REX521H51G-PT断线矩阵设置
RET521 v2.3操作手册
[整理]REX521技术参考手册.
![[整理]REX521技术参考手册.](https://img.taocdn.com/s3/m/a7848f756bd97f192279e9f9.png)
REX 521型微机保护继电器技术参考手册汇编上海ABB工程有限公司2002,08,181. 概述REX521建立在RED500平台上,是REF54_型馈线终端的一种简化产品。
它是综合保护、控制、测量、监视和通信为一体的微机终端。
本手册阐述REX521终端的概貌、及其配置。
首先是概述,第二部分逐项描述了基本配置和中级配置等两种的标准配置的概况,第三部分到第六部分介绍了信号路径及其功能,第七部分为应用举例。
最后是附录,为原版Copy的技术数据和外部结线图,以供查阅防止误导。
REX 521 和RED 500 平台在功能模块介绍上的不同在CD-ROM“功能的技术介绍” (1MRS 750889-MUM)的功能模块的介绍方面, REX521 和RED 500 平台在某些方面有所不同。
首先,某些术语是指其他产品而不是REX521,其次,有某些数据仅适用于REX521:• 在试验某一功能模块时,READY 指示灯闪烁。
• 事件标识位1仅适用于SPA 通讯。
• 不能实现直接控制自动重合闸的功能。
REX521输入、输出量一览表:REX521的输出继电器接点能力REX521 机箱安装尺寸:请参阅下图中的标准19英寸的1/3 (表中第二项)。
REX521的整定范围一览表:REX521的通信串口:面前一个背后两个,全是光纤通信口。
背后串口的通信规约LON/IEC/SPA 可选。
表1.-1 REX 521的两种标准配置表1.-2 REX521的保护功能表1.-3 REX521的控制功能表 1.-4 REX521的测量功能表 1.-5 REX 521的状态监测功能表 1.-6 REX 521电源质量监视功能基本配置和中级配置的主要区别在于,中级配置增加了方向接地保护。
B01和B02以及M01和 M02之间的区别是,B02 和M02增加了自动重合闸功能。
2. 信号路径总图表示除模拟量信号外的输入、输出的功能控制的耒龙去脉的信号路径图图:2.-1 信号路径总图概念2.1. 数字量输入为了实现不同的功能,数字量输入(DI1...DI9) 要连接到功能模块的输入口,或直接连接到输出回路。
RC521-FE、RC522-FE(REV.D)用户使用手册200702

RC521/2-FE(D) 用户使用手册
200702
瑞斯康达科技发展股份有限公司为客户提供全方位的技术支持和服务。 直接向瑞斯康达科技发展股份有限公司购买产品的用户,可与瑞斯康达科技发展股份有限公司各地办事 处或用户服务中心联系,也可直接与公司总部联系。 读者如有任何关于产品的问题,或者有意进一步了解公司相关产品,可采用下列方式与我们联系: 公司网址: 8610-82883110(7×24 小时)
接地警示信息:为了保证设备的安全与运行稳定性,在使用本设备时必须提供良好 的接地保护。如果电源的接地系统不完善,请务必用接地线将本设备的接地螺钉和安全接 地系统连接。接地线的线径要求是至少大于或等于 AWG16(1.5mm2) 。
请勿擅自拆卸设备,否则将可能造成不可恢复的损坏,瑞斯康达科技发展股份 有限公司将视擅自拆卸设备为自动放弃保修权利。
声
明
Copyright ©2007 瑞斯康达科技发展股份有限公司 版权所有,保留一切权利。 非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本书内容的部分或全部,并不得以任何形式 传播。 是瑞斯康达科技发展股份有限公司的注册商标。 对于本手册中出现的其它商标,由各自的所有人拥有。 这里的产品和服务名称都为瑞斯康达科技发展股份有限公司的商标。 由于产品版本升级或其它原因,本手册内容会不定期进行更新。除非另有约定,本手册仅作为使用指导, 本手册中的所有陈述、信息和建议不构成任何明示或暗示的担保。
1.2 功能特性
1、 RC521-FE(D)台式设备,用户端使用 2、 RC522-FE(D)模块式设备,放置于采用双电源容错的局端十六槽机箱使用,热插拔模块,高可靠性。 3、 RC522-FE(D)有 Master 和 Slave 两种工作方式,局端设备为 Master,远端设备为 Slave,可以通过拨码设 置改变,内置远端管理模块。 4、 能传输 10M 或 100M 速率的以太网业务。可选配不同距离、不同波长的业务模块以满足不同的要求 5、 丰富的工作状态指示灯,方便、准确地了解设备接口、链路的工作状态 6、 RC522-FE(D)在网管软件的支持下可以对电口速率进行 N*64kb/s 配置 7、 支持可选择的光路、以太网电口中断转移功能,可将中断告警传递给对端设备 8、 光口默认类型 DSC 接口,可根据需要定制 FC 等接口类型 9、 光口支持 100Base-FX 光纤传输标准,可与其它产品互通 10、以太网电口 10/100Mbps 自适应,全双工/半双工自适应 11、支持直连线,交叉线自适应功能 12、支持超常帧传输,最大 2046 字节透传 13、 RC521-FE (D) 紧凑小机箱结构, 内置交流 220V 电源, 放置于客户端, 物理尺寸 120mm×39mm×155mm(宽 X 高 X 深) 14、RC522-FE(D)亦可配合内置电源的一槽、四槽机箱使用,配置灵活,物理尺寸 91mmX25mmX152mm 15、工作温度 0~45℃ 16、设备功耗<5W 产品结构 1、 电源由 16 槽(4 槽)机箱背板或单槽机箱供电,电源电压为+5V5%;消耗电流小于 0.6A。 2、结构尺寸与现有收发器板卡尺寸相同。
REX521操作说明书

3.说明 ................................................................................................... 11 3.1.HMI 的特点 ................................................................................................ 11 3.1.1.按钮功能 .......................................................................................... 13 3.1.2.更改语言 .......................................................................................... 14 3.1.2.1.使用按钮组合更改语言 ................................................................ 14 3.1.3.密码 ................................................................................................. 15 3.1.4.显示背光 .......................................................................................... 15 3.1.5.显示器对比度 .................................................................................. 15 3.1.6.显示器测试 ...................................................................................... 16 3.1.7.选择一次侧值 .................................................................................. 16 3.1.8.带光隔离的串行通讯端口 ................................................................ 16 3.2.菜单 ........................................................................................................... 16 3.2.1.测量菜单 .......................................................................................... 18 3.2.2.事件菜单 .......................................................................................... 19 3.2.3.手动控制 .......................................................................................... 19 3.2.3.1.就地 / 远方位置选择 ..................................................................... 19 3.2.3.2.控制断路器 ................................................................................... 20 3.2.4.整定参数 .......................................................................................... 21 3.2.5.整定掩码 .......................................................................................... 22 3.3.指示信息 .................................................................................................... 22 3.3.1.保护指示 .......................................................................................... 23 3.3.2.自检 ................................................................................................. 23
PT断线处理

绝6 缘(多用于高压产品)。
6
PT的基本原理及断线处理
(5)普通结构(单级式)和串级结构两种。3~35kV电
压等级都制成普通结构,110kV及以上电压等级的电压
互感器才制成串级结构。在我国,电压大于330kV只生
产电容式。
随着电压等级的升高,电压互感器一次绕组的绝缘
需随之增强。尤其在110kV及以上电压等级的单相三绕
机如长期在这一状态下运行会烧毁, 为此要在系统
电压降低时及时把Biblioteka 源切除,电压继电器YJ就是为了实出这一要求而设置的。电压继电器由一电磁铁
和一对常闭接点组成。它的线圈接在电压互感器的
次级,接点串在断路器脱扣器线圈回路中。在正常
情况下,(系统电压正常时)电磁铁是吸合的。此
4
4
PT的基本原理及断线处理
为了减少测量仪表和继电器的规格品种,使之
生产标准化。电压互感器二次侧的额定电压规定为
100V(线电压)或100/ V(相电压)。电流互感器
二次侧额定电流则规定为5A或1A(后者是弱电化时使
用的)因此系统的额定电压越高或额定电流越大时,
所用由的述互所感举器的变使比用就互越感大器。的一些例子可以看出,互感
器的一次线圈是和电力系统相连的,因而在运行中是
回路标准的低电压和小电流,使测量仪表和保 护装置标准化,小型化,并使其结构轻巧,价 格便宜,便于屏内安装。 1.2.使二次设备与高压部分隔离,其互感器二 次侧均接地,从而保证了设备和人身的安全。
2
PT的基本原理及断线处理
2.电压互感器的基本原理
2.1电压互感器实际上是一个带铁心的变压器。它主要
由一、二次线圈、铁心和绝缘组成。当在一次绕组上施
iVEX使用说明
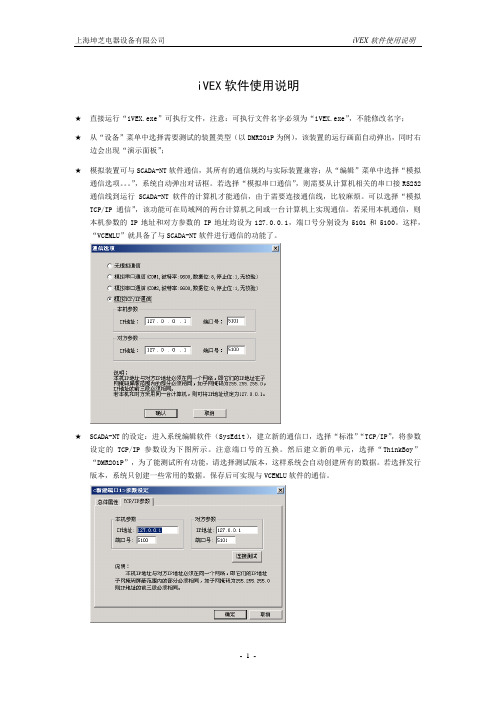
iVEX软件使用说明★直接运行“iVEX.exe”可执行文件,注意:可执行文件名字必须为“iVEX.exe”,不能修改名字;★从“设备”菜单中选择需要测试的装置类型(以DMR201P为例),该装置的运行画面自动弹出,同时右边会出现“演示面板”;★模拟装置可与SCADA-NT软件通信,其所有的通信规约与实际装置兼容;从“编辑”菜单中选择“模拟通信选项。
”,系统自动弹出对话框。
若选择“模拟串口通信”,则需要从计算机相关的串口接RS232通信线到运行SCADA-NT软件的计算机才能通信,由于需要连接通信线,比较麻烦。
可以选择“模拟TCP/IP通信”,该功能可在局域网的两台计算机之间或一台计算机上实现通信。
若采用本机通信,则本机参数的IP地址和对方参数的IP地址均设为127.0.0.1,端口号分别设为5101和5100。
这样,“VCEMLU”就具备了与SCADA-NT软件进行通信的功能了。
★SCADA-NT的设定:进入系统编辑软件(SysEdit),建立新的通信口,选择“标准”“TCP/IP”,将参数设定的TCP/IP参数设为下图所示。
注意端口号的互换。
然后建立新的单元,选择“ThinkBoy”“DMR201P”,为了能测试所有功能,请选择测试版本,这样系统会自动创建所有的数据。
若选择发行版本,系统只创建一些常用的数据。
保存后可实现与VCEMLU软件的通信。
★演示面板的使用:上部是装置的出口继电器KH1~KH6;左边是交流电流电压输入,可设幅值和相位,输入分“正常状态”和“故障状态”两种,并且可以相互切换,以测试保护,正常状态和故障状态的实际输入幅值和相位可分别通过“正常状态设定”和“故障状态设定”进行设置,以模拟不同的故障类型,其中在“故障状态设定”的对话框中可设定故障过渡时间,由正常状态切换到故障状态时,数据会从正常状态等比例连续变化到故障状态,由故障状态切换到正常状态时,数据立即变化到正常状态;右边是所有开关量输入(其中IN01直接从模拟断路器接入),其它的控制输入量包括控制电源失电、合闸回路断线、跳闸回路断线、CT断线、PT断线,以模拟各种告警状态;演示面板内置一个模拟断路器,其中的“○”“┃”分别表示外部控制断路器的分闸和合闸。
雷卡断线测试操作手册

雷卡断线操作手册一、雷卡工作原理图:由上图可知,断线方式测试时,雷卡的A- BIS口接于基站的传输位置,而RF接于基站的天线口,雷卡仪表既是发射端又是接收端,组成一个回路,进行测试。
