Robot hand visual tracking using an adaptive
国际自动化与计算杂志.英文版.
国际自动化与计算杂志.英文版.1.Improved Exponential Stability Criteria for Uncertain Neutral System with Nonlinear Parameter PerturbationsFang Qiu,Ban-Tong Cui2.Robust Active Suspension Design Subject to Vehicle Inertial Parameter VariationsHai-Ping Du,Nong Zhang3.Delay-dependent Non-fragile H∞ Filtering for Uncertain Fuzzy Systems Based on Switching Fuzzy Model and Piecewise Lyapunov FunctionZhi-Le Xia,Jun-Min Li,Jiang-Rong Li4.Observer-based Adaptive Iterative Learning Control for Nonlinear Systems with Time-varying DelaysWei-Sheng Chen,Rui-Hong Li,Jing Li5.H∞ Output Feedback Control for Stochastic Systems with Mode-dependent Time-varying Delays and Markovian Jump ParametersXu-Dong Zhao,Qing-Shuang Zeng6.Delay and Its Time-derivative Dependent Robust Stability of Uncertain Neutral Systems with Saturating ActuatorsFatima El Haoussi,El Houssaine Tissir7.Parallel Fuzzy P+Fuzzy I+Fuzzy D Controller:Design and Performance EvaluationVineet Kumar,A.P.Mittal8.Observers for Descriptor Systems with Slope-restricted NonlinearitiesLin-Na Zhou,Chun-Yu Yang,Qing-Ling Zhang9.Parameterized Solution to a Class of Sylvester MatrixEquationsYu-Peng Qiao,Hong-Sheng Qi,Dai-Zhan Cheng10.Indirect Adaptive Fuzzy and Impulsive Control of Nonlinear SystemsHai-Bo Jiang11.Robust Fuzzy Tracking Control for Nonlinear Networked Control Systems with Integral Quadratic ConstraintsZhi-Sheng Chen,Yong He,Min Wu12.A Power-and Coverage-aware Clustering Scheme for Wireless Sensor NetworksLiang Xue,Xin-Ping Guan,Zhi-Xin Liu,Qing-Chao Zheng13.Guaranteed Cost Active Fault-tolerant Control of Networked Control System with Packet Dropout and Transmission DelayXiao-Yuan Luo,Mei-Jie Shang,Cai-Lian Chen,Xin-Ping Guanparison of Two Novel MRAS Based Strategies for Identifying Parameters in Permanent Magnet Synchronous MotorsKan Liu,Qiao Zhang,Zi-Qiang Zhu,Jing Zhang,An-Wen Shen,Paul Stewart15.Modeling and Analysis of Scheduling for Distributed Real-time Embedded SystemsHai-Tao Zhang,Gui-Fang Wu16.Passive Steganalysis Based on Higher Order Image Statistics of Curvelet TransformS.Geetha,Siva S.Sivatha Sindhu,N.Kamaraj17.Movement Invariants-based Algorithm for Medical Image Tilt CorrectionMei-Sen Pan,Jing-Tian Tang,Xiao-Li Yang18.Target Tracking and Obstacle Avoidance for Multi-agent SystemsJing Yan,Xin-Ping Guan,Fu-Xiao Tan19.Automatic Generation of Optimally Rigid Formations Using Decentralized MethodsRui Ren,Yu-Yan Zhang,Xiao-Yuan Luo,Shao-Bao Li20.Semi-blind Adaptive Beamforming for High-throughput Quadrature Amplitude Modulation SystemsSheng Chen,Wang Yao,Lajos Hanzo21.Throughput Analysis of IEEE 802.11 Multirate WLANs with Collision Aware Rate Adaptation AlgorithmDhanasekaran Senthilkumar,A. Krishnan22.Innovative Product Design Based on Customer Requirement Weight Calculation ModelChen-Guang Guo,Yong-Xian Liu,Shou-Ming Hou,Wei Wang23.A Service Composition Approach Based on Sequence Mining for Migrating E-learning Legacy System to SOAZhuo Zhang,Dong-Dai Zhou,Hong-Ji Yang,Shao-Chun Zhong24.Modeling of Agile Intelligent Manufacturing-oriented Production Scheduling SystemZhong-Qi Sheng,Chang-Ping Tang,Ci-Xing Lv25.Estimation of Reliability and Cost Relationship for Architecture-based SoftwareHui Guan,Wei-Ru Chen,Ning Huang,Hong-Ji Yang1.A Computer-aided Design System for Framed-mould in Autoclave ProcessingTian-Guo Jin,Feng-Yang Bi2.Wear State Recognition of Drills Based on K-means Cluster and Radial Basis Function Neural NetworkXu Yang3.The Knee Joint Design and Control of Above-knee Intelligent Bionic Leg Based on Magneto-rheological DamperHua-Long Xie,Ze-Zhong Liang,Fei Li,Li-Xin Guo4.Modeling of Pneumatic Muscle with Shape Memory Alloy and Braided SleeveBin-Rui Wang,Ying-Lian Jin,Dong Wei5.Extended Object Model for Product Configuration DesignZhi-Wei Xu,Ze-Zhong Liang,Zhong-Qi Sheng6.Analysis of Sheet Metal Extrusion Process Using Finite Element MethodXin-Cun Zhuang,Hua Xiang,Zhen Zhao7.Implementation of Enterprises' Interoperation Based on OntologyXiao-Feng Di,Yu-Shun Fan8.Path Planning Approach in Unknown EnvironmentTing-Kai Wang,Quan Dang,Pei-Yuan Pan9.Sliding Mode Variable Structure Control for Visual Servoing SystemFei Li,Hua-Long Xie10.Correlation of Direct Piezoelectric Effect on EAPap under Ambient FactorsLi-Jie Zhao,Chang-Ping Tang,Peng Gong11.XML-based Data Processing in Network Supported Collaborative DesignQi Wang,Zhong-Wei Ren,Zhong-Feng Guo12.Production Management Modelling Based on MASLi He,Zheng-Hao Wang,Ke-Long Zhang13.Experimental Tests of Autonomous Ground Vehicles with PreviewCunjia Liu,Wen-Hua Chen,John Andrews14.Modelling and Remote Control of an ExcavatorYang Liu,Mohammad Shahidul Hasan,Hong-Nian Yu15.TOPSIS with Belief Structure for Group Belief Multiple Criteria Decision MakingJiang Jiang,Ying-Wu Chen,Da-Wei Tang,Yu-Wang Chen16.Video Analysis Based on Volumetric Event DetectionJing Wang,Zhi-Jie Xu17.Improving Decision Tree Performance by Exception HandlingAppavu Alias Balamurugan Subramanian,S.Pramala,B.Rajalakshmi,Ramasamy Rajaram18.Robustness Analysis of Discrete-time Indirect Model Reference Adaptive Control with Normalized Adaptive LawsQing-Zheng Gao,Xue-Jun Xie19.A Novel Lifecycle Model for Web-based Application Development in Small and Medium EnterprisesWei Huang,Ru Li,Carsten Maple,Hong-Ji Yang,David Foskett,Vince Cleaver20.Design of a Two-dimensional Recursive Filter Using the Bees AlgorithmD. T. Pham,Ebubekir Ko(c)21.Designing Genetic Regulatory Networks Using Fuzzy Petri Nets ApproachRaed I. Hamed,Syed I. Ahson,Rafat Parveen1.State of the Art and Emerging Trends in Operations and Maintenance of Offshore Oil and Gas Production Facilities: Some Experiences and ObservationsJayantha P.Liyanage2.Statistical Safety Analysis of Maintenance Management Process of Excavator UnitsLjubisa Papic,Milorad Pantelic,Joseph Aronov,Ajit Kumar Verma3.Improving Energy and Power Efficiency Using NComputing and Approaches for Predicting Reliability of Complex Computing SystemsHoang Pham,Hoang Pham Jr.4.Running Temperature and Mechanical Stability of Grease as Maintenance Parameters of Railway BearingsJan Lundberg,Aditya Parida,Peter S(o)derholm5.Subsea Maintenance Service Delivery: Mapping Factors Influencing Scheduled Service DurationEfosa Emmanuel Uyiomendo,Tore Markeset6.A Systemic Approach to Integrated E-maintenance of Large Engineering PlantsAjit Kumar Verma,A.Srividya,P.G.Ramesh7.Authentication and Access Control in RFID Based Logistics-customs Clearance Service PlatformHui-Fang Deng,Wen Deng,Han Li,Hong-Ji Yang8.Evolutionary Trajectory Planning for an Industrial RobotR.Saravanan,S.Ramabalan,C.Balamurugan,A.Subash9.Improved Exponential Stability Criteria for Recurrent Neural Networks with Time-varying Discrete and Distributed DelaysYuan-Yuan Wu,Tao Li,Yu-Qiang Wu10.An Improved Approach to Delay-dependent Robust Stabilization for Uncertain Singular Time-delay SystemsXin Sun,Qing-Ling Zhang,Chun-Yu Yang,Zhan Su,Yong-Yun Shao11.Robust Stability of Nonlinear Plants with a Non-symmetric Prandtl-Ishlinskii Hysteresis ModelChang-An Jiang,Ming-Cong Deng,Akira Inoue12.Stability Analysis of Discrete-time Systems with Additive Time-varying DelaysXian-Ming Tang,Jin-Shou Yu13.Delay-dependent Stability Analysis for Markovian Jump Systems with Interval Time-varying-delaysXu-Dong Zhao,Qing-Shuang Zeng14.H∞ Synchronization of Chaotic Systems via Delayed Feedback ControlLi Sheng,Hui-Zhong Yang15.Adaptive Fuzzy Observer Backstepping Control for a Class of Uncertain Nonlinear Systems with Unknown Time-delayShao-Cheng Tong,Ning Sheng16.Simulation-based Optimal Design of α-β-γ-δ FilterChun-Mu Wu,Paul P.Lin,Zhen-Yu Han,Shu-Rong Li17.Independent Cycle Time Assignment for Min-max SystemsWen-De Chen,Yue-Gang Tao,Hong-Nian Yu1.An Assessment Tool for Land Reuse with Artificial Intelligence MethodDieter D. Genske,Dongbin Huang,Ariane Ruff2.Interpolation of Images Using Discrete Wavelet Transform to Simulate Image Resizing as in Human VisionRohini S. Asamwar,Kishor M. Bhurchandi,Abhay S. Gandhi3.Watermarking of Digital Images in Frequency DomainSami E. I. Baba,Lala Z. Krikor,Thawar Arif,Zyad Shaaban4.An Effective Image Retrieval Mechanism Using Family-based Spatial Consistency Filtration with Object RegionJing Sun,Ying-Jie Xing5.Robust Object Tracking under Appearance Change ConditionsQi-Cong Wang,Yuan-Hao Gong,Chen-Hui Yang,Cui-Hua Li6.A Visual Attention Model for Robot Object TrackingJin-Kui Chu,Rong-Hua Li,Qing-Ying Li,Hong-Qing Wang7.SVM-based Identification and Un-calibrated Visual Servoing for Micro-manipulationXin-Han Huang,Xiang-Jin Zeng,Min Wang8.Action Control of Soccer Robots Based on Simulated Human IntelligenceTie-Jun Li,Gui-Qiang Chen,Gui-Fang Shao9.Emotional Gait Generation for a Humanoid RobotLun Xie,Zhi-Liang Wang,Wei Wang,Guo-Chen Yu10.Cultural Algorithm for Minimization of Binary Decision Diagram and Its Application in Crosstalk Fault DetectionZhong-Liang Pan,Ling Chen,Guang-Zhao Zhang11.A Novel Fuzzy Direct Torque Control System for Three-level Inverter-fed Induction MachineShu-Xi Liu,Ming-Yu Wang,Yu-Guang Chen,Shan Li12.Statistic Learning-based Defect Detection for Twill FabricsLi-Wei Han,De Xu13.Nonsaturation Throughput Enhancement of IEEE 802.11b Distributed Coordination Function for Heterogeneous Traffic under Noisy EnvironmentDhanasekaran Senthilkumar,A. Krishnan14.Structure and Dynamics of Artificial Regulatory Networks Evolved by Segmental Duplication and Divergence ModelXiang-Hong Lin,Tian-Wen Zhang15.Random Fuzzy Chance-constrained Programming Based on Adaptive Chaos Quantum Honey Bee Algorithm and Robustness AnalysisHan Xue,Xun Li,Hong-Xu Ma16.A Bit-level Text Compression Scheme Based on the ACW AlgorithmHussein A1-Bahadili,Shakir M. Hussain17.A Note on an Economic Lot-sizing Problem with Perishable Inventory and Economies of Scale Costs:Approximation Solutions and Worst Case AnalysisQing-Guo Bai,Yu-Zhong Zhang,Guang-Long Dong1.Virtual Reality: A State-of-the-Art SurveyNing-Ning Zhou,Yu-Long Deng2.Real-time Virtual Environment Signal Extraction and DenoisingUsing Programmable Graphics HardwareYang Su,Zhi-Jie Xu,Xiang-Qian Jiang3.Effective Virtual Reality Based Building Navigation Using Dynamic Loading and Path OptimizationQing-Jin Peng,Xiu-Mei Kang,Ting-Ting Zhao4.The Skin Deformation of a 3D Virtual HumanXiao-Jing Zhou,Zheng-Xu Zhao5.Technology for Simulating Crowd Evacuation BehaviorsWen-Hu Qin,Guo-Hui Su,Xiao-Na Li6.Research on Modelling Digital Paper-cut PreservationXiao-Fen Wang,Ying-Rui Liu,Wen-Sheng Zhang7.On Problems of Multicomponent System Maintenance ModellingTomasz Nowakowski,Sylwia Werbinka8.Soft Sensing Modelling Based on Optimal Selection of Secondary Variables and Its ApplicationQi Li,Cheng Shao9.Adaptive Fuzzy Dynamic Surface Control for Uncertain Nonlinear SystemsXiao-Yuan Luo,Zhi-Hao Zhu,Xin-Ping Guan10.Output Feedback for Stochastic Nonlinear Systems with Unmeasurable Inverse DynamicsXin Yu,Na Duan11.Kalman Filtering with Partial Markovian Packet LossesBao-Feng Wang,Ge Guo12.A Modified Projection Method for Linear FeasibilityProblemsYi-Ju Wang,Hong-Yu Zhang13.A Neuro-genetic Based Short-term Forecasting Framework for Network Intrusion Prediction SystemSiva S. Sivatha Sindhu,S. Geetha,M. Marikannan,A. Kannan14.New Delay-dependent Global Asymptotic Stability Condition for Hopfield Neural Networks with Time-varying DelaysGuang-Deng Zong,Jia Liu hHTTp://15.Crosscumulants Based Approaches for the Structure Identification of Volterra ModelsHouda Mathlouthi,Kamel Abederrahim,Faouzi Msahli,Gerard Favier1.Coalition Formation in Weighted Simple-majority Games under Proportional Payoff Allocation RulesZhi-Gang Cao,Xiao-Guang Yang2.Stability Analysis for Recurrent Neural Networks with Time-varying DelayYuan-Yuan Wu,Yu-Qiang Wu3.A New Type of Solution Method for the Generalized Linear Complementarity Problem over a Polyhedral ConeHong-Chun Sun,Yan-Liang Dong4.An Improved Control Algorithm for High-order Nonlinear Systems with Unmodelled DynamicsNa Duan,Fu-Nian Hu,Xin Yu5.Controller Design of High Order Nonholonomic System with Nonlinear DriftsXiu-Yun Zheng,Yu-Qiang Wu6.Directional Filter for SAR Images Based on NonsubsampledContourlet Transform and Immune Clonal SelectionXiao-Hui Yang,Li-Cheng Jiao,Deng-Feng Li7.Text Extraction and Enhancement of Binary Images Using Cellular AutomataG. Sahoo,Tapas Kumar,B.L. Rains,C.M. Bhatia8.GH2 Control for Uncertain Discrete-time-delay Fuzzy Systems Based on a Switching Fuzzy Model and Piecewise Lyapunov FunctionZhi-Le Xia,Jun-Min Li9.A New Energy Optimal Control Scheme for a Separately Excited DC Motor Based Incremental Motion DriveMilan A.Sheta,Vivek Agarwal,Paluri S.V.Nataraj10.Nonlinear Backstepping Ship Course ControllerAnna Witkowska,Roman Smierzchalski11.A New Method of Embedded Fourth Order with Four Stages to Study Raster CNN SimulationR. Ponalagusamy,S. Senthilkumar12.A Minimum-energy Path-preserving Topology Control Algorithm for Wireless Sensor NetworksJin-Zhao Lin,Xian Zhou,Yun Li13.Synchronization and Exponential Estimates of Complex Networks with Mixed Time-varying Coupling DelaysYang Dai,YunZe Cai,Xiao-Ming Xu14.Step-coordination Algorithm of Traffic Control Based on Multi-agent SystemHai-Tao Zhang,Fang Yu,Wen Li15.A Research of the Employment Problem on Common Job-seekersand GraduatesBai-Da Qu。
【美联英语】双语阅读:日本公司发明炫酷机械臂,你现在有四只手了

小编给你一个美联英语官方免费试听课申请链接:/test/waijiao.aspx?tid=16-73675-0美联英语提供:日本公司发明炫酷机械臂,你现在有四只手了If you’ve ever stared enviously at an ant, jealous of its six-legged efficiency, then you’ll be happy to hear that engineers at Japan’s Inami Hiyama Laboratory have developed a multi-limbed robotic suit –able to give users control over two extra arms.如果你曾羡慕地盯着一只蚂蚁,嫉妒它六条腿的效率,那么你会很高兴听到这则消息,日本稲見・檜山研究所的工程师开发了一套多臂机械套装,可以使用户控制另外两条手臂。
The MetaLimbs system is built up of two main parts: The first is a set of robotic limbs that rest on the wearer like a tech-heavy backpack. The second is a tracking system attached to the wearer’s legs.金属壁系统由两个主要部分构成:第一部分是一套机械臂,它就像一个高科技的双肩背包一样背在佩戴者身上。
第二部分是一个附着在佩戴者腿上的追踪系统。
Optical markers are attached to toes and knees. When the wearer moves their leg, so does the accompanying robotic arm. When they squeeze their toes, the robot hand tightens its grip.光学指示器附着在脚趾和膝盖上。
视觉相机机器人指引原理

