基于安川工业机器人自动上下料工作站系统设计
论机器人的数控机床自动上下料应用系统设计

论机器人的数控机床自动上下料应用系统设计2.云南省机电一体化重点实验室云南昆明650031摘要:在制造业领域,加工企业习惯以人工操作机床的方式,对上下料进行加工,此类技术工艺存在一定缺陷。
为提高工艺水平和加工效率,加工企业有必要应用机器人,对机床上下料工装进行合理设计。
本文浅析了基于机器人的数控机床上下料工装设计与应用意义,结合相关案例,探究了基于机器人的数控机床上下料工装设计与应用,以期为相关研究提供借鉴。
关键词:机器人;机床;工装设计引言:在制造业领域,加工企业越来越注重对机器人进行应用,这推动了生产加工方式的转变。
在操作数控机床的过程中,对机器人进行应用,配合机床上下料,必须做好工装设计。
工装设计要确保稳定可靠的工件定位,并保障承载力和夹持力充足。
一、基于机器人的机床上下料工装设计与应用意义在制造业领域,加工企业在加工生产单一产品时,或者生产加工少量产品时,习惯以人工操作机床的方式,完成上下料。
对于品种规格较多的产品和产量较大的产品进行加工,此类作业方式即呈现出缺陷:人工作业具有较大的劳动强度和较高的危险系数,且制造加工效率低,难以保障稳定的产品质量;专机具有较为复杂的结构,需耗费较高的运营成本,依托流水线实施自动化生产难以保障生产效能和经济效益;专机上下料仅适合对某种单一产品进行加工,难以实现柔性加工。
上述方式显然存在一定弊端,可应用机器人对之进行改进,对机床上下料形成优化设计,其意义如下:(1)能实现高效率的生产加工。
利用机器人配合数控机床,对批量较大的产品和小零部件进行加工,能通过机器人实施抓取零件、上下料、装夹、翻转、移位、调头等各项操作,比传统人工方式耗费的成本要低,并能增强生产加工的高效性。
(2)能降低运行机床耗费的成本。
对机器人进行应用,辅助机床实施上下料操作,能实现对作业区域的准确定位,并对工作频次进行调节,能良好满足各类产品的加工需求,并保障产品加工质量。
还能降低机床损耗,简化维修涉及的各项工作。
机器人上下料工作站实训系统设计
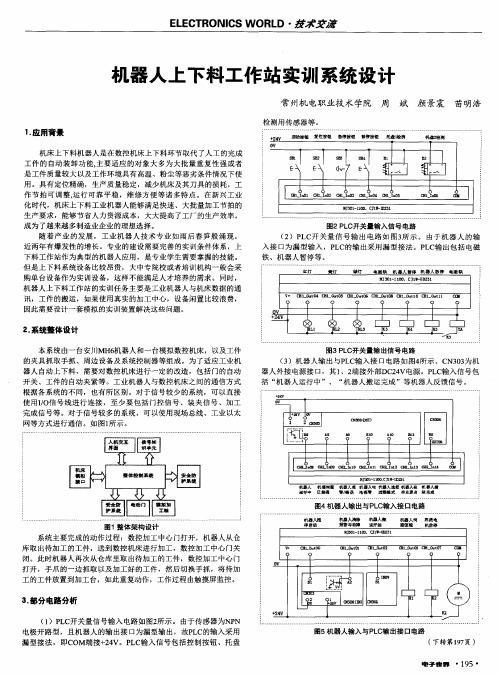
工 件 的 自动 装 卸 功 能, 主 要适 应 的对 象 大 多为 大 批 量重 复性 强 或 者 是工 件 质量 较大 以及 工 作环 境 具有 高温 、粉 尘 等恶 劣 条件 情况 下使 用 。具 有定 位精 确 ,生 产质 量稳 定 ,减 少机 床及 其 刀具 的损 耗 ,工 作 节 拍可 调 整 , 运 行 可 靠 平稳 ,维 修 方便 等 诸 多 特 点 。在 新 兴 工业 化时 代 ,机 床上 下料 工 业机 器人 能够 满 足快 速 、大 批量 加 工节 拍 的 生产 要求 ,能够 节省 人 力资 源成 本 ,大 大提 高 了工厂 的生产 效 率 , 成 为 了越 来越 多制 造业 企业 的理 想 选择 。 随着 产 业 的发 展 ,工 业 机 器 人 技 术 专业 如 雨后 春 笋 般 涌 现 , 近 两 年有 爆 发性 的增 长 。专 业 的建设 需 要完 善 的实训 条 件体 系 ,上 下料 工作 站作 为 典型 的机 器 人应 用 ,是 专业 学生 需要 掌 握 的技 能 。 但 是上 下料 系 统 设备 比较 昂贵 ,大 中专 院校 或者 培训 机 构一 般会 采 购 单 台设备 作 为实 训 设备 ,这 样不 能满 足 人才 培养 的需求 。同时 , 机器 人 上 下料 工作 站 的实 训任 务主 要是 工业 机 器人 与机 床 数据 的通 讯 ,工 件 的搬运 ,如果 使 用真 实 的加 工 中心 ,设 备闲 置 比较 浪费 , 因此 需 要设 计一 套模 拟 的实 训装置 解 决这 些 问题 。