雷卡端的接线界面:(图3.1)基站端接线界面:(图3.2)二、雷卡的参数设置:1.开启雷卡,进入设置界面,设置BTS Information(BTS信息)参数(图3.3)2.设置雷卡BTS信息-1设置待测BTS的频率(900或1800)设置待测BTS设备厂家设置待测BTS设备类型设置BTS版本设置A-BIS(默认)进入TRU设置界面(图3.4)3.设置雷卡BTS信息-2设置INTERFACE(接口)为ABIS UNBAL设置RF单双工设置保存BTS测试报告模式(FULL)(图3.5)4.设置MAPPING TABLE(即设置BTS载波及地址)设置相应的TEI地址(见图3.6)选择对应的TRU数量(见图3.7)设置对应的TRU排列(见图3.8)(图3.6)(图3.7)(图3.8)5.Configure BTS设置及文件保存(图3.9)(图3.10)按此键,进入Configure BTS 测试(图3.11)(图3.12)三、雷卡测试项目:1、发射机测试(Transmitter Test)这项包括有发射功率、频偏、相偏、功率包络、调制频谱这几项的测试步骤:A . 进入发射测试菜单(见图4.1)B . 选中Transmitter Test功能测试项(见图4.1)C . 调出参数设置界面(见图4.1)D . 修改测试参数(Channel Number、Timeslot、Expected Power Lever)(见图4.2/4.3)E . 测试运行(见图4.2)发射测试菜单界面:(图4.1)测试需要修改的项:1.Channel Number(也就是我们通常所说的频率,分为低频、中频、高频,比如,18是低频,45是中频,90是高频)。
rex521保护使用说明书

用户指南
特性
REX 521 馈 线 和 电 动 机 保 护 继 电 器
1YZA000013
发布:2001.11.20 版本:G/2006. 03. 15 本公司保留数据修改权利·恕不另行通知
基本版 B01: ● 三段过流保护 ● 三段零序过流(接地)保护 ● 缺相保护 ● 热过负荷保护 ● 涌流制动 ● 电流输入回路监视 ● 电流波形畸变测量 ● 电流测量 ● 零序电流测量 ● 断路器累积电气磨损计算 ● 故障录波 ● 跳闸回路监视 ● 断路器失灵保护 ● 断路器状态监视及控制 ● 输出自保持 ● 状态监视 ● 就地 / 远方切换选择 ● 用户自定义输入 / 输出 ● 电气联锁 ● 用户自定义告警灯
感器通道采用相电压的接入方式。
高级版 H09: ● 三段过流保护 ● 三段零序电流(接地)保护 ● 两段过电压保护 ● 两段低电压保护 ● 三段零序电压保护 ● 涌流制动 ● 两段低周或过频保护 ● 电流输入回路监视 ● 电压输入回路监视 ● 电流波形畸变测量 ● 电压波形畸变测量 ● 电流测量 ● 自动重合闸(1-5 次重合) ● 零序电流测量 ● 电压测量 ● 零序电压测量 ● 频率测量 ● 三相功率和电能测量 ● 断路器累积电气磨损计算 ● 故障录波 ● 跳闸回路监视 ● 断路器失灵保护 ● 断路器状态监视及控制 ● 自保持输出 ● 状态监视 ● 就地 / 远方切换选择 ● 用户自定义输入 / 输出 ● 电气联锁 ● 用户自定义告警灯 注意:高级版 H09 提供 CT 和 PT 通道,采用相
特性(续)
REX 521 馈 线 和 电 动 机 保 护 继 电 器
● 就地 / 远方切换选择 ● 用户自定义输入 / 输出 ● 电气联锁 ● 用户自定义告警灯
罗克韦尔 ControlLogix 系统 说明书

准备事宜 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 1756-L7x 控制器部件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
未随 1756-L6x 控制器提供的部件. . . . . . . . . . . . . . . . . . . . . . 33 1756-L6x 控制器安装. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 CF 卡的安装和取出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 电池的连接与更换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 将控制器插入机架 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 将控制器从机架拆下 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
安装 1756-L7x 控制器 安装 1756-L6x 控制器
控制器使用入门
高清无缝混合矩阵说明书

安全注意事项注意:手册中所列为出版之前时的信息,制造商保留更改和改进其产品的权利,所有参数如有更改,恕不通知安装场所为了确保设备使用安全并且获得满意的性能,在安装设备时,需要考虑下述情况:1.远离高温的热源和环境。
2.避免阳光直接照射。
3.为了确保设备的正常散热,应避开通风不良的场所切勿堵塞设备的通风口。
此款设备上盖和两侧有通风口,在安装时,其后部两侧应距离其他设备或墙壁5CM以上以利于散热。
4.本设备应水平安装。
5.避免安装后会剧烈震动的场所。
6.避免在过冷、过热的场所间相互搬动机器,以免设备内部产生结露,影响机器的使用寿命。
7.切忌勿用湿手触摸电源和机器。
8.勿将液体溅落在设备上,以免造成设备内部短路或失火。
9.勿将其它设备直接放置于本机上部。
10.在工程安装时请连接好地线,以免造成雷击主芯片损坏。
11.设备有故障时,为了避免损坏,请勿自行拆开机壳,必须委托有资格的专业维修人员在指定的维修单位进行维修。
12.为了防止电击和失火,请勿将本机器放置到雨淋或潮湿的场所。
在使用前请阅读和研究此手册中的所有指示和注意事项!此手册和原有销售单据保留,以便将来必要的维修时之用。
拆开包装后,检查是否遗失或损坏如果发现任何遗失或损坏,请不要安装或操作此产品,应尽快同代理商联系。
目录第一章概述 (3)1.1 产品设备 (3)1.2性能特点 (4)1.3规格参数 (5)1.3.1机箱参数 (5)1.3.2视频输入信号参数 (5)1.3.3模拟音频输入参数: (7)1.3.4视频输出技术参数: (7)1.3.5模拟音频输出参数: (9)1.3.6功耗 (9)第二章硬件说明 (10)2.1面板示意图 (10)2.1.1 DH-BC2000-16前面板 (10)2.1.2 HD2000-16后面板 (11)2.2混合输入卡 (11)2.3 SDI输入卡 (12)2.4 HDBaseT输入卡 (12)2.5 光纤输入卡 (12)2.6 混合输出卡 (13)2.7 HDBaseT输出卡 (13)2.8 光纤输出卡 (13)2.9 通讯卡 (13)第三章面板操作 (14)3.1 触屏面板说明 (15)3.2 矩阵切换 (15)3.3 设备信息 (16)3.4 改变输出分辨率 (16)第四章软件操作 (18)4.1软件安装 (18)4.2软件使用 (19)4.3切换矩阵 (19)4.4查询矩阵状态 (20)4.5场景操作 (20)4.6循切操作 (21)4.7串口设置 (21)4.8网络控制设置 (22)第五章控制协议 (24)第一章概述传统视频矩阵在在切换过程中会产生闪烁、黑场、抖动、延时和信号中断等缺点。
REX521技术参考手册

REX 521型微机保护继电器技术参考手册汇编上海ABB工程有限公司2002,08,181. 概述REX521建立在RED500平台上,是REF54_型馈线终端的一种简化产品。
它是综合保护、控制、测量、监视和通信为一体的微机终端。
本手册阐述REX521终端的概貌、及其配置。
首先是概述,第二部分逐项描述了基本配置和中级配置等两种的标准配置的概况,第三部分到第六部分介绍了信号路径及其功能,第七部分为应用举例。
最后是附录,为原版Copy的技术数据和外部结线图,以供查阅防止误导。
REX 521 和RED 500 平台在功能模块介绍上的不同在CD-ROM“功能的技术介绍” (1MRS 750889-MUM)的功能模块的介绍方面, REX521 和RED 500 平台在某些方面有所不同。
首先,某些术语是指其他产品而不是REX521,其次,有某些数据仅适用于REX521:• 在试验某一功能模块时,READY 指示灯闪烁。
• 事件标识位1仅适用于SPA 通讯。
• 不能实现直接控制自动重合闸的功能。
REX521输入、输出量一览表:REX521的输出继电器接点能力REX521 机箱安装尺寸:请参阅下图中的标准19英寸的1/3 (表中第二项)。
REX521的整定范围一览表:REX521的通信串口:面前一个背后两个,全是光纤通信口。
背后串口的通信规约LON/IEC/SPA 可选。
表1.-1 REX 521的两种标准配置表1.-2 REX521的保护功能表1.-3 REX521的控制功能表 1.-4 REX521的测量功能表 1.-5 REX 521的状态监测功能表 1.-6 REX 521电源质量监视功能基本配置和中级配置的主要区别在于,中级配置增加了方向接地保护。
B01和B02以及M01和 M02之间的区别是,B02 和M02增加了自动重合闸功能。
2. 信号路径总图表示除模拟量信号外的输入、输出的功能控制的耒龙去脉的信号路径图图:2.-1 信号路径总图概念2.1. 数字量输入为了实现不同的功能,数字量输入(DI1...DI9) 要连接到功能模块的输入口,或直接连接到输出回路。
夏米尔操作指南4
夏米尔操作指南4夏米尔ROBOFIL-XXX型操作指南状态信号行:GEO 路径转换激活时(MIR-ROT-INV)不亮,无功能激活时橙色 ALV 电极丝垂直校准时绿色ALP 电极丝工件校准时绿色GEN 脉冲电源接通时橙色CTC 电极丝短路时绿色ALM 数控在报警时红色UrG 紧急停止按钮按下时红色EXE 执行程序时黄色WIR 启动走丝时黄色显示当前使用的检查方式和时间MDI 键盘输入MEM 存储器JOG 手动Ready 准备就绪Start 执行Hold 中断用户参数SCF 缩放系数度 1 ROT 旋转角 0 MirX 对X轴镜像 0 MirY 对Y轴镜像 0 InvXY XY轴交换 0 TFE 考虑偏移 1 TER 考虑斜度角 1 ATH 自动重穿线ART 自动重启动SIM 空运行MLK 无移动模拟(程序校验)BLK 单段执行BLD 跳段有效,表示程序前有/的就不执行(如/M00) OSP 考虑可选停止制作:尹承效夏米尔ROBOFIL-XXX型操作指南BLK 打勾后,ISO程序单段执行OSP M01无效打勾后,M01有效(M01为暂停)BLD /开头的语句执行打勾后,/开头的语句跳过0、自动穿丝无效即断丝后不会自动穿丝ATH 1、断丝后回起割点自动穿丝再空走到断丝点切2、如果穿丝穿不进就直接加工下一个孔VSIM 空运行速度(6-900)1、机床坐标操做指令:SMA,X10 设制X轴机床坐标值为本10.00 SMA 设定机床坐标值X Y U V 同时为零MOV,X10 机床坐标系中的绝对移动将机床坐标X移到10处(注意无插补,各轴速度一样,路徑不是线性的) MOV XYUV都回零MOV,Z10 Z轴机床坐标移到10处绝对 Z轴不能同其他轴联动移动MVR 机床坐标的相对移动MVR,Z10 Z轴在现在的位置上向上移动10mm(不考虑转换、镜像、缩放,如果数控系统先前为绝对方式,移动后重新回到这一方式)制作:尹承效夏米尔ROBOFIL-XXX型操作指南CTR,X20 在此位置X轴向正方向加工20mm EDG,X-,X0.1252、工件坐标操作指令:SPA,X1 更新坐标SPA 同时更新XY的坐标为零MPA 绝对移动(不带值XY同时移动到零处) MPR 相对移动CPA 绝对加工CPR 相对加工3、预定义的移动GOH,Hh 按照工件高度H移动Z轴以定位喷嘴位 SEP,CPp 存储绝对坐标系中当前点的坐标p=点号,从0-5 GOP,p 移动到所定义的点位上,p=点号,从0-54、工艺和加工规准TEC<,表名> 激活含有准备使用的规准的工艺 WIR<,表名>激活准备使用的电极丝特性表HPA,h 修改当前高度h=新高度单位mm REX,Ee,(Hh)在所用工艺表中选择工艺规准Ee可选修改当高度(Hh) CLE(,c) 引入附加间隙(c=附加间隙,mm) CLE 设定附加间隙为零制作:尹承效夏米尔ROBOFIL-XXX型操作指南5、辅助功能AUX,m 辅助M功能(m=功能号)WTC 电极丝准备和切(拉)断WPR 断丝后的穿丝准备THR 自动穿丝(在WCT或WPR或人工丝准备之后) MDI模式常用指令:CT 相应的G\M代码SMA,XO,YO G74X0Y0 设定机床坐标的0,0点 SPA,XO,Y0 G92X0Y0 设定工件坐标的0,0点 MOV,X0,Y0 G75X0Y0 移动到机床坐标的0,0点 MVR,X2.0 X 方向相对移动2mm THD M60 穿丝WCT M50 剪丝SEP,CP1 G910 A1 设定当前点为1号点 GOP,1 G911 A1 从当前点移动到1号点EDG,Y,Y-0.125 Y方向对边,并把所对面设0CEN,R45 45度找孔中心 MID,R90 90度方向找中 CTR,X10 X方向相对切割10mm简单加工举例:TEC,LT25AREX,E2,H25制作:尹承效夏米尔ROBOFIL-XXX型操作指南CTR,X10程序执行:ZCL 加工计数器设回到零 SIM,I 激活(i=1) 不激活(i=0) EDG,s轴(,轴v) 找边CEN(,Xx)(,Yy)(,Rr) 找孔中心MID(,Xx)(,Yy)(,Rr) 在两个平行面之间找中GG00 快速移动G01 直线插补G02 顺时针圆弧插补G03 逆时针圆弧插补G04 暂停G09 准备停止一次移动到位 G10 指定偏移量/可选责程序跳步值 G11 自动加工顺序G17 编辑面选择G20 英制输入(英寸)G21 公制输入(mm)G22 存储行程极限功能ON(有效) G23 存储行程极限功能OFF G28 返回到第一参考点G29 从参考点返回到用户点 G30 返回到第二、第三、第四用户点 G32 存储当前点为用户第二、第三、第四参考点G33 设定用户点2,3,4G40 取消丝径补偿G41 电极丝左补偿G42 电极丝右补偿G46 最佳反向控制ONG47 最佳反向控制OFFG48 自动角部倒圆ONG49 自动角部倒圆OFFG50 取消斜度G51 左锥度G52 右锥度G53 在绝对坐标系中移动G61 恒定拐角半径制作:尹承效夏米尔ROBOFIL-XXX型操作指南G62 锥形拐角半径(最小) G63 锥形拐角半径(平均) G64 (最大) G65 宏调用(局部)G66 宏调用(全程)G67 取消宏调用(全程) G68 切割进给方式G69 准确停止方式G70 找边G71 找孔中心G72 找槽中心G73 电极丝校准和导向器设定循环 G74 设定测量点/机床坐标系设定 G75 在机床坐标系中定位 G76 定位-找边点类型1或2 G77 定位-测量点类型1、2或3 G78 定位-拐角点G79 计算工件倾斜角G86 取消支撑功能G87 “用支撑保留废芯”方式G88 “切除支撑”方式G90 绝对方式指令G91 相对G93 局部坐标系设定G94 恒速进给G95 伺服进给MM00 停止M01 可选停止(可用来建立支撑以保留废芯)M02 程序结束M06 穿丝水射流ON M07 上导电块退回ON M14 重穿丝块初始化 M15 锥度方式编成 M16 穿丝射水OFF M17 上导电块回退OFF M23 几何精度策略OFF M24 几何精度策略ON M27 保护策略OFF制作:尹承效夏米尔ROBOFIL-XXX型操作指南M28 一级粗加工策略ON M29 二级粗加工策略ON M30 程序结束和重绕 M31 预置计时器M32 检查水的离子度(电导率) M33 检查水的温度M34 工作液槽上水M35 放水M36 工作液槽位记忆+加载液位ON M37 加载液位OFF M40 空运行状态M42 走丝OFFM43 上、下冲液OFF M44 丝张力OFF M50 CUT 切丝M59 穿丝准备M60 穿丝M68 关闭循环泵M69 接通循环泵M70 轨迹返回功能M70 《执行有效》信号的管理 M71M73M74M80 加工状态M82 走丝开M83 下冲液开M87 存储功能1 ON M88 存储功能1 OFF M89 存储功能2 ON M90 存储功能2 OFF M91 遥控器报警有效 M92 遥控器报警无效 M93 遥控器报警接通ON M94 遥控器报警断开OFF M95 脉冲输出功能M96 完成加工M97 镜向反向加工M98 子程序调用M99 子程序结束制作:尹承效夏米尔ROBOFIL-XXX型操作指南穿丝射流水调整:EXE-service-calibration cyeles-wire calibration 激活卸下丝移动上加工头到相对于待加工工件所需的穿丝位置上接通穿丝射流水手动移动U/V轴以便使穿丝射流水对准下导向器的中心并在其周围分布均匀按memorize threading (记忆穿丝)ZUV 键,保存达到的位置存储UV位置;其值在穿丝操作中会自动用到。