视觉相机机器人指引原理Visual camera robot guidance is a technology that utilizes cameras to interpret and navigate the surrounding environment. It involves the use of computer vision algorithms to process visual data and make decisions based on the information received. This technology has become increasingly popular in various industries, including autonomous vehicles, robotics, and surveillance systems.视觉相机机器人导航是一种利用摄像头来解释和导航周围环境的技术。
它涉及使用计算机视觉算法来处理视觉数据,并根据接收到的信息做出决策。
这项技术在各个行业中越来越受欢迎,包括自主车辆、机器人和监视系统。
One of the key principles behind visual camera robot guidance is image processing. By analyzing the visual data captured by the camera, the robot can extract relevant information about its surroundings, such as obstacles, landmarks, and navigational cues. This information is then used to generate a map of the environment and plan a path to reach a designated destination.视觉相机机器人导航背后的一个关键原理是图像处理。
【doc】仿人灵巧手关节的位置/力矩控制
仿人灵巧手关节的位置/力矩控制第7卷第2期2003年6月电机与控制ELECTRICMACHINESANDCONTROLVO1.7No.2June,2003仿人灵巧手关节的位置/力矩控制姜力,刘宏,蔡鹤皋(哈尔滨工业大学机器人研究所,黑龙江哈尔滨15(1001)摘要:为了使仿人灵巧手完成各种精细作业,提出了一种新的关节位置/力矩控制方法.在自由空间和约束空间中分别采用滑模位置控制和具有前馈的PD力矩控制,在过渡过程中使用系统观测器切换控制模式.这种方法可以使关节在自由空间和约束空间中分别实现良好的轨迹跟踪和力矩跟踪,在过渡过程中实现控制模式的可靠切换和系统的稳定过渡.实验证明了该方法的有效性.关键词:位置控制;力矩控制;滑模控制;灵巧手中圈分类号:1?244文献标识码:A文章编号:1007-449X(2003)02—0151—06 Position/torquecontrolforjointofhumanoiddextroushandJIANGLi,LIUHong,CAIHe—gao(HarbinInstituteofTechnology,RobotResearchInstitute,Harbin150001,China) Abstract:Inthispaper,anewjointposition/torquecontrolstrategyisproposedinorderto completevariousfinemanipulationsbyusingdextroushand.Slidingmodepositioncontrol andPDtorquecontrolwithfeedforwardareusedinfreeandconstrainedspace,respectively. Systemobserverisadoptedintransitioninordertoswitchcontrolmode.Trajectorytrackinginfreespaceandtorquetrackinginconstrainedspacearerealized,andreliabilityofmode switchandstabilityofsystemareachievedintransition.Experimentalresultsverifiesthe effectivenessofthismethod.Keywords:positioncontrol;torquecontrol;slidingmodecontrol;dextrousrobothand1引言作为机器人与环境相互作用的最后环节和执行部件,末端执行器对于机器人智能化水平和作业水平的提高具有重要的意义,多自由度多关节的仿人机器人灵巧手成为新一代智能机器人研究的重点领域,世界上有很多着名的灵巧手问世,如2O世纪8O年代美国的Utah/M1T手和Stanford/WE手,9o年代德国的DLR手和美国的NASA-JsC手等_...为了使灵巧手可靠而稳定地抓握物体并且进行灵巧操作,灵巧手具有一定的柔顺性,即对外界环境具有顺应能力.目前,阻抗控制是主动柔顺控制的一种主要方法,其优点是把力控制和位置控制纳入统一的框架中,设计简单,任务规划量小,但是难于实现精确的力跟踪.为了解决阻抗控制的力跟踪问题,学者们提出了包括自适应控制在内的许多方法【6~,但是算法复杂,执行时间较长,应用效果并不理想.为此,本文以Hrr仿人灵巧手关节为对象,研究了一种新的位置/力矩控制方法,目标是:关节在自由空间中精确地跟踪期望轨迹,在约束空间中稳定地与环境接触并且跟踪期望力矩,能够实现自由空间到约束空间和约束空间到自由运动的稳定过渡.收稿日期:2002--09-01基金项目:圈零863计划(863—512—9924-03)和黑龙江省杰出青年科学基金资助项目.作者简介:姜力(1970-),男,博士后,研究方向为机器人及灵巧手的传感,驱动和控制: 刘宏(1966一),男,.长江学者奖励计划特聘教授,博士生导师,研究方向为仿人机嚣人灵巧手,机嚣人宏/截操作嚣;蔡捣奉(1934一),男.中啊工翟院院士,研究方向为机电一体化技术,机器人学.152电机与控制第7卷本文首先简要介绍HIT灵巧手并建立关节的传递函数和状态空间数学模型,然后分位置控制,力矩控制和系统观测器三部分研究关节的位置/力矩控制方法,最后通过实验验证该控制策略的有效性.2肼手关节的数学模型具有多种感知功能的仿人灵巧手一HIT手由4个完全相同的手指组成,大拇指与其他3个手指相对放置,每个手指有4个关节,末端的两个关节存在着机械耦合.HIT手采用微型直线驱动器和腱相结合的方式进行手指的驱动,l2个直线驱动器均放置在手掌中,从而实现了驱动系统和机械本体的集成,减小了灵巧手的体积,改善了系统的性能.HIT手具有关节力矩,指尖力,力矩,温度和位置等96个传感器,共600多个机械零件,1600多个表面贴装电子元件,是一个集机构设计,微型传感器,驱动及智能控制为一体的高度集成化机电系统,如图l所示.末端的两个关节通过腱一滑轮一弹簧机构实现运动的耦合,传动比是l:l.在手指中有关节力矩传感器用来检测关节所受的力矩;在手指的末端放置微型的五维力,力矩传感器,用来检测手指尖和被抓握物体的接触力和力矩,为柔顺控制提供力感信息.关节的驱动系统包括微型直线驱动器和腱传动两部分,微型直线驱动器是驱动系统的核心.该驱动器将微型无刷直流电机(BLDCM,BrushlessDCMo. tor),旋转一直线转换机构和减速机构融为一体,具有直线位置检测,电机位置检澍和光电式极限位置检测等多种感知功能,是一种光机电一体化的集成式微型直线驱动器,又称.人工肌肉(ti6cMus. de).根据BUX=M的动力学特性,关节的动力学特性如方程(1)~(5)所示.其参数的含义为:R为电枢电阻;,I为减速比;L为电枢电感;wM为PWM常数;KT为力矩常数;为电枢电压;K为反电动势系数;f为电枢电流;J为转动惯量;为电磁转矩;B为阻尼系数;T为接触力矩;为电机位置;为重力矩;0为关节位置;为摩擦力矩.电压平衡方程为u.=Ri+L軎+P(1)反电动势P=Ke百dOm(2)电磁转矩=K4(3)转矩方程图1FlIT手.1TheFlIThandHIT手的手指结构如图2所示.图2中,利用弹减速比簧,套管和腱传动由直线驱动器对中指节进行驱动, 图2HIT手的手指结构№2喀盯structure0ftheHIThand睾=.,dr"+Bdt+++丁,I'',1—使用PWM方式调节从而实现关节的位置控制,忽略驱动电路的延时,其传递函数为GPWM(s)=—≈七PwM(6)根据上述方程,单关节的传递函数为㈣=器=(,IKPwMKT)u.(一,I(Ls+R)(Tgs)-k(s)+7)),',(n'JL)s+n2(JR+BL)s+(n2BR+KKT)s设(f)=和D(t)=卯分别为关节的期望轨迹向量和实际轨迹向量,其中,,Od第2期仿人灵巧手关节的位置,力矩控制153分别为关节的期望位置,速度和加速度;0,百,分别为关节的实际位置,速度和加速度.定义误差向量为r)=(r)一D(r)=【e.e2P3】(8)[妻]=[三1.三][圣]一[呈]+[呈.]c+++0]Ud=d30d+(号+)+n2BR+KeKrdOd.,l儿dt'一百n2BR+K,Kr._一(争+):^?一一———_—一'^:一\丁._/' 等;A4-R.3关节的位置,力矩控制本文提出的关节位置/力矩控制策略的原理是:当关节在自由空间中运动时,采用滑模位置控制使关节跟踪期望轨迹:当关节在约束空间中运动时,采用前馈的PD力矩控制使手指与环境稳定接触并且跟踪期望力矩:当关节从自由运动向接触运动过渡或从接触运动向自由运动过渡时,采用系统观测器完成控制模式的切换和系统的稳定过渡.3.1关节位置控制系统的设计关节位置控制系统包括滑模位置控制器和轨迹插补两部分.3.1.1关节的滑模位置控制l9l滑模位置控制器的设计由两部分组成:选择切换函数,使系统的滑动模态渐近稳定并且具有期望的动态品质:求解控制函数uc(e),使滑模的存在条件和到达条件得以满足.1)切换函数s(层)的选择采用线性切换函数=D(9)式中:C=【clc2】;z(t)=【ele2P3】.取=l,不失一般性.滑模运动方程为+c2+ctel=0(10)特征方程为p+c2P+cl0(11)为了使系统渐近稳定,则c.>0,c2>0:为了使系统无超调,则c~>/4cI.2)控制函数")的选择所采用的控制函数为"clel+2e2+6sgn(s)(12)式中:.和分别是el和的反馈增益;为一个小的正数,它可以保证原点处(el===0)满足滑模的存在条件,同时提高系统的抗干扰能力,消除静态误差.根据广义滑模条件可以得到s=(cl+c2+亩=(一clc2一ctA2一A31)s+(cl+A2一一c22一A32)P2s+(c2+A2)s+【A4(丁++rf)+Is—A36sgn(s)s<0于是.f1,ets>0l.<0.f2.e2s>02{,<o~2<--号+叶l这里,x(一)≤n(一),x(),n()?由于采用PWM方式驱动关节,所以在控制系统中引入饱和函数(如图3所示),即f",luI≤lU=sat(u)={1,">1(13)【一1,"<一13.1.2关节的轨迹插补为了使灵巧手关节平滑地运动,在位置控制系统中对路径上给定的参考位置点r进行轨迹插补,使轨迹上所有点的位置,速度和加速度连续.本文采用带有过渡域的插补算法,原理如图4所示m1.在过渡域中采用4次多项式描述关节的位置,0,d和0的表达式为[(△c鲁+△B)c2h~-2AB]h+B+ABc?4=[(△c鲁+△B(1.5-h)2△-1亡(15)l54电机与控制第7卷图3关节的位置,力矩控髑系统Fig.3Position/torquecontrolsystemofthejoint:AC导+AB)(1一Ih)下3h(16)大时,有利于增强系统的稳定性和减小力超调?为了.\』t/r克服力矩传感器输出信号的噪声对于控制系统性能式(14)~(16)和图4中,C和D是运动路径上的的影响,在反馈环中以关节速度代替力矩的直接微关节参考位置;是加速时间,在k内关节可以从分.当AT=0时,前馈项提供的偏置力矩可以减静止加速到最大速度;和分别是轨迹段BC和CD小系统的稳态误差并且提高系统的抗干扰能力.的时间;AC=C-=A-B,h=速运鐾或脱离接需要利用系动段,:ACh,+:AC,:o'其中,Ih,,/T,.统观测器进行控制模式的切换?有关变量的说明如图4关节的轨迹插补原理Fig.4Principleoftrajectoryinterpolation3.2关节力矩控制系统的设计关节力矩控制的目标是:使关节成为一个独立于位置的纯力矩源,能够根据作业要求输出期望的力矩.PID控制以其算法的有效性和简易性在机器人力控制领域占据着主导地位.本文采用PD控制和前馈补偿相结合的方法设计关节力矩控制系统.控制函数"的表达式为,|日".△丁一KD++(17)式中:和丁分别为关节的期望力矩和实际力矩,AT=—T表示关节力矩误差;0为关节的实际位置;KP和KD分别为力矩控制器的比例系数和微分系数;".为控制器的输出;为关节所受的重力矩. 在控制算法中,引入速度反馈项是为了增加系统的阻尼,改善力控制系统的性能,特别是当阻尼增1)任务变量Task:GRAsP表示抓握,REI恩ASE表示放开.2)系统状态变量State:FREE表示关节处于自由空间,CoNrACT表示处于约束空间.3)控制模式变量Mode:POS_CTRL和FORCE—CTRL分别表示位置控制和力矩控制.4)力矩阈值变量TI.系统观测算法如图5所示.变量初始化:State=FREEmode--POS—CTRL令NNYlYIState=FREEState=CoNTACTState.o0NTACT mode=POS—CTRLmode=POS..CTRL.mode暑F0RCE—CTRL1'LI位置薯嗣器lL二二二图5系统观测器的算法Fig.5AlgorithmofS~qlttObs圈—er3.4关节保护系统3.4.1位置保护在运动和抓取过程中,为了使关节不超过自身的运动范围,进行位置保护是十分必要的.在埘T灵第2期仿人灵巧手关节的位置/力矩控制155巧手中,采用硬件和软件两种方式实现关节的位置保护.在微直线驱动器中使用电位计检测其直线位置,使用光电开关检测其极限位置.当驱动器到达设定的极限位置时,将产生极限位置信号.逻辑电路输出的刹车命令使驱动器停止运动,从而实现关节的硬件保护.在控制算法软件中首先判断关节的参考位置or和实际位置0是否在设定的关节运动范围之内,同时结合驱动器的运动方向,确定是否输出刹车信号,从而实现关节的软件保护.3.4.2力矩保护在抓握和操作物体时,为了避免手指与物体的接触力过大或手指之间相互碰撞而损坏灵巧手的机械件,传感器和驱动器,在进行位置保护的同时必须采取力矩保护措施.本文根据具体的作业任务设定关节力矩的允许范围,在保护系统中判断关节力矩是否在该范围之内,同时结合驱动器的运动状态确定是否输出"刹车信号,从而实现手指的力矩保护.4实验4.1控制系统硬件本文基于DSl103控制板建立HIT手的关节位置/力矩控制系统.DSl103板上的主处理器是摩托罗拉公司的PowerPC604e,辅处理器是德州仪器公司生产的数字信号处理器TMS32OF24o.该控制板还提供了A/O,D/A,I/O,PWM,RS232和RS422等多种功能模块.本文应用DSl103板上的l6位A,D转换模块采集电位计式直线位置传感器和两路霍尔传感器的输出信号,利用PWM模块输出电机的PWM驱动信号,利用BITI/O模块向驱动电路输出方向信号和刹车信号.本文采用直线电位计信号计算关节的角度,采用霍尔传感器信号计算关节的速度和加速度,利用关节力矩传感器感知手指在约束空间所受到的力矩.4.2控制实验4.2.1位置控制对关节的动力学模型参数进行测量和最dx--乘估计,结果为:R=5.7Q,L=0.44mH,KT=7.4×10(N?m)/A,K.=7.5×10一V/(rad?S一'),-,=7.7×lOkg?m2,B=5.2×10(N?m)/(rad?S),,I=1/2l8,KPwM=22.根据关节参数和3.1.1节给出的滑模控制参数计算公式,通过仿真和实验反复调整,最后确定滑模控制器的参数为cl9000,200,c3l;=0.03,rel=l3,卢l=8,re2=2,卢2=一2.由于控制量的有限性,机械系统的惯性和电气系统的延时等原因,抖振是实际滑模系统中必然存在的现象.本文采用符号函数连续化的方法抑制抖振.在式(12)的控制函数中,开关控制量"可以表述为"r-6sgn(s)=寺(18)lal将式(18)稍加修改,使之变为"赤(19)式中:△表示边界层的厚度,是很小的正常数.式(19) 将符号函数变为的光滑连续非线性函数,系统成为一种具有准滑动模态的变结构控制系统.在滑模超平面s=0的△邻域内,系统具有很高的增益,这对于.抖振的抑制是有利的.因为系统的状态稍偏离切换面时,会产生很大的控制力将其拉回到切换面上.但是如果系统的状态测量存在较大的误差,则切换函数在s=0附近的符号可能有误,由此造成控制量符号的错误,此时大的控制力反而会引起更强的抖振.较大的△有利于削弱抖振,但会严重地降低滑模系统固有的不变性,同时影响系统的稳态精度.许多学者研究了边界层厚度的选取原则,并且提出了在线调整△以适应系统动力学不确定性的各种自适应控制算法.本文通过实验的方法对△进行调整,原则是:在系统不发生明显抖振的前提下,最大限度地保持系统的鲁棒性,因为这是滑模系统的优势所在.关节滑模位置控制系统的阶跃响应如图6所示.图6中,x是驱动关节的直线驱动器的位置.实验中,期望位置是2.5turn,驱动器经过50Ills左右到达期望位置,响应速度快,并且无超调,无振荡,这对于机器人及其灵巧手的抓握和操作是非常重要的.:============0,Ol0ot/ms图6关节位置控嗣系统的阶跃响应曲线Fig.6Stepresponseofjointpoat~eotaroll56电机与控制第7卷结合3.1.2节的轨迹插补算法,在自由空间中进行轨迹跟踪实验,结果如图7所示.由图7可以看出, 驱动器很好地跟踪了期望轨迹.g3'052OO一≥0.O5O.1O0.150.2Dn25t圈7关节位置控镧系统的轨迹跟踪曲线Fig.7Ihject0ryIcl【ingofjmtpositioncontrol4.2.2力矩控制实验图8是抓握过程中关节从自由空间到约束空间的力矩曲线.根据具体的操作任务和关节力矩传感器信号的噪声,选定力矩阈值为----7.5N?mm.当关节力矩达到瓦以后,设定期望力矩为:15N?衄一20N?衄一25N?衄一20N?mm-*15N?ram;阶跃变化的时间间隔是0.5s.结果显示,关节力矩控制系统可以实现快速而准确的力矩跟踪,切换算法可以保证控制模式的可靠切换和过渡过程的稳定.,-,g●t,s圈8抓握过程的关节力矩.8Jointtorqueresponseingraspingphase5结论为了使仿人灵巧手能够可靠而精确地抓握物体并进行精细作业,本文提出了一种新的关节位l/力矩控制方法:在自由空间和约束空间中分别采用滑模位置控制和具有前馈的PD力矩控制,在过渡过程中使用系统观测器进行控制模式的切换.这种方法可以使关节在自由空间和约束空间中分别实现良好的轨迹跟踪和力矩跟踪,在过渡过程中实现控制模式的可靠切换和系统的稳定过渡.以瑚rr灵巧手关节为对象进行的实验证明了该方法的有效性.{_|考文献:Il】JAo0BSENSC,WOODJE,KNU,rTIDF,eta1.TheUTAH/MITdextroushand:workinpmgreu【J】.TheInter? nationalJournalofRoboticsResearch.1984,3(4):21-50.【2】2SALISBURYJK,CRAIGJJ.Articulatedhands:fclroecon? tmlandkinematicissues【J】.InternationalJournalofRob? oticsResearch.1982,l(1):4—17.【3】BUTTERFASSJ,HIRZINGERG,KN0CHS,eta1.DLR'Smultisensoryarticulatedhand.partI:hard?andsoftwarearchitecture[A】.ProceedingsoftheIEEEInterna? tionalConferenceonRoboticsandAutomation[C].Leuven, nelgium,1998.2081—2086.【4】LIUH,BUTTERFASSJ,KNoCHS,cta1.Anewcontrol strategyforDLR'Smultisensoryarticulatedhand【J】.IEEE ControlSystems.1999,19(2):47—54.【5】LOVCHIKCS,DIFLERMA.TheRobonautHand:A dextrousrobotichandforspaceIA1.ProceedingsoftheIEEE InternationalConferenceonRobotics彻dAutomation.Detroit【q.Michigan,1999.907—912.【6】H0MAY0UNS.NonlinearandAdaptiveControlofForce andComplianceinManipulaton【J】.TheInternationalJour? nalofRoboticsResearch,l998,l7(5):467—484.用HOMAYOUNS,RICHARDC.Forcetrackinginimpedance control【J】.TheInternationalJournalofRoboticsResearch, 1997.16(1):97一ll7.【8】8SEULJ,HSIATC.Adaptiveforcetrackingimpedance controlofrobotforcuttingnonhomoganeousworkpiece[A】. ProceedingsoftheIEEEInternationalConferenceonRobo? ticsandAutomation[C].Detroit,Michigan.l99I9.1800一l805.【9】姜力.蔡鹤皋.刘宏.基于滑模位置控制的机器人灵巧手模糊自适应阻抗控制【J】.控制与决策,2001,l6(5):612—616.【lq理查德.P.保罗着.机器人操作手:数学,编程和控锚【M1.郑时雄,谢存禧译.北京:机械工业出版社.1991.13o—l(编辑:徐兴华)。
柔性关节空间机械臂奇异摄动自适应PD控制仿真研究