2 . 系统整体设计
本 系统 由一 台安 川MH 6 机 器 人和 一 台模拟 数控 机床 ,以及 工件 的夹 具抓 取 手抓 、周 边 设备 及系 统 控制 器等 组成 。为 了适应 工业 机 器 人 自动 上 下料 , 需要对 数 控机 床进 行 一定 的 改造 ,包 括 门 的 自动 开 关 、工 件 的 自动夹 紧等 。工业 机器 人 与数 控机 床 之间 的通 信方 式 根 据各 系 统 的不 同 ,也有 所 区别 。对 于信 号 较少 的 系统 ,可 以直 接 使 用I / O信 号 线 进行 连 接 ,至 少 要 包 括 门控 信 号 、装 夹 信 号 、加 工 完 成信 号 等 。对 于信 号较 多 的系 统 ,可 以使 用现 场 总线 、工 业 以太 网等方 式进 行 通信 。如 图 1 所示。 Nhomakorabea搿
自动上下料工作站仿真系统设计

自动上下料工作站仿真系统设计摘要:由于生产效率低、劳动强度高、安全防护不足,传统机械加工行业正在逐步被灵活的制造系统所取代,该系统将材料处理、传输、加工和检测相结合。
柔性制造系统是指柔性制造系统(FMS),它由统一的信息控制系统、材料仓库和运输系统以及一组数字控制的加工设施组成,能够适应加工对象的改造。
它通过传输系统连接到一些设备,包括工业机器人、数控机床、传输链、三维轴承、RFID等。
该系统通过工业机器人将工件发送到各种加工设备,使工件加工准确、快速、自动。
工业机器人作为FMS系统的重要组成部分,是将传统制造业升级为智能制造业的不可替代的重要设备。
机床装卸机器人代替工作,与数控机床合作实现零件装卸、清洁、抛光、工件包络等加工过程中的工作,大大节约了人工成本,有效降低了生产过程中对人类安全的隐患,提高了生产效率。
随着工艺效率的不断提高,越来越多的制造商将工业机器人引入实际生产。
本文在此基础上研究了工业机器人自动装卸工作台仿真系统的设计,以供参考。
关键词:工业机器人;自动上下料工作站;仿真系统设计引言工业自动化生产中,随着工资生产成本的不断增加,工业机器人承担着越来越重要的任务。
工业机器人主要用于需要重复、重、复杂运动的情况下的自动生产,例如b .装配、装卸、处理等。
就在需要极大灵活性和高速的情况下,工业机器人技术正在得到广泛应用。
1工作站系统工业机器人的自动装卸工作台由工业机器人、数控机床、导轨、输送链、开关柜等设备组成。
工作站需要工业机器人取料输送链提供的坯件,自动装卸四台数控机床。
成品通过送料带运送,毛坯和成品按照4×4图案堆放。
在工作站运行期间,无需进行实时手动输入和填充。
2机器人的数控机床自动上下料应用的价值分析在信息技术与工业化技术不断融合的背景下,智能制造业的发展速度越来越快。
以机器人为核心和代表的智能产业发展非常迅速,甚至成为衡量一个国家现代化程度的重要标准。
据我们所知,发达国家工业机器人的自动化生产已进入流水线状态,甚至成为自动化设备的主要发展方向。
基于Robotstudio机器人上下料工作站设计