科迪矩阵控制软件使用说明(支持网络及定时切换)(201012)

科迪矩阵控制软件使用说明第一章软件安装本软件为绿色软件,将该科迪矩阵控制软件目录复制到硬盘上即可。
复制完成后,运行RWMP286.exe。
默认的用户名为:aaa,密码:123第二章软件使用运行RWMP286.exe后,会出现如下界面:(以下图片仅供参考,软件版本以应用软件为准)A切换画面简介:上图中,每一个彩色圆饼处所处的交叉点位置对应一路信号的输入输出关系。
右方为输出信号(即矩阵的目的端口),上方为输入数(即矩阵的源信号端口)。
例如,上图表示输入1切换至输出1,输入2切换至输出2,......,输入16切换至输出16。
当鼠标在屏幕上移动时,对应的输入和输出路数颜色会变化,以示区别,上图中鼠标停留在输入16(in16)和输出14(out14)的位置上。
圆饼被分隔成几部分,就表示矩阵有多少层,上图中圆饼有红色、蓝色两部分,故有视频、音频两层;当只点亮其中一层时,就单独切换该层,若全部点亮,则为多层同时切换。
按钮:状态刷新按钮,点击该按钮,矩阵的所有状态将刷新一遍。
当矩阵规模较大时,刷新时间会较长(几秒至几十秒不等)。
按钮:通过点击该按钮,可以放大或缩小的大小和显示的圆饼个数。
按钮:在预置后,‘切换’为按照预置进行切换;‘取消’为取消预置键。
保存预置设置功能:。
按“增加”键,进行预置,单击鼠标左键,如上图所示,预置切换路数,按“Done”即可按照自己定义的“Name”一栏的名称进行保存。
调用时,单击下拉菜单中选择已经预置的内容,所预置的内容通过“编辑”可以进行修改,并保存。
显示与矩阵之间的通讯数据,供专业人士参考。
B快速使用入门:1、查询矩阵状态:1)单路查询:鼠标左键单击屏幕右侧的输出按键,圆饼的位置就是所对应的输入路数。
2)多路查询:鼠标左键单击状态刷新按钮,所有路的状态将刷新一遍。
2、切换路数:1)单路切换:鼠标左键双击输入、输出的交叉点位置,既将所对应的输入路切换到所对应的输出路。
鼠标左键单击输入、输出的交叉点位置,既将所对应的输入路预置到所对应的输出路,之后按‘切换’键,即实现切换。
浅谈变电所PT断线及备自投保护功能的应用

94一、选题背景39/149变电所是为动力厂锅炉装置、二套除盐水、除油除铁及厂前化工园区和生活区供电的6kV变电所。
该所始建于1991年11月,2005年通过改造,将继电保护装置改为ABB REX521系列微机保护装置,至今14年。
微机保护装置已超过厂家承诺的十年无故障质保期,在实际运行中存在较多问题,不利于安全长周期供电。
二、存在问题1.原设计选用的ABB REX521系列微机保护装置无PT断线功能,通过测量模块设置搭接完成的PT断线经调试无法实现该功能,如图A,可靠性低、故障率高,不利于继电保护安全运行;图A ABB微机保护装置PT断线逻辑图2.微机保护装置于2005年开始使用,超过10年安全使用期限,出现了不定期故障报警、死机、元器件老化、键盘不灵敏等问题,存在安全隐患。
3.原有进线微机保护装置无电压采集功能,两段电压均输入母联装置,通过逻辑判断后用于备自投功能,这种方式增加了进线与母联的联络电缆和连接点,无形中增加了故障点,且与我车间其他变电所备自投逻辑不同,不利于运行维护人员维护。
三、问题改进为了解决目前存在的问题,提高继电保护工作人员的技能水平,解决生产过程中的瓶颈问题,对39/149变电所继电保护进行完善。
1.更换微机保护装置,将A B B R E X521微机保护装置更换成西门子7SJ62系列微机保护装置。
2.在西门子7SJ62 4.9版本中实现PT 断线功能。
(1)首先开启西门子7SJ62 4.9版本中的VT断线功能,如图B。
图B PT断线逻辑配置图3.2.2由于PT断线功能需闭锁低电压保护,在I/O矩阵中进行闭锁低电压配置,如图C。
图C 闭锁低电压逻辑配置图(2)通过CONNECT功能块,将PT断线逻辑及闭锁低电压保护逻辑信息连接起来,实现PT断线功能,可靠闭锁低电压保护,如图D,提高供电可靠性。
图D PT断线逻辑及闭锁低电压逻辑连接图3.由于该所进线是由两个供电系统进行供电,不能并联,备自投功能长期退出。
红色飓风E45用户手册

5 硬件资源...................................................................................................................................................... - 14 -
核心模块.........................................................................................................................................................- 9 相关配件.........................................................................................................................................................- 9 应用领域.........................................................................................................................................................- 9 典型客户.........................................................................................................................................................- 9 相关文档.........................................................................................................................................................- 9 -
大族光纤激光切割机常用操作步骤

大族光纤激光切割机常用操作步骤程序在执行过程中停止程序在执行过程中,遇到非机床紧急停止类报警或按停止按钮停止时,可在消除报警后,按主操作面板上的机床复位按键复位报警,若机台在随动方式下最好先按“RETRACT”提升Z轴,然后直按启动按钮便可继续运行加工程序。
如其它要求可按以下两种方法操作:1.如果在切割过程中反渣,出现切割头传感器碰撞类报警导致机床停止时,可先“RETRACT”按键,将Z轴抬起一固定高度,然后人为将反渣清掉,复位报警后再启动程序便可继续运行加工程序。
2.如果在加工过程中,你需要暂停机床,并且要手动移动X或Y轴到机床近点以便更换切割喷嘴,更换完毕后重新回到加工状态,可按如下步骤操作:a.在自动模式下切割过程中,在非随动状态下按NC STOP对程序进行暂停。
b.在彩色显示器的控制板上选择手动,弹出程序自动执行是否要复位对话框,选择否,这时操作方式会切换到手动模式下;c. 选择连续进给模式;d.手动移动X或Y轴到机床近点,并且进行切割喷嘴更换操作;e.选择断点返回功能,按NC START,机床返回到程序中断的地方;f.切换到自动模式下,按NC START,继续加工。
程序在执行过程中中断程序在执行过程中,遇到机床紧急停止类报警出现或断电时,报警信号无法通过按主操作面板上的机床复位,按键复位报警,这时可按如下步骤操作:(断点返回功能)1. 机床重新回参考点,建立机床坐标系;2. 打开断电前正在执行的NC程序,查看该程序前面是否调用了Q999997子程序;3. 假如调用了Q999997,那么在手动编程方式下运行:N10 G54N20 G00X0Y0这样就可以找到工件零点;4. 重回工作零点后, 重新调用切割程序,再开启断点返回功能(点击使其变为),然后启动程序再次切割,程序会自动返回到中断点之前出光点所在轮廓的起始点开始继续切割。
断点返回功能:断点返回:在切割过程异常中断后再返回到中断点继续切割的功能。
杰克斯科技 4K HDR HDMI 矩阵开关 - 4x2(B-660-MTRX-4X2)用户手册说明
T o reduce the risk of fire or electric shock, read and follow all instructions and warnings in this manual. Keep this manual for future reference.1. Do not expose this apparatus to rain or moisture. Do not expose this equipment to drippingor splashing, and ensure that no objects filled with liquids, such as vases, are placed on the equipment. Do not use this apparatus near water.2. Do not remove cover. No user serviceable parts inside.3. Clean only with a dry cloth.4. Do not block any ventilation openings. Install according to manufacturer’s instructions.5. Do not install near any heat sources such as radiators, heat registers, stoves or otherapparatus (including amplifiers) that produce heat.6. Do not override the safety purpose of the polarized or grounding plug. A polarized plug hastwo blades, one of which is wider than the other. A grounding plug has two matching blades and a third grounding prong. The wide blade or the third prong is provided for your safety. If the provided plug does not fit into your outlet, consult an electrician for replacement of the obsolete outlet.7. Protect the power cord from being walked on or pinched, particularly at the plug end andwhere the power cord is attached to the apparatus.8. Only use attachments and accessories specified by the manufacturer.9. Refer all servicing to qualified service personnel. Servicing is required when the apparatushas been damaged in any way, such as when the power supply cord or plug is damaged, liquid has been spilled on or objects have fallen into the apparatus, the apparatus hasbeen exposed to rain or moisture, the apparatus does not operate normally, or it has been dropped.10. T o completely disconnect this equipment from power, disconnect the power supply cordfrom the power outlet.The lightning flash with arrowhead symbol, within an equilateral triangle, is intended to alert the user to the presence of uninsulated dangerous voltage within the product’s enclosure that may be of sufficient magnitude to constitute a risk of electric shock to persons.The exclamation point within an equilateral triangle is intended to alert the user to the presence of important operating and maintenance (servicing) instructions in the literature accompanying the appliance.2This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, thereis no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:• Reorient or relocate the receiving antenna.• Increase the separation between the equipment and receiver.• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.