柔性关节空间机械臂奇异摄动自适应PD控制仿真研究刘福才;刘林;兰会;赵旭【摘要】建立了柔性关节机械臂空间漂浮和地面调试两阶段的动力学模型,并为柔性关节机械臂末端轨迹跟踪控制设计了基于奇异摄动的自适应PD控制算法,实现了对机械臂末端位置跟踪在空间漂浮和地面调试两阶段的控制.用奇异摄动法实现了将高阶系统降阶为两个低阶系统,即快子系统和慢子系统,再针对两子系统分别设计控制器.对控制系统进行了稳定性分析和仿真验证,结果表明设计的控制算法既可以实现在地面装调时的轨迹跟踪控制,也可以较好地实现空间漂浮状态下的轨迹跟踪控制.%The dynamic model of a flexible joint manipulator in the stages of space floating and ground debugging is es -tablished, and a singular perturbation based adaptive PD control algorithm for the manipulator 's end track trackingcontrol is designed to achieve the manipulator 's end position tracking control in the space floating stage and theground debugging stage.The singular perturbation method is used to divide the higher order system into two lowerones, i.e.a fast subsystem and a slow subsystem, and then the controllers for them are designed respectively .Thecontrol's stability analysis and simulation veritication are conducted , and the results show that the designed controlalgorithm can well achieve the trajectory tracking control both in the stages of ground debugging and space floating .【期刊名称】《高技术通讯》【年(卷),期】2017(027)009【总页数】7页(P833-839)【关键词】自由漂浮;柔性关节;空间机械臂;自适应;奇异摄动【作者】刘福才;刘林;兰会;赵旭【作者单位】燕山大学工业计算机控制工程河北省重点实验室秦皇岛066004;燕山大学工业计算机控制工程河北省重点实验室秦皇岛066004;燕山大学工业计算机控制工程河北省重点实验室秦皇岛066004;燕山大学工业计算机控制工程河北省重点实验室秦皇岛066004【正文语种】中文0 引言航天事业的发展,显示出了机械臂在空间作业中的越来越重要的作用。
移动机器人滑模跟踪控制

移动机器人滑模跟踪控制针对移动机器人动力学模型,通过线性解耦,将该线性耦合系统解耦成两个独立的子系统,使用积分滑模来实现滑模函数的设计,进行相应的稳定性分析。
标签:线性解耦;积分滑模;控制器设计Abstract:According to the dynamic model of mobile robot,the linear coupling system is decoupled into two independent subsystems by linear decoupling,and the sliding mode function is designed using integral sliding mode,and the corresponding stability analysis is carried out.Keywords:linear decoupling;integral sliding mode;controller design1 介绍移动机器人可通过移动来完成一些比较危险的任务,如地雷探测、海底探测、无人机驾驶等,在科研、工业、国防等很多领域都有实用价值。
然而,移动机器人是一个多变量、强耦合的欠驱动系统,难以对其进行高性能轨迹跟踪控制。
本文针对移动机器人动力学模型,通过线性解耦将其转化为两个独立的子系统,分别针对子系统设计了滑模跟踪控制。
仿真结果表明,该控制系统能够快速跟踪给定的线速度和参考角度,在工程上有一定的应用价值。
2 动力学模型2.1 移动机器人动力学模型的建立假设两轮独立驱动刚性移动机器人在平面内移动,如图1所示,两个前轮各采用直流伺服电机驱动,通过调节输入电压实现驱动轮的速度差。
假设绝对坐标OXY固定在平面内,则移动机器人动态特性可用动力学方程来描述。
对于车体,根据力矩平衡原理,车体转动角度=右轮主动力矩-左轮阻力矩,即(1)根据牛顿定律,得(2)其中:Iv为绕机器人重心的转动惯量,Dr和Dl分别为左右轮的驱动力,l 为左右轮到机器人重心的距离,?准为机器人的位姿角,v为机器人的线速度。
基于视觉跟踪的机器人测量方法与实现

基于视觉跟踪的机器人测量方法与实现刘洁;平雪良;齐飞;蒋毅【摘要】为了对自主研发的工业机器人进行校准从而提高其运动精度,提出一种采用双目视觉动态跟踪球面编号靶点的机器人标定方法,利用安装在机器人末端靶球上特征分布的编号标志点进行工作空间内任意位姿的测量,由最小二乘迭代准确辨识出机器人的几何结构参数对控制器进行补偿.利用MFC由开放式、模块化思想编制标定软件,设计视觉测量、数据处理、机器人控制等功能模块,最后通过测量实例和对比实验,验证其可靠性和准确性.实验表明,该软件测量得到的位姿数据具有较高的精度,扩大了传统视觉跟踪的视野范围;同时将识别得到的机器人模型实际几何参数进行反馈补偿,成功地将机器人绝对位置精度由3.785 mm提高到1.618 mm,姿态精度由0.235 提高到0.139.%In order to calibrate the self-developed industrial robot and improve its movement accuracy, a robot calibration method of dynamic tracking spherical target number by binocular vision was put forward. First we carried out the arbitrary position and orientation measurements in the workspace by marked-targets set on the sphere surface installed on the robot-end, which was distinguished and numbered by the particular arrangement and distribution, then accurately identified the geometry parameters of the robot by a least-square iterative and compensated them to controller.We established the calibration software including vision measurement, data processing, robot control and other modules by using MFC based on open, modular ideology, finally verified its reliability and accuracy by measuring examples and comparative experiments. Experimental results show that the pose data measured bythe software is precise, expanding the field of view of traditional visual tracking; and the identified actual geometry parameters can be compensated, successfully improving the robot positioning accuracy from 3.785 mm to 1.618 mm, as well as the orientation accuracy from 0.235 to 0.139.【期刊名称】《应用光学》【年(卷),期】2016(037)005【总页数】7页(P686-692)【关键词】空间位姿;视觉测量;工业机器人;定位误差【作者】刘洁;平雪良;齐飞;蒋毅【作者单位】江南大学机械工程学院, 江苏省食品先进制造装备技术重点实验室,江苏无锡 214122;江南大学机械工程学院, 江苏省食品先进制造装备技术重点实验室,江苏无锡 214122;江南大学机械工程学院, 江苏省食品先进制造装备技术重点实验室,江苏无锡 214122;江南大学机械工程学院, 江苏省食品先进制造装备技术重点实验室,江苏无锡 214122【正文语种】中文【中图分类】TP242随着工业科技的发展,机器人作为类人的自动化设备正逐步代替人类完成许多高强度、高精度、环境恶劣的工作任务,得到广泛应用。
2023届上海市虹口区高三上学期一模英语试题

2023届上海市虹口区高三上学期一模英语试题一、短对话1.A.In a school. B.In a gas station.C.In a hospital. D.In a garage.2.A.At 9:30. B.At 9:40.C.At 10:09. D.At 10:39.3.A.Planning a sports event. B.Writing up local news.C.Reading a newspaper. D.Putting up advertisements.4.A.It is luxurious. B.It is satisfactory.C.It is competitive. D.It is disappointing.5.A.He has had too many holidays this year.B.He isn’t in the mood to travel.C.Phuket is too far for a family holiday.D.Family holidays no longer interest him.6.A.His grandma is quite fond of the dress.B.The salad and dressing tastes very good.C.The salad and dressing can’t match his grandma’s.D.His grandma can’t make delicious salad wit h dressing.7.A.She is the speakers’ boss.B.She is not at home this Saturday.C.She is not easy-going.D.She seldom invites people to her home.8.A.The woman doesn’t like Serbia.B.The woman has been to Serbia.C.The woman is planning a trip to Serbia.D.The woman has no idea about Serbia.9.A.Live with Jane and Sophie.B.Ask Sophie about her accommodation.C.Invite Vivian to be her roommate.D.Share a room with Jane.10.A.The plane will leave at 3:20.B.The plane’s departure time remains unknown.C.The man has just missed his flight.D.The man is at a wrong check in counter.二、短文听下面一段独白,回答以下小题。
智能机器人使用手册说明书
User ManualPrecautions!Precautions for BatteriesThe batteries (battery pack or batteries installed) shall not be exposed to excessive heat such as sunshine, fire or the like.Only use attachments/accessories specified or provided by the manufacturer (such as the exclusive supply adapter, battery etc).Do not touch the product when it is moving to avoid hand injuries.1.2.3.All example of use refer to warning card.Keep this product away from fire and keep it dry and clean.Do not squeeze this product with too much force during use.Please use the robot on a flat surface.Maintain an appropriate distance from the robot while it is in operation to avoid injuries.When the robot is in operation, do not forcibly bend its joints as to avoid hand injuries and damage to the machine.Please use the supplied charger for charging the robot.The servos for robot joints are precisely designed and should not be disassembled without authorization. Contact us if necessary.For repair services, go to your local after-sales service center or contact our customer support.When an abnormality is found during debugging, immediately press the Emergency Stop button and cut off the power as to avoid hand injuries and damage to the machine.Take necessary preventive measures when using the robot. Do not use it at heights or near any edges as it may fall off and result in damage.Man-made damage is not covered by our warranty.It is best to use the robot for no longer than 1 hour each time, which will extend the service life of the servo actuators.This product is not intended for children under 14 years of age.You will be provided with software updates if any. For some features, the latest update instruction shall prevail.Please use HDMI cables with good shielding layers and magnetic rings when connecting Yanshee to an external monitor.1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15.16.Immediately Cut off the power and contact us when:Warning:EmergencyStop buttonCAUTION: Danger of explosion if battery is incorrectly replaced. Replace only with the same or equivalent type.Disposal of a battery into fire or a hot oven, or mechanically crushing or cutting of a battery, that can result in an explosion.Leaving a battery in an extremely high temperature surrounding environment that can result in an explosion or the leakage of flammable liquid or gas.A battery subjected to extremely low air pressure that may result in an explosion or the leakage of flammable liquid or gas.a. The robot smokes or you smell something burning; orb. Water or any other foreign matter enters the robot; orc. The robot is damaged.The User Manual contains important information. Please keep it for future reference!4.5.6.An "Emergency Stop" button is on the top of the robot. When the robot is in operation, you can press this button to immediately cut off the power and stop its operation.01. Packing ListYanshee RobotUser Data Set*1(Quick Start Guide*1,Warranty Card*1)Yanshee Robot components: 1Quick Start Guide: 1Warranty card: 1Battery: 1Power adapter: 1Power cord: 1Spare parts kit: 1 (wires, screws)Screwdriver: 1Charging dock: 1 (Selective Accessories)Sensor Suite: 1 (Selective Accessories)Usage Examples: 1Front view of YansheeBackside view of YansheeIntroduction to GPIO Extended Port Note:Ports 3, 5, 12, 35, 38 and 40 are used, of which ports 3 and 5 are for I2C communication and ports 12, 35, 38 and 40 are for audio I2S signaling.GPIO Pinout DiagramPhysicalPin No.Function Function03. SpecificationsAppearanceElectrical SpecificationsConstructionHumanoid Product ModelERHA101Product NameYanshee ColorSilver Dimensions 370*192*106 (mm)Weight ≈2.05 kgServo Actuators 17 degrees of freedom (DOF)Operating voltage DC 9.6VPower 4.5W~38.4WPower adapterOperating temperature Material Aluminum alloy structure, PC+ABS housing0℃ to 40℃Input: 100V ~240V, 50/60Hz 1.5AOutput: 9.6V, 4AMaster Chip and MemoryNetworkVision SystemSTM32F103VDT6Broadcom BCM2837 1.2GHz 64-bit quad-core ARMv8 Cortex-A53RAM 1GBProcessorMemory 16GBBluetoothBluetooth 4.1Battery capacity 3000mAhCamera 8 mega-pixel camera, fixed focusLightWi-Fi Operating system RaspbianSupports Wi-Fi2.4G802.11b/g/n fast connectEyes: 3-color LED lights *2Chest: 3-color LED notification lights *3Microphone: green indicator *1Charge: dual-color indicator *1AudioSensorsDebugging PortOthers MicrophoneSingle SpeakerStereo speakers *29-axle motion tracking sensor *1Motherboard temperature sensor *1POGO 4PIN *6Built-in sensorExtended port HDMI1GPIO40 (6 of them are used)USB2Control Mode Mobile software (APP); voice control;PC control (Raspbian )KeysFor BT :Maximum OutputPower :5.636 dBmFor 2.4G WIFI :Maximum Output Power : 18.19dBm ON/OFF key on the chest;Emergency Stop key on the top Applicable Standard04. Download and Sign in to Mobile Software (APP)Download the APP:Sign in:APP Download QR Code YansheeMethod 1: Scan the QR code below to enter the APPdownload page where you can click to download theYanshee APP;Method 2: Search and download "Yanshee" in APPStore/Google Play/MyAPP or other platforms.After installing the APP, run the APP and sign in according to the instruction. If you are a registered user, log into the APP directly.Method 3: Log onto /en to searchfor your desired product and download the app.05. Assemble the RobotOpen and log into the APP. Select the assembly tutorial to learn about how to assemble or disassemble the robot from the menu bar.Select the disassembly tutorial to learn about how to disassemble the robot.06. Install and Charge the BatteryInstall the Battery• The battery compartment is below the left arm of the robot. Rotate the battery cover clockwise 90° to unlock it.• Install the battery into the battery cover and then reinstall the battery cover. Rotate the battery covercounter-clockwise 90° to lock it.Charge the BatteryMethod 1: After installing the battery, connect the power cord to the charge port on the back of the robot to charge the battery.07. Start the Robot and Set up the Network Method 2: Place the battery onto the dock charger, and then connect the power cord to the charge port of the dock charger to charge the battery.• Press and hold the button on the chest for 2-3 seconds and release until the indicator is lit up in blue. The robot is booted up after you hear a boot-up sound.• Make sure that both the Bluetooth and Wi-Fi are enabled on the smart devices. Open and log into the Yanshee APP, and click the icon on the upper left of the home screen to connect the robot and set up the network.• Refresh and search devices detected by the system, and select the device to be connected according to the last 4 digits of the MAC address value on the label attached ontothe back of the robot.• After the desired device is selected, the APP will selectthe SSID identical to the local Wi-Fi to be displayed on thepage. Enter the correct Wi-Fi password and click the"Join" button, the robot will set up and connect to thenetwork and also give you a voice prompt, saying"Connecting".Note:You will hear a voice prompt saying "Connected" after successful connection.If the connection fails, you will hear a voice prompt saying, "Connection Failed". In this case, please set up the network again.You do not have to set up the network again for later use, just directly select the desired device from the list.After setting up the network, you can use the APP to controlthe robot and learn more information.08. Use of Mobile APPFall-over ManagementThe mobile APP has a built-in graphic user interface and integrates features including motion tracking, FPV, Blockly visual programming, action readback programming, curriculums, BBS and real-time sensor data view.This feature is off by default. You can enable the feature via the APP. The robot can pick itself up if it falls over whenenabled.Language SwitchingBoth Simplified Chinese and English are supported so far. Goto your APP to select the desired language for the robot.09. Built-in Smart ApplicationsRaspbian OS issued by Raspberry Pi is used as the robot software. This open source software comes with the following features:Speech RecognitionThe robot is configured with speech recognition and semantic recognition for Chinese, allowing you to chat with it.When the robot started, press the button on the chest until the chest lamp turns green, then you can chat with the robot after a "tinkling" sound is heard.Visual ProcessingThe robot is configured with face analysis, face tracking and other features. You can call these functions through the programming tools in the APP or Raspberry Pi system. UBTECH provides the Open SDK API, which enables you to configure your own visual identification functions withthird-party visual identification platforms.Note: please abide by relevant laws when using thethird-party voice platform.Auto Update:After the robot is connected to the Internet, the built-in platform software will automatically detect whether you have the latest version and execute the update process.Do not cut off the power or disconnect from the Internet while updating.10. Open Source Platform(2). Use the USB port on the Yanshee to connect a USB, keyboard and mouse.The Yanshee robot is built on the Raspberry Pi open source platform and open SDK files are provided, allowing a user to configure, learn or develop smart Applications as desired, and also allowing developers to create their own robot.(1). Use an HDMI cable to connect the Yanshee robot to amonitor.(3). You can log onto the Linux system from Raspberry Pi bysimply starting the robot.(4). SDK API and Demo codes are available from(5). For developers, please visit https://to learn more information about Raspberry Pi./enThis device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation.Note: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy, and if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:• Reorient or relocate the receiving antenna.• Increase the separation between the equipment and receiver.• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.• Consult the dealer or an experienced radio/TV technician for help.FCC Caution:Any changes or modifications not expressly approved by the party responsible for compliance could void the user's authority to operate this equipment.IMPORTANT NOTE:FCC Radiation Exposure Statement:This equipment complies with FCC radiation exposure limits should be installed and operated with minimum distance20cm between the radiator & your body.This transmitter must not be co-located or operating in conjunction with any other antenna or transmitter.FCC ID: 2AHJX-YANSHEE-1UBTECH ROBOTICS CORP LTDAdd: 16th & 22nd Floor, Block C1, Nanshan i Park, No. 1001 Xueyuan Road, Nanshan District, Shenzhen City, China P.R.T el: 800-276-61372019-09-25尺寸:95*130mm颜色:四色双面印刷材质:105g铜版纸工艺:骑马钉公差:±0.5mm。
基于改进YOLOX的移动机器人目标跟随方法

