRAMP
报警 状态
从左至右 JD36A:RS232-C通讯一口 JD36B:RS232-C通讯二口(触摸屏接口) JA40 :模拟主轴/SKIP信号 JD44A:IO LINK通讯口 JA41 :串行主轴/主轴编码器反馈
(观察系统显示的报警信息) ALM951:PMC监控电路异常 处理方法:更换系统母板 ALM972:系统选择功能板异常 处理方法:系统屏幕显示
故障板槽号
引起972报警的原因
ALM974:在系统F-BUS母线上出现异常 处理方法:CPU卡→母板→各扩展板 ALM975;在系统的母板BUS总线上出现异常 处理方法:CPU卡→显卡、轴卡、FROM/SRAM→母板
fanuc机器人设备维护保养手册

Fanuc机器人设备维护保养手册Fanuc机器人设备维护保养手册是一本非常重要的资料,它记录了Fanuc机器人设备的维护和保养方法,对于确保机器人设备的正常运行和延长设备寿命具有至关重要的作用。
在这篇文章中,我将重点讨论Fanuc机器人设备维护保养手册的重要性,并深入探讨其中所包含的内容和方法。
一、Fanuc机器人设备维护保养手册的重要性1.1 保障设备的正常运行Fanuc机器人设备维护保养手册是确保设备正常运行的重要工具。
通过按照手册上的方法进行定期的维护和保养,可以及时发现并解决设备问题,确保设备的运行稳定性和可靠性。
1.2 延长设备的使用寿命定期的维护和保养可以有效地延长设备的使用寿命。
Fanuc机器人设备维护保养手册中记录了设备的维护周期和方法,按照手册进行维护可以最大限度地减少设备的故障和损坏,从而延长设备的使用寿命。
二、Fanuc机器人设备维护保养手册的内容和方法2.1 维护内容Fanuc机器人设备维护保养手册中包含了设备的各个部件的维护内容,包括润滑、清洁、检查、调整等。
在手册中详细记录了每个部件的维护周期和方法,用户可以根据手册进行定期的维护。
2.2 保养方法除了日常的维护工作,手册中还包括了设备的保养方法。
这些方法包括了设备的保养周期、保养材料和保养步骤等,用户可以按照手册进行保养,以确保设备的长期稳定运行。
三、个人观点和理解作为一名Fanuc机器人设备的使用者,我深知设备的正常运行对于生产的重要性。
Fanuc机器人设备维护保养手册为我提供了重要的参考,使我能够及时发现并解决设备问题,确保了生产的正常进行。
在实际使用中,我发现严格依照手册进行维护和保养,确实可以显著减少设备的故障,提高设备的可靠性。
总结和回顾Fanuc机器人设备维护保养手册对于确保设备的正常运行和延长设备寿命至关重要。
手册中包含了设备的维护内容和方法,用户可以依照手册进行定期的维护和保养。
我个人通过实际经验深知手册的重要性,严格按照手册进行维护和保养可以有效地提高设备的可靠性,延长设备的使用寿命。
发那科系统维修与维护FANUC
报警 P/S5523
P/S5524
信息
内容
选择参数或功能包认证 在写入CNC选项或功能包时,
等待状态。
未进行选项认证,处于认证
等待,报警可复位。
选择参数或功能包认证 在写入CNC选项或功能包时, 等待状态(取消期限)。 未进行选项认证且期限已过,
时) ③拆卸主轴编码器与主轴的连接后。
位置调整:
①执行主轴定向,完成后复位退出定向状态,保持主轴自由状态。 ②盘动主轴至要求位置,读取诊断445数值(需先设定No3117#1=1) ③将该值设定至No4077中即可(设定时注意No4033需清零)
第二十一页,共86页。
轴的屏蔽方法
伺服放大器的屏蔽
正常设定
(用户负责MTB控制软件的恢复,发那科负责系统软件的恢复) ③当主板需要更换时,需恢复SRAM中数据
④当系统内部资料被更改而需要恢复时,需SRAM或FROM中MTB软件
第四页,共86页。
数据备份
BOOT画面备份与恢复
③
②
①
进入BOOT画面方式: ①软键最左边两个键
②数字键6+7 ③触摸屏左上角
开机
第八页,共86页。
数据备份
I/O LINK轴的参数数据备份
操作:
→ 【+】 → 【PM管理器】→【系统】 →【参数】 →【操作】
注:备份的文件名后缀为.PMM 。
第九页,共86页。
干扰与抗干扰
干扰的种类 ①电源进线端的浪涌电流。 ②感性负载(继电器、接触器)通断产生的电磁噪音的干扰。
③辐射噪音干扰。
Fanuc控制电机维护手册 B-65165E 73说明书

Fanuc Control Motor Maintenance Manual B–65165E(a)Excessive regenerated powerRegeneration is impossible. The PSM does not have a sufficientcapacity.⇒Check the specification of the PSM.(b)The output impedance of the AC power source is too high.⇒Check the power source output impedance.(c)Regeneration circuit failureCheck whether there is an overvoltage at check terminal IR or IS.⇒Replace the wiring board or control printed circuit board.(d)IGBT (or IPM) defective⇒Replace the IGBT (or IPM).