• Consult the dealer or an experienced radio/TV technician for help.Changes or modifications not expressly approved by the party responsible for compliance could void the user’s authority to operate the equipment.31. Product Overview (5)2. Features (5)3. Package Contents (5)4. Device Layout (6)4.1. B-660-MTRX-4x2 Front Panel (6)4.2. B-660-MTRX-4x2 Rear Panel (7)5. Installation & Wiring (8)5.1. Installation (8)5.2. Wiring (8)6. IR Remote control (10)7. RS-232 Control (10)8. Specifications (11)8.1. Transmission Distance (11)9. Warranty (12)10. Support (12)4The B-660-MTRX-4x2 is a 4K HDR 4x2 HDMI Matrix Switcher and allows up to four Ultra High Definition 4K HDR or 1080p HD inputs to be independently routed to two Ultra HD displays.For HDMI output 1, there is a 3.5mm analog and SPDIF optical audio output allowing audio to be extracted from the HDMI source connected to output 1. For HDMI output 2, there’s a SPDIF optical audio output, which can come from the HDMI output 2 source or the HDMI ARC from the TV. This audio is controlled by a dip slider setting on the unit. Each output port supports independent scaling and can be 4K or 1080P, even if the source is the same. The B-660-MTRX-4x2 features a RS-232 port for third party control system connection and control.2.• Routes four HDMI sources to two 4K HDR Ultra HD displays• HDCP 2.2 compliant• Supports up to 4K Ultra HD and DCI resolutions(4096x2160@60Hz)• Each output supports scaling from 4K to 1080P independently• Analog and digital audio de-embedded from output 1• Digital audio de-embedded from HDMI output 2 or HDMI ARC from TV• Supports 12-bit Deep Color, 3D, Lip Sync and loss-less HD audio formats pass through • Multiple control options, include RS-232, IR and push button controlsNote: If the input source is active, whether display device is connected or not, the audio de-embedding port will output normally.3.• 1 x B-660-MTRX-4x2 Matrix• 1 x DC 5V Power Adapter with US Pins• 1 x IR Remote• 1 x Phoenix Male Connector (3.5 mm, 3 Pins)• 2 x Mounting Brackets (with Screws)• 2 x Drywall Screws• 4 x Rubber Feet• 1 x Power Cord Sticker• 1 x Installation Manual54.1.B-660-MTRX-4x2 Front Panel1. POWER LEDOn: The device is powered on.Off: The device is powered off.2. OUTPUT1 SWITCH BUTTONPress to cycle through the active sources that are connected and available for Output 1.3. OUTPUT1 INPUT (1-4) LEDsOn: The HDMI input is selected and active for Output 1.Off: The HDMI input is not selected nor active for Output 1.4. OUTPUT2 SWITCH BUTTONPress to cycle through the active sources that are connected and available for Output 2.5. OUTPUT2 INPUT (1-4) LEDOn: The HDMI input is selected and active for Output 2.Off: The HDMI input is not selected nor active for Output 2.6. IR SENSORReceives IR from handheld IR Remote, IR Emitter, or IR Flasher.64.2. B-660-MTRX-4x2 Rear Panel1. +5V DCConnect to the provided DC 5V power adapter.2. HDMI IN (1-4)Connect to HDMI sources such as Blu-ray player, Media Player, or PC.3. HDMI OUT1Connect to an HDMI display such as a TV, Flat Panel Display, or Projector.4. SPDIF OUTConnect to audio devices such as AV system for digital de-embedded audio from HDMI OUT1.5. AUDIO OUTConnect to audio device such as Amplifier for analog de-embedded audio from HDMI OUT1.6. HDMI OUT2Connect to an HDMI display such as a TV.7. SPDIF OUTConnect to audio devices such as AV system for digital de-embedded audio output from HDMI OUT2 or ARC audio output from the TV connected to HDMI OUT2.8. DIP SWITCHDe-embedded: SPDIF OUT outputs de-embedded audio from HDMI OUT2 source.ARC: SPDIF OUT outputs the ARC audio from the TV connected to HDMI OUT2.9. RS-232Connect to a control PC or control system for RS232 serial control.75.5.1. InstallationThe B-660-MTRX-4x2 can be placed on a solid and stable surface, installed on a standard equipment rack shelf, or mounted to a wall or distribution box. When installed on a rack shelf, wall, or distribution box we strongly recommend that the included mounting ears be used to secure the device. When installing on a solid surface the use of the mounting ears is optional. Steps to install the switch using the supplied mounting ears:1. Attach the installation bracket to the enclosure using the screws provided in the packageseparately.2. The bracket is attached to the enclosure as shown.3. Repeat steps 1-2 for the other side of the unit.4. Mount the switch on a solid surface, rack shelf, wall, or distribution box with the includedmounting screws by screwing the mounting ears to the surface you are mounting to.5.2. WiringWarnings:• Before beginning any wiring be sure to disconnect the power from all devices in the system.• During wiring gently connect and disconnect the cables.Steps for device wiring:1. Connect HDMI INConnect the HDMI sources (such as PC, Blu-ray player, Apple TV, 4K media player, etc) to the HDMI IN 1-4. Ensure you are using a high-quality HDMI cable capable of supplying the maximum resolution you require2. Connect HDMI OUTConnect the HDMI display device (such as a TV, projector, LED/LCD display or otherdisplay device) to the HDMI OUT. Ensure you are using a high-quality HDMI cable capable of supplying the maximum resolution you require.83. Connect SPDIF OUT and AUDIO OUT• RS232 control: Connect a control PC or control system to RS232 port of the Matrix.• IR control: The IR Remote provided is for controlling the Matrix through IR signal.5. Connect the DC 5V power cord provided.6. Power on all attached devices.9106.The Matrix can be controlled by the IR Remote provided by pointing it directly at the IR sensor on front panel. This allows for selecting inputs (source) for each output (display) as well as power On and Off for connected CEC-enabled displays.Note:• While the battery is installed it is isolated from the internal contacts via a plastic tab. Be sure to remove this tab before operating the remote.• While the remote contains Output 3 and 4 these have no function on this matrix.Display of Output 1Display of Output 1Assigning Inputs (sources) to Outputs (display):1. On the remote locate the output to assign an input to, these are in order vertically from top to bottom labeled in the middle of the remote.2. Press the desired Input # or use thePrevious Next available inputs.Virtual IR Code Supported by Default (Matrix Switching Code)11Advanced users may need to control the matrix through RS232 serial communication.Connect a control PC or control system to the RS232 port of the receiver. API command for RS232 control is available in the separate document “API Command Set_ B-660-MTRX-4x2”. A professional RS232 serial interface software (e.g. Serial Assist) may be needed as well.Before executing the API command through RS232 serial connection, please ensure RS232interface of the device and the control PC are configured correctly.RS-232 Port Connection Pin outR T GN XX D TXRX G RS-232PortConnected RS-232Device PinsTransmission Distance8.1.122-Year Limited WarrantyThis Binary product has a 2-Year limited warranty. This warranty includes parts and labor repairs on all components found to be defective in material or workmanship under normal conditions of use. This warranty shall not apply to products that have been abused, modified or disassembled. Products to be repaired under this warranty must be returned to SnapAV or a designated service center with prior notification and an assigned return authorization number (RA).10.Need Help? Contact T ech Support!If you need further clarification, please call tech support at 800.838.5052, or email support@ . For other information, instructional videos, support documentation, or ideas, visit our website and view your item’s product page at .13Rev: 200331-1719© 2020 Binary。
