轮07级轮机自动化教案第七章
《轮机自动化》

中国海洋大学本科生课程大纲课程属性:公共基础/通识教育/学科基础/专业知识/工作技能,课程性质:必修、选修一、课程介绍1.课程描述:《轮机自动化》是轮机工程技术专业的主要专业课程之一。
课程的教学任务是使学生掌握自动控制原理、自动化仪表、船用辅助设备的自动控制、参数的巡回检测与集中监视、主机遥控、微型计算机在船舶上应用的基础知识;无人机舱主要设备的日常管理方法和技能;为培养具有一定解决问题能力的轮机自动化工程技术人员打好基础。
2.设计思路:(1)自动控制原理自动控制系统的基本概念,对自动控制系统的基本要求,调节对象的特性,控制系统的传递函数,基本作用规律。
重点:自动控制系统的基本概念,对控制系统的要求,调节对象的动态特性和时间常数、容量和容量系数,比例调节(P)、比例积分(PI)调节和比例积分微分(PID)调节规律。
(2)自动控制系统的分析控制系统的阶跃响应,控制系统稳定性和稳定判据,自动控制系统整定。
重点:控制系统的阶跃响应。
(3)自动化仪表自动化仪表的基础知识,自动化仪表常用元件,气动变送器,气动执行器的调试与参数整定及常见故障分析和排除。
其它常用调节器、气动辅件、气动显示仪表、气动执行机构及电动仪表的基本知识。
重点:变送器及变送器的迁移和量程调整原理,比例积分调节器,比例积分微分调节器,气动仪表的调试和调节器的参数整定,气动调节器的常见故障及排除方法。
选做实验一:气动差压变送器及气动调节器的调试。
选做实验二:自动控制系统的参数整定。
要求:能够掌握气动差压变送器及气动调节器的调试与参数整定的原则和基本方法。
(4)自动控制系统实例主机气缸冷却水温度自动控制系统;VAF主机燃油粘度自动控制系统。
重点:VAF燃油粘度控制系统。
(5)辅助机械设备的自动控制分油机程序控制及管理;辅助锅炉水位和蒸汽压力的自动控制,辅助锅炉燃烧时序的自动控制,油水分离器的自动控制。
选做实验三:辅锅炉燃烧的程序控制。
要求:通过实验掌握分油机程序控制的方法,学会基本操作,判断及排除故障的能力,掌握辅锅炉燃烧程序控制的基本原理。
轮机维护与修理 第七章(培训教材)

断头螺栓顶面锯出小槽,螺丝刀旋出;挫平断头螺栓两侧面,扳手拧出;断 头螺栓焊折角钢杆或螺母,旋出;断头螺栓顶面钻孔反向螺丝、拧入螺 钉,拧出螺钉带出;选直径<断头螺栓根圆直径0.5~1.0mm钻头,将螺 栓钻掉,再用与原螺栓螺距相同的丝锥将螺纹孔中残存断头螺栓除去, 但应不损坏原螺纹孔的精度。
重庆交通大学航海学院
轮机维护与修理
ChongQing JiaoTong University
1 船机拆卸
5
1.1 拆卸原则 1.2 拆卸的准备工作 1.3 拆卸方法
重庆交通大学航海学院
轮机维护与修理
ChongQing JiaoTong University
1.1 拆卸原则及要求
6
1)拆卸前须先弄清楚构造和工作原理 2)确定拆卸范围: 由勘验检测的故障,确定范围。 3)正确拆卸顺序: 遵循从上到下、从外到里;先拆附属件、易损件,后拆主要机件;先拆部件,
ChongQing JiaoTong University
Chapter 7 船机维修过程
• 船机损坏后的维修:船员自修、进厂修理 • 船机维修过程为:
航行勘验 拆卸(检测) 清洗
检测 确定修理方案及修理 装复(检测)
试车 系泊试验、航行试验 可知: • 检测贯穿修理前、后拆卸与装复过程中。 • 通过拆卸和拆卸中的检验、测量,摸清故
勘验 象, 初步确定存在的问题。
•观察:观察拆开配合件工作面,从表面氧化、变色、拉毛、擦伤、 腐蚀、变形和裂纹等现象,判断故障部位、范围和程度。
2.2 拆
卸
•测量:测量零件尺寸→计算磨损量、几何形状误差和配合间隙等, 判断零件磨损、腐蚀或变形程度。例测量缸套内径、曲轴外径绝
《轮机自动化》课程教学大纲

《轮机自动化》课程教学大纲一、课程基本信息1、课程代码:NA4012、课程名称(中/英文):轮机自动化 / Marine Automation3、学时/学分:43/2.54、先修课程:船舶主机、船舶辅机、船舶动力装置控制理论5、面向对象:轮机工程6、开课院(系)、教研室:船建学院船舶与海洋工程系7、教材、教学参考书:教材:轮机自动化,万曼影,上海交通大学出版社,2007年8月教学参考书:船舶动力装置自动化,赵国光,上海交通大学出版社轮机自动化,郑凤阁,大连海事大学出版社二、课程性质和任务轮机自动化是船舶与海洋工程专业轮机工程方向本科生的必修课程,内容涉及电子学、自动控制、仪器仪表、微机控制等学科的知识,是培养具备机电一体化知识复合人材的必备环节。
轮机自动化是船舶自动化的核心,它是一门综合学科,着重于实际系统的应用。
