第三章6节提升设备的运动学和动力学zs
机械动力学课程教学大纲

机械动力学课程教学大纲一、课程简介机械动力学是机械工程中的重要基础课程之一,主要研究物体的运动规律和动力学原理。
本课程旨在培养学生对物体运动的分析和动力学理论的理解能力,为学生提供运动学和动力学的基础知识,为他们今后的学习和研究奠定牢固基础。
二、教学目标1. 培养学生对物体运动的观察和分析能力;2. 熟悉运动学和动力学的基本概念和原理;3. 掌握常见的力学定律和公式;4. 培养学生的问题解决能力和实践能力;5. 培养学生的团队合作能力和沟通能力。
三、教学内容1. 运动学基础1.1 位置、位移和速度1.2 加速度和曲线运动 1.3 圆周运动和角速度1.4 相对运动2. 动力学基础2.1 牛顿运动定律2.2 动量和动量守恒2.3 力和加速度2.4 动能和功2.5 能量守恒和机械能3. 静力学3.1 弹簧力和弹性势能 3.2 引力和万有引力定律3.3 惯性力和离心力4. 动力学4.1 圆周运动的力学分析4.2 非惯性系和转动惯量4.3 力矩和角动量4.4 角动量守恒和刚体转动4.5 飞行器的运动学和动力学四、教学方法1. 讲授理论知识:通过课堂讲解、示范等方式,向学生介绍理论知识和基本概念。
2. 实验教学:设计相关实验,让学生进行实验操作和数据分析,提高他们的实践能力。
3. 小组讨论:设置小组活动,让学生在团队中合作解决问题,培养团队合作和沟通能力。
4. 课堂练习:布置课后作业和练习题,加强对知识的巩固和运用能力。
五、考核方式1. 平时表现(20%):包括课堂参与、作业完成情况等。
2. 实验报告(30%):根据实验要求撰写实验报告并提交。
3. 期中考试(20%):考察对课程内容的理解和掌握程度。
4. 期末考试(30%):综合考察整个课程的学习成果。
六、参考教材1. 赵凤岐,机械动力学,高等教育出版社,2015年。
2. 谢振波,机械力学基础,清华大学出版社,2013年。
七、参考网址无。
八、备注本课程的教学大纲可根据实际教学需求进行调整和补充,以确保教学内容的连贯性和可操作性。
第八章__提升系统动力学与运动学

第一节矿井提升运动学一、提升速度图竖井提升速度图因提升容器的不同一般可分为箕斗提升速度图(六阶段速度图)和罐笼提升速度图(五阶段速度图)。
图5一l所示为常采用的交流拖动双箕斗提升系统六阶段速度图,因它具有六个阶段而得名。
速度图表达了提升容器在一个提升循环内的运动规律,现简述如下:图5-1 箕斗提升六阶段速度图(1)初加速度阶段t0 提升循环开始,处于井底装载处的箕斗被提起,而处于井口卸载位置的箕斗则沿卸载曲轨下行。
为了减少容器通过卸载曲轨时对井架的冲击,对初加速度a0及容器在卸载曲轨内的运行速度v0 。
要加以限制,一般取Vo≤1.5 m/s 。
(2)主加速阶段t1 当箕斗离开曲轨时,则应以较大的加速度a1运行,直至达到最大提升速度vm ,以减少加速阶段的运行时间,提高提升效率。
(3)等速阶段t2箕斗在此阶段以最大提升速度v m运行,直至重箕斗将接近井口开始减速时为止。
(4)减速阶段t3重箕斗将要接近井口时,开始以减速度a3运行,实现减速。
(5)爬行阶段t4重箕斗将要进入卸载曲轨时,为了减轻重箕斗对井架的冲击以及有利于准确停车,重箕斗应以低速v4爬行。
一般v4=0.4~0.5m/s,爬行距离v4 =2.5~5m。
(6)停车休止阶段t5当重箕斗运行至终点时,提升机施闸停车。
处于井底的箕斗进行装载,处于井口的箕斗卸载。
箕斗休止时间可参考表5—1。
图5—2所示为双罐笼提升系统五阶段速度图。
因为罐笼提升无卸载曲轨,故其速度图中无t0阶段。
为了准确停车,罐笼提升仍需有爬行阶段,故罐笼提升的速度图为五阶段速度图。
罐笼进出车休止时间参考相应手册。
二、最大提升速度由式(1-1)计算的经济速度v j ,并不是提升机的最大提升速度v m ,但值尽可能是接近值。
而最大提升速度值应如何确定呢?提升机的卷筒是由电动机经减速器拖动的。
提升机卷筒圆周的最大速度与电动机额定转数n e 及减速器传动比i 有关,其关系如下式所示:)/(60s m i Dn v em π= 5-1)式中:D 为提升机卷筒直径,m ;i 为减速器传动比, n e 为电动机额定转数,r /min 由式(5—1)计算的最大提升速度v m ,因每台提升机所选配的电动机转数的不同和减速器速比的不同而具有有限的几个数值,这有限的几个数值均称为提升机的标准速度—最大提升速度。
第三章 起升系统工作原理

石油钻采机械主讲:马卫国第三章钻机起升系统工作原理第一节起下钻操作与游动系统工作原理第二节起升运动学动力学问题第三节起升曲线与起升功率利用率第四节下钻运动学和动力学学习目的:掌握钻机起升系统的工作特性石油钻采机械主讲:马卫国第二章钻机起升系统工作原理第一节起下钻操作和游动系统工作原理石油钻采机械主讲:马卫国第三章:钻机起升系统工作原理——起下钻操作和游动系统工作原理一、起下钻操作1、起钻操作更换钻头时,或钻遇目的层时,需要将井中的全部钻柱取出,这个操作过程,称起钻作业。
2、下钻操作将钻头、钻铤、钻杆、方钻杆组成的钻杆柱下入井中,称下钻作业。
下钻:下立根和下单根。
石油钻采机械主讲:马卫国第二章:钻机起升系统工作原理——起下钻操作和游动系统工作原理二、游动系统中钢丝绳与滑轮的运动分析V —大钩速度;V′—钢丝绳速度;V″—天车滑轮切向速度;Z —游动系统有效绳数(除快绳、死绳之外);D c——滑轮直径石油钻采机械主讲:马卫国钢丝绳速度由快绳侧至死绳侧依次为:0''2''4''6''54321==========d z n v v v vv v vv v zvv v v 第三章:钻机起升系统工作原理——起下钻操作和游动系统工作原理石油钻采机械主讲:马卫国天车滑轮的切向速度V″和转速n 依次为:,0"260,2"460,4"60,"44332211==×==×====n v D v n v v D v n v v D zv n zv v cc c πππ第三章:钻机起升系统工作原理——起下钻操作和游动系统工作原理石油钻采机械主讲:马卫国第三章:钻机起升系统工作原理——起下钻操作和游动系统工作原理讨论:1、起钻时,快绳侧的滑轮转速要比死绳侧的高数倍;检修、倒换——寿命均衡设计依据——快绳工况2、快绳侧的钢丝绳的弯曲次数要比死绳侧钢丝绳多出数倍;快绳侧钢丝绳提前疲劳——检查、补充新绳。
矿井运输提升之矿井提升运动学及动力学