新代参数设定参考手册--V9.5
新代科技參數設定說明手冊by : 新代科技date :2006/11/20ver : 9.5版本更新記錄目錄1.參數總表 (7)2.參數設定說明 (36)2.1 系統基本參數設定 (36)2.1.1 硬體環境設定 (36)2.1.1.1 軸卡基本參數設定 (36)2.1.1.1.1Pr01 軸板基址 (36)2.1.1.1.2Pr09 軸板型態 (37)2.1.1.1.3 Pr10 伺服警報接點型態 (37)2.1.1.1.4Pr11 軸卡時脈來源 (38)2.1.1.1.5Pr12 SERVO6 軸卡最高時脈 (38)2.1.1.1.6Pr13 軸卡數目 (38)2.1.1.2 I/O 卡基本參數設定 (39)2.1.1.2.1Pr03 I/O 板基址 (39)2.1.1.2.2Pr05 I/O 板組態 (39)2.1.1.2.3Pr15 I/O 卡數位濾波程度 (42)2.1.1.3 控制精度設定 (43)2.1.1.3.1 Pr17 控制精度 (43)2.1.1.4 螢幕功能鍵型態設定 (43)2.1.1.4.1 Pr3205 功能鍵型態 (43)2.1.1.5 螢幕型別 (44)2.1.1.5.1 Pr3211 螢幕型別 (44)2.1.1.6 預設外部存取資料磁碟機代號 (44)2.1.1.6.1 Pr3213 磁碟機代號 (44)2.1.1.7 選擇控制面板鍵盤型態 (44)2.1.1.7.1 Pr3217 選擇控制面板鍵盤型別 (44)2.1.1.8 系統掃瞄時間設定 (45)2.1.1.8.1 Pr3202 I/O 掃描時間 (45)2.1.1.8.2 Pr3203 運動補間時間 (45)2.1.1.8.3 Pr3204 PLC 掃描時間 (45)2.1.2 軟體介面環境參數設定 (46)2.1.2.1 應用功能參數設定 (46)2.1.2.1.1 Pr411 G00 運動方式 (46)2.1.2.1.2 Pr413 G92(G92.1)座標保留模式設定 (46)2.1.2.1.3 Pr414 工件座標系統保留模式 (46)2.1.2.1.4 Pr415 重置或關機時保留目前刀長資料 (47)2.1.2.1.5 Pr3207 C/S 界面版本編號 (47)2.1.2.1.6 Pr3215 選刀時呼叫副程式 (47)2.1.2.1.7 Pr3241 工件程式小數點型態 (47)2.1.2.1.8 Pr3243 鍵盤重置鍵由 PLC 處理 (48)2.1.2.1.10 Pr3801 G95 時進給量與主軸位置緊密偶合 (48)2.1.2.1.11 Pr3807 圓弧終點不在圓弧上檢查視窗 (49)2.1.2.1.12 Pr3809 UVW 為 XYZ 軸增量指令 (49)2.1.2.1.13 Pr3815 刀具半徑補償預看模式 (49)2.1.2.1.14 Pr3816 刀長補償模式 (49)2.1.2.1.15 Pr3819 過切檢查型態 (50)2.1.2.1.16 Pr3851 斷刀處理程式號碼 (50)2.1.2.2 系統人機介面設定 (51)2.1.2.2.1 Pr3201 設定啟動車床規則 (51)2.1.2.2.2 Pr3209 語言設定 (51)2.1.2.2.3 Pr3219 系統安裝組態 (52)2.1.2.2.4 Pr3221 除錯模式 (52)2.1.2.2.5 Pr3223 啟動系統管理功能 (53)2.1.2.2.6 Pr3225 螢幕保護功能延遲時間 (53)2.1.2.2.7 Pr3227 螢幕解析度 (53)2.1.2.2.8 Pr3229 關閉工件座標系統功能 (53)2.1.2.2.9 Pr3247 速率顯示方法 (54)2.2.伺服軸向參數設定 (55)2.2.1 各軸對應機械軸設定 (55)2.2.1.1 Pr21~Pr40 伺服對應的機械軸 (55)2.2.2 軸向馬達運動方向的設定 (55)2.2.2.1 Pr41~Pr60 馬達運動方向設定 (55)2.2.3 軸向命令與回授解析度設定 (56)2.2.3.1 Pr61~Pr80 位置感測器解析度 (56)Pr81~Pr100 軸卡回授倍頻 (56)Pr121~Pr160 螺桿側齒輪齒數,馬達側齒輪齒數 (56)Pr161~Pr180 螺桿寬度(Pitch) (56)Pr181~Pr200 伺服系統的位置迴路增益 (56)Pr201~Pr220 位置感測器型態 (56)Pr341~Pr360 位置命令倍率分子 (56)Pr361~Pr380 位置命令倍率分母 (56)2.2.4 各軸向應用型態設定 (58)2.2.4.1 Pr221~Pr226 軸型態 (58)2.2.4.2 Pr281~Pr300 選擇半徑軸或直徑軸 (59)2.2.5 各軸向顯示名稱設定 (59)2.2.5.1 P r321~Pr340 設定軸的名稱 (59)2.2.6 軸向控制模式設定 (60)2.2.6.1 Pr381~Pr400 位置伺服控制模式 (60)2.2.7 定位檢查功能設定 (60)2.2.7.1 Pr421~Pr440 切削時位置檢查的視窗範圍 (60)2.2.7.2 Pr481~Pr500 快速移動(Rapid T ravel, G00)時位置檢查的視窗範圍 (61)2.2.7.3 Pr561~Pr580 遺失位置檢查視窗 (61)2.2.8 各軸向左右軟體行程極限保護 (61)2.2.8.1 Pr2401~Pr2440 軟體第一行程保護的範圍 (61)2.2.8.2 Pr2441~Pr2480 軟體第二行程保護的範圍 (62)2.3.主軸參數設定 (63)2.3.1 主軸對應命令輸出埠設定 (63)2.3.1.1 Pr1621~Pr1630 主軸對應的機械軸或邏輯軸 (63)2.3.2 主軸命令參數設定 (63)2.3.2.1 Pr.1631~Pr.1636 主軸零速offset 速度 (63)2.3.2.2 Pr.1641~Pr.1646 主軸編碼器極性 (63)2.3.2.3 Pr.1651~Pr.1656 主軸馬達編碼器一轉的Pulse 數 (63)2.3.2.4 Pr.1661~Pr.1666 主軸回授倍頻 (64)2.3.2.5 Pr.1671~Pr.1676 主軸馬達增益 (64)2.3.2.6 Pr.1681~Pr.1692 主軸第一檔齒數比 (64)Pr.1901~Pr.1952 主軸第四檔齒數比 (64)2.3.2.7 P r.1711~Pr.1716 主軸是否安裝編碼器 (65)2.3.3 主軸運動轉速設定參數 (65)2.3.3.1 Pr.1721~Pr.1726 主軸寸動速度 (65)2.3.3.2 Pr.1731~Pr.1736 主軸最低轉速 (65)2.3.3.3 Pr.1801~Pr.1806 主軸最高轉速 (65)2.3.3.4 Pr.1821~Pr.1826 主軸伺服微分增益 (65)2.3.3.5 Pr.1831~Pr.1836 主軸加減速時間 (66)2.3.3.6 Pr.1851~Pr.1856 主軸重力加速度加減速時間 (66)2.3.4 主軸定位設定參數 (66)2.3.4.1 Pr.1741~Pr.1746 主軸定位速度 (66)2.3.4.2 Pr.1741~Pr.1746 主軸定位偏移量 (66)2.3.4.3 Pr.1771~Pr.1776 主軸原點偏移量 (66)2.3.4.4 Pr.1781~Pr.1786 主軸定位最低速度 (67)2.3.4.5 Pr.1791~Pr.1796 主軸馬達型態 (67)2.3.4.6 P r.1811~Pr.1816 主軸編碼器安裝位置 (67)2.3.4.7 Pr.1841~Pr.1846 主軸Y-Delta 切換速度 (67)2.4.軸向運動特性設定參數 (69)2.4.1 切削時前加減速運動規劃 (69)2.4.1.1 Pr401 切削加減速時間 (69)Pr402 重力加速度加減速時間 (69)Pr405 切削的最高進給速度 (69)Pr541~Pr560 各軸切削的加減速時間 (69)Pr621~Pr640 各軸切削的最高進給速度 (69)Pr641~Pr660 各軸重力加速度加減速時間 (69)2.4.2 切削時後加減速運動規劃 (71)2.4.2.1 Pr404 後加減速切削鐘型加減速時間 (71)2.4.3 切削時直線轉角自動減速功能 (73)2.4.3.1 P r406 轉角參考速度 (73)2.4.4 切削時圓弧切削運動最高進給速度設定 (74)2.4.4.1 Pr408 半徑5mm 圓弧切削參考速度 (74)2.4.5 快速移動及 JOG 時的加減速規劃 (75)2.4.5.1 Pr441~Pr460 各軸快速移動(G00)的加減速時間 (75)Pr461~Pr480 各軸快速移動(G00)的最高進給速度 (75)Pr501~Pr520 各軸快速移動(G00)的F0 速度 (75)Pr521~Pr540 各軸JOG 速度 (75)2.5.尋原點動作設定參數 (76)2.5.1 尋原點方式設定參數 (76)2.5.1.1 Pr961~Pr980 各軸尋原點方法 (76)2.5.2 尋原點動作規格與參數設定 (76)2.5.2.1 Pr821~Pr840 各軸第一段尋原點速度 (76)Pr841~Pr860 各軸第二段尋原點速度 (76)Pr861~Pr880 各軸尋原點為負方向 (76)2.5.3 原點偏移功能設定參數 (77)2.5.3.1 Pr881~Pr900 原點的偏移量設定 (77)2.5.4 原點柵格量功能設定參數 (78)2.5.4.1 Pr941~Pr960 啟動尋原點柵格功能 (78)2.6.手輪功能設定參數 (80)2.6.1 手輪訊號輸入設定參數 (80)2.6.1.1 Pr2031~Pr2034 手輪對應的機械軸 (80)2.6.2 手輪訊號解析度設定參數 (80)2.6.2.1 Pr2041~Pr2044 手輪Encoder 一轉的Pulse 數 (80)Pr2051~Pr2054 手輪回授倍頻 (80)2.6.3 手輪段數設定參數 (80)2.6.3.1 Pr2001 手輪第四段倍率設定 (80)2.6.4 手輪模擬功能設定參數 (81)2.6.4.1 Pr2003 手輪模擬對應手輪號碼 (81)2.6.5 手輪驅動軸向功能設定參數 (81)2.6.5.1 Pr2031~Pr2033 手輪對應的座標軸 (81)2.6.5 手輪設定參數 (81)2.6.5.1 Pr2031~Pr2033 手輪對應的座標軸 (81)2.7.機構補償功能設定參數 (82)2.7.1 尖角誤差補償設定參數 (82)2.7.1.1 Pr1361~Pr1380 圓弧尖角正向誤差補償量 (82)Pr1381~Pr1400 圓弧尖角誤差補償時間常數 (82)Pr1361~Pr1400 圓弧尖角負向誤差補償量 (82)2.8.軸耦合功能設定參數 (85)2.8.1 軸耦合功能設定參數 (85)2.8.1.1 Pr1361~Pr1380 圓弧尖角正向誤差補償量 (85)Pr1381~Pr1400 圓弧尖角誤差補償時間常數 (85)Pr1361~Pr1400 圓弧尖角負向誤差補償量 (85)1.參數總表2.參數設定說明2.1 系統基本參數設定2.1.1 硬體環境設定2.1.1.1 軸卡基本參數設定2.1.1.1.1 Pr01 軸板基址1.Servo_4 軸卡對應 I/O 基址與跳線規則:軸卡二片以下 Pr01今800 軸卡超過二片 Pr01今7682.S ervo_6 的第一片軸卡基址為768(目前一部控制器僅支援一張 Servo_6,不可與 Servo_4 混插)3.E mbedded 第一片軸卡基址固定為5122.1.1.1.2 Pr09 軸板型態0:EMP21:SVO4+不檢查伺服警報2:SVO4+伺服警報接點為常開接點 Normal Open( A 接點)3:SVO4+伺服警報接點為常閉接點 Normal Close( B 接點)4:EMP45:SERVO69:虛擬軸卡2.1.1.1.3 Pr10 伺服警報接點型態0: SERVO 6 軸卡警報為常開接點 Normal Open( A 接點)1: SERVO 6 軸卡警報為常閉接點 Normal Close( B 接點)2.1.1.1.4 Pr11 軸卡時脈來源此參數為設定軸卡時脈來源:設定 0 為使用軸卡自已時脈設定 1 為共用控制器底板 IPC Bus 時脈設定 2 為共用主機板 VIA 時脈設定原則:一體機控制器今請設定『0』非一體機控制器今請設定『2』舊型 486 主機板控制器今請設定『1』2.1.1.1.5 Pr12 SERVO6 軸卡最高時脈此參數為設定 Servo6 軸版最高時脈。
西格玛泰克 CCP 521 说明书