学习本课程后,可掌握船舶动力装置自动化各重要环节的组成和工作原理,为以后学生从事船舶动力装置及自动化的设计打下基础。
本课程各教学环节对人才培养目标的贡献见下表。
三、教学内容和基本要求本课程包括了自动控制、仪表、轮机系统参数自动控制、主机遥控、监视报警等多方面知识。
力求理论与实践相结合,气动控制与电动控制相结合,常规控制与计算机控制相结合,并介绍轮机自动化的最新发展。
第一章轮机自动化基础知识第一节反馈控制的基本概念一、自动控制的基本方式二、反馈控制系统的概念三、反馈控制系统的基本性质四、复合控制系统第二节控制对象的特性一、单容对象的特性二、双容对象的特性三、多容对象的特性第三节调节器的作用规律一、双位式调节规律二、比例调节规律三、积分调节规律四、比例积分调节规律五、比例微分调节规律六、比例积分微分调节规律第四节调节器参数的实验整定方法一、稳定边界法二、反应曲线法三、衰减曲线法四、三种整定方法的比较第二章船用自动化仪表第一节自动化仪表的基本知识一、自动化仪表的主要品质指标二、气动仪表的基本部件三、气动仪表的组成原理第二节 PID调节器一、比例积分调节器二、气动微分调节器三、电子PID调节器第三节执行器一、气动执行器二、电动执行器三、阀门定位器四、电-气转换器第三章参数的自动控制系统第一节柴油机冷却水温度自动控制系统一、直接作用式冷却水温度控制系统二、电动作用式冷却水温度控制系统第二节燃油粘度自动控制系统一、VAF燃油粘度控制系统二、VISCOCHIEF燃油粘度控制系统第三节辅助锅炉的自动控制一、辅助锅炉水位的自动控制二、辅助锅炉燃烧的时序程序控制第四章机舱集中监视与报警系统第一节机舱报警监视概述一、基本概念二、检测传感器三、机舱检测与报警系统四、报警的延伸第二节柴油机工况监视一、曲柄箱油雾浓度检测装置二、柴油机工况的微机检测装置第三节巡回检测一、常规巡回检测装置二、微机控制的巡回检测装置第四节网络型监视与报警系统一、功能和组成二、CAN总线协议与CAN控制器三、基于CAN总线的网络监控系统第五章柴油机主机遥控系统第一节主机遥控的基础知识一、主机遥控的基本概念二、常见气动阀件及气源装置第二节柴油机主机气动遥控系统一、起动逻辑回路二、换向与制动逻辑控制三、主机转速和负荷控制第三节 AC-4主机遥控系统一、AC-4主机遥控系统的组成二、AC-4主机遥控系统的工作原理第四节AC C20主机遥控系统一、AC C20主机遥控系统的组成二、AC C20主机遥控系统的工作原理四、实验(上机)内容和基本要求双容水位控制实验,计算机巡回检测演示实验。
轮机自动化7

图11-6 感烟管式火灾探测器
图11-7 离子式火灾探测器
图11-8 感温式火灾探测器
手动报警按钮的外形及内部线路
定温式火灾探测器外观与双金属片结构图
机械式差定温火灾探测器的外观与结构示意图
电子式差定温火灾探测器的内部结构及工作电、 干货舱自探火及报警系统 (一)系统的基本组成 (二)KIDDE型干货舱自动探火及报警系统 1.启动前的准备 2.系统工作过程 3.自检功能
3)故障
图10-1 机舱 监视与报警系 统的组成
图10-2 监测 点与报警处理 流程图
1)长延时报警(2-30S) 2)短延时报警(0.5S) 5. 报警闭锁 6.延伸报警 1)无人机舱设置 2)按严重程度分组 (1)主机故障自动停车报警 (2)主机故障自动降速报警 (3)重要故障报警 (4)一般故障报警 7.失职报警(3min) 8.值班呼叫 9.测试功能
图中右侧上方小按钮为主按钮组,下方大按钮为二级按钮组。 在主按钮组中,点击“收藏夹(FAVORITES)”可进行值班轮机员 的个性显示及其管理,点击“列表查看(LIST VIEWS)”可以列 表的形式查看监视参数,点击“显示配置(CONFIG DISPLAYS)” 可对各种显示进行自定义配置,进入“服务(SERVICE)”菜单可 显示系统信息、说明书查阅、背景亮度调节和报警测试等,进 入“值班(WCALL ENGINE)”菜单可操作对值班呼叫系统,进入 “系统总览(SYS.OVERVIEW)”可查看整个系统的网络布局及网 络工作状态(若采用了AC-C20主机遥控系统,则在这里还将显示 AC C20的网络结构,并可对主机遥控系统的参数进行设置)。 “主机总览(MEOVER VIEW)”、“火警系统(FIRE SYSTEM)”、 “发电机总览(A/E OVERVIEW)”、“燃滑油系统(FO&LO SYSTEM)”、“海淡水系统(SW/FW SYSTEM)”和“泵与风机总览 (PUMP&FAN OVERV)”等则以mimic图的形式显示相应系统的工作 状态。
轮机自动化基础课程设计