(1)Make sure that the following parameters are set to the standard values. If they are not, abnormal current control is performed.No. 1809No. 1884NO. 1954 (15- A) , 1955 (15- B)No. 2004No. 8X04No. 2006No. 8X06No. 2011No. 8X10No. 1852No. 1853No. 1967No. 1991No. 2040No. 8X40No. 2041No. 8X41No. 2074No. 8X74No. 2098No. 8X98(1)Remove the power line wires from the amplifier terminals, andrelease an emergency stop state.If an abnormal current alarm occurs, go to (4).If not, go to (3).(2)Check for insulation between PE and each of the removed powerwires U, V , and W. If insulation is perfect, go to (4). If not, disconnectthe power wires from the motor connector. Then check for insulationbetween PE and each of the U, V , and W terminals on the motor.⇒If there is a short-circuit between PE and U, V , or W of the motor,replace the motor.⇒If insulation is perfect, replace the power wires.(3)Connect the power wires.Attach the check board(A06B–6071–K290) to connector JX5 to measure the waveform ofthe actual current (IR and IS) in the servo amplifier module.Accelerate or decelerate the motor, and measure the actual current (IRand IS) of the amplifier.3.2SERVO AMPLIFIERMODULETROUBLESHOOTING3.2.1Abnormal CurrentAlarms(8, 9, A, b, C, d, and Ein the LED display)QUESTIONS?A06B-6079-Hxxx A06B-6096-HxxxTROUBLESHOOTING 3.TROUBLESHOOTING AND 3.ACTION B–65165E/01If an abnormal current alarm occurs right after an emergency stop state is released, go to (5).Release an emergency stop state, and start the motor.Check whether the waveform of the actual current (IR and IS) is a normal sine wave.⇒If normal, go to (5).⇒If not, replace the amplifier.(5)Check whether there is noise on the actual current (IR and IS)waveform.⇒If there is no noise, replace the amplifier.⇒If there is noise, use a shielding wire, and ground the shielding,or take other countermeasures as required.(6)If still there is noise, a probable cause is a defective command cableor a hardware failure in the CNC.(1)Wait for about 10 minutes. Then release the emergency stop state.If an IPM alarm still occurs, go to (2).If the cause is IPM overheat, the IPM alarm will not recur. IPM overheat can occur if the ambient temperature is high or the motor is overloaded. Check the operating condition.(2)Remove the power wires from the amplifier terminals, and release an emergency stop state.If the IPM alarm does not recur, go to (3).If the IPM alarm recurs, the probable cause is the operation of the IPM protective function (for overcurrent or power failure). Replace the amplifier and see.⇒If the IPM does not recur, go to (3).