C-DIAS Processor Module CCP 521 The CCP 521 processor module runs the control program andthereby represents an essential component of an automation system.The internal DC/DC converter powers all modules on aC-DIAS module carrier.The VARAN bus, the CAN bus, an Ethernet interface or the USBdevice (Mini USB) can be used as the online interface connection.A 7-segment display and 2 status LEDs provide information on theactual status of the CPU.For program updates, the integrated USB Host interface can be used(USB stick, keyboard). With help from the exchangeable SD card,the entire control program can be easily exchanged.The CCP 521 processor module is designed to be mounted in thecontrol cabinet.CompatibilityCompletely PC-compatible. The CCP 521 works with standard PC BIOS and therefore no SIGMATEK-specific BIOS is needed; the LASAL operating system in provided.Technical DataPerformance dataProcessor EDGE-Technology X86 compatibleAddressable I/O/P modules VARAN bus: 65,280CAN bus: 32C-DIAS bus: 8Internal I/O NoInternal cache 32-kbyte L1 Cache256-kbyte L2 CacheBIOS AMI64 MbytesInternal program and data memory (DDR2RAM)Internal remnant data memory 512 KbytesInternal storage device (IDE) 1-Gbyte micro SD cardInterface connections 1 x USB Host 2.0 (full speed 12 Mbit/s)1 x USB Device 1.11 x Ethernet1 x CAN1 x VARAN1 x C-DIASData buffer YesStatus display YesStatus LEDs YesReal-time clock Yes (buffering approximately 10 days)Electrical requirementsSupply voltage +18 – 30 V DCTypically 150 mA Maximum 500 mA Current consumption of (+24 V)power supplyStarting current For a very short time (~20 ms) : 30 APower supply on the C-DIAS bus Supplied by the CCP 521Maximum 1.2 ACurrent load on C-DIAS bus(power supply for I/O/P modules).Standard configurationEthernet 1 IP: 10.10.150.1 Subnet-Mask: 255.0.0.0 CAN bus Station: 00 Baud rate: 01 = 500 kBaud Problems can arise if a control is connected to an IP network, which contains mod-ules that do not contain a SIGMATEK operating system. With such devices, Ethernet packets could be sent to the control with such a high frequency (i.e. broadcasts), that the high interrupt load could cause a real-time runtime error. By configuring the packet filter (Firewall or Router) accordingly however, it is possible to connect a network with SIGMATEK hardware to a third party network without triggering theerror mentioned above.MiscellaneousArticle number 12-104-521Hardware version 1.xProject back-up Internally on the micro SD cardStandard UL in preparation Environmental conditionsStorage temperature -10 – +85 °COperating temperature 0 – +50 °CHumidity 10 - 90 %, uncondensedEMV stability According to EN 61000-6-2 (industrial area) Shock resistance EN 60068-2-27 150 m/s² Protection Type EN 60529 IP 20Mechanical DimensionsConnector LayoutX1: USB Device 1.1X2: USB Host 2.0It should be noted that many USB devices on the market do not comply with the relevant EMC standards for industrial environments. Connecting such a device can lead to malfunc-tions.Pin Assignment1 +5 V2 D-3 D+4 -5 GNDPin Assignment1 +5 V2 D-3 D+4 GNDPin Assignment1 TX+2 TX-3 RX+4 -5 -6 RX-7 - 8-PinAssignment 1 TX+ / RX+ 2 TX- / RX- 3 RX+ / TX+4 -5 -6 RX- / TX-7 - 8 -X3: EthernetX4: VARANX5: CAN-BusPin Assignment1 CAN A (CAN LOW)2 CAN B (High)3 CAN A (CAN LOW)4CAN B (High)5 GND6 -Pin Assignment1 +24 V supply2 GNDX6: Power plugX7: micro SD cardSandisk SDSDQ-1024-KExchanging the micro SD cardThe micro SD card is located under the LED cover.To exchange the micro SD card, carefully lift the LED cover. The micro SD card is located on the left side and can be disengaged by lightly pressing on the card itself.Remove the micro SD card.Applicable connectorsUSB Device: 5-pin, type mini BUSB Host: 4-pin, type AEthernet: 8-pin, RJ45VARAN: 8-pin, RJ45CAN-Bus: 6-pin Weidmüller plug, B2L3, 5/6Supply: 2-pin Phoenix plug with screw terminal technology MC1, 5/2-ST-3,52-pin Phoenix plug with spring terminal FK-MCP1, 5/2-ST-3Status DisplaysEthernetDescriptionLED ColorActive Yellow Lights when data is exchanged over EthernetLink Green Lights when the connection between the two PHYs is establishedVARANDescriptionLED ColorActive Yellow Lights when data is exchanged over the VARAN busLink Green Lights when the connection between the two PHYs is establishedControlDescriptionLED ColorERROR Red Lights when an error occurs (defective USV)DCOK Green Lights when the power supply is OK11 26.05.2010 PageDisplayThe CCP 521 processor module has a 2-digit decimal display (7 segment display) for the following functions:- When configuring the processor module, the parameters are shown in the display. - If an error occurs while running the program or no valid user program is found, the display shows an error message. Thereby, "Er" (error) and the error code are displayed alternat-ingly. The same error code is also shown in the LASAL status line.- While running the program, the display can be used to show digits using the system vari-able _cpuDisplay. Valid values are 0 to 255; values over 99, however, are not shown and the display remains dark.Page 12 26.05.2010CAN Bus SetupThis section explains how to configure a CAN bus correctly. The following parameters mustfirst be set: Station number and data transfer rate.CAN bus station numberEach CAN bus station is assigned its own station number. With this station number, datacan be exchanged with other stations connected to the bus. Up to 31 stations can be in-stalled in a CAN bus system. However, each station number can only be assigned once.CAN bus data transfer rateThe data transfer rate (baud rate) for the CAN bus can be set. However, the longer thelength of the bus, the smaller the transfer rate that must be selected.Value Baud rate Maximum length00 615 kBit/s 60 m01 500 kbit/s 80 m02 250 kBit/s 160 m03 125 kBit/s 320 m04 100 kBit/s 400 m05 50 kBit/s 800 m06 20 kBit/s 1200 m07 1 Mbit / s 30 mThese values are valid for the following cable: 120 Ω, Twisted Pair.NOTE: the following is valid for the CAN bus protocol: 1 kBit/s = 1 kBaud.13 26.05.2010 PageConfiguration of the Process ModulePage 14 26.05.2010To enter the mode for setting changes, press and hold the SET button while the C-IPC isbooting.When the following appears in the display:the SET button can be released.After releasing the SET button, the first menu appears in the display.With several short presses of the SET button, it is possible to switch through the variousmenu points. By pressing the SET button for approximately 1.5 s, the menu is accessedand the setting can be changed with short presses.Once the desired changes are made, press the SET button for about 5 seconds to end theprocess. If the changes are to be discarded, press the RESET button to restart the C-IPC.The settings for the IP address, subnet mask and gateway are hexadecimal, whereas in theleft and right digits, 0 - F must be entered separately. The switch occurs when the SETbutton is pressed for about 1.5 s.The values from AUTOEXEC.LSL are used as the standard settings; changes are writtenback to this file. Before this, the original content of the file is written to AUTOEXEC.BAK.a26.05.2010 Page15C1 ... CAN PLC station00 – 30 ... Station numberC2 ... CAN PLC baud rate00 ... 