毕业设计说明书(论文)设计(论文)题目: 基于Robotstudio机器人上下料工作站设计专业: 工业机器人技术班级: 机器人19-1 学号: 19411014姓名: 桂顺指导教师: 周天奇2020 年 6月 14日目录第一章绪论 (1)1.1 选题的背景与意义 (1)1.2 国内外工业机器人机发展趋势 (2)第二章机器人上下料工作站的仿真设计 (3)2.1工业机器人仿真系统的创建 (3)2.1.1准备工作 (3)2,2工业机器人系统的布局 (5)2.3动态输送链的创建 (10)2.4创建动态夹具 (18)2.4.1设定夹具属性的步骤 (18)2.4.2设定检测传感器 (19)2.4.3设定拾取放置动作 (21)2.4.4创建属性与连结 (22)2.4.5创建信号与连接 (23)2.4.6仿真验证 (23)第三章:物料检测smart组件创建 (26)3.1新建一个smart组件 (26)3.2:工作逻辑的设定 (29)3.2.1:配置IO单元 (29)3.2.2:配置IO信号 (29)3.3上下料工作站的仿真运行 (30)3.4总结 (37)致谢 (38)参考文献 (39)附录 (41)摘要从实现自动化生产过程中的某下料系统需求出发,讨论机器人的选型,和控制柜的选择,以及夹具的设计,物料块的大小种类以及质量等,思考建立工作站的布局、系统的创建运动轨迹、路径规划、运动仿真等内容。
本文基于RobotStudio 离线编程软件虚拟仿真自动下料系统:由输送链将物料运输到输送链末端,有传感器检测信号后,机器人将会到指定位置去夹持并物料放入机床进行加工,此时输送链会自动补齐一个物料块并输送到输送链的末端,当物料块加工完成后再由搬运机器人放置在选定位置,这一系列的自动化搬运和码垛等工作,只需一台机器人和一个输送链来完成,通过机器人与外围设备之间的信号连接,实现自动化运行。
关键词robotstudio;上下料;外围设备;信号连接第一章绪论1.1选题的背景与意义随着现代科学技术的迅猛发展,机器人技术已广泛应用于人类社会的各个领域,其中诞生的工业机器人是应用于实际生产并实现工业自动化生产的一个重要体现工业机器人作为现代工业的三大支柱之一,广泛应用于食品、化工、医药包装等行业。
基于工业机器人的上下料装配系统-张生
常州机电职业技术学院毕业设计(论文)作者:张生学号: 41240105系部:电气工程系专业:电气自动化技术(工业机器人应用) 题目:基于工业机器人的上下料装配系统校内指导教师:汪励企业指导教师:冯显俊评阅者:2015年4 月毕业设计(论文)中文摘要I目录1 绪论 (1)1.1 工业机器人发展现状及趋势 (1)1.2 项目研究原因 (2)1.3 项目主要任务 (2)1.4 项目研究意义 (3)1.5 工业机器人与数控机床CNC (3)2 上下料装配系统总体方案 (4)2.1 上下料装配系统工作任务 (4)2.2 上下料装配系统工作流程图 (5)2.3 上下料装配工作站系统配置 (6)3 工业机器人选型 (7)3.1 工业机器人系统组成 (7)3.2 机器人控制柜DX100 (7)3.3 机器人本体(MOTOMAN-MH6) (9)3.4 机器人末端执行器 (11)4上下料装配工作站外围设备 (15)4.1 数控机床CNC (15)4.2 可编程逻辑控制器PLC (16)4.3上下料装配工作站的其他外围设备 (19)5 上下料装配工作站硬件系统设计 (22)5.1 工作站主电路系统设计 (22)5.2 控制柜及其设备配置 (22)5.3 机器人工作站I/O表 (25)5.4 外围设备与PLC的连接 (26)5.5 机器人与PLC的连接 (30)5.6 数控机床与PLC的连接 (31)5.7 机器人MXT以及电磁阀的连接 (32)6 上下料装配工作站软件系统设计 (33)6.1 上下料装配工作站PLC程序设计 (33)6.2 上下料装配工作站机器人程序设计 (49)结论 (57)致谢 (58)参考文献 (59)附录1 DX100通用用途I/O信号定义、接线图 (60)附录2 上下料工作站气动原理图 (64)II1 绪论1.1 工业机器人发展现状及趋势从世界各国工业机器人发展过程中,可归纳成三种不同的工业机器人发展模式,即日本模式、欧洲模式和美国模式:(1)日本模式日本模式的特点是:各司其职,分层面化完成对企业的交钥匙工程。