(3)Check for insulation between PE and each of the removed power wires U, V , and W. If insulation is perfect, go to (4). If not, disconnect the power wires from the motor connector. Then check for insulation between PE and each of the U, V , and W terminals on the motor.⇒If there is a short–circuit between PE and U, V , or W of the motor,replace the motor.⇒If insulation is perfect, replace the power wires.(4)Connect the power wires.Attach the check board(A06B–6071–K290) to connector JX5 to measure the waveform of the actual current (IR and IS) in the servo amplifier module.Accelerate or decelerate the motor, and measure the actual current (IR and IS) of the amplifier.If an overcurrent alarm occurs right after an emergency stop state is released, go to (5).Release an emergency stop state, and start the motor.Check whether the waveform of the actual current (IR and IS) is a normal sine wave.⇒If normal, go to (5).⇒If not, replace the amplifier.(5)Check whether there is noise on the actual current (IR and IS)waveform.3.2.2IPM Alarms (8., 9., A.,b., C., d., and E in theLED display; notethese codes aredisplayedsimultaneously with aperiod.)TROUBLESHOOTING B–65165E/01 3.TROUBLESHOOTING AND ACTION⇒If there is no noise, replace the amplifier.⇒If there is noise, use a shielding wire, and ground the shielding,or take other countermeasures as required.(6)If still there is noise, a probable cause is a defective command cableor a hardware failure in the CNC.(1)Check the three–phase input voltage to the amplifier.⇒If the voltage is below 0.85 times the rating, adjust it to the rated value.(2)Replace the servo amplifier.(1)Check the three–phase input voltage to the amplifier.⇒If the voltage is below 0.85 times the rating, adjust it to the rated value.(2)Replace the servo amplifier.(1)Make sure that the fan is not clogged up.(2)Check the power line connector of the fan for secure connection.(3)Replace the fan or servo amplifier as required.(1)Exchange the command cable with the cable for the axis on which no alarm has occurred. If the alarm occurs on the same axis, go to (3).If the alarm occurs on the new axis, go to (2).(2)The command cable is defective. Replace it.(3)Exchange the command cables according to the diagram here. Whenswitching the CNC on, do so in an emergency stop state.If the alarm recurs on the same axis, go to (5).If the alarm occurs on the other axis, go to (4).Alarmed axis (L–axis)Normal axis (M axis)L–axisM–axisCommand cable Servo amplifier CNC(4)The servo amplifier is defective.(5)The module for current conversion in the CNC is defective.3.2.3Control Power SupplyUndervoltage Alarm(2 in the LED display)3.2.4DC link UndervoltageAlarm (5 in the LEDdisplay)3.2.5Fan Stopped Alarm(1 in the LED display)3.2.6Current ConversionError Alarm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