基于改进YOLOX 的移动机器人目标跟随方法万 琴 1, 2李 智 1李伊康 1葛 柱 1王耀南 2, 3吴 迪1摘 要 针对移动机器人在复杂场景中难以稳定跟随目标的问题, 提出基于改进YOLOX 的移动机器人目标跟随方法, 主要包括目标检测、目标跟踪以及目标跟随三个部分. 首先, 以 YOLOX 网络为基础, 在其框架下将主干网络采用轻量化网络 MobileNetV2X, 提高复杂场景中目标检测的实时性. 然后, 通过改进的卡尔曼滤波器获取目标跟踪状态并采用数据关联进行目标匹配, 同时通过深度直方图判定目标发生遮挡后, 采用深度概率信息约束及最大后验概率(Maximum a posteri-ori, MAP)进行匹配跟踪, 确保机器人在遮挡情况下稳定跟踪目标. 再采用基于视觉伺服控制的目标跟随算法, 当跟踪目标丢失时, 引入重识别特征主动搜寻目标实现目标跟随. 最后, 在公开数据集上与具有代表性的目标跟随方法进行了定性和定量实验, 同时在真实场景中完成了移动机器人目标跟随实验, 实验结果均验证了所提方法具有较好的鲁棒性和实时性.关键词 移动机器人, YOLOX, 重识别, 目标跟随引用格式 万琴, 李智, 李伊康, 葛柱, 王耀南, 吴迪. 基于改进YOLOX 的移动机器人目标跟随方法. 自动化学报, 2023,49(7): 1558−1572DOI 10.16383/j.aas.c220344Target Following Method of Mobile Robot Based on Improved YOLOXWAN Qin 1, 2 LI Zhi 1 LI Yi-Kang 1 GE Zhu 1 WANG Yao-Nan 2, 3 WU Di 1Abstract A target following method of mobile robot based on improved YOLOX is proposed to solve the problem that mobile robots are difficult to follow the target stably in complex scene. This method mainly includes three parts: Target detection, target tracking and target following. Firstly, the lightweight MobileNetV2X network is ad-opted under the YOLOX framework to improve the real-time performance of target detection in complex scene.Then, the improved Kalman filter is proposed to obtain the tracking state and data association is used for target matching. When the target is judged by depth-histogram, the depth probability constraint and maximum a posteri-ori (MAP) probability are utilized for matching, which ensure that the robot tracks the target stably under occlu-sion. Moreover, target-following algorithm based on servo control is proposed, and re-id feature is introduced to act-ively search for disappeared targets. Finally, qualitative and quantitative experiments on public data set and in real-world environments demonstrate the efficiency of the proposed method.Key words Mobile robot, YOLOX, re-id, target followingCitation Wan Qin, Li Zhi, Li Yi-Kang, Ge Zhu, Wang Yao-Nan, Wu Di. Target following method of mobile robot based on improved YOLOX. Acta Automatica Sinica , 2023, 49(7): 1558−1572移动机器人在安防、物流和医疗等领域应用广泛[1−2], 其中机器人目标跟随算法引起了广泛关注,但移动机器人目标跟随算法的鲁棒性和实时性仍是亟待解决的关键问题[3−4].机器人目标跟随算法分为生成式模型方法和检测跟踪方法两大类[5−6]. 生成式模型主要通过构建目标模型实现跟随, 如Yoshimi 等[7]利用视觉传感器获取行人颜色和纹理特征, 机器人在视野范围内寻找与之相匹配的区域, 融合行人与位置速度信息构建模型, 采用基于生成式的目标跟踪算法跟随行人.然而, 此类算法关注目标本身, 忽略背景信息, 经常出现跟踪丢失的情况.为同时考虑目标与背景信息, 检测跟踪方法得收稿日期 2022-04-27 录用日期 2022-09-26Manuscript received April 27, 2022; accepted September 26,2022国家自然科学基金 (62006075), 湖南省自然科学杰出青年基金(2021JJ10002), 湖南省重点研发计划(2021GK2024), 湖南省教育厅重点项目(21A 0460), 湖南省自然科学基金面上项目(2020JJ4246, 2022JJ30198)资助Supported by National Natural Science Foundation of China (62006075), Foundation Project for Distinguished Young Schol-ars of Hunan Province (2021JJ10002), Key Research and Devel-opment Projects of Hunan Province (2021GK2024), Key Projects of Hunan Provincial Department of Education (21A0460), and General Project of Hunan Natural Science Foundation (2020JJ 4246, 2022JJ30198)本文责任编委 程龙Recommended by Associate Editor CHENG Long1. 湖南工程学院电气与信息工程学院 湘潭 4111042. 湖南大学机器人视觉感知与控制技术国家工程研究中心 长沙 4100823. 湖南大学电气与信息工程学院 长沙 4100821. College of Electrical and Information Engineering, Hunan Institute of Engineering, Xiangtan 4111042. National Engin-eering Research Center for Robot Visual Perception and Control Technology, Hunan University, Changsha 4100823. College ofElectrical and Information Engineering, Hunan University,Changsha 410082第 49 卷 第 7 期自 动 化 学 报Vol. 49, No. 72023 年 7 月ACTA AUTOMATICA SINICAJuly, 2023到了越来越多的关注, 此方法通过构建分类器区分目标及背景, 其跟踪效果普遍优于生成式模型方法.余铎等[3] 通过快速判别尺度空间切换相关滤波算法与卡尔曼滤波算法实现稳定跟踪. 另外, 移动机器人在跟随控制过程中常受到背景杂斑、光照变化、目标遮挡、尺度变化等干扰, 导致跟随目标丢失. 因此传统的检测跟踪方法不适用于移动机器人在复杂多变场景中的目标跟随[2].基于深度学习的移动机器人目标跟随算法具有鲁棒性强等优势[8]. Zhang等[9] 通过基于目标轮廓带采样策略来提高移动机器人跟踪性能, 但未对遮挡、行人消失等情况进行处理. Pang等[10] 提出一种基于深度学习的目标检测器, 引入卡尔曼滤波来预测目标位置, 加入重识别模块处理遮挡问题, 但此类算法需先获取精度较高的目标检测结果. 鉴于上述问题, JDE (Jointly learns the detector and em-bedding model)检测模型可用来融合重识别与检测分支[11], 提高目标检测精度. YOLO (You only look once) 系列算法则是一类基于JDE检测模型的一阶段框下的目标检测算法, 具有高效、灵活和泛化性能好的优点.YOLO算法包括了YOLOV1 ~ YOLOV7系列算法以及一系列基于改进YOLO的目标检测算法. Redmon等[12] 提出YOLO算法进行目标检测,直接采用回归的方法进行坐标框的检测以及分类,使用一个端到端的简单网络实现坐标回归与分类,能够极大地提升目标的检测速度. 此后, YOLO的网络结构不断优化, 已经成为目标检测领域主流的算法. Hsu等[13]引入比率感知机制, 动态调整YOLOV3的输入层长度和宽度超参数, 从而解决了长宽比差异较大的问题, 能够有效地提高平均跟踪精度. Huang等[14] 引入改进的YOLOV3模型, 此模型将预测尺度从3个增加到4个, 并使用额外的特征图来提取更多的细节. YOLOV3的目标位置识别精度较差, 在目标分布密集、尺寸差异较大的复杂场景中, 检测效果较差. YOLOV4[15] 开发了Darknet53目标检测模型, 此模型具有更高的网络输入分辨率,网络层参数多, 计算复杂度高, 对小目标检测效果较差. 对此, YOLO-Z[16] 提出了一系列不同尺度的模型, 提高YOLOV5检测小目标的性能. Cheng等[17]提出一种单阶段SSD (Single shot multibox de-tector) 微小目标检测方法, 此方法可提高微小目标检测的实时性, 但其使用的两阶段式目标检测器使目标定位精度有所下降. YOLOV6[18]设计了更高效的主干网络和网络层. YOLOV7[19]扩展了高效长程注意力网络, 加入了基于级联的模型缩放方法,均可一定程度提高检测精度和推理效率, 但由于未引入重识别分支, 无法提取浅层特征用于后续跟踪. YOLOX[20]在YOLO系列的基础上做出了一系列改进, 相比于YOLO系列目标检测算法, 其最大的不同是采用了无锚框检测器. 而YOLOV1 ~ YOLOV5采用有锚框的检测器, 由于可能会被多个锚框同时检测且与检测框中心存在误差, 并不适用于JDE 检测模型. 因此, 采用无锚框的YOLOX目标检测算法更加适合于JDE检测模型.移动机器人检测与跟踪跟随目标的核心问题是其在运动过程中, 复杂场景干扰影响其检测精度以及跟随性能. YOLOX以Darknet53网络结构为主干, 有较高的检测精度, 但模型较大、推理速度较慢, 不适用于移动机器人实时跟随. 在YOLOV5的网络模型中, 虽然网络的特征提取能力随着深度的增加而增强, 但下采样次数的增加会导致梯度的消失, 这极大影响了移动机器人的检测精度[21]. 为了提升移动机器人的检测精度, DeepSORT目标跟踪算法[22]采用卡尔曼滤波更新目标位置, 并与当前检测目标关联匹配, 但未解决因遮挡跟踪造成的目标丢失问题. Han等[23]提出PSR (Peak side-lobe rate)目标跟踪算法, 引入深度信息来评估跟踪可信度,并可主动检测跟踪丢失目标. 但其采用相关滤波法实现目标跟踪, 在复杂场景下的跟踪鲁棒性低. 可见, 改进网络结构的同时引入深度信息, 是提升移动机器人检测跟随性能的一种亟待探索的方法.综上所述, 基于YOLO系列的移动机器人目标跟随算法的鲁棒性强且精度高, 但对于变化环境迁移和泛化能力弱, 且运行速率低. 传统移动机器人目标跟随算法速度快, 但是当目标发生形变、尺度变化和严重遮挡等情况时, 跟踪过程容易出现目标跟踪丢失. 因此, 为实现复杂场景下移动机器人稳定跟随目标, 本文提出改进YOLOX的移动机器人目标跟随方法(Improved YOLOX target-follow-ing algorithm, IYTFA). 主要工作如下:1)为提高目标检测精度和速度, 提出基于YOLOX-MobileNetV2X网络 (YOLOX-M2X) 的目标检测算法, 使用交叉熵损失、回归损失以及重识别损失函数, 共同训练检测与重识别分支.2)为提高目标预测与更新速率, 采用改进的卡尔曼滤波器获取目标跟踪状态. 同时加入基于深度直方图的遮挡检测机制, 并通过深度概率约束帧间目标匹配, 提高遮挡跟踪准确率.3)在目标跟随过程中, 提出基于视觉伺服控制的主动搜寻策略, 并在目标消失时引入重识别特征进行跟踪跟随, 保证移动机器人稳定跟随目标.本文内容安排如下: 第1节介绍IYTFA算法,7 期万琴等: 基于改进YOLOX的移动机器人目标跟随方法1559包括目标检测部分、目标跟踪部分和目标跟随控制部分; 第2节为实验验证, 简要说明移动机器人和深度学习平台, 定性、定量分析目标跟踪算法, 并进行移动机器人目标跟随实验; 第3节对本文工作进行总结与展望.1 IYTFA 算法IYTFA 移动机器人目标跟随方法的结构框图如图1所示, 主要由目标检测、目标跟踪及目标跟随控制三部分组成. 首先, 将YOLOX 的主干网络Darknet53替换为MobileNetV2X, 通过获取的RGB 视频序列输入训练完成的MobileNetV2X 网络得到特征图, 再将重识别损失函数和检测损失函数分别训练重识别分支及检测分支, 从而得到目标检测结果. 然后采用改进的卡尔曼滤波器获取跟踪状态, 通过轨迹关联实现目标匹配, 同时引入遮挡判别机制, 如判断目标被遮挡则加入深度概率约束进行遮挡目标跟踪匹配. 最后采用基于视觉伺服控制的主动搜寻策略完成移动机器人目标跟随.1.1 改进YOLOX 的目标检测算法目标检测是移动机器人目标跟随的关键问题,目标检测精度很大程度上决定了移动机器人跟随的稳定性. 本文以YOLOX 体系架构为基础进行改进, 优化网络结构与损失函数, 提高检测实时性. 主干网络使用MobileNetV2X 网络, 再通过检测分支与重识别分支得到检测结果.1.1.1 YOLOX-MobileNetV2X 网络YOLOX 算法[20]将解耦头、数据增强、无锚框以及标签分类等算法与传统的YOLO 算法进行融合, 算法泛化能力强, 检测小目标精度高.YOLOX 算法网络主要分为三个部分, 分别为主干网络、网络层和预测层. 其主干网络采用Darknet53特征提取网络, 网络层采用特征金字塔网络, 预测层使用了3个解耦头. 输入图片在主干网络部分进行浅层特征提取, 输出3个特征层传入网络层进行深层特征提取, 输出分别传入3个解耦头进行目标检测. 但是YOLOX 主干网络通常使用Darknet53网络, 存在模型尺寸大、推理速度慢等问题. 因此为实现移动机器人实时目标检测, 本文提出YOLOX-M2X 网络, 将YOLOX 主干网络采用轻量级的特征提取网络MobileNetV2X, 该网络的卷积核心层是深度可分离卷积层, 可将输出的特征图的通道数缩减至一半, 并再与原卷积层提取的特征图合并,与仅使用一组深度可分离卷积的MobileNetV2[24]相比, 该网络可获得更多特征图的语义信息.330×103220×103250×103在YOLOX-M2X 网络上, 先采用COCO2017训练集训练得到网络参数, 再移植至移动机器人平台进行实时检测. COCO2017数据集是一个可用于图像检测的大规模数据集, 包含超过 幅图像(其中 幅是有标注的图像), 涵盖150万个目标及80个目标类别(行人、汽车、大象等)、91种材料类别(草、墙、天空等), 每幅图像包含5句语句描述, 且有 个带关键点标注的行人.RGB 视频序列深度视频序列跟踪结果检测结果重识别分支分支分支目标分支网络层重识别头解耦头相机ZED 相机坐标系图像坐标系跟随行人移动机器人坐标系世界坐标系 M前景机器人跟随运动学模型MobileNetV2X主干网络ZED 相机模型浅层特征深层特征特征图F R F R F F f (t )X X Y Y Z R = O −z XYOww q q O R =x y z P = ∑ w f (x x 重识别−低维向量改进卡尔曼滤波器图 1 本文方法结构框图Fig. 1 Structure block diagram of our method1560自 动 化 学 报49 卷H ×W H W F ∈R H ×W ×C H W C MobileNetV2X 网络将目标检测时的分类分为7个阶段, 输入图片分辨率为 ( 为图片高度, 为图片宽度). 假设输入特征图表示为 , 其中 为高度、 为宽度、 为通道数.每个阶段的核心层为瓶颈层, 每个阶段的瓶颈层中包括4个步骤.F 1×1∈R H ×W ×C ′步骤 1. 使用1×1卷积核扩展特征图为 , 大幅减少计算量.F 1×1∈R H ×W ×C ′F 3×3∈R H ′×W ′×C ′步骤 2. 特征图 进行逐点卷积,再采用3×3深度可分离卷积得到特征图 .F 3×3∈R H ′×W ′×C ′F (3×3)/2∈R H ′×W ′×(C ′/2)F ′(3×3)/2∈R H ′×W ′×(C ′/2)F ′(3×3)/2∈R H ′×W ′×(C ′/2)F ′′(3×3)/2∈RH ′′×W ′′×(C ′/2)F ′′(3×3)/2∈R H′′×W ′′×(C ′/2)F ′(3×3)/2∈R H′×W ′×(C ′/2)F ′3×3∈RH ′′′×W ′′′×C ′步骤 3. 为进一步获得更多的语义信息, 将特征图 一分为二, 首先通过普通卷积将特征映射减少到原始通道数的一半, 得到特征图和 ,再将特征图 进行深度可分离卷积得到 , 然后将 与 两者结合在一起得到新的特征图 .F ′3×3∈RH ′′′×W ′′′×C ′F ′∈R H ′′′×W ′′′×C ′′步骤 4. 将新特征图 使用卷积核为1×1的投影卷积层再次卷积, 得到特征图为 , 即得到每个瓶颈层的输出特征图.F 7∈R 15×15×320F 1∈R 240×240×15在MobileNetV2X 网络中的第7个阶段得到深层特征图 , 在第1个阶段得到浅层特征图 , 经网络层后得到检测分支和重识别分支的输入特征图.1.1.2 目标检测分支及损失函数F 7∈R 15×15×320F detction ∈R H d ×W d ×C d F obj ∈R H ′o ×W ′o ×1F reg ∈R H ′r ×W ′r ×4(x y w h )F cls ∈R H ′c ×W ′c ×1F detection ∈R H ′d ×W ′d ×6MobileNetV2X 网络输出的检测分支特征图, 经网络层后得到特征图 , 再经过解耦头后得到检测分支, 包括目标、分类和回归三个分支. 输入目标分支的特征图为 , 分支中每个特征点代表对应预测框内被检测目标属于前景的概率, 据此判断目标是前景还是背景. 为稳定训练过程并加快收敛速度、精确定位目标, 该分支估计每个像素相对于目标中心的连续漂移, 以减少下采样的影响; 输入回归分支的特征图为 , 该分支对目标框的中心坐标点及高度宽度 , , , 进行预测; 输入分类分支的特征图为 ,该分支得到对目标所属类别的预测评分, 如目标属于行人、车辆、动物等不同类别的评分, 其代表目标属于各个类别的概率值. 最后将三个分支的输出结果合并相加得到特征图 , 即为目标检测分支的信息.L obj L reg L cls L detection 为度量目标检测信息和真实目标信息之间的差值, 进一步定义损失函数, 损失函数值越小则差值越小, 训练模型准确度越高. 由于MobileNetV2X 网络中的目标检测分支包括目标分支、回归分支和分类分支, 其对应损失函数由目标损失函数 、回归损失函数 和分类损失函数 三部分组成,总的训练损失函数 表示为λ1λ2λ3L obj L cls L reg 其中, , 和 是损失平衡系数. 和 采用二值交叉熵损失函数(Binary cross entropy,BCE), 采用交并比 (Intersection over union,IoU) 损失函数.L obj 在目标检测中, 需首先判定预测的目标属于前景或者背景, 目标损失函数 采用Focal 交叉熵损失函数度量其与真实值的差值, 即N obj L obj y s s p s s 其中, 代表用于计算 损失函数的视频帧目标总个数; 表示测试样本 的标签, 前景标为1,背景标为0; 表示测试样本 预测为前景的概率.L reg IoU IoU IoU 回归损失函数使用 损失函数来度量预测检测框与真实目标框的交并比(面积重叠度). 指标范围为[0, 1], 当面积重叠率越大时, 指标数值越大, 即IoU 其中, 表示当前帧目标预测框和目标真实框的面积重叠率,即交并比.为评判当前视频帧目标所属的类别与真实值的差值, 分类损失函数采用多分类交叉熵损失函数对目标所属类别的预测进行评分, 即N cls L cls M y dc d c y dc p dc d c 其中, 代表用于计算 损失函数的视频帧目标总个数; 表示类别的数量; 为符号函数, 如果当前视频帧目标 的真实类别等于 , 为1,否则取0; 为当前帧目标 属于类别 的预测概率.1.1.3 重识别分支及损失函数为在目标消失再出现时完成视频连续帧间的目标匹配识别(即目标重识别), 在YOLOX-M2X 网络中加入重识别分支提取目标的颜色、纹理等浅层外观特征作为重识别特征.MobileNetV2X 网络输出的重识别分支特征图7 期万琴等: 基于改进YOLOX 的移动机器人目标跟随方法1561F 1∈R 240×240×16F re-id ∈R H ri ×W ri ×C riF ′re-id∈R H ′ri ×W ′ri ×C ri F ′′re-id∈R H ′′ri ×W ′′ri ×128x y C ={c (b ),b ∈[1,B ]} 经网络层得到 ,首先使用3×3卷积核依次与输入特征图卷积, 得到特征图 , 再通过128组1×1的卷积, 得到具有128个通道的特征图 , 则在特征图中提取对应的目标框中心点( , )处的浅层外观特征作为该目标重识别特征. 同时使用全连接层和归一化操作将其映射到特征分布向量 .L id 为评判重识别特征图准确度, 定义重识别损失函数, 其值越小, 表示重识别特征图越准确. 并将重识别损失函数 定义为L la (b )B N re-id 其中, 目标真实框的标签编码为 , 是训练数据中所有身份(ID)的编号, 使用特征图对应的目标中心点重识别特征在YOLOX-M2X 网络进行训练, 表示当前帧中目标所属类别的总数.L id L detection 最后, 将检测和重识别损失函数相加, 同时使用不确定性损失函数[11]来自动平衡检测和重识别损失函数. 与单独使用 和 训练模型相比, 训练效果得到提升, 同时减少了计算复杂度, 可达到实时性要求.1.2 基于改进卡尔曼滤波的目标跟踪首先使用第1帧检测的目标框初始化目标轨迹及跟踪状态, 然后通过改进的卡尔曼滤波器预测下一帧目标位置, 最后采用连续帧间的数据关联确定目标跟踪状态.t M i =1,···,M t N j =1,···,N t i x t,i j z t,j 在当前视频帧下, 设 时刻检测到 个目标,, 时刻跟踪 个目标, ,每一帧检测及跟踪结果实时更新, 则当前 时刻的第 个检测目标状态为 , 第 个跟踪目标状态为.x t,i =(β,˙β)T β={u,v,γ,h }β(u,v )γh (˙u,˙v )˙γ˙h本文使用改进的卡尔曼滤波器对行人轨迹的状态进行预测和更新, 设目标状态为 ,. 其中 表示目标的观测值, 表示边界框中心位置, 高宽比为 , 高度为 . 目标中心点变化速率为 , 高宽比变化速率为 , 高度变化速率为 . 考虑带非加性噪声的一般非线性系统模型w t −1v t w t −1v t 其中, 和 分别是过程噪声序列和量测噪声序列, 并假设 和 是均值为0的高斯白噪声, 其Q t R t w t −1Q t V t R t 方差分别为 和 , 即 ~(0, ), ~(0, ).为详细说明改进卡尔曼滤波器预测与更新的过程, 算法1给出此部分的伪代码. 算法1. 改进卡尔曼滤波算法x 0,i P Q t R t 输入. , , , .x t +1输出. .x 0,i P Q tR t t =0初始化. 和协方差矩阵 , 确定噪声协方差矩阵 和 , 并且设置时间 .[1,t +1]1) for .ψ=V √DV [V,D ]=eig (P )ψP 2) , 其中, , eig 表示矩阵特征值分解, 为正半定平方根矩阵, 为协方差矩阵.φP i ρi =|⟨φ,P i ⟩|/(|φ|×|P i |)3) 计算均值 和协方差矩阵 之间余弦相似度 .ξt,i =φ+√∑M i =1ρi /(λρi )ψt 4) 计算容积点 .ωt,i (ε)=λρi /(4∑Mi =1ρi )5) 计算权重 .ξt,i ωt,i 6) 生成容积点 和 .ˆx t +1,i P t +17) 通过以下公式估计一步状态预测 和 方差.ˆx t +1,i =M ∑i =1w t,i f (ξt ,i) P t +1=n ∑i =1w t,i f (ξt,i )f T (ξt,i )−ˆx t +1,i ˆx T t +1,i +Q t ξt +1,i ωt +1,i 8) 与步骤3)类似, 生成容积点 和 .ˆz t +1,j P z t +19) 估计输出预测 , 协方差 .ˆx t +1,i =ˆx t +1,i +K t +1(z t +1,j −ˆz t +1,j ) K t +1=P z t +1 P t +1=P t +1−K t +1P z t +1K T t +1 .10) end for .i z t,j F ′′t,re-id ∈R H ′′ri ×W ′′ri ×128F ′′t −1,re-id ∈R H ′ri ×W ′ri ×128q (i,j )F ′′t,re-id∈R H ′′ri ×W ′′ri ×128F ′′t −1,re-id ∈R H ′ri ×W ′ri ×128采用改进卡尔曼滤波器获取上一帧目标 的中心点在当前帧的预测位置 , 同时通过重识别特征图 中对应该预测中心位置, 得到上一帧目标在当前帧的预测外观特征. 移动机器人在跟随过程中, 会出现遮挡、快速移动等情况, 余弦距离具有快速度量的优点. 采用余弦距离 [19]判别当前帧中心点对应的外观特征向量 与上一帧在当前帧的预测外观特征向量 是否关联.b i,j λb i,j λi j b i,j λ其中, 为正确关联轨迹集合. 在训练数据集上训练网络参数得到余弦距离, 并与训练集基准之间的余弦距离进行比较, 得到阈值 . 式(7)中, 当 小于阈值 , 表示当前帧检测目标 与上一帧跟踪目标 关联, 则跟踪正常; 当 大于阈值 , 表示未成功关联, 则继续判断目标是否遮挡或消失.1562自 动 化 学 报49 卷1.3 基于深度概率约束的遮挡目标跟踪跟踪目标由于被遮挡, 目标外观会发生显著变化, 导致目标特征减少, 移动机器人跟踪目标丢失.本文提出一种有效的遮挡处理机制, 当判断遮挡发生时, 采用深度概率对目标周围区域进行空间约束,并通过最大后验概率(Maximum a posteriori,MAP)关联匹配实现遮挡跟踪.1)遮挡判断由于多个目标相互遮挡时, RGB 外观被遮挡,只可从深度信息区分不同遮挡目标, 而ZED 相机获取的深度信息为多个遮挡目标中离该相机最近的目标深度信息. 因此将目标框在RGB 图中的位置区域映射到深度图中并设定为深度遮挡区域, 若判定其他目标进入此区域表示发生遮挡, 具体判定如图2所示.(a) 遮挡前(a) Before occlusion(b) 遮挡后(b) After occlusionRGB 图深度图深度直方图深度遮挡区域目标1目标2RGB 图深度图深度直方图图 2 遮挡前后深度直方图Fig. 2 Depth histogram before and after occlusion目标1遮挡前深度直方图最大峰值为4 000, 目标2遮挡前深度直方图的最大峰值为2 500, 发生遮挡后深度遮挡区域深度直方图最大峰值为2 500, 深度直方图的峰值从4 000下降到2 500. 显然, 此时目标1的深度遮挡区域的深度直方图出现新的上升峰值2 500, 且小于遮挡前的峰值4 000, 则可见目标被遮挡后的深度直方图峰值明显减少.j t −1t (d j t −d j t −1)N (w t ,ξ2t )因此, 可根据深度变化大小判定是否发生遮挡.设跟踪目标 在 帧和 帧之间的深度变化均值可以近似为高斯分布 ~ , 在此基础上判定是否发生遮挡.,d j t t j M j |(d jt −d j t −1)|t −1t |(ωt −ξt )/(ωt −1−ξt −1)|t t −1∑w t −ξt j|(d jt −d jt −1)|w t −ξt 式中 是第 帧中跟踪目标 的深度值; 表示第 与第 帧之间所有目标深度差之和; 表示第 帧与第 帧之间深度值变化率, 其值足够大表示发生遮挡. 代表小于 的所有跟踪目标深度值差之和. 其遮挡判断准则为d j t D jt T j T j 当目标未被遮挡时, 接近 , 接近于1; 当目标被遮挡时, 则 接近于0.2)遮挡匹配跟踪S 当目标发生遮挡时, 通过最大后验概率关联当前帧检测目标与上一帧跟踪目标, 可有效解决遮挡跟踪问题. 假设所有运动目标之间相互独立, 设单个目标轨迹组成为 , 似然概率具有条件独立性,则关联遮挡目标的目标函数为P (z t −1,j )P (x t,i |z t −1,j )式中, 是所有跟踪目标的先验概率; 表示当前检测目标属于跟踪目标的条件概率, 该条件概率通过检测目标与上一帧跟踪目标框的重叠率计算得到.x t,i b (x t,i )z t −1,j b (z t −1,j )b (x t,i )b (z t −1,j )设当前帧检测目标 的深度图对应的边界框为 , 跟踪目标 的深度图对应的边界框为 , 通过判断 与 的重叠率来表示跟踪置信度, 式(11)用于求目标框的重叠率, 即σC σx t,j z t −1,j 式中, 为重叠区域, 若 大于 , 表示 与 关联匹配.1.4 基于视觉伺服控制的目标跟随在获取目标跟踪结果后, 选定感兴趣的一个目标作为移动机器人的跟随目标. 为使移动机器人实7 期万琴等: 基于改进YOLOX 的移动机器人目标跟随方法1563现目标跟随, 本文采用基于视觉伺服控制的目标跟随算法, 使跟随目标框的中心点保持为视野范围中心点. 如目标消失, 则移动机器人按照目标运动轨迹进行主动搜索, 重新识别目标并使移动机器人继续跟随目标.1.4.1 基于ZED 相机的移动机器人运动学模型由于ZED 相机具有成像分辨率高、可获取远距离深度图像等优点, 本文采用ZED 相机作为移动机器人视觉传感器, 其内参已标定.Y P =(x cn ,y cn ,z cn )z n 假设ZED 相机的镜头畸变小到可以忽略, 相机固有参数用针孔模型表示, ZED 相机成像原理图如图3所示. 在图像坐标系 的跟踪目标坐标为, 是从图像坐标和ZED 相机的固有参数中获得f b f b d x l x r 其中, 为相机焦距, 为左右相机基线, 和 是通过先验信息或相机标定得到. 其中由极线约束关系, 视差 可由左相机中的像素点 与右相机中的像素点 对应关系计算得到.YXX rX lX − bZf像平面相机基线左相机右相机P = (x cn , y cn , z cn )图 3 ZED 相机成像图Fig. 3 ZED camera imageryG P R Z Y C (x,y )D θ本文算法将移动机器人平台简化为基于ZED相机的两轮差速模型, 如图4所示. 图4中包括世界坐标系 、机器人坐标系 、ZED 相机坐标系 和图像坐标系 . 图中, 为移动机器人运动中心点, 为两轮之间的距离, 为方向角.G O T O M R rw =O T −O M Z TM O T O M 在世界坐标系 中, 跟踪目标位置 与机器人位置 之间的距离可表示为 .在ZED 相机坐标系中, 目标到机器人的距离 是由跟踪目标位置 和机器人位置 通过式(13) 得到R (θQ ,θC )Q Z δd M 其中, 表示从世界坐标系 到ZED 相机坐标系 旋转矩阵. 表示在世界坐标系 中,移动机器人与摄像机的距离.1.4.2 机器人主动控制策略前述跟踪算法完成目标跟踪, 并获取目标跟踪框的深度信息, 但直接使用目标跟踪框的深度信息来计算机器人与跟随目标的距离, 会引入大量的背景信息. 因此需要对目标中心进行重定位, 为跟踪区域找到合适的位置, 提高机器人跟随精度.(x l ,y l )∈ˆβˆβˆβˆkr ˆβ⊙∗目标跟踪框中心设为 , 表示目标跟踪框区域内所有像素坐标. 区域的精确位置在 内重定位, 利用循环矩阵 与 进行同或 运算得ˆy ∗ˆy ∗j (∆x,∆y )(x ∗,y ∗)(x l ,y l )(x ∗,y ∗)在 中最大值的位置 即为精确目标跟踪中心 与 之间的位置偏差. 跟踪区域的精确位置 计算为(x ∗,y ∗)(x ∗,y ∗)f (t )f ∗(t )得到精确位置 后, 获取以 为中心区域框的4个顶点坐标, 计算中心点和顶点对应深度信息平均值 , 其值表示为移动机器人与目标的距离. 设移动机器人期望到达位置为 , 误 X control =[U (t )=v t ,W (t )=w t ]v t w t 机器人控制变量为 , 代表移动机器人的线速度,代表移动机器人的角速度, PID 控制器设计为k P k I k D λ其中, , 和 为PID 系数, 是调整因子.G目标位置w M T = x cny cnz cn图 4 基于ZED 相机的两轮差速驱动模型Fig. 4 Two-wheel differential drive model based on ZED1564自 动 化 学 报49 卷。
辽宁省部分学校2023-2024学年高一上学期10月月考英语试卷(含答案)