矿井提升运动学及动力学提升速度图•提升设备在一个提升循环内其提升速度随时间变化的关系图形,叫做提升速度图。
•对于底卸式箕斗,为保证箕斗离开卸载曲轨时速度不能过高,需要有初加速阶段;为使重箕斗上升到井口而进入卸载曲轨内运行时,减少对井架、曲轨的冲击,提高停车的准确性,应有一个低速爬行阶段,故箕斗提升采用六阶段速度图。
•t0--初加速阶段运行时间,由于这时井上空箕斗在卸载曲轨内运行,故加速度不可过高,以免对设备产生过大冲击,箕斗滑轮离开曲轨时的速度vo≤1.5m/s;•t1--主加速阶段运行时间•t2--等速阶段运行时间•t3--主减速阶段运行时间•t4——爬行阶段运行时间,此时重箕斗上升到井口以上进入卸载曲轨运行,为减少对井架及曲轨的冲击,爬行≤0.5m/s;速度一般控制在v4•t5--抱闸停车阶段时间,•θ——休止时间,即装卸载时间。
•对于罐笼提升,因无卸载曲轨的限制,故无需初加速阶段,开始就以较大的主加速度加速,但是为了准确停车(使罐笼内的轨道与车场轨道对齐),也需要有一爬行阶段,因此,普通罐笼提升采用五阶段速度图。
提升加速度的确定1、箕斗提升初加速度a为了保证提升开始时,空箕斗对卸载曲轨及井架的冲击不致过大,箕斗离开卸载曲轨时的速度被限制在Vo≤1.5m/s,根据目前大量通用的箕斗卸载曲轨行程为2.13m,(新标准系列箕斗的卸载曲轨=0.5m/s2。
行程为2.35m),所以一般初加速度ao2、主加速度a1的确定主加速度a1 是按安全经济的原则来确定的,主加速度的大小受《煤矿安全规程》、减速器强度、电动机过负荷能力三个方面的限制。
综合考虑上述三个条件,按其中最小者确定主的大小。
加速度a1•《煤矿安全规程》对提升加、减速度的限制:“立井中用罐笼升降人员时加速度和减速度,都不得超过0.75 m/s2;斜井中升降人员的加速度和减速度,不得超过0.5 m/s2。
”•对升降物料的加、减速度规程没有规定,一般在竖井,加、减速度最大不超过1.2m /s2,斜井不超过0.7 m/s2。
机械动力学教学大纲 - 机电工程学院

机械动力学教学大纲课程编号:S292006课程名称:机械动力学开课院系:机电工程学院任课教师:李顺才先修课程:理论力学、材料力学、机械原理适用学科范围:机械工程学时: 36 学分: 2开课学期:第2 学期开课形式:讲授课程目的和基本要求:本课程是机械工程类专业研究生的一门学位专业课。
其主要任务是使学生了解机械动力学的基本原理和方法,初步掌握转子动力学、机构平衡、凸轮动力学、机械系统动力学、机械振动的基本理论、建模方法与分析计算等方面的具体分析方法,实现一般机械系统的动态分析与设计,并对该学科的发展前沿和研究动向有所了解。
本课程着重培养学生理解机械系统动力学行为并进行相关分析的能力及相关技术工作的适应能力。
课程主要内容:课程主要阐述机械动力学的理论和方法。
除绪论外、还包括机械振动学基础、机械刚体动力学、机械弹性动力学三大部分内容。
机械刚体动力学篇介绍动态静力分析方法、动力分析方法和以这两种分析方法为基础的综合方法。
机械弹性动力学篇介绍各种机构和机械系统的弹性动力分析方法和综合方法。
机械振动学基础既作为学习机械弹性动力学的基础知识,同时它也有着独立的、重要的工程应用价值。
目录绪论第一节学习机械动力学的主要意义第二节机械动力学研究的主要内容第一章刚性构件组成的机械系统动力学第一节曲柄连杆构动力学分析第二节差动轮系动力学分析第三节五杆机构动力学分析第二章简谐振动与频谱分析第一节简谐振动的表示方法第二节周期振动的频谱分析方法第三节非周期振动的频谱分析方法第三章单自由度系统的振动第一节概述第二节单自由度系统的振动第三节等效力等模型第四节隔振原理第五节等效黏性阻尼第六节非简谐周期激励的响应第七节单位脉冲的响应第八节任意激励的响应第九节任意支承激励的响应第四章多自由系统的振动第一节多自由系统的自由振动第二节动力减振器第三节多自由度系统的模态分析方法第四节确定系统固有频率与主振型的方法第五章连续系统的振动第一节弦的振动第二节杆的轴向振动第三节圆轴的扭转振动第四节梁的横向振动第五节连续系统固有频率的其他求解方法第六章弹性构件组成的机构系统力学第一节轴与轴系的振动第二节凸轮机构动力学第三节齿轮传动系统力学第四节带动传动系统动力学第七章非线性振动基础第一节非线性振动特性第二节非线性振动实例第三节相平面第四节平衡的稳定性及奇点的性质第五节相轨线课程主要教材:[1] 张策. 机械动力学。
提升机技术参数及设备选型过程