615.00001 … 500.00002 … 250.00003 … 125.00004 … 100.00005 … 50.00006 … 20.00007 … 1.000.000I1, I2, I3, I4 IP address I1.I2.I3.I4,Hexadecimal00 – FF respectivelyS1,S2,S3,S4 Subnet Mask S1.S2.S3.S4,hexadecimal00 – FF respectivelyG1,G2,G3,G4 Gateway G1,G2.G3.G4,hexadecimal00 – FF respectivelyaPage 16 26.05.2010CAN Bus TerminationIn a CAN bus system, both end modules must be terminated. This is necessary to avoid transmission errors caused by reflections in the line.CAN-Bus-D-SUB-plug with terminating resistorsIf the CCP 521 processor module is an end module, it can be terminated by placing a 150-Ohm resistor between CAN-A (Low) and CAN-B (High).1 x 150-Ohm resistor26.05.2010 Page 17Wiring and Mounting InstructionsEarth ConnectionThe CCP 521 must be connected to earth over the mounting on the back wall of the control cabinet or over the earth terminal provided (C-DIAS module carrier). It is important to create a low-ohm earth connection, only then can error-free operation be guaranteed. The earth connection should have the maximum cross section and the largest electrical surface pos-sible.Any noise signals that reach the CCP 521 over external cables must be filtered out over the earth connection. With a large (electrical) surface, high frequency noise can also be well dissipated.Page 18 26.05.2010ShieldingThe wiring for the CAN bus, Ethernet and VARAN bus must be shielded. The low-ohmshielding is either connected at the entry to the control cabinet or directly before the CCP521 processor module over a large surface (cable grommets, grounding clamps)!Noise signals can therefore be prohibited from reaching the electronics and affecting thefunction.ESD ProtectionBefore any device is connected to or disconnected from the CCP 521, the potential withground should be equalized (by touching the control cabinet or earth terminal). Static elec-tricity (from clothing, footwear) can therefore be reduced.19 26.05.2010 PageProcess DiagramPage 20 26.05.2010Status and Error MessagesStatus and error messages are shown in the status test of the Lasal Class software. If the CPU has a status display, the status or error number is also show here as well. POINTER or CHKSUM messages can also be shown on the terminal screen.Number Message Definition Cause/solution00 RUN RAM The user program is currently running inRAM.The display is not affected.01RUN ROM The user program in the program memorymodule was loaded into the RAM and iscurrently being run.The display is not affected.02 RUNTIME The total duration of all cyclic objects ex-ceeds the maximum time; the time can beconfigured using 2 system variables:-Runtime: time remaining-SWRuntime: pre-selected value for theruntime counter03 POINTER Incorrect program pointers were detectedbefore running the user program Possible Causes:- The program memory module is missing, not programmed or defect.- The program in the user program memory (RAM) is not executable.- The user program is overwriting a software errorSolution:- Reprogram the memory module, if the error reoccurs exchange the module.- Correct programming error04 CHKSUM An invalid checksum was detected beforerunning the user program.Cause/solution: s. POINTER05 Watchdog The program was interrupted throughthe watchdog logic. Possible Causes:- User program interrupts blocked over a longer period of time (STI command forgotten)- Programming error in a hardware interrupt.- INB, OUTB, INW, OUTW instruc-tions used incorrectly.- The processor is defect.Solution:- Correct programming error.- Exchange CPU.06 GENERALERRORGeneral error07 PROM DE-FECT An error has occurred while program-ming the memory module.Cause:- The program memory module isdefect.- The user program is too large.- The program memory module ismissing.Solution:- Exchange the program memorymodule08 Reset The CPU has received the reset signaland is waiting for further instructions.The user program is not processed.09 WD DEFEKT The hardware monitoring circuit (watch-dog logic) is defect.After power-up, the CPU checks thewatchdog logic function. If an erroroccurs during this test, the CPU deliber-ately enters an infinite loop from whichno further instructions are accepted.Solution: Exchange CPU.10 STOP11 PROG BUSYS12 PROGRAMLENGTH13 PROG END The memory module was successfullycompleted.14 PROG MEMO The CPU is currently programming thememory module.15 STOP BRKPT The CPU was stopped by a breakpointin the program.16 CPU STOP The CPU was stopped by the PG soft-ware (F6 HALT in status test).17 INT ERROR The CPU has triggered a false interruptand stopped the user program or hasencountered an unknown instructionwhile running the program. Cause:- A nonexistent operating system was used.- Stack error (uneven number of PUSH and POP instructions).- The user program was interrupted by a software error.Solution:- Correct programming error.18 SINGLESTEP The CPU is in single step mode and is waiting for further instructions.19 Ready A module or project has been sent to theCPU and it is ready to run the program.20 LOAD The program has stopped and is receiv-ing a module or project.21 UNZUL.Modul The CPU has received a module, which does not belong to the project.22 MEMORYFULL The operating system memory /Heap) is too small. No more memory could be reserved, when an internal or interface function was called from the application.23 NOT LINKED When starting the CPU, a missingmodule or a module that does notbelong to the project was detected.24 DIV BY 0 A division error has occurred. Possible Causes:- Division by 0.- The result of a division does not fit inthe result register.Solution:- Correct programming error.25DIAS ERRORAn error has occurred while accessing a DIAS module.Possible Causes: - An attempt is made to access a nonexistent DIAS module.- DIAS bus error.Solution:- Check the DIAS bus- Check the termination resis-tors.26 WAIT The CPU is busy.27 OP PROG The operating system is currentlybeing reprogrammed.28 OP INSTALLED The operating system has been reinstalled.29 OS TOO LONGThe operating system cannot be loaded; too little memory. 30NO OPERATING SYSTEMBoot loader message.No operating system found inRAM.31 SEARCH FOR OS The boot loader is searching for the operating system in RAM. 32 NO DEVICE 33 UNUSED CODE34MEM ERRORThe operating system loaded does not match the hardware configuration. 35 MAX IO36 MODULE LOAD ERRORThe LASAL Module or project cannot be loaded.37GENERELLER BS-FEHLER A general error has occurred while loading the operating sys-tem.38 APPLMEM ERROR An error has occurred in the application memory (user heap). 