辽宁省部分学校2023-2024学年高一上学期10月月考英语试卷学校:___________姓名:___________班级:___________考号:___________一、阅读理解Expat Private Bike TourThis 2. 5-hour tour is the perfect introduction to Amsterdam! It is not hard to fall in love with this city and its romantic canals (运河), but it does require some guidelines on how to understand the Dutch way of living. During this 2. 5-hour bike ride we will show the following highlights, combining them with the rich history of Amsterdam and practical everyday tips.During this private tour we will not only show you the beauty of the city, the wonderful parks, the cute coffee places, and the attraction of the city when driving over the UNESCO Canal Belt, but also where to get your fresh fruit, and where to find the perfect place for net-working!This tour is the thing to book, if you are a company working with foreigners, and aiming to offer your newcomers a warm welcome and as much information as possible on their new work and life environment in Amsterdam. Also,being a couple of friends,arriving new in this city, this tour gives you the advice that will persuade you to stay!Tour highlights:•Local markets to get fresh fruit and vegetables•Fancy places to go networking•Beautiful parks to enjoy your free time•Tasting typical Dutch bites•Flower marketDuration:1.5 hours of biking with some stops in the middleAvailability (有效性):Every day at 11: 30 amPricing:1-7 persons, 240 euro fixed price8 or more, 35 euro per person1、Why should a company working with foreigners book the tour?A. To do some exercise.B.To make more friends.C.To welcome newcomers.D.To create new work environment.2、What can people do during the bike tour?A. Visit art museums.B. Taste local food.C. Do creative things.D. Experience farm work.3、How much do six persons pay for booking the tour?A. €35.B. €40.C. €210.D. €240.Every dog should have a loving home, and thanks to a 13-year-old boy named Thiago, many are now closer to finding one.Thiago is a self-described animal lover hoping to help the homeless dogs in his home city of Antonio Prado. So, he came up with an idea. Maybe if he could make the dogs on the street look more attractive, they’d have more chances to be adopted (收养). So he began giving baths to dogs in his spare time. This great idea is what led Thiago to create a project called “Sou de rua mas to limpinho” at the end of 2020.With the help of his father, he began looking for dogs who needed a helping hand. “At the end of last year, I decided that I needed to somehow do something for the animals,”Thiago said. “While talking to my father, I told him about my idea of bathing street dogs so they can stay clean and smell good and people may look at them differently.”Before the effort truly took off, Thiago and his dad had to work out how to win the dogs over. ‘Catching dogs on the street is difficult, since they are always frightened and many have suffered from ill treatment,” Thiago explained. “So we spent some time without baths until my father spoke to the public service organization and we started to bathe their newly saved dogs.”In addition to bathing them, Thiago started adding little accessories (配饰) to the dogs, such as little hair pins, to really increase their chances of adoption. The boy’s dad also took pictures of the dogs and posted them online, pointing any possible adopters to the nearby shelters (收容所). “I want people to be not afraid to adopt,” Thiago said. “It’s the best thing in the world.”4、Why did Thiago create “Sou de rua mas to limpinho”?A.To provide baths for dogs.B.To raise money for animal shelters.C.To help homeless dogs get adopted.D.To draw public attention to animal care.5、What was a problem facing Thiago and his dad at the start of the project?A.They were short of bath products.B.The homeless dogs distrusted them.C.People showed no interest in adoption.D.Possible adopters preferred young dogs to old ones.6、Which of the following best describes Thiago?A. Confident.B. Caring.C. Humorous.D. Serious.7、What can be a suitable title for the text?A.Boy Helps Dogs Find a New HomeB.Boy Adopts Dogs in Bad ConditionsC.Lost Dogs Require Getting AdoptedD.Homeless Dogs Move into SheltersAnyone who’s tried to sleep on a hot summer night knows how hard it is to sleep when the temperature is rising. So it’s no surprise that global warming is likely to cost people more and more sleep as temperatures around the world rise.A new study written by Kelton Minor shows that by the end of this century, people could be subjected to at least two weeks of short sleep each year because of high temperatures driven by global warming.“The sleep loss per degree of warming was twice as large among the elderly compared to younger or middle-aged adults, three times larger for people living in lower-income countries compared to high-income countries, and significantly larger for females than males.” Minor said“Importantly, we found some evidence that the temperature-sensitivity of sleep in late adulthood may increase between the ages of 60 and 70, with the magnitude (程度) of sleep loss per degree of warming increasing further for those older than 70.” Minor added.Minor said these findings are based on data (数据) from a first-of-its-kind “planet natural experiment”in which more than 47, 600 people from 68 countries wore sleep-tracking watches from September 2015 through October 2017. Minor and his partners then compar ed the 7.4 million sleep records they’d gathered against local weather and climate data, to see how heat influenced their sleep.Data show that on very warm nights—30 °C or higher—sleep reduced an average of just over 14 minutes, and the likelihood of getting fewer than seven hours of sleep increased astemperatures rise.Generally, people slept later and wake up earlier during hot weather, researchers said. They also found that people already living in warmer climates experience greater sleep loss as temperatures rise, and that people don’t suit temperature-caused sleep loss in the short term. So Minor’s team will study how to make people better used to temperature-caused sleep loss in the short term.8、What is the purpose of paragraph 1?A.To give an example.B.To make a comparison.C.To provide some advice.D.To lead in the topic of the text.9、Why does the author mention “planet natural experiment” in paragraph 5?A.To explain the source of the research data.B.To give the suggestion of changing temperature.C.To present the fact that the temperature is rising.D. To find the way on how to face the high temperature.10、What will Minor and his team study next?A.The result of temperature-caused sleep loss.B.The process of temperature-caused sleep loss.C.The way to suit temperature-caused sleep loss.D.The influence of temperature-caused sleep loss.11、What is the main idea of the text?A.Global warming could be a real problem.B.Global warming could affect human health.C.Global warming could drive more terrible sleep.D.Global warming could mean less sleep for people.Last Friday, a special thing took place at the National Theater of Korea. A robot called EveR 6 led an orchestra (管弦乐队) in a performance of Korean music. Robots have led orchestras in other countries, but this was the first time ever in Korea.EveR 6 is a robot built by the Korea Institute of Industrial Technology (KITECH). It’s about as tall as a person, and has a human-like face that can show feelings. EveR 6 has joints (关节)in its neck, shoulders, etc. As a result, it can move its arms quickly in many different directions.But EveR 6 doesn’t think on its own like some Artificial Intelligence programs. Instead, it has a limited group of movements that it has been trained to perform. To make thesemovements as natural as possible, EveR 6’s movements are learnt from real human conductors.When EveR 6 moved its baton (指挥棒) for the first time,a piece of music rang out. Every movement of the robot’s arms brought more instruments into the mix, and the orchestral music grew louder and more exciting. Mr White, a human conductor, was impressed with the way EveR 6 moved. “The robot was able to present such difficult moves much better than I had imagined,” he said.the robot’s greatest weakness is that it can’t hear. “Some people think that conducting is just about hand waving and keeping the beat,”says Mr White. But a good conductor needs to listen to the orchestra, so that he or she can correct and encourage the orchestra as it plays.Mr White doesn’t think robots are likely to replace human conductors. But he believes robots could be helpful in situations like practice parts where the same thing needs to be done many times.12、What is paragraph 2 mainly about?A.The effect of EveR 6.B.The advantage of EveR 6.C.The importance of EveR 6.D.The basic information of EveR 6.13、What does the underlined word “supersede” in paragraph 5 mean?A. Look forward to.B. Take the place of.C. Show interest in.D. Make an impression on.14、Which of the following may Mr White agree with?A.Robots’ role as a conductor will be overlooked.B.Robots are useless in practice parts of a conductor.C.Robots could work in some fields of conductors’ work.D.Robots make human have no chance to be a conductor.15、In which section of a newspaper may this text appear?A. Science.B. Sports.C. Health.D. Education.二、七选五16、How to Prepare for the New School YearAfter a few months away, preparations for a new school year can be at a loss. ①________, the transition (过渡) to the regular routine of the school week can be a challenge. Here are some tips which help gain your confidence as you start the year ahead.Review what you learned last year. You don’t have to study for long hours. This can beas simple as reviewing the subjects that you studied and reading through summaries of the books quickly that you read last year. ②________.Buy all required supplies. ③________, or you may need to make your own list of the supplies that you will need. Some supermarkets run promotional sales during the weeks leading up to the school year, and you can often get all of the supplies that you need in one stop.④________. Get your supplies ready in advance so that you will have a chance to double check that you have everything. Make sure that your bag is large enough to carry the things that you will need daily. Use the parts of your backpack to make all of your supplies easily get.Start a sleep schedule. To be at your best, you will need to be well rested at the start of the school day. ⑤________, you may find it difficult to adjust to the earlier schedule. Since the amount and quality of your sleep influence your study success, it is important to start this adjustment before classes begin.A. Pack your school bagB. Design your school bag by yourselfC. Your school may provide a list that you needD. Whether you spent the summer relaxing or workingE. A quick refresher will get your mind ready for studyingF. If you have kept late hours during your summer holidayG. Anyone who does well in review will enter a good school三、完形填空(15空)Roman McCormick is just a 15-year-old teenager, but he’s already been through more(肾) failure over time.get tested to see if they were a match for Roman on TV. But they were not positive aboutmatch. All that was left to do was tell the McCormick family that their nightmare (噩梦) washoped the surgery would give her son ‘‘his teenage years back”.now. Let’s wish them the best of health.17、A. lectures B. challenges C. adventures D. experiments18、A. injury B. view C. illness D. behaviour19、A. requested B. arranged C. ordered D. recommended20、A. regretting B. struggling C. pretending D. volunteering21、A. obviously B. actually C. finally D. secretly22、A. accident B. movement C. news D. interview23、A. discovered B. recognized C. refused D. tested24、A. responsibility B. effort C. force D. position25、A. gave out B. pointed out C. carried out D. found out26、A. improve B. quit C. end D. appear27、A. overjoyed B. impressive C. confused D. anxious28、A. concerned B. hopeful C. curious D. frightened29、A. expecting B. competing C. suffering D. gaining30、A. went through B. applied for C. got over D. gave up31、A. relaxing B. practicing C. advancing D. recovering四、短文填空32、In old time, local officials must offer some tributes(贡物) to the emperor each year. Mian Bogao, ①_______ came from Yunnan,was sent to deliver a swan (天鹤) to the emperor.There was no transportation at that time and he had to walk to Chang an. It was a long and hard time. He kept on ②_______ (walk) without a break whether day ③_______ night.A few days later, Mian Bogao was very tired and also found the swan was very ④_______ (dust) , so he decided to help the swan take ⑤_______ bath in the riven As soon as the swan ⑥(put) into the river, it beat its wings and flew away. Finally, Mian Bogao only got several feathers. He had no choice but ⑦_______ (send) these pieces of feathers to the emperor. Butsurprisingly, the emperor rewarded Mian Bogao instead ⑧_______ getting angry. This story can make us understand two points: First, people should be honest and trustworthy, like MianBogao. The swan flew away, only the swan feathers remained, and he ⑨_______ (honest) offered the swan feathers to the emperor; second, for a gift to someone else, it is the affection that matters, not the gift ⑩_______ (it).五、书面表达33、假定你是李华,你的外国朋友Peter和你一样开始了高中生活。
机器人仿生手