轮机自动化基础课程设计设计目的本课程设计旨在通过理论学习和实践操作,使学生了解和掌握船舶轮机自动化的基本原理和实现方法,达到以下目的:1.了解船舶轮机自动化系统的组成和工作原理;2.掌握船舶轮机自动化控制系统的基本原理和方法;3.理解船舶轮机自动化系统的安全保护和故障诊断方法;4.能够编写轮机自动化控制程序,实现基本的控制功能。
设计内容第一章:轮机自动化系统的基本概念和组成1.轮机自动化系统的概念和分类;2.轮机自动化系统的组成和主要元器件介绍;3.轮机自动化系统的总体功能和性能要求。
第二章:船舶主机控制系统1.船舶主机控制系统的组成和工作原理;2.海水缸配平控制系统的原理和控制方法;3.舵机同步和偏舵控制的原理和方法。
第三章:船舶辅机控制系统1.船舶辅机控制系统的组成和工作原理;2.发电机控制系统的原理和控制方法;3.压缩空气系统控制的原理和方法。
第四章:船舶自动化系统的应用1.船舶自动化系统在船舶操作中的应用;2.船舶自动化系统的优势和不足;3.船舶自动化系统维护和故障处理方法。
实验安排1.实验一:PLC编程基础实验;2.实验二:船舶主机控制实验;3.实验三:船舶辅机控制实验;4.实验四:船舶自动化系统故障诊断实验。
总结本课程设计主要介绍了船舶轮机自动化系统的组成、工作原理及其应用。
通过理论学习和实践操作,使学生了解和掌握了自动化控制系统的基本原理和方法,能够运用PLC等编程工具编写控制程序,实现基本的控制功能。
船舶轮机自动化技术是现代船舶的重要部分,对提高船舶运行效率和安全性具有重要意义。
通过本课程的学习,学生将为今后从事相关职业奠定坚实的基础。
大学轮机自动化基础教案

大学轮机自动化基础教案
一、教学目标
本教学要求,通过大学轮机自动化基础课程的学习,学生能够深入了解轮机系统的基
本原理和性能,能够熟练运用电子技术、控制技术、信息技术等手段进行轮机的设计、维护、管理和控制。
二、教学内容
1. 轮机自动化控制系统
2. 轮机电子技术
3. 主机、辅机和配套设备的自动化控制
4. 轮机数字控制和联网控制
5. 轮机自动化故障诊断与排除
三、教学方法
本课程采用讲解、演示和实验等多种教学方法,结合实际案例和场景,让学生更好地
掌握课程内容。
四、具体教学计划
第一周
1. 轮机自动化控制系统
2. 数字信号与模拟信号
3. 传感器和执行器的使用
第二周
1. 控制系统的反馈原理
2. 电机控制的基本原理
3. 马达控制的基本原理
第三周
1. 轮机电子技术
2. 功率半导体器件
3. 电子电路的基本原理
第四周
1. 主机、辅机和配套设备的自动化控制
2. 针对不同设备的控制方式和方法
3. 实例分析与操作演示
第五周
1. 轮机数字控制和联网控制
2. 工业总线的应用
3. 控制器和PLC编程
第六周
1. 轮机自动化故障诊断与排除
2. 故障分析和处理的基本原则
3. 实验室操作演示
五、教学建议
1. 学生在课前需要自学相关基础知识,认真阅读教材并做好笔记;
2. 以案例分析方式,让学生更好地理解课程内容;
3. 结合近年来的轮机自动化技术发展趋势,更新教材内容和教学方法;
4. 注意引导学生掌握自主学习和实践的能力,鼓励学生参与实验室实践和实际案例的分析与处理。
《轮机自动化》课程教学大纲

《船舶动力装置专业课程设计》课程教学大纲一、课程基本信息1、课程代码:NA4132、课程名称(中/英文):船舶轮机专业课程设计/Curriculum Design of Marine Power Plants3、学时/学分 34学时/2学分4、先修课程:机械与工程热物理等专业基础课、船舶主机、船舶辅机,船舶动力装置5、面向对象:轮机工程6、开课院(系)、教研室:船舶海洋与建筑工程学院船舶与海洋工程系7、推荐教学参考书:二、课程性质和任务本课程是船舶与海洋工程专业轮机工程方向本科生的必修课程。
通过本课程的学习和实际的课程设计,期望学生能进一步全面地了解船舶动力装置总体设计思想和技术发展;掌握推进轴系规范设计方法和校中设计、计算方法;主机、传动设备的选型方法;动力装置最优设计方法和计算机辅助设计方法等。
三、教学内容和基本要求《船舶轮机专业课程设计》教学内容分为二大部分,其中第一部分为课堂教学内容,第二部分为课程设计内容。
第一部分课堂教学内容第一章绪论1. 1 船舶动力装置设计的任务、内容和要求1. 2 船舶动力装置设计方法和基本步骤1. 3 船舶动力装置的计算机辅助设计1. 4 船舶动力装置最优设计技术的发展要求:了解并熟悉船舶动力装置设计的任务、内容和要求、设计方法和基本步骤、计算机辅助设计和最优设计技术的发展第二章主推进装置型式及主机选型2.1 概述2.2 主推进装置型式的确定2.3 主机选型论证分析2.4 主机选型的计算机辅助设计要求:基本掌握主推进装置型式的确定基本方法、主机选型论证分析内容及过程以及主机选型的计算机辅助设计方法。