39 OFFLINE 40 APPL LOAD 41APPL SAVE46 APPL-LOAD-ERROR An error has occurred whileloading the application.47 APPL-SAVE-ERROR An error has occurred whileattempting to save the application.50 ACCESS-EXCEPTION-ERROR Read or write access of a re-stricted memory area. (I.e. writing to the NULL pointer).51 BOUND EXCEEDED An exception error caused byexceeding the memory limits52 PRIVILEDGED INSTRUC-TION An unauthorized instruction for the current CPU level was given. For example, setting the segment register.53 FLOATING POINT ERROR An error has occurred during afloating-point operation.60 DIAS-RISC-ERROR Error from the Intelligent DI-ASMaster.64 INTERNAL ERROR An internal error has occurred, allapplications are stopped. Restart; report error to Sig-matek.65 FILE ERROR An error has occurred during a fileoperation.66 DEBUG ASSERTIONFAILED Internal error. Restart; report error to Sig-matek.67 REALTIME RUNTIME The total duration of all real-timeobjects exceeds the maximumtime; the time cannot be config-ured.2 ms for 386 CPUs1 ms for all other CPUsStarting from Version 1.1.768 BACKGROUND RUNTIME The total time for all backgroundobjects exceed the maximumtime; the time can be configuredusing two system variables:-BTRuntime: time remaining-SWBTRuntime: pre-selectedvalue for the runtime counter95 USER DEFINED 0 User-definable code.96 USER DEFINED 1 User-definable code.97 USER DEFINED 2 User-definable code.98 USER DEFINED 3 User-definable code.99 USER DEFINED 4 User-definable code.100 C_INIT Initialization start; the configura-tion is run.101 C_RUNRAM The LASAL project was success-fully started from RAM.102 C_RUNROM The LASAL project was success-fully started from ROM.103 C_RUNTIME104 C_READY The CPU is ready for operation.105 C_OK The CPU is ready for operation.106 C_UNKNOWN_CID An unknown class from a stand-along or embedded object: un-known base class.107 C_UNKNOWN_CONSTR The operating system classcannot be created; the operatingsystem is probably wrong.108 C_UNKNOWN_OBJECT Reference to an unknown objectin an interpreter program, creationof more than one DCC080 object. 109 C_UNKNOWN_CHNL The hardware module number isgreater than 60.110 C_WRONG_CONNECT No connection to the requiredchannels.111 C_WRONG_ATTR Wrong server attribute.112 C_SYNTAX_ERROR No specific error, recompile alland reload project components.113 C_NO_FILE_OPEN An attempt was made to open anunknown table.114 C_OUTOF_NEAR Memory allocation error115 C_OUT OF_FAR Memory allocation error116 C_INCOMAPTIBLE An object with the same name exists buthas another class.117 C_COMPATIBLE An object with the same name and classexists but must be updated.224 LINKING The application is currently linking.225 LINKING ERROR An error has occurred while linking. Anerror messaged is generated in theLASAL status window.226 LINKING DONE Linking is complete.230 OP BURN The operating system is currently beingburned into the Flash memory.231 OP BURN FAIL An error has occurred while burning theoperating system.232 OP INSTALL The operating system is currently beinginstalled.240 USV-WAIT The power supply was disconnected; theUPS is active.241 Reboot The operating system is restarted.242 LSL SAVE243 LSL LOAD252 CONTINUE253 PRERUN The application is started.254 PRERESET The application is ended.255 CONNECTIONBREAKApplication exceptionsSRAM and IRQ routinesWriting remnant data during interrupt routines is not allowed and leads to a system crash. SRAM and consistency of changed dataIf more than 32 different sectors are changed (512 bytes each) shortly before shutting down the voltage supply while the user program is writing to the micro SD card, this can some-times lead to partial loss of remnant data.The file system does not support safe writing through SRAMIf files are stored, modified or written on the micro SD card from the user program, these files must always be stored with a fixed maximum size. Since changes in size and the simul-taneous shutdown of the voltage supply can corrupt the file system, a later change in the file size is not allowed.Data BreakpointThis CPU does not support the data breakpoint is a feature.Recommended Shielding for VARANThe real-time VARAN Ethernet bus system exhibits very robust characteristics in industrial environments. Through the use of IEEE 802.3 standard Ethernet physics, the potentials between an Ethernet line and sending/receiving components are separated. Messages to a bus participant are immediately repeated by the VARAN Manager in the event of an error. The shielding described below is principally recommended.For applications in which the bus is run outside the control cabinet, the correct shielding is required. Especially when for structural reasons, the bus line must be placed next to strong electromagnetic interference. It is recommended to avoid placing Varan bus lines parallel to power cables whenever possible.SIGMATEK recommends the use of CAT5e industrial Ethernet bus cables.For the shielding, an S-FTP cable should be used.An S-FTP bus is a symmetric, multi-wire cable with unshielded pairs. For the total shielding, a combination of foil and braiding is used. A non-laminated variant is recommended.The VARAN cable must be secured at a distance of 20 cm from the connector forprotection against vibration!1. Wiring from the Control Cabinet to an External VARAN Com-ponentIf the Ethernet lines are connected from a VARAN component to a VARAN node located outside the control cabinet, the shielding should be placed at the entry point to the control cabinet housing. All noise can then be dissipated before reaching the electronic compo-nents.2. Wiring Outside of the Control CabinetIf a VARAN bus cable must be placed outside of the control cabinet, additional shielding is not required. Outside of the control cabinet, IP67 modules and connectors are used exclu-sively. These components are very robust and noise resistant. The shielding for all sockets in IP67 modules is electrically connected internally or over the housing, whereby voltage spikes are not deflected through the electronics.3. Shielding for Wiring Within the Control CabinetSources of strong electromagnetic noise located within the control cabinet (drives, Trans-formers, etc.) can induce interference in a VARAN bus line. Voltage spikes are dissipated over the metallic housing of a RJ45 connector. Noise is conducted over the control cabinet without additional measures needed on the circuit board of electronic components. To avoid error sources with data exchange, it is recommended that shielding be placed before any electronic components in the control cabinet.4. Connecting Noise-Generating Components.When connecting power lines to the bus that generate strong electromagnetic noise, the correct shielding is also important. The shielding should be placed before a power element (or group of power elements).5. Shielding Between Two Control CabinetsIf two control cabinets must be connected over a VARAN bus, it is recommended that the shielding be located at the entry points of each cabinet. Noise is therefore prevented from reaching the electronic components in both cabinets.。