基于工业机器人的全自动上下料系统设计与应用
基于工业机器人的全自动上下料系统设计与应用
王晓东;杨娇;付强;徐国新
【期刊名称】《辽宁科技学院学报》
【年(卷),期】2022(24)3
【摘要】文章设计了基于工业机器人的全自动上下料系统。
该自动化系统摒弃人工上下料操作模式,以FANUC工业机器人代替人工操作,实现了压缩机工件自动上下料的操作,提高了总装生产线的生产效率,经济效益显著提升。
【总页数】3页(P22-24)
【作者】王晓东;杨娇;付强;徐国新
【作者单位】辽宁科技学院工程训练中心
【正文语种】中文
【中图分类】TP241
【相关文献】
1.基于安川工业机器人自动上下料工作站系统设计
2.基于PLC与工业机器人的全自动化码垛系统设计
3.基于工业机器人的机床上下料工装设计与应用
4.基于PLC 的工业机器人自动上下料控制系统设计
5.工业机器人自动上下料工作站仿真系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
冀 麓 譬式 ~I:、 机器人 』:下料 l 作站 南机器 人
系 统 、PLC 控 制 系 统 、CNC 数控 机 床 、 f 下料 输送线 系统 、操作 按钮盒组 成 , 整 体 置 如 图 1所 _,J;,婴求 :
设 备上 电前 ,系 统 处 于 始状 态 , 即 输 送 线 卜无 托 盘 、机 器 人 于.爪 松 开 、 数 控 机 床 盘 兀 f:件 ,没 备 就 绪 后 , 按 启 动 按 钮 ,系统 运 行 ,绿 色 指 示 灯 亮 , 卜料机将载 有待加 I 件 的托 盘放置在 输 送 线 的 起 始 位 置 ,托 盘 检 测 光 电 传 感 器检测 到托舷 ,启 动直流 电机 和伺服 电
l N TE L LG E N T R O B O T 、
《智能机器人 》February.201 8 L
重庆 科创 职 业 学 院 谢 祥
摘 要 :本文 介绍安 川工 业机 器人 自动上 下料 的设 计 思路 和控 制原理 ,合 理利 用安川 工业机 器人 、欧姆 龙 PLC在数 控车床 自动上料 中的应用方案设计 ,以及硬件的选择 和程序的编写 ,该 系统具有操作 简单 、安全 、 稳定的特点 ,在数控 车床机械加 工行业 中节约人工 ,减 少工人 的工作 劳动 力,保证 生产的顺利进行。 关键词 :机 器人 ;数控机床 ;PLC
袭 l稠懑 A-与 聒翱嚣 姆 睦凰融鬟 . ~
机 器 人 【 IXlOO
NJ PLC地 l1L
插 头
CN 308
CN308 CN306 CN307
信 号 地址
定 义 的 内容
Bl
机 器人 程 序 启 动 Chl Out00
IN
A2
机 器人清 除报警和故 Ch1
盘 夹 紧 ,CNC进 仃 加 l 处 理 ,CNC JJf1 I 完 成 后 CNC安 令 门打 开 ,通 知 机 器 人 把 j 件 搬 运 刽 f 料 化 笱 的 托 盘 上 , 搬 运 完 成 , 卜料 化 的阻 挡 电 磁 铁得 电 , 挡铁缩 ,伺服 l乜机启动 , r件 卜下料 输 送 线 2和 J- _f l: 卜料 输 送 线 3运 仃 , 将 装 有 1 件 的 托 盛 阳 装 配 I 作 站 输 送 。