序号故障征兆故障原因解决办法1 当选完刀号后,X、Y轴移动的同时,机床也进行换刀的动作,但是,X、Y轴移动的距离,与X、Y轴的移动指令不相吻合,并且每次的实际移动距离与移动指令之差还不一样没有任何报警,应属于参数问题。
1.修改参数0009号TMF,由0000****修改为0111****,该故障得以解决。
当0009=0000****时,TMF=16msec。
当0009=0111****时,TMF=128msec。
2.冬天,有可能润滑油的黏度大。
2 手动脉冲发生器偶尔失效手动脉冲发生器的信号回路产生故障1. 确认手动脉冲发生器是否正常。
2. 更换存储板3 机床不能回机床参考点检查参数534,最好在200~500之间1)把机床移动至坐标的中间位置再试试。
2)更换电机位置编码器4 机床工作三小时,X轴发现振动声音在显示器屏幕上没有报警,是由参数设置不正确而引起的1)、修改8103#2=0→12)、修改8121=120→1005 进给轴低速运行时,有爬行现象调整参数1)调整伺服增益参数;2)调整电机的负载惯量化。
6 机床回参考点时,每次返回参考点时的位置都不一样调整参数重新计算并调整参考计数容量的值,即参数4号~7号或者参数570~573的值7 切削螺纹时,乱扣更换了位置编码器和主轴伺服放大器及存储板都无效时参数49号设定不对,修改参数49#6由0→1。
8 不能进行螺纹切削位置编码器反馈信号线路1)更换主轴位置编码器;2)修改参数;9 在单脉冲方式下,给机床1μ指令,实际走30μ的距离。
参数问题参数8103设定错误,修改8103#5由1→010 车床:用MX不能输入刀偏量未设参数参数10#7位设111 X、Y轴加工圆度超差没有报警调整参数:1)伺服的增益:要求两轴一致。
2)伺服控制参数:见伺服参数说明书。
3)加反向间隙补偿。
12 轮毂加工车床,当高节奏地加工轮毂时,经常出现电源单元和主轴伺服单元的由于主轴频繁高低速启动更换电源控制单元和主轴伺服控制单元的功率驱动模块。
并用A50L-0001-0303替换以前使用的功率模块。
模块严重烧毁13 立式加工中心,按急停,Z轴往下下降2mmZ轴电机的制动器回路处理不妥1)按伺服的说明书,正确地设计Z轴的制动器回路;2)检查参数8X05#6=1、8X83=200左右。
14 加工中心:Z轴运动时产生振动,并且通过交换印刷板实验确认Z轴控制单元及电机正常参数设置而引起的故障1)调整参数517。
2)检查并调整8300至8400之间的参数。
15 X轴加工一段时间后,X轴坐标发生偏移如果更换电机编码器无效,应属机械故障1) 更换电机编码器,无效。
2) 检查并调整丝杆与电机之间的联轴节。
16 主轴低速不稳,而且不能准停反馈信号不好1)检查确认主轴电机反馈信号插头是否松动。
2)更换主轴电机编码器。
3)更换定位用的磁传感器。
17 当使用模拟主轴时,模拟电压没有输出1)主板上是否有87103芯片。
2)检查参数0539~542的数值或者重新计算和设定主轴箱的齿轮比。
3)更换主板。
18 控制系统在运行模拟主轴时,没有模拟电压的输出模拟电压的输出回路有故障或参数有问题1)请确认SSTP*=1,即G120#6=12)设定模拟电压10V时所对应的最高转速成的参数,例如:对于T系列,设定PRM540=60003)在AUTO或MDI方式下,输入S指令,就可以用万用表在M12或M26端口上测量出SVC的输出。
4)如果没有,请更换主板19 机床油泵不能启动,机床换刀时的油缸没有动作输入/输出板输出信号回路有故障1)检查输入/输出板上的元件TD62107是否有明显烧毁痕迹2)更换输入/输出卡或输入/输出卡上的元件TD6210720 电源报警红灯亮,显示器屏幕没有显示外部电源有短路或内部印刷板电源短路1)测量+5V、+15V、+24V及+24E对地的电阻。
2)如果是系统印刷板内部短路造成,可把印刷板外接的信号线插座全部拔下,然后把印刷板一块一块地往下拔,每拔一块后,打开电源,直到发现拔下其中一块印刷板后,就可以通上电,这样可以认为是由该印刷板内部电源短路造成的。
21 系统显示器屏幕上显示NOT READY查诊断G121.4=0,急停回路出现故障1)查电气图中的急停回路;2)查机床各轴的行程开关是否有断线,是否完好;3)把系统的参数,程序等全部清除后,重新输入参数、加工程序等系统数据。
22 在手动或自动方式下机床都不运行1)位置画面显示的数字不变化1)诊断G121.4(*ESP信号)是否等于1;2)诊断G121.7(ERS信号)是否等于0;3)诊断G104.6(RRW信号)是否等于0;4)诊断G122#0,#1、#2的状态。
G122=*****101即JOG状态。
G122=*****001即AUTO状态。
5)到位检查是否在执行,请确认。
DGN800(位置偏差)>PRM500(到位宽度)。
6)检查各个轴互锁信号诊断G128#0~#3(ITX,ITY,ITZ,IT4)是否等于0。