Abstract: In this paper, an overall description of the design of a robotic hand is discussed, with particular attention to the required sensory subsystem, its integration within the mechanical structure of the hand and the required control architecture. Different solutions for the joint configuration and the structure of the tendon network adopted for the transmission system are present together with three types of sensors applied on the finger and on the actuators. The integrated design of the hand finger and the sensors is reported and the motivations leading to this particular implementation are thoroughly addressed, taking into account both the mechanical constraints and the control requirements. Keywords: Robotic hands, Robotic design, Sensor systems, Sensors integration, Robot control. 1. INTRODUCTION Researchers involved in the development of dexterous robotic hands agree that a mechatronic approach to hand design is the only way to generate new levels of functional capabilities. As reported by several authors (e.g Liu et al. (2008)), the problems relative to the single component or subsystem design must be solved within a general frame of compatibility and integrability. Numerous projects developed in the past could be cited. Such projects were either focused on partial approaches or, in the case they tried a complete integration between structural, sensory and control issues, not always fully successful. Comparing the features exhibited by each design with those of the reference model, the human hand, it is evident that many evolution steps are still necessary and further effort on dexterous hands development is fully motivated. In our opinion, this effort must be oriented by explicit “driving issues” that can globally define the direction of the research. In the specific case of robot hands there are many reasons to consider a biologically inspired design a valid target to be pursued. Though the integral implementation of such a target is made difficult by inadequate knowledge and by lack of technology, this is not a reason for by-passing the problems adopting solutions that are easily available but not coherent with the chosen research direction. A simple case to explain this point. It is well known that using pulleys to route tendons can greatly reduce problems in tendon-driven actuation of joints. Still, developing a hand based on pulley routing does not contribute to investigate and approach the structure or the efficiency of a biological tendon system, even if it is a valid short-track that allows to obtain an efficiently moving structure with limited effort. Along with the development of our previous U.B. Hand III project and the observation of the past and current re⋆ Corresponding Author, email: gianluca.palli@unibo.it
2024届浙江省宁波市高三下学期第二次模拟考试英语试题

宁波市2023学年第二学期高考与选考模拟考试英语试卷注意事项:1.答卷前,考生务必将自己的姓名、准考证号填写在答题卡上。
2.回答选择题时,选出每小题答案后,用铅笔把答题卡上对应题目的答案标号涂黑。
如需改动,用橡皮擦干净后,再选涂其他答案标号。
回答非选择题时,将答案写在答题卡上,写在本试卷上无效。
3.考试结束后,将本试卷和答题卡一并交回。
第一部分听力(共两节,满分30分)做题时,先将答案标在试卷上。
录音内容结束后,你将有两分钟的时间将试卷上的答案转涂到答题卡上。
第一节(共5小题;每小题1.5分,满分7.5分)听下面5段对话.每段对话后有一个小题,从题中所给的A、B、C三个选项中选出最佳选项,并标在试卷的相应位置。
听完每段对话后,你都有10秒钟的时间来回答有关小题和阅读下一小题。
每段对话仅读一遍。
1. Where does the conversation probably take place?A. In a hospital.B. In a factory.C. In a hotel.2. When will the speakers arrive at the airport probably?A. At 3: 30.B. At 4: 30.C. At 5: 30.3. What suggestion does the woman give to the man?A. Avoiding working at night.B. Getting all the parts from Japan.C. Buying a new washing machine.4. What are the speakers talking about?A. How to get to New York.B. How to enter for a course.C. How to get a driving licence.5. What kept the woman awake last night?A. The heat.B. The repairs of the power.C. The storm.第二节(共15小题;每小题1.5分,满分22.5分)听下面5段对话或独白。
基于视觉引导的工业机器人定位抓取系统设计
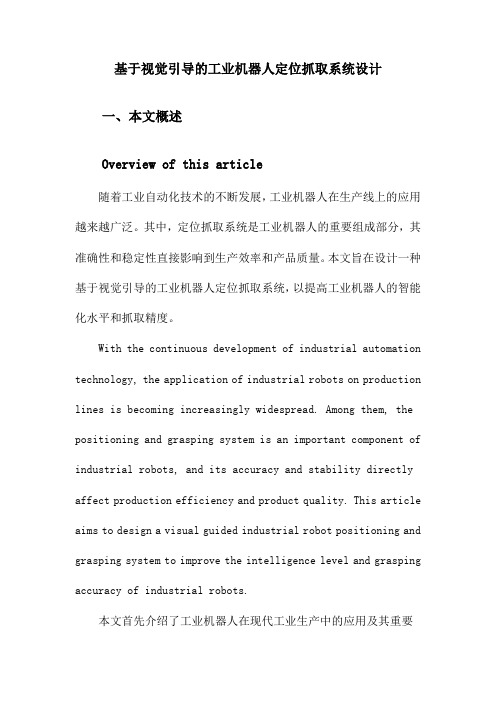
基于视觉引导的工业机器人定位抓取系统设计一、本文概述Overview of this article随着工业自动化技术的不断发展,工业机器人在生产线上的应用越来越广泛。
其中,定位抓取系统是工业机器人的重要组成部分,其准确性和稳定性直接影响到生产效率和产品质量。
本文旨在设计一种基于视觉引导的工业机器人定位抓取系统,以提高工业机器人的智能化水平和抓取精度。
With the continuous development of industrial automation technology, the application of industrial robots on production lines is becoming increasingly widespread. Among them, the positioning and grasping system is an important component of industrial robots, and its accuracy and stability directly affect production efficiency and product quality. This article aims to design a visual guided industrial robot positioning and grasping system to improve the intelligence level and grasping accuracy of industrial robots.本文首先介绍了工业机器人在现代工业生产中的应用及其重要性,并指出了定位抓取系统在设计中的关键性。
接着,阐述了基于视觉引导的定位抓取系统的基本原理和优势,包括通过摄像头捕捉目标物体的图像信息,利用图像处理算法提取目标物体的特征,并通过机器人控制系统实现精准定位与抓取。
介绍一款机器人英语作文

介绍一款机器人英语作文English Answer:Meet the Future of Language Learning: The Conversational English Robot.In the realm of language acquisition, technology is revolutionizing the learning experience. Enter the conversational English robot, a groundbreaking companion designed to enhance your fluency and confidence in the English language. This state-of-the-art device combines cutting-edge artificial intelligence (AI) with immersive conversation scenarios, offering a personalized and interactive learning journey.Unveiling its Features.The conversational English robot boasts a comprehensive suite of features that cater to every learner's needs:Natural Language Processing (NLP): Using advanced NLP algorithms, the robot understands your speech and text input, engaging in natural and intuitive conversations.Personalized Learning Path: Tailored to your skill level and goals, the robot constructs a custom learning plan, ensuring efficient progress and targeted practice.Immersive Conversation Scenarios: Simulated real-world interactions immerse you in authentic English language environments, fostering conversational fluency.Interactive Feedback: The robot provides immediate feedback on your pronunciation, grammar, and vocabulary, identifying areas for improvement.Gamification and Progress Tracking: Engaging game-like elements and progress tracking motivate you, making learning fun and rewarding.Benefits of Conversational English Robot.Embracing the conversational English robot offers a multitude of benefits:Improved Fluency: Regular conversations with the robot enhance your ability to communicate confidently and spontaneously.Enhanced Confidence: Constant feedback and progress tracking boost your confidence in using English in real-world situations.Accelerated Language Acquisition: Personalized learning and immersive scenarios accelerate your language learning journey.Convenience and Flexibility: Access the robot anytime, anywhere, making learning fit seamlessly into your busy schedule.Engaging and Enjoyable: Gamification and interactive conversations turn language learning into an enjoyable and engaging experience.Conclusion.The conversational English robot is a transformative tool for anyone seeking to master the English language. Its advanced technology, personalized learning, and engaging features empower you to achieve your language goals effectively and efficiently. Embrace the future of language learning and unlock your full potential with the conversational English robot today.中文回答:对话式英语机器人,开启语言学习新时代。
2023-2024学年人教版高中英语整理热点题型(含多套真题及答案)