第三章推进轴系设计和传动设备选型3.1 船舶推进轴系设计内容、任务和要求3.2 轴系布置及校中设计3.3 轴系部件设计3.4 传动设备的选型设计3.5 推进轴系的计算机辅助设计要求:掌握轴系布置及校中设计、轴系部件设计、传动设备的选型设计和推进轴系的计算机辅助设计方法。
《轮机自动化原理》课程设计指导书
轮机自动化原理课程设计指导书作者:吴金波华中科技大学船舶与海洋工程学院二○一四年六月制目录目录 (1)1 设计目的 (2)2 设计要求 (3)2.1 仿真分析类 (3)2.1.1 设计工作量 (3)2.1.2 进度安排 (3)2.2 工程设计类 (4)2.2.1 设计工作量 (4)2.2.2 进度安排 (4)2.3 数据采集与处理类 (4)2.3.1 设计工作量 (4)2.3.2 进度安排 (5)3 设计内容及步骤 (6)3.1 基于PLC的主机转速控制试验台设计 (6)3.1.1 设计要求 (6)3.1.2 设计步骤 (6)3.2 IG-500A管道传感器的数据采集及其数据融合 (7)3.2.1 设计要求 (7)3.2.2 设计步骤 (7)3.3 基于改变容积的高精度压力控制系统的设计 (8)3.3.1 设计要求 (8)3.3.2 设计步骤 (8)3.4 基于改变容积的高精度压力控制系统的建模与分析 (9)3.4.1 设计要求 (9)3.4.2 设计步骤 (9)3.5 基于AR模型的舰船运动姿态在线预报算法设计 (9)3.5.1 设计要求 (9)3.5.2 设计步骤 (10)3.6 气囊隔振装置姿态控制仿真研究 (10)3.6.1 设计要求 (10)3.6.2 设计步骤 (11)3.7 面向滑道式小艇收放的自动脱、挂钩装置设计 (12)3.7.1 设计要求 (12)3.7.2 设计步骤 (12)3.8 微小型水下机械手设计 (13)3.8.1 设计要求 (13)3.8.2 设计步骤 (13)4 设计成绩考核 (14)5 几点说明 (15)1 设计目的轮机自动化课程设计是在学生学完专业课程以后进行的一项重要教学环节。
它要求学生初步学会综合运用过去所学的课程知识,作一次基本的技术训练,为搞好毕业设计和今后的工作准备条件、打好基础。
其设计目的如下:1、理想目标:掌握先进过程监测与控制技术,理解控制系统、分析控制策略、甚至设计新型的控制算法和控制系统;2、通过舰船自动化装备和水下作业工具的设计和分析,学习并掌握如何建立对象系统的数学模型,以用于过程参数检测、控制系统的分析、参数整定和控制系统设计;3、了解整个控制系统的设计过程,掌握设计方法,能熟练地运用所学的基本理论知识,正确地解决舰船或水下作业工具某一自动化装置的设计问题。
《轮机自动化》课程教学大纲

2
监视与报警
系统和主机 遥控系统实 2
验
面授 面授 面授
习题 习题
完成要求 书面作业 完成要求
书面作业
习题
完成要求 书面作业
面授
习题
完成要求 书面作业
面授 实验
习题
完成要求 书面作业
完成实验 完成要求 实验报告
实验
完成实验 完成要求 实验报告
考核方式 (Grading)
教材或参考资料 (Textbooks & Other
《轮机自动化》课程教学大纲
课程基本信息(Course Information)
课程代码 (Course Code)
学时
学分
(Credit Hours)
48
(Credits)
3
课程名称
轮机自动化
(Course Name)
Marine Automation
课程性质 (Course Type)
授课对象 (Audience)
Materials)
其它 (More)
备注 (Notes)
考试 80 % + 平时 20 % 视上课和实验及作业情况给分
教材: 1.轮机自动化,万曼影,上海交通大学出版社,2007 年 8 月 参考资料:1.船舶动力装置自动化,赵国光,上海交通大学出版社
2.轮机自动化,郑凤阁,大连海事大学出版社
邓真全
课程网址
无
(Course Webpage)
课程简介(Description)
《轮机自动化》是船舶与海洋工程专业轮机工程方向本科生的必修课 程。轮机自动化是船舶自动化的核心,它是一门综合学科,着重于实 际系统的应用。它是电工与电子学、自动控制理论、仪器与仪表、微 机控制等学科的知识在船舶动力装置自动化中的应用,是培养具备机 电一体化复合人材的必备环节。其主要内容包括轮机自动化的基础知 识,船用自动化仪表,船舶柴油机及辅助设备参数自动控制系统,机 舱监视与报警系统,船舶主机遥控系统等。为使学生加深对理论学习 的理解,本课程还配置了三个实验:PID 调节器参数整定,CAN 总线监 视与报警系统,气动遥控系统。学习本课程后,学生可掌握船舶动力 装置自动化系统的组成和工作原理,为以后从事船舶动力装置及自动 化的设计打下基础。
《轮机自动化》课程教学大纲