7)检查倍率信号G121#0~#3(*OV1,*OV2,*OV4,*OV8)。
如果PRM03#4 (OVRI)=0,当G121=****1111时,倍率为100%。
8)检查JOG倍率信号G104#0~#3即JOV1、JOV2、JOV4、JOV8当JOV01到JOV8=0000时,其倍率为0%2)显示器屏幕上的位置显示数字在变化检查机床锁住信号,诊断G117#1是否等于0(即MLK 信号)。
23 在手动方式下,机床不能运行显示器屏幕上的位置显示数字不变化1)检查方式选择信号,诊断G122#2、#1、#0是否为101(即MD4、MD2、MD1信号);2)检查进给轴及其轴方向的信号是否已输入系统,G116#3、#2,即-X、+X信号;3)到位检查是否在进行,确认DGN800(位置偏差)>PRM500(到位宽度);4)检查参数PRM517或512、513、514、515,正常状况下,PRM517为3000;5)检查互锁信号是否已起作用;6)检查倍率信号*OV8、*OV4、*OV2、*OV1即诊断G121#3~#0,如果PRM3#4=0时,G121=****1111,其倍率为0%;当PRM3#4=1时G121=****0000,其倍率为100%。
7)检查JOG倍率信号,当诊断G104=****0000其倍率为0%;8)检查JOG进给率的参数设定,即RM559至562;9)对于车床类机床而言,应该确认目前是每分进给还是每转进给当PRM8#4=0时,JOG进给处于每分进给,反之则为每转进给。
24 在自动方式下,机床不能运行1)机床起动的指示灯也不亮(CYCLESTART)1)确认机床运行方式即G122#2~#0(MD4、MD2、MD1)若G122=*****001,即AUTO方式。
若G122=*****000即MDI方式。
2)检查运转起动(ST)信号是否输入,即G120#23)确认进给保持信号(*SP)即G121#5=1;2)机床起动指示灯亮,但不报警1)查诊断700DGN 0700a.700#0 (CFIN):M、S、T 功能正在执行b.700#1(CMTN):自动运行的指令正在执行c.700#2(CDWL):暂停指令正在执行d.700#3(CINP):正在执行到位检查e.700#4(COVZ):倍率为0%f.700#5(CITL):互锁信号输入g.700#6(CSCT):等待主轴速度到位信号DNG701#6:CRST 即急停、外部复位、MDI键盘的复位信号输入;2)检查是否有互锁信号输入;3)检查是否输入了起动互锁信号,即G120#1;4)当PARAM24#2=1时,主轴速度到达信号SAR有效,即当主轴没有到达规定的速度时,机床不能自动运行;5)检查快速进给速度PARAM518~521;6)检查快速进给倍率,这还取决于PRM003#4(OVRI)的设定值。
其中F0=PRM533G116#7(ROV1)G117#7(ROV2)25 在自动运行状态下突然停机有急停外部复位等信号输入1)查诊断712号2)检查G121.4#4(*ESP)急停信号G121#7(ERS)外部复位信号G104#6(RRW)复位倒转信号G121#6(*SP)暂停信号G116#1(SBK)单段执行程序信号26 开机后,约半个小时MDI键盘子上的某些键,如PAGE键,光标键失效操作面板的输入信号不正常1)检查MDI键盘是否正确接地。
2)更换存储板A16B-2201-010*。
27 MDI方式总为G90或G91MDI方式下设定了G90或G91模态在"SETTING"画面设定ABS(其它系统也可这样做。
)28 系统通不上电,并且把系统控制板一块一块地卸掉,发现卸掉存储板后,可以通电由于在通讯中,通讯接口芯片75188,75189的±15V工作电压与0V之间短路所致更换存储板A16B-2201-010*,或A16B-1212-021*,由于更换存储板,当然需要重新输入以下数据:a.系统参数,b.PMC参数c.O9000以后的程序,d.宏变量或P-CODE 等29 机床的操作面板的所有开关都不起作用,即所有输入/输出点不起作用测量输入/输出板的+24D,因为+24D 是输入/输出板上信号接受器的工作电压如果+24D的电压值为OV,或在断电的情况下测量+24D与0V之间的电阻在0至几十欧姆时,请同时更换主板与存储板30 显示器屏幕字符显示不正常显示器屏幕显示回路出现问题1)主板上的字符显示ROM是否装好;2)更换显示器屏幕;3)调整显示器屏幕;4)更换主板。
31 显示器屏幕上字符正常,但在EDIT方式下,不见光标显示器屏幕显示回路出现故障1)清洗主板。
2)更换主板。
32 系统出现死机现象,并且显示器屏幕的画面也不能切换CPU及CPU周边回路,系统软件不能正常工作1)做全清存储器实验,重新输入参数和程序;2)更换主板A20B-2002-065*,或A20B-2000-017*。
33 系统具有图形功能但不能显示图形,有时显示器屏幕上什么都不显示系统的显示回路出现故障1)拆下图形板,把显示器屏幕信号线连到存储板的CCX5上,如果能正常地显示画面,请更换图形板34 系统不能正常上电,且输入/输出板有严重的烧毁痕迹由于外部继电器和外围电压等原因,使输入/输出接口板上的TD62107严重烧毁而造成电源短路1)更换输入/输出板。
2)更换输入/输出板上TD62107。
35 系统工作半个月左右或一个月左右,必须更换电池,不然参数就会丢失电池是为了保障在系统不通电的情况下,不丢失NC数据1)检查确认电池连接电缆是否有破损;2)存储板上的电池保持回路不良,请更换存储板36 机床不能正常工作,机床有PMC-L功能,且PRM60#2=1,但显示器屏幕上不能察看梯形图PMC-L ROM没有被系统选上,即PMC-LROM没起作用1)检查确认PMC-L ROM是否完好;2)更换存储板,因为PMC ROM的片选信号线可能断路。