2023-2024学年人教版全国高中英语同步练习学校:__________ 班级:__________ 姓名:__________ 考号:__________注意事项:1.答题前填写好自己的姓名、班级、考号等信息;2.请将答案正确填写在答题卡上;一、填空题(本大题共计5小题,每题3分,共计15分)1.Sit﹣down habit is killing usHow many hours do you spend sitting in a chair every day?Eight hours in the office plus three hours in front of the TV after work is the norm for many people.You probably don't need an expert to tell you that sitting too much is not good for your health﹣﹣﹣from an increased risk of heart disease and obesity(肥胖) in the long term,to reduced cholesterol(胆固醇)maintenance in the short term,not to mention the strain(拉紧)on your neck and spine.To make matters worse,a growing body of research finds that negative effects of sitting too much cannot be replaced with a good diet and regular exercise,according to an article in The New York Times.The article reported that a 2010study of nearly 9,000Australians found that for each additional hour of television a person watched per day,the risk of dying rose by 11percent.Another study tracked the health of 123,000Americans between 1992and 2006.The death rate for men who spent six hours or more per day sitting was about 20percent higher than for men who sat for three hours or less.The death rate for women who sat for more than six hours a day was about 40percent higher.In other words,sitting is killing us.Stand up for healthSo what can we do about it?Health experts suggest we break up those many hours spent sitting with more hours spent standing.The BBC and the University of Chester in the UK conducted a simple experiment with a small group of 10volunteers who usually spent most of the day sitting.They were asked to stand for at least three hours a day.The researchers took measurements on days when the volunteers stood,and when they sat around.When they looked at the data there were some striking differences,the BBC reported on Oct.16.Blood glucose leveled off (呈平稳状态)after a meal much quicker on the days when the study subjects stood compared with the days they spent in a chair.Standing also burned more calories﹣about 50calories an hour.Over the course of a year that would add up to about 30,000extra calories,or around 3.63kilograms of fat."If you want to put that into activity levels,then that would be equal to running about 10marathons a year,"said John Buckley,a member of the research team."Just by standing up three or four hours during your day at work."Buckley said that although doing exercise offers many proven benefits,our bodies alsoneed the constant,almost imperceptible(感觉不到的) increase in muscle activity that standing provides.Simple movement helps us to control our all﹣important blood sugar.The researchers believe that even small adjustments,like standing while talking on the phone,going over to talk to a colleague rather than sending an e﹣mail,or simply taking the stairs instead of the elevator,will be of great help to us.Sit﹣down habit is killing usNegative effects caused by sitting too muchBesides(71)________ the risk of heart disease and obesity in the long term,sitting too much also leads to(72)________cholesterol maintenance in the short term.It will keep our neck and spine strained.(73)________of many researchesA good diet and regular exercise cannot74________the negative effects of sitting too much.The more hours one spends watching TV,the(75)________the death rate will be.(76)________with the days one spent in a chair,blood glucose levels off after a meal much quicker on the days when they stood.The amount of calories that are (77)________by standing is equal to that by running about 10marathons a year.(78)________made by experts,We should break up those many hours spent sitting with more hour spent standingSimple movement helps us to keep our all﹣important blood sugar under(79)________.We should start from small adjustments,which will (80)________us greatly.【答案】increasing, reducing, Results, replace, higher, Compared, burned, Suggestions, control, help【解析】71.increasing 考查动名词.根据besides为介词,意思是除…之外,后需接动名词形式.72.reducing/reduced/decreasing/decreased 考查分词.句子里lead to是固定短语,引起、导致,to是介词,后需接动名词形式.73.Results/Findings 考查名词.根据后面的of many researches很多研究,所以填result表示结果,要注意填复数形式.74.replace 考查动词.分析句式可知,放在情态动词can 后面需用动词原形,句意为节食和锻炼也不能代替久坐带来的消极影响.75.higher 考查比较级.分析句式可知,考查固定句型the 比较级…the 比较级.句意为看电视时间越多,死亡率越高.76.Compared 考查非谓语.句子的主语blood glucose 和compare之间是被动关系,所以用过去分词形式.77.burned 考查被动语态.根据句子,that are burned是定语从句,修饰The amount of calories,并且和burn之间是被动关系.78.Suggestions/Tips/Advice 考查名词.根据made by experts可知,针对这些问题,专家提出了一些建议.79.control 考查动词.考查固定短语,keep our all﹣important blood sugar under control 意思把…控制在内.80.help/benefit考查动词.句意为,我们应该从小的改变开始,这些小的开始会对我们有很大帮助,benefit意思是使..获益.2.Beijing Daxing Airport is Finally OpenBeijing Daxing International Airport (PKX), also known as Beijing New Airport, is the biggest airport in the world. It is also the second international airport of Beijing along with Beijing Capital International airport. Daxing Airport is located in Daxing District (the southern suburbs of Beijing). Its location was selected after thorough analysis. With a 46km﹣distance from Tiananmen Square, a 67km﹣distance from Beijing International Airport and a 26km﹣distance from Langfang City Center, Daxing Airport aims to becomethe main airport hub of the serving area. It is expected to handle up to 45 million passengers per year by 2021 and reach an outstanding 100 million in the future.How big is Daxing Airport?Daxing Airport was called "Starfish" because of its impressive shape. There is a huge terminal building (航站楼) covering a 700,000m^2 area while the ground transportation centre extends to 80,000m^2. For the time being, Daxing Airport has four runways and 79 airport stands. The 4 runways' size is impressive while the airport stands are suitable both for one twin﹣aisle (双通道) and two single﹣aisle planes. Eventually, the airport will have 7 runways in total and will be able to serve about 620,000 flights annually.Who designed Daxing Airport?The airport's design is pioneering. Its terminal building is the impressive outcome of the collaboration between ADP Ingeniérie (ADPI) and the architecture team of Zaha Hadid (ZHA) who tragically passed away in 2016. Then, in August 2018, Hong Kong design studio Lead 8 undertook the design of the new commercial terminal which is expected to respond to every passenger's needs.What are the designing advantages?Daxing Airport was designed to show high respect to environmental protection. Besides,to simplify passenger procedures, there are only less than 600 meters between checkpoints and gates and a minimum waiting time for baggage claim. Furthermore, the designers paid great attention to the convenient ground transportation system of the airport. High﹣speed and intercity trains, metro and public buses will connect the new airport to Beijing city and other major areas in a fast and efficient way.(1)What does Daxing Airport aim to?(不多于九个单词)________(2)Why is Daxing Airport called "Starfish"?(不多于五个单词)________(3)Who designed the commercial terminal?(不多于六个单词)________(4)Please write down one of the designing advantages of Daxing Airport.(不多于七个单词)________________________【答案】Becomethemainairporthuboftheservingarea, Becauseofitsimpressiveshape, Hong Kong design studio Lead 8., To show high respect to environmental protection., To simplify passenger procedures., The convenient ground transportation system.【解析】(1)Become the main airport hub of the serving area.目的意图题.根据文章第一段,The airport's design is pionee ring while its location on Daxing District (the southern suburbs of Beijing) is perfect in order to serve the Chinese capital and the neighboring areas of Hebei and Tianjin.机场的设计是一个环形,而其位于大兴区(北京南郊)的位置是完美的,以服务于中国首都北京和邻近的河北、天津地区.可知,大兴国际机场之所以会修建是为了更好的服务北京、河北以及天津.故填Become the main airport hub of the serving area.(2)Because of its impressive shape.细节理解题.根据第二段"Daxing Airport was called "Starfish" because of its impressive shape.大兴机场因其令人印象深刻的外形而被称为"海星","可知大兴机场被称为"海星"是因为它令人印象深刻的外形.故填Because of its impressive shape.(3)Hong Kong design studio Lead 8.细节理解题.根据倒数第二段" Then, in August 2018, Hong Kong design studio Lead 8 undertook the design of the new commercial terminal which is expected to respond to every passenger's needs.然后,在2018年8月,香港设计工作室领导8进行了新的商业终端的设计,预计将响应每一位乘客的需求."可知是香港设计工作室8号设计的商业航站楼.故填Hong Kong design studio Lead 8.(4)To show high respect to environmental protection.To simplify passenger procedures. The convenient ground transportation system.细节理解题.根据最后一段"Daxing Airport was designed to show high respect to environmental protection. Besides,to simplify passenger procedures, there are only less than 600 meters between checkpoints and gates and a minimum waiting time for baggage claim. Furthermore, the designers paid great attention to the convenient ground transportation system of the airport. High﹣speed and intercity trains, metro and public buses will connect the new airport to Beijing city and other major areas in a fast and efficient way.大兴机场的设计是为了体现对环境保护的高度重视,同时为了简化旅客手续,检查站和登机口之间只有不到600米的距离,行李领取的等待时间也最短,同时,设计人员也非常重视机场便利的地面交通系统机场.高速列车、城际列车、地铁和公共巴士将快速高效地将新机场与北京市及其他主要地区连接起来."可知它的优势是:尊重环境保护.简化旅客手续.便利的地面交通系统.故填To show high respect to environmental protection.To simplify passenger procedures.The convenient ground transportation system.3.My father was 44and knew he wasn't going to make it to 45.He wrote me a letter and hoped that something in it would help me for the rest of my life.Since the day I was 12and first read his letter,some of his words have lived in my heart.One part always stands out."Right now,you are pretending to be a time﹣killer.But I know that one day,you will do something great that will set you among the very best."Knowing that my dad believed in me gave me permission to believe in myself."You will do something great."He didn't know what that would be,and neitherdid I,but at times in my life when I've felt proud of myself,I remember his words and wish he were here so I could ask,"Is this what you were talking about,Dad?Should I keep going?"A long way from 12now,I realize he would have been proud when I made any progress.Lately,though,I've come to believe he'd want me to move on to what come next:to be proud of and believe in,somebody else.It's time to start writing my own letters to my children.As mothers,our children look to us with the same unanswered question we had.Our kids don't give up because they're afraid to fail.They're only afraid of________us.They don't worry about being disappointed.Their fear﹣as mine was untilmy father's letter﹣is of being a disappointment.Give your children permission to succeed.They're waiting for you to believe in them.I always knew my parents loved me.But trust me:That belief will be more complete,that love will be more real,and their belief in themselves will be greater if you write the wordson their hearts:"Don't worry; you'll do something great."Not having that blessing from their parents may be the only thing holding them back.(56).Why did the father write a letter to the author?(No more than 20words)________(57).What did the father mainly want the author to learn from his letter?(No more than 15words)________(58).According to the passage,what does the underlined word"failing"mean in English?(No more than 2words)________(59).According to the passage,how did the author overcome her fear?(No more than 10words)________(60).If your parents were to write you a letter,what would you expect to read?Give your reasons.(No more than 25words)________.【答案】failing , Becausehewoulddienextyearandwrotesomethingtohelptheauthorfortherestofherlife, He hoped his daughter could get support and confidence from his letter.,Lettingdown/Disappointing, "Her fathers letter helped her overcome the fear.", Open.(I expect my parents to give me encouragement.)【解析】(56)Because he would die next year and wrote something to help the author for the rest of her life.考查细节理解题.根据第二段的句子My father was 44and knew he wasn't going to make it to (45)He wrote me a letter and hoped that something in it would help me for the rest of my life.可知作者的父亲第二年要去世了,他写了一封信帮助作者度过以后的生活.(57)He hoped his daughter could get support and confidence from his letter.细节理解题.根据第二段的句子Knowing that my dad believed in me gave me permission to believe in myself."You will do something great."可知,作者的父亲希望女儿从信中得到支持和自信.(58)Letting down/Disappointing.词义猜测题.根据第四段的句子Our kids don't give up because they're afraid to fail.They're only afraid of failing us.可知,我们的孩子不是因为害怕失败而不放弃,而是因为害怕让我们失望.failing意为"使…失望"Lettingdown/Disappointing.(59)Her father's letter helped her overcome the fear.推理判断题.根据第四段的句子Their fear﹣as mine was until my father's letter﹣is of being a disappointment.可知,作者父亲的信克服了他的恐惧.(60)Open.本题为开放题.学生可以自由发挥,也可以依据文章的内容写:I expect my parents to give me encouragement.4.Pakistan's mud mysteryOn September 24,2013,an earthquake struck the southwest of Pakistan,taking more than 300lives and leaving hundreds of thousands homeless.But after the horri ble disaster,people living by the coast received another shock---they saw a new island,which seemed to have appeared out of nowhere,in the sea just over a kilometer from the shore,which has become a global curiosity.How was it formed in just a few minutes?As we know,islands in the sea are usually formed by volcanoes.There are many volcanoes under the sea .As the hot lava (岩浆) rushes out of the earth's crust (地壳) and cools down,it piles up and forms the shape of a mountain.When the mountain grows higher than the s ea level,the part that's above the water becomes an island.This time the island was brought about by a"mud volcano"instead of by a regular volcano.Lava is not the only thing that's locked under the earth's crust---there is also gas.When an earthquake happens and breaks part of the crust,the gas is released at an extremely high speed,pushing mud up to the surface.But only extremely powerful earthquakes can cause mud vo lcanoes to push up enough mud to produce islands---and this 7.7-magnitude earthquake in Pakistan was strong enough.The island is about 20meters high,up to about 90meters wide and 30meters long,nearly the size of a soccer field.In fact,mud volcano islands aren't new.This is the fourth island of this kind in the region since 194 5.But those islands usually didn't last long."It will probably be gone within a couple of mo nths,"said Bill Barnhart,a researcher with the US Geological Survey.After all,"it's just a big pile of mud that was on the seafloor that got pushed up".56.How many shocks did people in Pakistan receive on September 24,2013?(within 1word)________57.Where does the hot lava come from?(within 5words)________58.How does mud come above the surface of water?(within 6words)________59.When will a mud volcano island be possibly formed?(within 6words)________60.How long is the new mud volcano island likely to last?(within 3words)________.【答案】Two.,"Fromundertheearthscrust./Frominsidetheearth.(Volcanoesunderthesea.)", Itispushedupbygas., Whentheearthquakeispowerfulenough (extremelypowerful).(whenthecrustisbroken.), Afewmonths.(Severalmonths.)【解析】56.Two.细节理解题根据第一段On September 24,2013,an earthquake struck the southwest of Pakistan,taking more than 300lives and leaving hundreds of thousands homeless.But after the horri ble disaster,people living by the coast received another shock可知,在September 24,2013这一天发生了两件令人震惊的事情,故答案为Two.57.From under the earth's crust./From inside the earth.(Volcanoes under the sea.)细节理解题根据文章Lava is not the only thing that's locked under the earth's crust---there is also gas.可知,岩浆应该是来自于地球的内部,故答案为From under the earth's crust./From inside the earth.(Volcanoes under the sea.)58.It is pushed up by gas.细节理解题根据When an earthquake happens and breaks part of the crust,the gas is released at an extremely high speed,pushing mud up to the surface.可知,mud是由于地壳下的gas推上来的,故答案为It is pushed up by gas.59.When the earthquake is powerful enough (extremely powerful).(when the crust is broken.)细节理解题根据But only extremely powerful earthquakes can cause mud volcanoes to push up enough mud to produce islands---and this 7.7-magnitude earthquake in Pakistan was strong enough.可知,mud volcano island形成的条件是地震的强度需要够大才行,故答案为When the earthquake is powerful enough (extremely powerful).(when the crust is broken.)60.A few months.(Several months.)细节理解题根据."It will probably be gone within a couple of months,"said Bill Barnhart,a researcher with the US Geological Survey.可知,这种岛屿可能会在几个月内消失,故答案为A few months.(Several months.)5.Why should mankind explore space? Why should money, time and effort be spent exploring and researching something with so few apparent benefits? Why should resources be spent on space instead of on conditions and people on Earth? These are questions that,understandably, are very often asked.Perhaps the best answer lies in our genetic makeup as human beings. What drove our ancestors to move from the trees into the plains, and on into all possible areas and environments? With the wide spread of a species, human beings can get high chance of survival. Perhaps the best reason for exploring space is this genetic tendency to expand wherever possible.Nearly every successful civilization has explored, because by doing so, any dangers in surrounding areas can be identified and prepared for. Without knowledge, we may be completely destroyed by the danger. With knowledge, we can lessen its effects.Exploration also allows minerals and other potential resources to be found. Even if we have no need of them right now, they will perhaps be useful later. Resources may be more than physical possessions. Knowledge or techniques have been acquired through exploration. The techniques may have medical applications which can improve the lengthor quality of our lives. We have already benefited from other spinoffs including improvements in earthquake prediction, in satellites for weather forecasting and in communications systems. Even nonstick pans and mirrored sunglasses are byproducts of technological developments in the space.While many resources are spent on what seems a small return, the exploration of space allows creative, brave and intelligent members of our species to focus on what may serveto save us. While space may hold many wonders and explanations of how the universe was formed or how it works, it also holds dangers. The danger exists, but knowledge can help human beings to survive. Without the ability to reach out across space, the chanceto save ourselves might not exist.While Earth is the only planet known to support life, surely the adaptive ability of humans would allow us to live on other planets. It is true that the lifestyle would be different, but human life and cultures have adapted in the past and surely could in the future.【答案】Questions, rather, instinct, wider, prepared, immediately, improving, predicting, creativity, solve【解析】1. Questions.考查名词.根据第一段中的"These are questions that,understandably, are very often asked."可知,为什么探索太空,为什么把时间、金钱和精力花在没有明显益处的东西上以及为什么把资源花在太空探索上而不是地球上等这些都是常被问起的问题,故填Questions.2. rather.考查介词短语.根据第一段中的"Why should resources be spent on space instead of on conditions and people on Earth?"可知,为什么把资源花在太空探索上而不是地球上呢?rather than表示"而不是",故填rather.3. instinct.考查名词.根据第二段中的"Perhaps the best answer lies in our genetic makeup as human beings."可知,答案在于人类的基因构成,也是探索新区域和环境是人类的本能,故填instinct.4. wider.考查固定结构.根据第二段中的"With the wide spread of a species, human beings can get high chance of survival."可知,随着一个物种的广泛传播,人类有很大的生存机会,也就是传播得越广,生存机会就越大,此处为"the+比较级,the+比较级"结构,表示"越……,越……",故填wider.5. prepared.考查动词.根据第三段中的"Nearly every successful civilization has explored, because by doing so, any dangers in surrounding areas can be identified and prepared for."可知,通过探索,周围地区的任何危险都能被识别出来并做好准备,get prepared表示"做好准备",故填prepared.6. immediately.考查副词.根据第四段中的"Exploration also allows minerals and other potential resources to be found. Even if we have no need of them right now, they will perhaps be useful later."可知,探索会让我们发现矿物和其他潜在资源,即使我们不马上需要它们,将来也许会有用,故填immediately.7. improving.考查非谓语动词.根据第四段中的"The techniques may have medical applications which can improve the length or quality of our lives. "可知,这些技术可能应用于医学上,可以延长我们的寿命或提高我们的生活质量,result in后接动名词作宾语,故填improving.8. predicting.考查非谓语动词.根据第四段中的"We have already benefited from other spinoffs including improvements in earthquake prediction, in satellites for weather forecasting "可知,我们已经受益于其他附带成果,包括预报地震和天气等,result in后接动名词作宾语,故填predicting.9. creativity.考查名词.根据倒数第二段中的"While many resources are spent on what seems a small return, the exploration of space allows creative, brave and intelligent members of our species to focus on what may serve to save us."可知,虽然许多资源都花在了看似微不足道的回报上,但太空探索让我们这个物种中富有创造力、勇敢和聪明的成员能够专注于可能拯救我们的东西,此处缺少名词作主语,故填creativity.10. solve.考查动词.根据倒最后一段中的"While Earth is the only planet known to support life, surely the adaptive ability of humans would allow us to live on other planets."可知,虽然地球是目前已知唯一支持生命存在的星球,但人类的适应能力肯定会让我们能在其他星球上生存,也就是说太空探索会帮助人类解决地球上的一些潜在问题,故填solve.二、阅读理解(本大题共计5小题,每题30分,共计150分)6.阅读下面短文,完成表格。
机械自动化外文翻译外文文献英文文献运动学和轨迹规划的黄瓜采摘机器人机械手