《轮机自动化》课程教学大纲一、本课程的性质与任务轮机自动化属于轮机管理专业的专业课性质。
其目的是讲解轮机自动化所涉及的基本控制理论和船舶机舱典型自动控制系统的组成、结构、工作原理、管理要点和故障分析方法,为学生能够适应现代船舶机舱的管理奠定基础。
二、课程简介“轮机自动化”课程讲授轮机自动化所涉及的基本控制理论和船舶机舱典型自动控制系统的组成、结构、工作原理、管理要点和故障分析方法。
课程内容包含14个部分,即反馈控制系统的基本概念、调节器基本作用规律、传感器和变送器、执行机构、船舶冷却水温度自动控制系统、燃油粘度自动控制系统、分油机自动控制系统、船用燃油辅锅炉的自动控制系统、阀门遥控及液舱遥测系统、主机遥控系统基础知识、船舶柴油主机气动操纵系统、AUTOCHIEF-Ⅳ主机遥控系统、监视与报警系统概述和DATACHIEF-C20监视与报警系统。
三、课程知识体系架构及教学要求(一) 理论授课1.反馈控制系统的基本概念1.1反馈控制系统的组成概念:●反馈控制系统、反馈、控制对象、测量单元、调节单元、执行机构、环节、扰动、闭环系统◎输入、输出、设定值、测量值、偏差、被控量、控制量、基本扰动、外部扰动○前向通道、反馈通道、开环控制、复合控制、前馈知识点及应用:●(1)反馈控制系统的基本组成环节●(2)反馈控制系统的传递方框图●(3)反馈控制系统的工作过程●(4)反馈控制系统的分类○(5)自动控制系统的其他形式案例:○柴油主机缸套冷却水温度控制系统1.2反馈控制系统的动态过程概念:●稳态(平衡态)、动态(过渡)过程、阶跃输入、衰减率、超调量、静态偏差、过渡过程时间◎速度输入、脉冲输入、发散振荡、等幅振荡、衰减振荡、非周期过程、最大动态偏差○正弦输入、振荡次数、上升时间、峰值时间知识点及应用:●(1)控制系统动态过程的概念●(2)控制系统的典型输入信号●(3)评定控制系统动态过程品质的指标案例:●(1)定值控制系统的动态过程●(2)随动控制系统的动态过程2.调节器基本作用规律2.1双位作用规律概念:●双位控制、双位作用规律、压力开关、上限值、下限值、幅差知识点及应用:●(1)双位控制的概念●(2)双位控制的特点●(3)双位控制中被控量上、下限的调整案例:●(1)浮子式辅锅炉水位双位调节器●(2)YT-1226型压力调节器2.2比例作用规律概念:●比例作用、比例系数、比例带◎正作用式调节器、反作用式调节器○量程系数知识点及应用:●(1)比例作用的概念及其表达式●(2)比例作用的控制过程●(3)比例作用的特点●(4)比例带的概念及其大小对比例作用强度的影响●(5)比例作用的开环阶跃响应特性案例:●(1)浮子式水位比例控制系统◎(2)气动比例调节器2.3比例积分作用规律概念:●积分作用、比例积分作用、积分时间知识点及应用:●(1)积分作用的概念及其表达式●(2)比例积分作用的的概念及其表达式●(3)积分作用的特点●(4)积分时间的概念及其物理意义●(5)比例带的概念及其大小对比例作用强度的影响●(6)比例积分作用的开环阶跃响应特性案例:◎气动比例积分调节器2.4微分作用规律概念:●理想的微分作用、实际的微分作用、微分时间知识点及应用:●(1)微分作用的概念及其表达式●(2)比例微分作用的概念及其表达式●(3)微分时间的概念及其大小对微分作用强弱的影响●(4)微分作用的特点●(5)实际微分作用的开环阶跃响应特性案例:◎气动比例微分调节器2.5比例积分微分作用规律概念:●比例积分微分作用知识点及应用:●(1)比例积分微分作用的概念及其表达式●(2)比例积分微分作用的开环阶跃响应特性●(3)比例积分微分作用的气动实现方法◎(4)比例积分微分作用的集成电路实现方法○(5)比例积分微分作用的数字实现方法案例:●(1)QTM-23J气动PID调节器◎(2)NAKAKITA气动PID调节器◎(3)由运算放大器组成的PID调节器○(4)增量式数字PID控制算法流程3.传感器和变送器3.1船舶机舱常用传感器概念:●温度传感器、压力传感器、液位传感器、流量传感器、转速传感器、转矩传感器知识点及应用:●(1)各种传感器的测量原理◎(2)信号变换原理案例:◎(1)热电阻、热电偶温度传感器及其转换电路◎(2)滑动电阻式、金属应变片式、电磁感应式压力传感器◎(3)变浮力式、吹气式液位传感器◎(4)容积式、电磁式、差压式流量传感器◎(5)测速发电机式、磁脉冲式转速传感器◎(6)相位差式转矩传感器3.2变送器概念:●变送器、零点、量程、迁移知识点及应用:●(1)变送器的构成原理●(2)变送器零点和量程的概念●(3)变送器的标准输出信号●(4)气动差压变送器的工作原理及其调整方法◎(5)电动差压变送器的工作原理及其调整方法●(6)变送器的应用方法案例:◎(1)气动差压变送器◎(2)电动差压变送器◎(3)变送器测量锅炉水位的实例4执行机