提升机技术参数及设备选型过程矿井提升机技术参数介绍及设备选型过程目录一、提升机相关参数二、选型过程三、MA标志查询办法四、提升系统设计内容与步骤。
五、电机功率选择与校核一、技术参数1、卷筒宽度和直径2、两卷筒中心距3、最大静张力、最大静张力差4、钢丝绳直径、绳速5、提升高度、容绳量6、减速器速比7、电机功率、极数、电机型号简介8、变位质量JK-2/2JK-2提升机技术参数表1、卷筒宽度和直径卷筒直径:提升机卷筒上第一层钢丝绳中心到卷筒中心距离的2倍。
绞车卷筒的直径为:卷筒缠绳表面到卷筒中心距离的2倍。
二者概念有差别,相差1根钢丝绳的直径。
卷筒宽度:卷筒两个挡绳板内侧直间的距离。
卷筒直径和宽度决定了卷筒使用钢丝绳的最大直径和容绳量2、最大静张力和最大静张力差JK-2型提升机的最大静张力161KN,2JK-2型绞车的最大静张力和最大静张力差分别为61KN、40KN。
钢丝绳的张力,也就是钢丝绳的拉力。
在单钩提升时,滚筒上只有一根钢丝绳,其拉力主要由提升容器、钢丝绳、提升载荷的重力构成。
拉力最大值在天轮的切点处,载荷越大、井筒越深、容器重量越大钢丝绳的拉力就越大。
最大静张力是针对提升机而言的,是强度允许的,滚筒上最大的拉力值双钩提升时,滚筒上有两条钢丝绳,重载钢丝绳的拉力大,轻载钢丝绳的拉力小,两根钢丝绳拉力的差值就是静张力差。
最大静张力差就是静张力差的最大值,是绞车强度所允许的,滚筒上两根钢丝绳拉力差的最大值。
通过以上分析,我们可以这样来理解二者。
对于单滚筒绞车,只有最大静张力,没有最大静张力差。
最大静张力就是绞车强度所允许的容器、钢丝绳、提升载荷自重的总和。
单位为重力单位:KN,最大静张力的值除9.8就为上述三者的质量。
即为提升量的质量,单位为:kg。
对于双滚筒绞车。
最大静张力也是绞车强度所允许的容器、钢丝绳、提升载荷自重的总和。
而最大静张力差是绞车强度所允许的钢丝绳、提升载荷自重的总和。
单位为重力单位:KN,KN除9.8就为提升量的质量,单位为:kg 最大静张力为什么分为载人和载物?二者的数值不同?是因为提升人员和物料时,其安全系数要求不同,提人要求9倍的安全系数,提物要求7.5倍的系数。
第三章 轮式工程机械行驶原理

v vOA v j
v
c os
r0k
vj
vj
v
c os
r0k
四、弹性车轮在变形地面上滚动运动学
轮胎与滚动表面同时发生变形是铲土运输机械最常 见的现象,轮胎与滚动表面变形对车轮运动的影响也最 为复杂。
当弹性轮胎在软土上滚动时,由于轮胎和土壤都发生 变形,当垂直载荷一定时,在软土上滚动的弹性轮胎的 变形是由轮胎刚度和土壤强度所决定的,所谓轮胎刚度 是指胎压和转换为胎压的胎壁刚度。若保持胎压不变, 而增加土壤的强度,轮胎变形将相应增大;若降低土壤 强度,则轮胎变形将减小。另外,在同一土壤条件下, 胎压降低,轮胎变形将增大;一种极端情况是地面为刚 性,另一种极端情况是刚性轮在软土上运行。
一般计算时可取rK=r,r为静力半径,即车轮在静 止状态下受法向载荷、轮胎有径向变形时,车轮
的几何中心到地面的垂直距离。
第三节 轮式机械的滚动阻力及附着性能
一、滚动阻力与滚动阻力系数 (一)车轮的滚动阻力
车轮滚动时,轮胎地面的接触区域会产生法 向、切向的相互作用括土壤变形的滚动阻力Ffl及轮胎 变形引起的滚动阻力Ff2。
n
又因为:Qg pbl pi pc bl
式中:pi — 轮胎气压;pc — 胎壁刚度换算的气压。
Ff1
n 1 b pi pc n
1
KC bK n n 1
注意:对于宽基轮胎,若其接地平面的长
度L小于轮胎宽度b,则承载面的短边不是b 而是L,在上式中用L代替b,另外,若轮胎 与土壤接触的曲面部分较大时,则不应忽略 曲面部分所承受的垂直载荷。
一、驱动轮力矩平衡方程式
机械动力学 mechanical dynamics-概述说明以及解释

机械动力学mechanical dynamics-概述说明以及解释1.引言1.1 概述机械动力学是研究物体在受到外部力的作用下所产生的运动规律的学科。
它是力学的一个重要分支,涵盖了机械系统的运动学和动力学分析。
在工程领域,机械动力学的研究对于设计和优化机械系统具有重要意义,能够帮助工程师了解和预测物体的运动状态。
本文将从机械动力学的基础概念入手,介绍机械系统的运动学和动力学分析方法。
通过对物体的位置、速度和加速度的研究,我们可以揭示出物体在运动过程中所受到的力和产生的运动状态。
这对于解决工程领域中的实际问题具有重要意义。
在接下来的章节中,我们将详细讨论机械动力学的基础知识,包括运动学分析和动力学分析方法。
通过对这些内容的深入探讨,我们可以更好地理解机械系统的运动规律,从而为工程实践提供有力的支持。
愿本文能对读者加深对机械动力学的理解起到一定的帮助。
1.2 文章结构本文分为引言、正文和结论三部分。
在引言部分,将简要介绍机械动力学的概念和重要性,以及本文的文章结构。
正文部分分为三个小节,分别为机械动力学基础、运动学分析和动力学分析,将详细探讨机械系统的运动规律和力学分析方法。
最后,在结论部分对本文进行总结,展望机械动力学在实际应用中的意义,并得出结论。
通过这样的结构,读者将能够全面了解机械动力学的基础知识和分析方法,帮助他们更好地理解和应用机械动力学理论。
1.3 目的本文旨在深入探讨机械动力学的基础理论和应用,通过对机械系统的运动学和动力学分析,揭示机械系统在不同条件下的运动规律和力学特性。
同时,通过对机械系统的力学性能进行研究,提供解决实际工程问题的有效方法和技术支持。
通过对机械动力学的详细分析,可以帮助工程师和研究人员更好地设计和优化机械系统,提高机械系统的性能和效率。
此外,本文还旨在为读者提供一个全面而系统的机械动力学学习和研究平台,帮助读者深入理解机械系统的工作原理和运行机制,从而促进机械领域的发展和进步。
阿基米德螺旋式提升机的动力分析与效率优化

阿基米德螺旋式提升机的动力分析与效率优化提升机是一种常见的物料输送设备,广泛应用于煤矿、建材、化工等行业。
阿基米德螺旋式提升机是一种常见的提升机类型,其通过螺旋锥形的螺旋叶片将物料从底部输送到顶部。
本文旨在对阿基米德螺旋式提升机的动力分析与效率优化进行探讨。
一、阿基米德螺旋式提升机的工作原理阿基米德螺旋式提升机的工作原理可以简单描述为:通过电机带动螺旋叶片转动,物料沿着螺旋叶片的螺旋路径向上运动,最终达到顶部。
具体来说,物料经过进料口进入提升机的螺旋叶片区域。
螺旋叶片的转动带动物料向上移动,物料在螺旋叶片作用下上升。
二、阿基米德螺旋式提升机的动力分析阿基米德螺旋式提升机的动力分析主要涉及到以下几方面:1. 转动动力:提升机的转动动力取决于所选用的电机功率和传动装置的效率。
在进行动力分析时,需要考虑到物料的自身重量、摩擦力、惯性力等因素。
2. 提升力:提升力是指将物料从底部提升到顶部所需的力量。
提升力的大小与物料的重量、物料与螺旋叶片的接触面积、物料与螺旋叶片之间的摩擦系数等因素有关。
3. 能效分析:在动力分析的基础上,对提升机的能效进行评估是至关重要的。
能效分析可以帮助我们了解提升机的能源消耗情况,并提出相应的优化建议。
三、阿基米德螺旋式提升机的效率优化为了提高阿基米德螺旋式提升机的工作效率,可以采取以下几种优化措施:1. 优选电机功率:合理选择电机功率能够提高提升机的转动效率。
功率过大会浪费能源,功率过小则无法满足物料的提升要求。
2. 优化传动装置:提升机的传动装置在工作过程中会存在一定的能量损失。
通过优化传动装置,选用效率高的传动装置,如齿轮传动或液力传动,可以减少能量损失。
3. 减少摩擦损失:在物料与螺旋叶片接触的区域,适当增加润滑措施可以减少摩擦损失,提高提升机的效率。
4. 加装电子调速装置:通过加装电子调速装置,可以实现根据物料的需要对提升机进行调速,使提升机在不同工况下都能够以最佳效率运行。
《落地式摩擦矿井提升机动力学特性分析与振动抑制》
《落地式摩擦矿井提升机动力学特性分析与振动抑制》一、引言在矿井作业中,落地式摩擦矿井提升机是关键设备之一,负责运送人员和物料。
其动力学特性的稳定性和振动抑制的效率直接关系到矿井作业的安全性和效率。
本文旨在分析落地式摩擦矿井提升机的动力学特性,并探讨有效的振动抑制方法。
二、落地式摩擦矿井提升机动力学特性分析1. 结构与工作原理落地式摩擦矿井提升机主要由驱动系统、导向系统、装载卸载系统和提升钢丝绳等部分组成。
驱动系统提供动力,通过导向系统和钢丝绳的配合,实现提升机的升降运动。
2. 动力学模型建立根据提升机的结构和工作原理,建立其动力学模型。
该模型应包括提升机的质量、刚度、阻尼等参数,以及外部载荷和摩擦力等因素的影响。
3. 动力学特性分析通过对动力学模型的分析,可以得出提升机的动力学特性。
包括提升机的运动规律、速度和加速度变化、以及在不同工况下的性能表现等。
这些特性对于评估提升机的稳定性和安全性具有重要意义。
三、振动产生原因及影响1. 振动产生原因落地式摩擦矿井提升机的振动主要源于驱动系统的波动、钢丝绳的摆动、装载卸载过程中的冲击等因素。
此外,设备自身的制造和安装误差也可能导致振动。
2. 振动影响振动会影响提升机的稳定性和安全性,可能导致设备故障、零部件磨损加剧、甚至发生安全事故。
因此,必须采取有效的振动抑制措施。
四、振动抑制方法1. 优化设计通过优化提升机的结构设计和参数配置,降低设备的刚度波动和外部载荷的冲击,从而减少振动。
例如,改进驱动系统的设计,使动力输出更加平稳;优化钢丝绳的布置和张力控制等。
2. 安装减震装置在提升机上安装减震装置,如橡胶减震器、液压减震器等,以吸收和消耗振动能量,降低设备的振动幅度。
同时,减震装置还能提高设备的抗冲击性能,保护设备和人员的安全。
3. 控制系统优化通过优化提升机的控制系统,实现精确的速度和位置控制,减少装载卸载过程中的冲击和振动。
例如,采用先进的控制算法和传感器技术,实现设备的智能控制和故障诊断。
机械机构运动学与运动分析

机械机构运动学与运动分析一、引言机械机构是现代工程领域中的重要组成部分,它们在各种工业、农业和日常生活中发挥着关键作用。
机械机构的设计必须基于对其运动学和运动分析的深入理解。
本文旨在探讨机械机构的运动学和运动分析的基本概念和方法。
二、机械机构与运动学机械机构是由若干个连接在一起的零件组成的,它们通过运动来实现特定的功能。
运动学是研究物体在空间中的运动规律的学科,而机械机构的运动学研究则着重于描述机械机构中各个零件之间的运动关系。
1.机械机构的基本元素机械机构的基本元素包括:连杆、齿轮、凸轮等。
连杆是机械机构中最常见的元素之一,它有助于转换直线运动为旋转运动。
齿轮则可用于改变机械机构中各个零件的运动速度和方向。
2.机械机构的动力学分析运动学只是研究机械机构中各个元素的运动状态和规律,并不涉及力的平衡和运动。
而动力学分析则加入了力的考虑,研究机械机构中各个元素的力学特性和运动规律。
三、机械机构的运动分析方法为了理解机械机构中的运动规律,我们需要使用一些特定的运动分析方法。
下面将介绍几种常见的运动分析方法。
1.迭代法迭代法是一种基本的分析方法,它通过反复迭代计算来解决机械机构的运动学问题。
迭代法常用于求解复杂的运动学问题,尤其是关节齿轮传动系统等。
2.矢量法矢量法是一种图形解法,它使用矢量图形来表示机械机构中各个零件的运动状态和关系。
通过绘制矢量图形,我们可以直观地看出机械机构的运动规律。
3.解析法解析法是一种使用数学方程来分析机械机构运动的方法。
它通过建立各个零件之间的数学方程,从而求解机械机构的运动规律。
四、机械机构的应用案例机械机构的运动学和运动分析在各个领域中都有广泛的应用。
以下是几个典型的应用案例。
1.自行车变速系统自行车变速系统是一个典型的机械机构,它通过链条和齿轮传动来改变自行车的速度和力矩。
运动学和运动分析可以帮助我们理解自行车变速系统中各个零件之间的运动关系,从而优化自行车的性能。
2.工业机械手臂工业机械手臂是用于自动化生产的关键设备,它具有多个自由度和复杂的运动模式。
动力学模型与运动学模型

动力学模型与运动学模型一、引言动力学模型和运动学模型是机械系统控制领域中的两个重要概念。
它们分别描述了机械系统的运动和力学特性,对于机器人、航空器等自动化设备的控制和优化具有重要意义。
本文将从定义、应用场景、建模方法等方面详细介绍这两个概念。
二、动力学模型1.定义动力学模型是描述物体在外界作用下受到的力和加速度之间关系的数学模型。
它包含了牛顿第二定律(F=ma)以及其他相关的物理定律,可以用来计算物体在不同外界作用下的运动状态。
2.应用场景动力学模型广泛应用于机器人、飞行器、汽车等自动化设备中。
例如,在机器人控制中,通过建立机器人动力学模型,可以预测机器人在执行特定任务时所需的能量消耗和速度变化;在飞行器控制中,通过建立飞行器动力学模型,可以预测飞行器在不同气流条件下的稳定性和可控性。
3.建模方法建立动力学模型需要根据实际情况选择合适的数学方法。
一般来说,可以采用拉格朗日方程、哈密顿方程、牛顿-欧拉方程等方法进行建模。
具体的建模过程需要根据实际情况进行调整和优化。
三、运动学模型1.定义运动学模型是描述物体在不考虑外界作用下的运动状态的数学模型。
它通常包含位置、速度和加速度等基本参数,可以用来计算物体在不同时间点的位置和速度。
2.应用场景运动学模型广泛应用于机器人、汽车等自动化设备中。
例如,在机器人控制中,通过建立机器人运动学模型,可以预测机器人在执行特定任务时所需的轨迹和速度变化;在汽车控制中,通过建立汽车运动学模型,可以预测汽车在不同驾驶条件下的行驶轨迹和速度变化。
3.建模方法建立运动学模型需要根据实际情况选择合适的数学方法。
一般来说,可以采用欧拉角、四元数等方法进行建模。
具体的建模过程需要根据实际情况进行调整和优化。
四、动力学模型与运动学模型的区别与联系1.区别(1)定义不同:动力学模型描述物体在外界作用下的运动状态,而运动学模型描述物体在不考虑外界作用下的运动状态。
(2)参数不同:动力学模型包含力和加速度等参数,而运动学模型包含位置、速度和加速度等参数。
机械动力学第三章课件

若作用于构件 i上的作用力为Fi,力矩为Mi ,力Fi 作用
点的速度为ui ,构件的角速度为ω i ,则其瞬时功率为:
N Ni ( Fi i cos i Mii )
i 1 i 1 n n
dE dW 运动方程的一般表达式为: Ndt
2 d [ ( miv Si / 2 J Si i2 / 2)] [ ( Fi v i cos i M i i )]dt i 1 i 1 n n
机械系统的等效动力学模型
机械系统是复杂多样的,在进行动力学研 究时,通常要将复杂的机械系统,按一定 的原则简化为一个便于研究的等效动力学 模型。 为了研究单自由度机械系统的真实运动, 可将机械系统等效转化为只有一个独立运 动的等效构件,等效构件的运动与机构中 相应构件的运动一致。
等效转化的原则是:
二、作用在机械上的力
当忽略机械中各构件的重力以及运动副中的摩擦力时, 作用在机械上的力可分为工作阻力和驱动力两大类: 1. 工作阻力 工作阻力是指机械工作时需要克服的工作负荷,它决 定于机械的工艺特性。
在机械的生产过程中,有些生产阻力为常数,有些是位
置的函数,还有一些是速度的函数。
二、作用在机械上的力
1
v3 ) F3
Fe M 1 (
2 v3 d me (v3 ) Fe ( s3 , v3 , t )v3 dt 2
(能量微分形式的运动方程式)
小结:
若取转动构件为等效构件,有:
J e [m i (
i 1
n
n
v Si
) 2 J Si (
i 2 ) ]
v3 vc 2 l
v 4 v c sin 2 2 l sin 2
开题报告-煤矿主井提升设备选型设计(单绳缠绕式提升机)

开题报告
4.研究的总体安排和进度计划:
1~2周:实习调研,查询相关文献资料,完成开题报告及外文翻译等工作;
3~4周:箕斗的选型计算、提升钢丝绳的选择计算、提升机的选择计算、预选电动机计算;
5~6周:提升机加减速度的确定、运动学参数计算、动力学参数计算、电动机功率校验;
7~8周:提升机电耗及计算,绘制主要零部件图;
9~10周:机械系统的总装配图绘制;
11~12周:完成相关设计及编写设计说明书,完成设计图纸绘制;
13周:完善设计图及说明书,装订说明书,准备答辩。
5.主要参考文献:
[11周乃荣等.矿山固定机械手册.煤炭工业出版社.1986
[2]程居山等.矿山机械.中国矿业大学出版社.1997
[3]孙玉蓉等.矿井提升设备.煤炭工业出版社.1995
[4]方稹权.煤矿机械.中国矿业大学出版社.1987
[5]夏荣海等.矿井提升设备.中国矿业大学出版.1987
[6]晋民杰.矿井提升机械.机械工业出版社.2On
[7]李瑞春等.矿井提升设备使用与维护.机械工业出版社.2013
[8]李玉瑾等.矿井提升系统基础理论.煤炭工业出版社.2013
[9]钟春晖等.矿井运输与提升.化学工业出版社.2013
[10]洪晓华.矿井运输提升.中国矿业大学出版社.2005
[11]本书编委会.矿井提升机故障处理和技术改造.2005。
矿山机电设备维修-模块1-第7单元七 矿井提升运动学及动力学
图1-7-1箕斗提升速度图
表1-7-1 箕斗提升休 止时间
采用等加速速度图,在速度的转折点会 产生力的冲击,并造成电网尖峰载荷。采用 抛物线速度图,即在加速段使加速度以直线 衰减,速度平稳上升到最大速度,可使冲击 力矩和尖峰载荷都相应降低。但是,在相同 的 和a1条件下,抛物线速度图的加速时间 是梯形速度图的2倍,对于交流拖动改变转 子外加电阻的调速方式,加速时间的延长会 增大电阻中的附加能耗,故一般不采用抛物 线速度图。
4 单元四 矿井提升机的拖动与控制
概述
8 现场教学:矿井提升设备使用及
常见故障、事故分析、处理与预 防
单元七 提升钢丝绳的结构、分类、维护与试验
一、提升速度图
图1-7-1为交流拖动、双箕斗提升系统经常采用的等 加速速度图,该速度图
包括六个阶段,故称为六阶段速度图。图中t0,t1,t2,t3, t4,θ分别表示初加速、主加速、等速、减速、爬行、停车 休止六个阶段的时间。在初加速阶段,井下箕斗由装载处 提起,井上空箕斗在卸载曲轨内运行,为了减少容器通过 卸载曲轨时对井架的冲击,一般限制速度在1.5m/s以下; 在等速阶段以最大提升速度运行;主加速度a1和减速度a3 依据《安全规程》确定;在爬行阶段重载箕斗进入卸载曲 轨,为减少冲击和便于准确停车,容器以0.4~0.5m/s低速 爬行,爬行距离h4=2.5~5m。停车休止时间θ的取值见表17-1。
THANKS 谢谢您的观看与聆听
能承受的最大扭矩
。
03
02
按电动机过载能力计算允许的最大加速 度。电动机作用于卷筒圆周上的最大拖 动力为 ( —电动机额定拖动力; —电动 机额定力矩与最大力矩之比),在电动 机依次切除电阻的加速过程中,拖动力 是变化的,一般按电动机平均出力不大 于0.75 计算。
机械系统动力学 第三章 机械系统运动微分方程的求解2
t) t)
x(t) y(t)
y(t)t f (x, y,
t)t
校正: xy((tt
t) t)
x(t) (y(t) y(t y(t) ( f (x, y,t)
t))t / 2 f (x(t t),
y(t
t),
t
t
))t
/
2
3-2机械系统的运动方程求解方法-数值法
3-2-2 Newmark- 法 Newmark- 法是线性加速度法之一。对于具有关于时间2 阶导数的单自由度机械系统运动微分方程式,其 x(t t) 的Talar展开式:
3-2机械系统的运动方程求解方法-数值法
3-2-3 Runge-Kutta法 工程中应用最多的是4阶Runge-Kutta法,其迭代公式为
yn1
yn
h 6 (K1
2K2
2K3
K4 )
K1 f ( xn , yn )
K2
f ( xnh/2 , yn K1)
K3
f ( xnh/2 , yn
对于具有非定传动比的机构,其等效力矩一般与等效构 件转角有关。若其发动机或工作机的机械特性与机械的 运动速度有关,如以电动机为动力源的机械,则其等效 力矩就是等效构件的转角和角速度的函数即 Me Me , 。 工程中大量常见的机械系统都属于这种情况。
由于 Me Me , Je Je , 根据力矩形式的运动
yn1 yn h( xn , yn , h)
其中 称增量函数,可表示为
r
( xn , yn , h)= ciKi
K1
i 1
f (xn , yn )
i 1
Ki
f (xn
ih, yn
h ijK j )
第三章流体运动学与动力学基础主要内容基本概念欧拉运动微分方程

第三章流体运动学与动力学基础主要内容z基本概念z欧拉运动微分方程z连续性方程——质量守恒*z伯努利方程——能量守恒** 重点z动量方程——动量守恒** 难点z方程的应用第一节研究流体运动的两种方法z流体质点:物理点。
是构成连续介质的流体的基本单位,宏观上无穷小(体积非常微小,其几何尺寸可忽略),微观上无穷大(包含许许多多的流体分子,体现了许多流体分子的统计学特性)。
z空间点:几何点,表示空间位置。
流体质点是流体的组成部分,在运动时,一个质点在某一瞬时占据一定的空间点(x,y,z)上,具有一定的速度、压力、密度、温度等标志其状态的运动参数。
拉格朗日法以流体质点为研究对象,而欧拉法以空间点为研究对象。
一、拉格朗日法(跟踪法、质点法)Lagrangian method1、定义:以运动着的流体质点为研究对象,跟踪观察个别流体质点在不同时间其位置、流速和压力的变化规律,然后把足够的流体质点综合起来获得整个流场的运动规律。
2、拉格朗日变数:取t=t0时,以每个质点的空间坐标位置为(a,b,c)作为区别该质点的标识,称为拉格朗日变数。
3、方程:设任意时刻t,质点坐标为(x,y,z) ,则:x = x(a,b,c,t)y = y(a,b,c,t)z = z(a,b,c,t)4、适用情况:流体的振动和波动问题。
5、优点:可以描述各个质点在不同时间参量变化,研究流体运动轨迹上各流动参量的变化。
缺点:不便于研究整个流场的特性。
二、欧拉法(站岗法、流场法)Eulerian method1、定义:以流场内的空间点为研究对象,研究质点经过空间点时运动参数随时间的变化规律,把足够多的空间点综合起来得出整个流场的运动规律。
2、欧拉变数:空间坐标(x ,y ,z )称为欧拉变数。
3、方程:因为欧拉法是描写流场内不同位置的质点的流动参量随时间的变化,则流动参量应是空间坐标和时间的函数。
位置: x = x(x,y,z,t) y = y(x,y,z,t) z = z(x,y,z,t) 速度: u x =u x (x,y,z,t ) u y =u y (x,y,z,t ) u z =u z (x,y,z,t )同理: p =p (x,y,z,t ) ,ρ=ρ(x,y,z,t) 说明: x 、y 、z 也是时间t 的函数。
第三节 提升设备的运动学计算
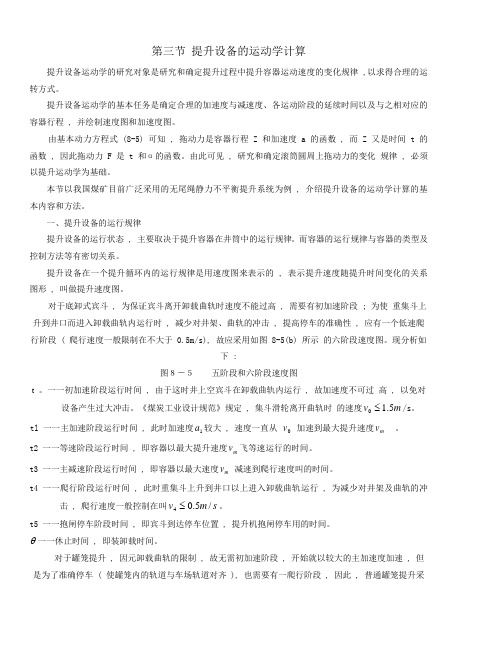
第三节 提升设备的运动学计算提升设备运动学的研究对象是研究和确定提升过程中提升容器运动速度的变化规律 ,以求得合理的运转方式。
提升设备运动学的基本任务是确定合理的加速度与减速度、各运动阶段的延续时间以及与之相对应的容器行程 , 并绘制速度图和加速度图。
由基本动力方程式 (8-5) 可知 , 拖动力是容器行程 Z 和加速度 a 的函数 , 而 Z 又是时间 t 的函数 , 因此拖动力 F 是 t 和α的函数。
由此可见 , 研究和确定滚筒圆周上拖动力的变化 规律 , 必须以提升运动学为基础。
本节以我国煤矿目前广泛采用的无尾绳静力不平衡提升系统为例 , 介绍提升设备的运动学计算的基本内容和方法。
一、提升设备的运行规律提升设备的运行状态 , 主要取决于提升容器在井筒中的运行规律。
而容器的运行规律与容器的类型及控制方法等有密切关系。
提升设备在一个提升循环内的运行规律是用速度图来表示的 , 表示提升速度随提升时间变化的关系图形 , 叫做提升速度图。
对于底卸式宾斗 , 为保证宾斗离开卸载曲轨时速度不能过高 , 需要有初加速阶段 ; 为使 重集斗上升到井口而进入卸载曲轨内运行时 , 减少对井架、曲轨的冲击 , 提高停车的准确性 , 应有一个低速爬 行阶段 ( 爬行速度一般限制在不大于 0.5m/s), 故应采用如图 8-5(b) 所示 的六阶段速度图。
现分析如下 :图8-5 五阶段和六阶段速度图t 。
一一初加速阶段运行时间 , 由于这时井上空宾斗在卸载曲轨内运行 , 故加速度不可过 高 , 以免对设备产生过大冲击。
《煤炭工业设计规范》规定 , 集斗滑轮离开曲轨时 的速度m v 5.10≤/s 。
tl 一一主加速阶段运行时间 , 此时加速度1a 较大 , 速度一直从 0v 加速到最大提升速度m v 。
t2 一一等速阶段运行时间 , 即容器以最大提升速度m v 飞等速运行的时间。
t3 一一主减速阶段运行时间 , 即容器以最大速度m v 减速到爬行速度叫的时间。
智能制造编程与调试教程

智能制造编程与调试教程第一章智能制造编程基础 (2)1.1 编程概述 (2)1.1.1 任务分析 (2)1.1.2 动作规划 (3)1.1.3 编程实现 (3)1.1.4 调试与优化 (3)1.2 编程语言简介 (3)1.2.1 Python (3)1.2.2 C (3)1.2.3 MATLAB (3)1.2.4 ROS(Robot Operating System) (3)1.3 编程环境搭建 (3)1.3.1 Python 环境搭建 (3)1.3.2 C 环境搭建 (4)1.3.3 MATLAB 环境搭建 (4)1.3.4 ROS 环境搭建 (4)第二章坐标系与运动学 (4)2.1 坐标系介绍 (4)2.2 运动学基础 (4)2.3 坐标变换与运动规划 (5)第三章传感器与执行器集成 (5)3.1 传感器概述 (5)3.2 执行器概述 (6)3.3 传感器与执行器的集成 (6)第四章控制策略 (7)4.1 控制策略概述 (7)4.2 PID控制 (7)4.3 逆运动学控制 (7)第五章视觉系统 (8)5.1 视觉系统概述 (8)5.2 图像处理基础 (8)5.3 视觉伺服 (9)第六章路径规划与导航 (9)6.1 路径规划概述 (9)6.2 路径规划算法 (9)6.2.1 基于图的搜索算法 (9)6.2.2 基于采样的方法 (10)6.2.3 基于多项式的路径规划 (10)6.3 导航技术 (10)第七章编程语言与工具 (10)7.1 编程语言概述 (10)7.2 编程工具介绍 (11)7.3 编程实例分析 (11)第八章编程实践 (12)8.1 实践项目概述 (12)8.2 编程步骤与技巧 (12)8.3 调试与优化 (13)第九章调试技术 (13)9.1 调试概述 (13)9.2 调试工具与方法 (14)9.2.1 调试工具 (14)9.2.2 调试方法 (14)9.3 常见问题与解决方案 (14)9.3.1 硬件问题 (14)9.3.2 软件问题 (14)9.3.3 控制系统问题 (15)第十章故障诊断与维护 (15)10.1 故障诊断概述 (15)10.2 常见故障分析 (15)10.3 维护与保养 (16)第十一章智能制造与协同作业 (16)11.1 智能制造概述 (16)11.2 协同作业技术 (17)11.3 应用案例解析 (17)第十二章智能制造编程与调试发展趋势 (18)12.1 技术发展趋势 (18)12.2 行业应用前景 (18)12.3 人才培养与挑战 (19)第一章智能制造编程基础科技的不断发展,智能制造已成为我国制造业转型升级的重要方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
2 1 0 t/t0
o
t0 t
图3-6-1 三角形与梯形速度图
0.5 V/V0
提升速度的规定:
竖井用罐笼升降人员的加速度不得超过0.75m/s2,其最大速 度不得超过下式的计算值;且不能大于12m/s。
Vmax 0.5 H
竖井升降物料时,提升容器的最大速度,不得超过下式的计算 值:
Vmax 0.6 H
天轮变位到卷筒圆周上的重量:
(GD 2 ) t Git Dt2 或按经验公式计算:
Git 1372 Dt2
(对于装配式天轮) (对于铸造式天轮)
Git 882 Dt2
提升机卷筒及减速器的变位重量(Gij+Gic)可直接由提升机的 技术性能表中查得
电动机近似容量计算:
N T jVmax 1000
Vmax
t0
V4
o
V0
t
t1 t2 T1 t3 t4
t5
a
a1
t
a3 a5
a0
o
图3-6-4 六阶段速度图
◆如多绳提升底卸式箕斗用气缸带动的活动直轨卸载时可采用 非对称(具有爬行阶段)的五阶段速度图(如图3-6-5所示)。
v
Vmax
0 t1 a t2 T1
t t4 t5
t3
a1
V4
图3-6-5 非对称五阶段速度图
2 变位质量的计算 提升系统各移动部分的加速度等于卷筒周上的线加速度, 因而这些部分的变位质量就等于它们的实际质量,所以仅需将 转动部分的质量变位到卷筒圆周上(直线运动部分直接相加)。
提升设备工作时,卷筒和缠于其上的钢丝绳、减速齿轮、 电动机转子及天轮作旋转运动,而提升容器及其所装的货载、 未缠绕在卷筒上的钢丝绳作直线运动。计算公式如下:
(GD 2 ) x x 2 Gix ( ) 2 D
(3-6-24)
利用上式,若已知某旋转体的回转力矩(GD2)X、卷筒直径 D以及该物体的角速度ωx,便能求出该旋转体变位到卷筒圆周上 的重量。 变位重量计算实例说明:
电动机转子的变位到卷筒圆周上的重量:
设电动机转子的回转力矩为(GD2)d及角速度ωd为,则电动机转子变位 到卷筒圆周上的重量为: (GD 2 ) d 2 Gid i 2 D d i 为减速器传动比。
令q-p=Δ,则: F j KQ ( H 2 x)
(3-6-21)
(3-6-22)
根据Δ值不同,可能出现三种提升系统:
Δ=0时,称为等重尾绳提升系统;
Δ>0时,称为重尾绳提升系统; Δ<0时,称为轻尾绳(很少用)或无尾绳提升系统。 其中,以等重尾绳提升应用较多。
当采用等重尾绳提升时,q=p,Δ=0,则根据(3-6-22)式得:
一次提升运行时间:
t2
h2 Vmax
(3-6-13)
T1 t 0 t1 t 2 t 3 t 4 t 5
(3-6-14)
一次提升全时间
T T1
每小时提升次数
3600 n T
每年生产能力
An
t r t s nQ C
三、提升设备的动力学
为使提升系统运动,提升电动机作用在卷筒轴上的旋转力矩, 必须克服系统作用在卷筒轴上的静阻力矩和惯性力矩。即:
第六节 提升设备的运动学和动力学
一、提升速度的确定
在一次提升过程中,提升速度是变化的。如用横坐标表示容器运动 的延续时间,纵坐标表示相应的运动速度,则绘出容器随时间变化的 速度曲线,就称之为提升速度图。提升速度图上速度曲线所包含的面 积,为提升容器在一次提升时间内所走过的路程,即提升高度。
v 6 5 t/t0 V t 4 V0
现以六阶段速度图为例进行运动学计算: 已知条件:提升高度H,最大提升速度Vmax和箕斗的卸 载高度h0;选取箕斗进行卸载曲轨的速度V0、V4、爬行高度 h4=h0+0.5~2m、及减速度a5;并按前面所述方法确定加 速度a1及减速度a3,则速度图中各参数的计算如下。
空箕斗在卸载曲轨内的加速度运行时间t0及加速度a0:
M M j Mg
(3-6-15)
因为卷筒直径是不变的,故力矩的变化规律可用力的变化规 律来表示,故上式变为: F F j Fg
Fg Ma
F F j Ma
(8-16)
上式即为等直径提升设备的动力学基本方程式。
1、 提升静力学及提升系统的静力平衡问题 提升静阻力为上升和下放两根钢丝绳的静拉力差加上矿井 阻力,即: (3-6-17) F j T j .s T j . x W
在一次提升过程中,提升量及矿井阻力(KQ)是不变的,故静 阻力变化就是由于钢丝绳重量的改变所致,即钢丝绳重量使下放绳 的静拉力不断增加,同时使上升绳的静拉力逐渐减小,结果使两根 钢丝绳作用在卷筒圆周上的静拉力差减小。这种提升系统称为静力 不平衡系统。
提升系统的静力不平衡对提升工作是不利的,特别是在矿井很 深和钢丝绳很重的情况上,就会使提升开始时静阻力Fj大为增加, 甚至要增加电动机容量;而在提升终了时,可能出现PH>KQ,静 阻力Fj变为负值,亦即静阻力矩Mj将帮助提升,从而增加了过卷的 可能性,使提升工作不安全,此时为了闸住提升机,必须用较大的 制动力矩。
V t1 max a1
Vmax t1 h1 2
(3-6-1)
减速运行时间t3及高度h3:
t3 Vmax a3
h3
Vmax t 3 2
(3-6-2)
均速运行高度h2及时间t2:
h2 H h1 h3
t2
h2 Vmax
(3-6-3)
一次提升运行时间:
T1 t1 t 2 t 3
二、提升设备的运动学
1、罐笼提升运动学
罐笼提升采用三阶段梯形速度图,如图3-6-2所示。 v
v
0
1
2
t
t1
t2 T1 T
t3
a
a1
t
a2
图3-6-2 三阶段速度a1 和等减速度a3时,在 加速和减速阶段,速度 0 t1 t2 是按与时间轴成β1和 T1 β2角的直线变化,故 a 三阶段速度图为梯形。 交流电动机拖动的罐笼 提升设备采用这种速度 0 图。 t1
ΔTj—提升钢丝绳的静拉力差,N; η—减速器传动效率,一级传动取0.9;二级传动取0.85; ρ—动力系数,即考虑惯性力影响的系数,对于单绳罐笼提升取1.3~1.4; 单绳箕斗提升取1.2~1.3;对于多绳箕斗提升取1.1~1.2;对于单容器提 升ρ可取小值。
3、 罐笼提升动力学
F F j Ma
t0 2h0 V0
a0
V0 t0
(8-8)
箕斗在卸载曲轨外的加速运行时间t1及高度h1:
t1 Vmax V0 a1
h1
1 (Vmax V0 )t1 2
(8-9)
重箕斗在卸载曲轨内的减速运行时间t5及高度h5: V 1 t5 4 (8-10) h5 V4 t 5 a5 2
F j KQ p( H 2 x)
式中 当x=0时,
(3-6-20)
K——矿井阻力系数,罐笼提升时K=1.2;箕斗提升时K=1.5。
F j .1 KQ pH
当x=H/2时,即两罐笼相遇时:
F j 2 KQ
当x=H时,即提升终了时:
F j 3 KQ pH
由此可见,Fj=f(x)是一条向下倾斜的直线,如图3-6-7中直线 1-1所示。
重箕斗在卸载曲轨内等速运行时间t4: h t4 4 V4
Vmax V4 a3
(3-6-11)
箕斗在卸载曲轨外的减速运行时间t3及距离h3:
t3
h3
Vmax V4 t3 2
(3-6-12)
箕斗在卸载曲轨外的等速运行距离h2及时间t2:
h2 H h0 h1 h3 h4 h5
F j KQ
(3-6-23)
由此可见,Fj=f(x)是一条平行于横坐标的直线,如图3-6-7中 直线2-2。在整个提升过程中,静阻力保持常数的提升系统称为静 力平衡系统。 采用尾绳提升系统,平衡了静力,但也带来了下述缺点:
双容器提升不能同时进行几个水平的提升工作;
尾绳重量使提升系统运动部分的质量增加,也增加了提升主轴的 载荷; 增加了尾绳的设备费和维护检查工作,并使挂绳、换绳工作复杂。 因此,对于单绳提升只有在矿井较深时,采用尾绳平衡系统才 是合理的。一般单绳罐笼提升高度大于400m,单绳箕斗提升高度 大于600m时,才考虑采用尾绳平衡提升系统。对于多绳提升一般 都采用等重尾绳提升系统。
由
F j KQ ( H 2 x)
得等直径提升设备的动力方程式
a a1 Vmax
Vmax
为了验算提升设备的提升能力,应对速度图各参数进行计算: 计算梯形速度图各参数时的已知条件: 1)、提升高度H及最大提升速度Vmax。 2)、提升加速度a1和减速度a3 提升人员时不得大于0.75m/s2;提升货载时不宜大于 1m/s2;一般对于较深矿井采用较大的加、减速度,浅井采用较小的 加、减速度。相应的加减速时间:手工操作时t1(t3)≥5s;自动化操作 时t1(t3)≥3s。 梯形速度图各参数的计算如下: 加速运行时间及高度:
a3
a5
0
t
箕斗进出卸载曲轨的运行速度,以及在其中运行的加、减速度,通常按 下述数值选取: 空箕斗离开卸载曲轨时的速度V0≤1.5m/s,加速度a0≤0.3m/s2; 重箕斗进入卸载曲轨时的速度V4,对于对称五阶段速度图, V4≤1m/s,对于六阶段速度图和非对称五阶段速度图V4≤0.3~0.5m/s, 相应的最终减速度a5 (a4)应使最后阶段的时间t5(t4)≈1s。