Kinematics and trajectory planning of a cucumber harvesting robot manipulatorZhang Libin, W ang Y an, Y ang Qinghua, Bao Guanjun, Gao Feng, Xun Yi(The MOE Key Laboratory of Mechanical Manufacture and Automation, Zhejiang University of Technology, Hangzhou 310012, China)Abstract:In order to reduce cucumber harvesting cost and improve economic benefits, a cucumber harvesting robot was developed. The cucumber harvesting robot consists of a vehicle, a 4-DOF articulated manipulator, an end-effector, an upper monitor, a vision system and four DC servo drive systems. The Kinematics of the cucumber harvesting robot manipulator was constructed using D-H coordinate frame model. And the inverse kinematics which provides a foundation for trajectory planning has been solved with inverse transform technique. The cycloidal motion, which has properties of continuity and zero velocity and acceleration at the ports of the bounded interval, was adopted as a feasible approach to plan trajectory in joint space of the cucumber harvesting robot manipulator. Moreover, hardware and software based on CAN-bus communication between the upper monitor and the joint controllers have been designed. Experimental results show that the upper monitor communicates with the four joint controllers efficiently by CAN-bus,and the integrated errors of four joint angles do not exceed four degrees. Probable factors resulting in the errors were analyse and the corresponding solutions for improving precision are proposed.Keyword:cucumber harvesting robot, articulated manipulator, trajectory planning, cycloidal motion, CAN-busDOI:10.3965/j.issn.1934-6344.2009.01.001-007Citation:Zhang Libin, Wang Y an, Yang Qinghua, Bao Guanjun, Gao Feng, Xun Yi. Kinematics and trajectory planning of a cucumber harvesting robot manipulator. Int J Agric & Biol Eng, 2009; 2(1): 1-7.1 IntroductionFruit and vegetable harvesting is a labor-intensive job,and the harvesting cost by human labor is about 33%~50% of the total production cost[1]. Therefore, it isurgent to mechanize and automate fruit and vegetable harvesting. Currently, many countries are studying.Received date: 2008-11-20 Accepted date: 2009-03-28Biographies:Zhang Libin, professor, Ph.D, mainly engaged in agricultural robot, mechatronics and control. Wang Y an, Ph.D candidate of Zhejiang University of Technology, ma inly engaged in robotics, intelligent instruments. Y ang Qinghua, professor, Ph.D, mainly engaged in robotics, mechatronics and control. Baoguanjun, lecturer, Ph.D, mainly engaged in robotics, control and machine vision. Gao Feng, associate professor, Ph.D, mainly engaged in electromechanical engineering. Xun Yi, Ph.D, mainly engaged in vision system and image processing. Corresponding author:Zhang Libin, MOE Key Laboratory of Mechanical Manufacture and Automation, Zhejiang University of Technology, Hangzhou 310012, China. Tel & fax: +86-571-88320007. Email: **************.cnharvesting robot, especially Netherlands and Japan. Some of the harvesting robots, such as cucumber, tomato, grape harvesting robots have been applied in greenhousesand others on farms[2,3]. In China, though research on harvesting robot is later than that in developed countries,some favorable achievements have been made through efforts in many universities and research institutes, such as the eggplant picking robot designed by China Agricultural University and the tomato harvesting robot developed by Zhejiang University.Under the support of the National High-Tech Research and Development (863) Program of China(2007AA04Z222), the first systematical cucumber harvesting robot in China was jointly developed by China Agricultural University and Zhejiang University of Technology. It consists of a vehicle, a 4-degree of freedom (DOF for short) articulated manipulator, an end-effector, an upper monitor, a vision system and four DC servo drive systems. Instead of utilizing an industrial manipulator, the 4-DOF articulated manipulator was designed by Zhejiang University of Technology to reduce the cost and adapt to the harvesting environment.This paper mainly investigates the 4-DOF articulated manipulator kinematics and trajectory planning, and it is outlined as follows. In Section 1, the structure of cucumber harvesting robot manipulator is described. The kinematics of manipulator is constructed in Section 2 and the inverse kinematics is solved in Section 3. Section 4 presents the trajectory planning algorithm of cycloidal motion. The hardware and software design of trajectory planning based on CAN-bus is introduced in Section 5. Experiments measuring actual position of four joints are carried out and possible causes for errors are analyzed in Section 6. Finally, conclusions are drawn in Section 7.2 Cucumber harvesting robot manipulator structureThis paper describes in detail the kinematics of the robot manipulator and realization oftrajectory planning control based on CAN-bus. The line diagram and photograph of the articulated manipulator is shown in Figure 1. It is composed of four rotation joints: waist joint (J1), shoulder joint (J2), elbow joint (J3) and wrist joint (J4). One end is fixed on the base, and the other end is connected to an end-effector which contains two parts: a gripper to grasp the fruit and a cutting device to separate the fruit from the plant.Figure 1 Line diagram and photograph of the cucumber harvesting robot manipulator The cucumber harvesting robot system employs multi-CPU, distributed control structure of upper monitor and joint servo controllers. Moreover, the four joints are driven to work in perfect harmony by CAN-bus communication which efficiently supports the distributed real-time control system. The communication system ofthe cucumber harvesting robot is shown in Figure 2. The Upper monitor is used to monitor and manage the whole robot system, locate cucumber target, and plantrajectory. The CAN-bus is the transmission bridge between upper monitor and joint controllers. The servo controllers are distributed in each joint to drive torquemotors and they can realize close-loop control by receiving feed back signals from angle encoders.Figure 2 Communication system of the cucumber harvesting robot3 Coordinate frames of kinematics modelsCoordinate frames of kinematics models are constructed by Denavit-Hartenberg model (D-H for short), which has been widely adopted in robotics due to its explicit physical interpretation of mechanisms and relatively easy implementation in the programming of the robot manipulator. D-H coordinate frame model is based on assignment of Cartesian coordinate frames fixed relative to each link of robot manipulator. And it describes spatial transformation between two consecutive links by 4×4 transformation matrix i-1A i, so the transformation of link n coordinate frame into the basecoordinate frame can be written as[4,5]:where a is the vector of approaching direction; 0 is orientation vector,n = a×0 is thenormal vector;P is the position vector of end-effector relative to thebase coordinate frame.The D-H transformation matrix i-1A i r elating to a number of rotations and translations between two consecutive coordinate frames is expressed as[6,7]:Where θi is joint angle;αi is twist angle;d i is joint offset;a i is the length of link.Figure 3 illustrates the D-H coordinate frames of the robot manipulator and Table 1 summarizes its D-H parameters.Figure 3 D-H coordinate frames of the cucumber harvesting robot manipulatorTable 1 D-H parameters of the robot manipulator4 Inverse kinematics of the cucumber harvesting robot manipulatorThe inverse kinematics problem for a robot manipulator is to find a vector of joint variables that produces a desired end-effector position and orientation.The inverse transform technique is used to solve the problem[8,9]. In order to pick cucumbers conveniently, the wrist joint has to be parallel to X axis of the base coordinate frame, so it can be obtained:θ2 + θ3 +θ4 = 0°For equation (1), it can be rewritten as:WhereFirst, let element (3,4) of matrix (4) and (5) be equal,θ1 can be given by:Then let element (1, 4) and (2, 4) of matrix (4) and (5) be equal, the following equations can be obtained:By simplifying equation (7):From equation (7), θ2, θ3 can be expressed as:5 Trajectory planning in joint space based oncycloidal motionTrajectory planning of the robot manipulator is defined in this way: find temporal motion laws for joint position, velocity and acceleration according to a given operation of the end-effector. The motion laws generated by trajectory planner have to use some particular strategies to eliminate extra movements such as chattering and resonance. They have to be smooth enough, and continuous for their first and second derivatives[10,11]. Within a number of planning algorithms, cycloidal motion is especially suitable to apply in point-to-point trajectory planning because of its smaller amount of calculation, smoothness and continuity,and features of zero velocity and acceleration at the initial and end points of the bounded interval[12]. Its motion curve can be described as[13]:Then its first and second derivatives can be expressed as:Whereis normalized time;T is a single harvest operation time.Figure 4 shows the curves of the cycloidal motion andits first and second derivatives in canonical interval (-1,1). From Figure 4, it can be clearly seen that the cycloidal motion is adequately smooth; also, the velocity and acceleration motions are continuous and the values atFigure 4 Cycloidal motion and its first and second derivatives the initial and end points of interval 0≤τ ≤1 are zeros.This demonstrates that the motion of the end-effector of robot manipulator won’t result chattering, so it can ensure motion stability of the robot system.For joint i , trajectory planning relies on position and orientation of end-effector. So, the first step of trajectory planning is acquiring the three dimensional space description of the target cucumber. This description is based on sensory information such as machine vision as well as priori knowledge aboutkinematics structure of robot manipulator. Then the goal angles q i(f) of the four joints can be obtained from the target position of the end-effector with inverse kinematics (Eqs 6, 10, 12, 13). After the start joint angles q i(0) i q being sent from joint controllers through CAN-bus, the position, velocity, acceleration equations based on cycloidal motion can be expressed as:6 Hardware and software design of trajectory planning based on CAN-bus6.1 Interface circuit of CAN-busController Area Network (CAN) is an advanced serial communication protocol for distributed real-time control system. Different devices such as processors, sensors and actuators can be connected to CAN-bus via twisted-pair wires and can communicate with each other by exchanging messages. The maximum transmissionrate can reach up to 1Mbps in a noisy environment. And it utilizes Carrier Sense MultipleAccess with Collision Detection (CSMA/CD) as the arbitration mechanism to enable its attached nodes to have access to the bus[14-16].The cucumber harvesting robot system employs the point to multi-points communication of CAN-bus. The upper monitor and four joint controllers are composed of dsPIC30f4012 digital signal processor which contains standard CAN controller and MCP2551 transceiver. And a 4-wire interface is designed based on CAN-bus protocol(CAN2.0A), which provides power, ground and two data lines(CAN High and CAN Low). The interface circuit of CAN-bus is shown in Figure 5. And the upper monitor circuit board is shown in Figure 6. The Baudrate of CAN-bus communication is adopted 1Mbps, and the messages transmitted consist of 2-byte identifier, 1-byte data length and 8-byte data. Messages are transmitted with a time internal of 10 ms according to the harvesting requirements. CAN-bus communication exhibits good real-time performance in practical application.Figure 5 Interface circuit of CAN-busFigure 6 Upper monitor circuit board6.2 Software design for trajectory planning of the cucumber harvesting robotThe upper monitor has functions of management and supervision for the robot system, location of cucumber target and trajectory planning. The program designemploys the modularization idea which is composed of several subprograms. Figure 7 illustrates the process of the trajectory planning for the cucumber harvesting robot. It consists of subprograms such as CAN-bus sending and receiving, acquisition of cucumber target, inverse kinematics and trajectory planning.Figure 7 Flow chart for the trajectory planning7 Experiments and analysisIn order to verify the accuracy of the trajectory planning algorithm and CAN-bus communication, experiments to measure the actual position of the fourjoints of the cucumber harvesting robot manipulator were performed with the coordinate measurement machine(CMM) Platinum FaroArm of FARO Technologies Incorporation. As the world’ s best-selling portable measurement arm, Platinum FaroArm is available in sizes ranging from 1.2 m to 3.7 m and has precision of up to 0.013 mm.Experiments were carried out as follows:1) Set the position of the end-effecor:P x = 700mm, P y = 200mm, P z = 668mm . By utilizing the inverse kinematics, the four joint angles can be computed fromequation (6) ~(13):θ1 =15.95°,θ2 =55.82 °,θ3 =-33.48°,θ4 =-22.34°.2)Plan trajectories for each joint with cycloidal motion algorithm and send the planned angle messages to joint controllers by CAN-bus.3)Use Platinum FaroArm to measure the actual angles that torque motors have rotated.4)Set other 9 positions of end-effector, repeat (1)~(3) steps. Experimental results are presented in Table 2.Experimental results in dicate that the integrated errors of four joint angles didn’ t exceed four degrees. The possible reasons for experimental errors are: (1) controlling precision of single joint is 0°~1°;(2) mechanical structure error including installation and deformation error;(3) the end-effector hadn’ t realized closed-loop position control. The corresponding solutions are:(1) add some compensation algorithm to improve control precision of single joint;(2) substitute Aluminum alloy for PVC to manufacture the manipulator to decreasemechanical error;(3)mount a mini camera on the end-effector to realize the close-loop control of manipulator. Table 2 Experimental results on measuring actual position of the four joints of robot manipulator8 Conclusions1)Kinematics of the cucumber harvesting robot manipulator was constructed using D-H coordinate frame model. The inverse kinematics, which provides a foundation for trajectory planning, has been solved with inverse transform technique.2)The cycloidal motion, which has properties of continuity, small amount of calculation, and zero velocity and acceleration at the ports of the bounded interval, is proposed as a feasible approach to plan trajectory in joint space of the robot manipulator.3)Software and hardware of CAN-bus communication between the upper monitor and the joint controllers have been designed.4) Experimental results show that the upper monitor communicated with four joint controllers efficiently by the CAN-bus, and the integrated errors of four jointangles were less than four degrees.AcknowledgmentThis work is supported by the Natural Science Foundation of China (50575206) and the National High-Tech Research and Development (863) Program of China (2007AA04Z222).[References][1] Tang Xiuying, Zhang Tiezhong. Robotics for fruit and vegetable harvesting: a review. Robot, 2005; 27(1): 90-96.[2] E. J. Van Henten, J. Hemming, B.J.A Van Tuijl so on. Collision-free motion planning for a cucumber picking robot. Biosystems Engineering, 2003; 86(2): 135-144.[3] Arima S, Kondo N. Cucumber harvesting robot and plant training system. Journal of Robotics and Mechatronics,1999; 11(3): 208-212.[4] Xiong Youlun. Robotic technology. Wuhan: Huazhong University of Science and Technology Press, 1996; pp. 18-22.[5] M.Abderrahim, A.R.Whittaker. Kinematic model identification of industrial manipulator. Robotics and Computer Integrated Manufacturing, 2000; 16: 1-8.[6] Chen Ning, Jiao Enzhang. A new scheme for solving the inverse kinematics equations of PUMA robot manipulator. Journal of Nanjing Forestry University. 2003; 27(4): 23-26.[7] Fu Jingxun. Robotics. Beijing: China Science and Technology Press, 1989; pp.26-36.[8] Wang Ping, Yang Yanping, Deng Xiao. Study on the motion control of mold polishing robot system. China Mechanical Engineering, 2007; 18(20): 2422-2424.[9] Anatoly P. Pashkevich, Alexandre B. Dolgui. Kinematic aspects of a robot-positioner system in an arc welding application. Control Engineering Practice, 2003; 11: 633-647. [10] Neelam R Prakash, Kamal T S. , Intelligent planning of trajectories for pick-and-place operations. In: Proc. Of International Conference on System, Man and Cybernetics.2000; 55-60.[11] A. Gasparetto, V. Zanotto. A new method for smooth trajectory planning of robot manipulators. Mechanism and Machine Theory, 2007; (42): 455-471.[12] Zhuang Peng, Yao Zhengqiu. Trajectory planning of suspended-cable parallel robot based on law of cycloidal motion. Mechanical Design, 2006; (9): 21-24.[13] Jorge Angeles. The principle of robotic mechanic system. Beijing: Mechanical Industry Press, 2004; 141-148.[14] Hofstee J W, Goense D. Simulation of a CAN-based tractor implement field bus according to DIN 9684. Journal of Agricultural Engineering Research, 1999; 73(4):383—394.[15] Yang Xianghui. Industrial communication and control network. Beijing: Tsinghua University Press, 2003. pp. 84-85.[16] Navet N, Song Y Q. Reliability improvement of the dual-priority protocol under unreliable transmission.Control Engineering Practice, 1999; (7): 975-981.运动学和轨迹规划的黄瓜采摘机器人机械手张利兵、王雁、杨庆华、宝冠君、高锋、薰易(教育部重点实验室的机械制造及自动化、浙江理工大学、中国杭州310012)摘要:为了降低成本,提高黄瓜收获经济效益,黄瓜收获机器人得以发展。
presentation

Fig. 2
01
1) NIR Imaging
02
03
2) US Imaging
3) Force Sensing
Two arrays of 940 nm light-emitting diodes provide NIR illumination, which allows blood vessels up to 4 mm in depth to be visualized
First, the mechanical configuration of the thirdgen system is completely redesigned to incorporate the added DOF without compromising portability. Second, the NIR, US, and needle insertion subsystems are integrated into a compact endeffector unit. Third, a force sensor is coupled to the motorized needle insertion mechanism as an added method of feedback during the venipuncture.
The device runs off a laptop computer (i7-4710HQ 2.5 GHz CPU) serving as the host processor, communicating with theactuators and sensors via a USB bus.
by 马春杰
medical robots have played a key role over the past decade in assisting health care practitioners to perform a wide range of clinical interventions . the robot’s performance depends heavily on its ability to obtain accurate information about the spatial positioning of the tools and the target. One clinical application in which positioning feedback is especially important is percutaneous needle insertion
Obstacle Detection and Tracking Robot Safety

Obstacle Detection and Tracking Robot Safety As an obstacle detection and tracking robot, safety is of utmost importance in ensuring the well-being of both the robot itself and the people and objects around it. In this response, I will address the various aspects of safety that need to be considered in the design and operation of such a robot, as well as the measures that can be taken to mitigate potential risks.First and foremost, the physical design of the robot plays a crucial role in ensuring safety. The robot should be equipped with sensors that enable it to detect obstacles in its path and react accordingly to avoid collisions. These sensors could include cameras, ultrasonic sensors, LIDAR, and radar, among others. Additionally, the robot should be built with sturdy and durable materials to withstand potential collisions and to prevent any parts from becoming hazards themselves.Furthermore, the software and algorithms that govern the robot's behavior are equally important in ensuring safety. The robot should be programmed to prioritize the safety of humans and other living beings, as well as the protection of property. This means that the robot should be able to make split-second decisions to avoid collisions and to navigate around obstacles in a way that minimizes risk.In addition to the physical and software aspects of safety, it is also important to consider the ethical implications of deploying such a robot in various environments. For example, in a busy public space, the robot should be programmed to prioritize the safety and well-being of pedestrians, even if it means taking a longer route or waiting for an opportune moment to pass. This requires a careful balance between efficiency and safety, and it is important to consider the potential consequences of the robot's actions in different scenarios.Another important aspect of safety to consider is the potential for human error in the operation of the robot. While the robot may be equipped with advanced sensors and algorithms, there is still a possibility for accidents to occur if the robot is not operated properly. This could be due to a lack of training, negligence, or technical malfunctions.Therefore, it is crucial to provide comprehensive training to the operators of the robot and to implement fail-safes and emergency protocols in the event of a malfunction.Moreover, the robot should be designed with the ability to communicate its intentions and actions to the people around it. This could be done through visual indicators, such as lights or displays, as well as auditory signals, such as beeps or spoken messages. By providing clear and easily understandable signals, the robot can help to mitigate potential risks and avoid misunderstandings or accidents.Lastly, it is important to regularly assess and update the safety measures and protocols associated with the robot. As technology advances and new challenges arise, it is crucial to stay ahead of potential risks and to continuously improve the safety features of the robot. This could involve conducting regular risk assessments, gathering feedback from stakeholders, and implementing new technologies or protocols as they become available.In conclusion, the safety of an obstacle detection and tracking robot is a multifaceted issue that requires careful consideration of physical, software, ethical, human, and communicative aspects. By addressing these various perspectives and implementing comprehensive safety measures, it is possible to mitigate potential risks and ensure the safe operation of such a robot in various environments.。
Grasping Force Control Robot Hand Precision

Grasping Force Control Robot Hand Precision Developing a robot hand with precise grasping force control is a complex and challenging task that requires a multidisciplinary approach. This problem is particularly important in the field of robotics, as it directly impacts the ability of robots to interact with objects in a human-like manner. In this response, I will explore the technical, practical, and ethical implications of developing a robot hand with precise grasping force control, as well as the potential benefits and drawbacks of such technology.From a technical perspective, achieving precise grasping force control in a robot hand involves a combination of mechanical design, sensor technology, and control algorithms. The mechanical design of the hand must allow for a wide range of motion and dexterity, while also providing the strength and stability necessary to grasp objects of varying shapes and sizes. Additionally, the hand must be equipped with sensors capable of detecting the force being exerted on an object, as well as the ability to adjust the grasping force accordingly. This requires advanced sensor technology and sophisticated control algorithms to interpret and respond to the sensory input in real time.Practically speaking, a robot hand with precise grasping force control has the potential to revolutionize a wide range of industries, from manufacturing and logistics to healthcare and home assistance. In manufacturing, for example, robots with this capability could handle delicate or complex tasks that are currently performed by human workers, leading to increased efficiency and safety in the workplace. In healthcare, robot hands with precise grasping force control could assist surgeons in performing minimally invasive procedures with greater accuracy and control. In the home, this technology could enable robots to assist individuals with disabilities or age-related limitations in performing everyday tasks, thereby improving their quality of life.However, the development of a robot hand with precise grasping force control also raises ethical considerations regarding the potential impact on the workforce. As robots become more capable of performing tasks that were previously exclusive to humans, there is a risk of job displacement and economic inequality. It is important to consider how this technology can be implemented in a way that benefits society as a whole, rather thanexacerbating existing social and economic disparities. Additionally, there are ethical implications related to the use of such technology in healthcare and other sensitive areas, including the need to ensure patient safety and privacy.In conclusion, the development of a robot hand with precise grasping force control presents both exciting possibilities and significant challenges. From a technical perspective, it requires a combination of advanced mechanical design, sensor technology, and control algorithms. Practically, it has the potential to revolutionize industries and improve the quality of life for individuals. However, it also raises ethical considerations related to its impact on the workforce and its use in sensitive areas such as healthcare. As researchers and developers work to overcome these challenges, it is essential to consider the broader implications of this technology and ensure that it is implemented in a way that benefits society as a whole.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. INTRODUCTION
In this paper a visual tracking system of a robot hand is presented. The purpose is to track a robot hand by a vision system while the robot is making different tasks. We use a camera that can be controlled remotely (pan, tilt and zoom can be changed). Through the image acquired by the camera we can control the camera parameters taking into account that the robot hand will be always in the center of the image. To accomplish this process we can divide it in several steps. In a first step we must to estimate the pose of the robot hand studying the acquired image. In a second step and using the information stored about some previous positions, the next position is predicted to command the camera. In a third step, control action is calculated from the adaptive fuzzy controller and the camera is moved to track the object, in the fourth and final step, the adaptive parameters are calculated to be changed if its necessary.
carlos.perez@umh.es
o.reinoso@umh.es ABSTRACT
suni@umh.es
This paper presents an algorithm to track an industrial robot hand during its movement. Based on acquired image and knowing the robot hand model, the pose is obtained. This information is used to move a pan-tilt camera and keep the robot hand centered in the image every time using an adaptive fuzzy logic controlled. This control law is used combined with a position prediction technique to improve the system behavior. Vision based systems have a lot of empirically adjustable parameters for a good working. With the algorithm proposed in this paper, the adjustable parameters are minimum, so the system robustness is increased.
Robot hand visual tracking using an adaptive fuzzy logic controller
Carlos Pérez
Industrial System Engineering Department Miguel Hernández University Avda. del Ferrocarril S/N Elche-Alicante (Spain)
Oscar Reinoso
Industrial System Engineering Department Miguel Hernández University Avda. del Ferrocarril S/N Elche-Alicante (Spain)
M. Asuncióቤተ መጻሕፍቲ ባይዱ Vicente
Industrial System Engineering Department Miguel Hernández University Avda. del Ferrocarril S/N Elche-Alicante (Spain)
2. POSE ESTIMATION
The pose estimation algorithm obtain the pose of an object from a single image, based on a 3D target model. There are multiple procedures for object position and orientation estimation in a well-known
three-dimensional space geometry, modification of Lowe’s pose estimation algorithm, pose estimation using coplanar points, DeMenthon modification algorithm and pose estimation using quadrangular targets. We have used the DeMenthon algorithm [Dem01] to estimate the pose of the robot hand. This algorithm provides pose estimation obtained by a number of markers (significative points over the robot hand). So it is necessary to have several markers on it. Once these markers have been identified in the image we can estimate the pose of the robot hand taking into account the model and the real position of the markers in this hand. Several points have been chosen on the robot hand to use them as significative points (landmarks). The DeMenthon algorithm requires to identify at least four non coplanar markers to estimate de pose of the object, that is named the “perspective four-point problem” or P4P. Once the markers have been identified, coordinates of this points are introduced in the DeMenthon algorithm. This algorithm returns the rotation matrix and the translation vector that relate the camera coordinate system with robot hand coordinate system (pose). The accuracy of the estimated pose will depend on the relative distance between the markers identified. In our experiments we have concluded that the relative distance between the markers must be 10 cm or more for a good working.
Keywords
Tracking, computer vision, fuzzy control, applications. Most of the available tracking techniques can be divided in two main classes: feature-based and model-based. Feature-based techniques are based on using geometric primitives (points, segments, circles, …), object contours, interesting regions, to track the object in the space [Mar00]. However, model-based techniques are based on the knowledge of the model to track the object. This model can be a CAD-model or a 2D representation. This option give a more robust solution for tracking (i.e., can run properly with partial object occlusion) [Bro00]. We have adopted the model-based scheme for this work. In this way in Section 2 we present the algorithm used to estimate the pose of the robot hand. To estimate the pose of the robot hand we must to calibrate the vision system to know the intrinsic parameters. In Section 3 we present the calibration method employed. In Section 4, the technique used to predict the position of the robot hand is explained. In Section 5, we present the adaptive fuzzy control law, core of this paper. In Section 6, the experimental results are presented and finally the Section 7 is for the conclusions. (see Section 8 for acknowledgement and section 9 for references).