构概念:●气开式调节阀、气关式调节阀、阀门定位器、位置反馈知识点及应用:●(1)气动调节阀的类型●(2)气动阀门定位器的工作原理●(3)电动执行机构的组成原理●(4)电/气动执行机构的组合方式案例:◎带阀门定位器的气动薄膜调节阀5船舶冷却水温度自动控制系统概念:●开式冷却、闭式冷却、高温淡水、低温淡水、缸套水知识点及应用:●(1)主机缸套水的冷却方法●(2)主机缸套冷却水温度控制系统的组成●(3)控制系统工作原理及操作方法案例:◎ENGARD型中央冷却水温度自动控制系统6燃油黏度自动控制系统概念:●燃油粘度、燃油粘度控制、燃油温度控制、燃油切换知识点及应用:●(1)燃油粘度控制方法●(2)燃油粘度测量原理●(3)燃油粘度控制系统的组成及其工作原理案例:◎NAKAKITA型燃油粘度控制系统7分油机自动控制系统概念:●操作水、排渣、排水、分油机时序控制、报警知识点及应用:●(1)分油机自动控制系统的组成●(2)控制系统的时序控制过程●(3)控制系统的操作和管理案例:◎ALFA-LAVAL EPC-40分油机自动控制系统8船舶燃油辅锅炉自动控制系统概念:●预扫风、点火、燃烧时序、时序控制器、火焰检测器、风压保护、熄火保护、水位控制、燃烧控制知识点及应用:●(1)辅锅炉的水位双位控制●(2)辅锅炉的蒸汽压力自动控制●(3)辅锅炉的燃烧时序控制过程◎(4)采用PLC的辅锅炉燃烧时序控制案例:◎采用PLC的辅锅炉燃烧时序控制实例9阀门遥控及液舱遥测系统概念:●阀门遥控、液位遥测知识点及应用:●(1)阀门遥控系统的功能、组成及原理●(2)液位遥测系统的功能、组成及原理案例:无10主机遥控系统基础知识概念:●自动遥控、手动遥控、起动、换向、能耗制动、强制制动、重复起动、重起动、慢转起动、加速速率限制、程序负荷、转速限制、临界转速回避、负荷限制、应急操纵、越控知识点及应用:●(1)主机遥控系统的组成●(2)主机遥控系统的主要功能●(3)主机遥控系统的分类●(4)车钟系统●(5)起动逻辑回路●(6)换向逻辑回路●(7)制动逻辑回路●(8)转速与负荷控制●(9)主机遥控系统的信号转换和执行机构案例:◎(1)车钟系统实例◎(2)起动、换向逻辑回路实例◎(3)电/气转换器实例◎(4)电/液伺服器实例◎(5)电动执行机构实例11船舶柴油主机气动操纵系统概念:●气动操纵系统、两位三通阀、主起动阀、起动控制阀、气缸起动阀、空气分配器、操作部位切换、遥控、机旁操作、起动油量、可变喷油定时知识点及应用:●(1)气动操纵系统的气源及其分布●(2)机旁/遥控切换●(3)集控/驾控切换●(4)机旁操作时的停车、换向和起动过程●(5)集控操作时的停车、换向和起动过程●(6)驾控操作时的停车、换向和起动过程●(7)VIT动作原理案例:◎MAN-B&W-S-MC/MCE型主机气动操纵系统12 AUTOCHIEF-Ⅳ主机遥控系统概念:●驾驶台控制单元、集控室控制单元、车钟记录装置、安全保护单元(SSU8810)、数字调速单元(DGU8800e)知识点及应用:●(1)AC-4主机遥控系统的组成●(2)驾驶台控制面板及其功能●(3)集控室控制面板及其功能●(4)AC-4主机遥控系统的主要控制功能●(5)AC-4主机遥控系统在不同车令下的工作过程●(6)AC-4主机遥控系统的参数显示与设置●(7)AC-4主机遥控系统的装置功能试验案例:◎AC-4主机遥控系统的结构组成及其主要操作方法13 机舱监视与报警系统概述概念:●监视与报警、延伸报警、延时报警、报警闭锁、连续监视、扫描监视知识点及应用:●(1)监测参数的类型●(2)监视与报警系统的监测方式●(3)监视与报警系统的组成与功能案例:无14 DATACHIEF-C20监视与报警系统概念:●网络、分布式处理单元(DPU)、远程操作站(ROS)、值班呼叫系统(WCS)、网关知识点及应用:●(1)DC C20监控系统的结构组成●(2)分布式处理单元(DPU)●(3)远程操作站(ROS)及系统功能案例:◎DATACHIEF-C20监视与报警系统(二) 实验授课1.反馈控制系统实验实验内容:单容水柜水位控制系统演示与实操实验要求:(1)结合水位控制系统实验装置了解反馈控制系统的结构组成,熟悉实验装置的管路和信息流程,对反馈控制系统的基本组成环节进行对号入座;(2)将控制对象(单容水柜)、将调节器、测量单元和执行机构连成闭环系统,并投入运行,观察实际水位的变化情况,理解调节过程;(3)通过电脑屏幕观察反馈控制系统的动态过程。
轮机自动化教学设计

轮机自动化教学设计简介随着航海技术的不断发展和更新,船舶轮机系统的自动化程度也在不断提高。
为了适应这种发展趋势,我设计了一套关于轮机自动化的教学方案,旨在让学生更有效地学习相关知识,提高自身的实际应用能力。