4已 :
随 着 中 劳 动 力成 小 的 小 断 捉 高 , 在 数 控 车 床 机 械 加 I " 、I ,用 机 器 人 来 代 替人 _r进 行数控机 J术 I 下料实 现尤人 F1动 化 生 产 已 是 大 势 所 趋 。 业 机 器 人
其 自动化 程度高 ,呵代 替人 I 作业 诸 多 优 点 ,在 机 械 加 业 广1动 化 生 产 越 来 越 得 到 广 泛 的 心 。 1 、 机 器 人 与 数控 机床 的结 合 ,有效提 高 J,数控机 床 的 利 用 率 和 加 I 稳 定 性 ,使 无 人 自动 化 牛 产 得 以实 现 。
. Out01
障
B8
机 器 人运 行 中 Ch2 ln08
oUT
A8
机 器 人伺 服 已接 通 Ch2 In09
A9
机 器 人报 警错 误 Ch2 ln1O
BlO
机器人 电池报 警 Ch2 lnl1
oUT Al0 机 l器 人选 择 远程 模 式 Ch2 Inl2
图 1机 器 人 自动 上 下料 工作 站
ቤተ መጻሕፍቲ ባይዱ
机 , J:下 料 输 送 线 同 时 运 仃 ,将 托 蕊 T 件 l 料 佗 置 处 输 送 , 当托 盘 达 到 f 料 位 娥 时 ,被 电 磁 铁 挡 住 , j、r托 盘 榆测 光电传感 器愉测 到托鼎 ,1f1=流也机 与伺服 电机 停 I卜,CNC安伞门打 ,机 器 人 将 托 盘 的 I 什 搬 运 到 CNC 』JlI l 台 搬 运 完 成 后 ,CNC 安 全 f J火 闭 、
图 2工 作 流 程 图
3机 器 人 自动 上 下料 硬件 设计 3.1系统 框 图
机器人 } 下料 作站 以 NJ PLC为控制核心 ,现场设备启 动、复位按 钮 、传感 器 、继 电器 、电磁 阀为 NJ PLC的输入 / 输 出设 备 ;CNC系统 与 NJ PLC之 间通过接 点传送 信 息 ;机 器 人与 NJ PLC之 问通过机 器人接 口传送 信息 ;NJ PLC通过 EtherCAT总线控制伺 服系统运行 。系统框 图如 图 3所示 。
图 3机 器人 上 下 料 系统 框 图
3.2接 口配置 3.2.1机 器 人 Ij NJ PLC接 口配置 CN308是 机 器 人 的 专用 1/O 接 ¨ ,每 个接 口 的 功 能 是 同
定的 ,如 CN308的 B1输入接 口功能为 “机器人程序启动”,
当 Bl口为高 电平时 ,机器人启动运行 ,开始执 行机 器人程序 。 CN306是 机 器 人 的 通 用 I/O接 r1,每个 接 n的功 能 由 用 户 定 义 , 如将 CN306的 B1输入接 rJ(IN9)定 义为 “机器人搬运开始 ”, 当 B1口为高电平时 ,机器人开始搬运 件 。CN307是机器人 的通 用 I/O接 口,每 个接 ¨的功 能 由用 户定 义 ,如将 CN307 的 B8、A8输 出接 口 (OUT17)定 义为机器人手爪夹 紧功能 , 当机器人程序使 OUTI7输 为 I时 ,Yv1得电 ,吸紧 l 件 , 机 器人 控制 器 DX100 NJ PLC 的 I/0 接 【==_I配 置 见表 1。
39 l智能机器人
i 伺服控制与应用
Servo control and Application
J占J:安 JIl I)ll,.t,ll,器 八 rl功 I:l 料 l 作 站 系统 没
F料 I-fF站 的 I 作流 程 如 冈 2所 爪 。
机器人把 工件搬 运至时乇盘 t
阻 挡电磁 铁得 电缩 回、启 动伺服 电机