教学内容本教学设计主要包括以下方面:•轮机自动化知识介绍•轮机自动化系统设计与安装•轮机自动化系统维修与故障排除教学目标通过学习本教学内容,学生将能够:•掌握轮机自动化的相关知识•能够自主设计与安装轮机自动化系统•能够有效地维修与排除轮机自动化系统故障教学方法为了达到上述教学目标,我将采用以下教学方法:1. 理论授课首先,我将通过理论知识的讲解,让学生了解轮机自动化的基本原理与概念。
并通过示意图、模拟器等形式,帮助学生更好地理解相关知识。
2. 实践授课其次,我将针对轮机自动化系统的设计、安装、维修与故障排除分别进行相关实践授课。
通过真实的案例演示,让学生能够更好地掌握相关技能,并提高实际操作能力。
3. 案例分析在教学过程中,我还将引入一些典型案例,对学生进行深入解析,让学生能够更加深刻地理解案例中所涉及的轮机自动化系统设计、安装、维修和故障排除的问题。
4. 课堂交流最后,我还将鼓励和引导学生之间的交流与讨论,让学生能够更好地理解彼此的观点和思路,并进行互相学习和帮助。
课程评估为了确保本教学方案的有效性,我将采用以下方式进行课程评估:1. 课后作业每节课后,我将布置相关作业,以检测学生对所学知识的掌握情况,同时也希望学生能够通过作业更好地加深和巩固所学知识。
2. 实践操作在课程最后,我将安排一系列轮机自动化系统的实际操作,以检测学生对所学知识的综合应用能力和实践操作能力。
3. 期末考试最后,在整个学期结束后,我将通过期末考试来检验学生对整个教学内容的掌握情况,以此来进行成绩评估。
总结通过本教学设计,我相信能够让学生更有效地学习轮机自动化相关知识,提高相关实际应用能力。
希望能为轮机自动化教学提供参考和借鉴,也希望能够吸引更多专业人才加入到船舶技术领域中来。
《轮机自动化》课程标准

《轮机自动化》课程标准课程代码:课程类型:理实一体化课程性质:必修课适用专业:轮机工程技术专业总学时:90一、课程性质与作用《轮机自动化》是海洋船舶轮机工程技术〈轮机管理〉专业核心课程,是海船船员三管轮适任考试课程之一,是从事船舶控制设备运行、维护、安装、调试,航运部门机务管理必备的课程。
二、课程目标按照STCW公约(2010修正案)、中华人民共和国海船船员适任考试和发证规则、中华人民共和国《轮机自动化》课程考试大纲所规定的船舶轮机员(三管轮)适任标准与岗位能力标准,确定本课程的知识目标、能力目标以及素质目标。
(一)知识目标・能表述自动控制系统的基本组成和动态过程形式;・能表述调节规律的类型、作用和特点;・能表述常用传感器、变送器、调节器、执行机构的作用、基本原理和特点;・能表述典型的机舱自动控制系统的作用、组成和工作原理;・能表述主机遥控系统的类型、组成和主要功能;・能表述机舱监视与报警系统的类型和主要功能;・能表述火灾自动报警系统的类型、主要功能和特点。
(二)能力目标・具备变送器、调节器、执行机构等自动化仪表的使用操作与调整的能力;・具备冷却水温度、燃油供油单元、燃油净油单元、燃油辅锅炉、自清滤器、阀门遥控及液舱遥测等自动控制系统的操作与管理能力;・具备主机遥控系统的操作与管理能力;・具备机舱监视与报警系统的操作与管理能力;(三)素质目标・具备良好的职业道德、工作责任心和吃苦耐劳的品质。
具备服从意识与团队协作精神,具有良好的语言表达能力尤其是英语表达能力和涉外事务的处理能力。
・具有良好的行为习惯和人际关系,尊重他人、服从集体。
具有敏捷的情景意识与正确判断能力。
严格遵守劳动合同及涉外纪律,具有良好的通信与沟通能力。
三、课程设计理念与思路课程设置依据:依据STCwlo公约、国家海事局高级船员最新考纲和现代船舶轮机管理的工作需求设置“轮机自动化”课程;同时考虑到“以职业素质为基础,以适岗能力为本位”的教育教学指导思想和航海高职高专学生的认知规律,以满足远洋船舶轮机人才需求、船舶轮机岗位群能力的需求和对于高级船员的适任要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
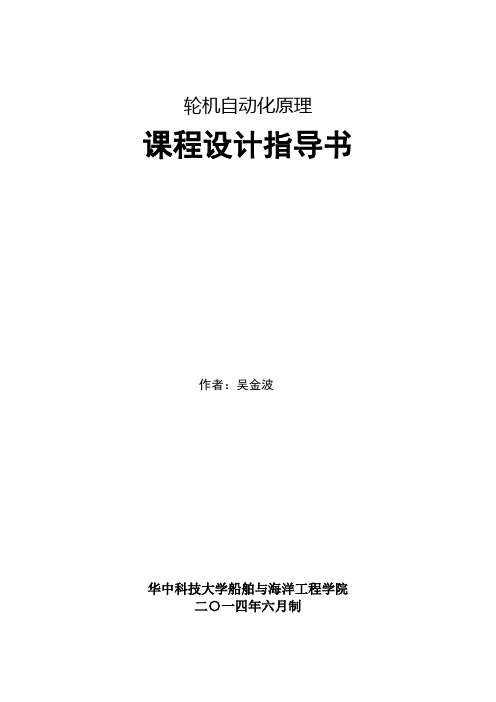
六.三通电磁阀和三通活塞阀
如图7-1-5所示:
图7-1-5 三通电磁阀和三通活塞阀结构示意图 1-手轮 限位螺钉 控制活塞 活塞杆 上阀座 手轮;2-限位螺钉 控制活塞;4-活塞杆 上阀座; 手轮 限位螺钉;控制活塞 活塞杆;5-上阀座 6-控制阀 下阀座 弹簧 限位关杆 控制阀;7-下阀座 弹簧;9-限位关杆 控制阀 下阀座;8-弹簧
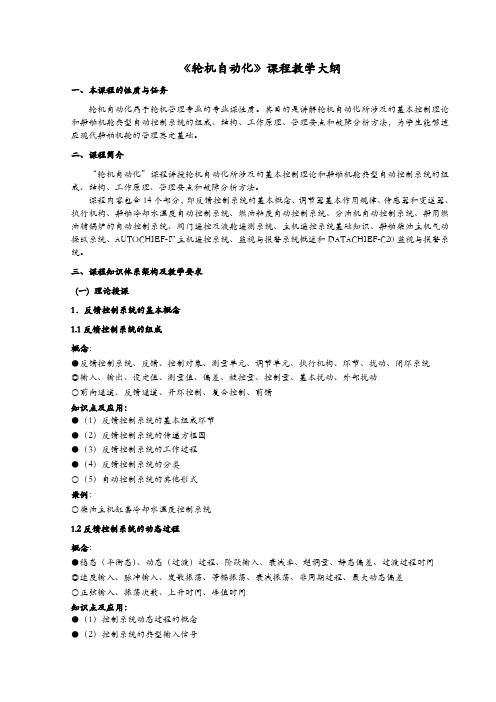
图7-1-2 测黏计结构元理图 1-齿轮泵 毛细管 连接管 齿轮泵;2毛细管 齿轮泵 毛细管;3连接管
三.调节器
如图3-5-3所示:
气动PID调节器结构原理图 图3-5-3 NAKAKITA气动 气动 调节器结构原理图
四.温度程序控制器
如图7-1-3所示:
图7-1-3 温度程序设定装置工作原理图
A.用于显示控制过程的温度,报警种类和参数设定代码; B.用于显示过程粘度值,触发报警的现行参数值或参数设定值; C.显示控制方式(粘度控制还是温度控制); D.显示是电加热还是蒸汽加热; E.显示现行是D0控制还是HF0控制。
⑸报警电路 如图7-2-6所示: PB0、PC3、触发电LS122、继电器x。
七.控制电路工作过程
如图7-1-6所示:
1.控制功能
起动→温度程序控制(马达转速)→D/F转换→转换成功否→继续温度程序 控 制→温度定值控制→粘度定值控制; 停止→温度定值控制→继续温度程序控制→用轻油工作。
2.控制电路的工作过程
籍图7-1-6叙及。
3.管理要点及对常见故障分析与排除
本系统的粘度和温度调节器都是气动仪表。 ①系统在运行过程中,每隔一段时间要按一下装要横节流孔上的通针,对横节流 , , 孔进行一次冲洗,以免被污物堵塞。如果横节流孔旁没有装通针,应把它拆下来 用溶剂进行清洗。在装配前,要用压缩空气吹干; ②测粘计马达滚珠轴承每年清洁一次,并重新灌注润滑脂。齿轮箱每年要检查 和清洗一次,清洗后用压缩空气吹干,添加新齿轮油至正常油位; ③最常见的故障是,当系统停用一段时间再启用时,执行机构的调节阀刚开始不 动作,势必导致被控参数暂时失控。在这种情况下,最简单的方法是通过大幅度 的改变给定值,使调节器的输出增大,一旦调节阀动作后,立即将给定值调回到正 常值即可。
图7-2-7
LM339四电压比较器逻辑图 LM339四电压比较器逻辑图 339
b、调节阀限位选择开关如图7-2-6所示: c、操作键盘PB1、PB2、PB3如图7-2-6所示:
⑶输出控制电路 输出接口8255PA、PB、BC。 ⑷显示电路 如图7-2-8所示:
图7-2-8显示面板布置图 显示面板布置图
三.VCU-100O粘度控制器
1控制方式和过程 如图7-2-5所示:
图7-2-5粘度控制过程曲线 粘度控制过程曲线
2.控制电路板 如图7-2-6所示:
8031单片机,可编程并行接口电路8255,模拟量输入电路DG508,开关输入电 路LM339、SFH618和操作键盘,输出电路ULN2803及LS122等。 ⑴模拟量输入电路 数据放大器A1,A2,8位多路转换器DG508、A0、A1、A2。 ⑵开关量输入电路 a、工作方式选择开关如图7-2-7所示:
§7-2VISCHIEF燃油粘度控制系统
一.控制系统的组成、功能及特点
如图7-2-1所示:
图7-2-1 VISCHIEF黏度自动控制系统组成图 黏度自动控制系统组成图 1-EVT-10C黏度传感器 黏度传感器;2-Pt100温度传感器 温度传感器; 黏度传感器 温度传感器 3-VCU-160控制器 蒸汽调节阀 蒸汽燃油加热 控制器;4-蒸汽调节阀 控制器 蒸汽调节阀;5-蒸汽燃油加热 电动燃油加热器;7-电源控制箱 器;6-电动燃油加热器 电源控制箱 电动燃油加热器
1.温度给定值设定; 4.轻、重油转换的中间温度; 5.温度给定值的上升速度表 如图7-1-1所示:
图7-1-1 NAKAKITA燃油黏度控制系统组成原理图 燃油黏度控制系统组成原理图
五.温度-黏度控制的选择开关
如图7-1-4所示:
温度-黏度控制选择开关 图7-1-4 温度 黏度控制选择开关
四.控制系统的管理要点
1.系统工作之前的准备工作; 2.EVT-10C的工况检看; 3根据说明书。
图7-2-3单片机变送器电路原理图 单片机变送器电路原理图 3.Pt100温度传感器 温度传感器 如图7-2-4所示: 所示: 如图 所示
图7-2-4 Pt100温度传感器结构原理图 温度传感器结构原理图 1-检测元件;2-止回帽;3-弹簧; 检测元件; 止回帽 止回帽; 弹簧 弹簧; 检测元件 4-导向管 锁紧螺帽;6-管路;7-传感器 导向管5-锁紧螺帽 管路; 传感器 导向管 锁紧螺帽; 管路
第七章.燃油粘度自控系统
§7-1NAKAKITA燃油粘度控制系统
一.控制系统的组成
如图所示7-1-1所示:
1.温度程序自动控制; 2.温度定值控制; 3.粘度定值控制; 4.D/F自控转换。 图7-1-1 NAKATA燃油黏度控制系统组成原理图 燃油黏度控制系统组成原理图
二.测粘计
如图7-1-2所示:
二.测量单元
1.测粘计 如图7-2-2所示:
图7-2-2 EVT-10C粘度传感器结构原理图 粘度传感器结构原理图 1-振动杆;2-动力线圈;35-永久磁铁; 振动杆; 动力线圈 动力线圈; 永久磁铁 永久磁铁; 振动杆 4-检测线圈;6-单片机系统 检测线圈; 单片机系统 检测线圈
2.单片机变送器 如图7-2-3所示: