材料力学第七章
材料力学第七章

– –
三、汽车越过台阶、壕沟的能力:
– 汽车在行驶个常常要克服台阶、壕沟等障碍。 – 由于此时车速很低,故可用解静力学平衡方 程来求得汽车越障能力与其参数间的关系。 – 在此,我们不讲述推导过程,只给出结论及 分析。
14/3
•
4*2后驱动汽车前轮越过 台阶的能力:
– 通过解析求解,可得前轮 单位车轮直径可克服的台 阶高度为:
17/3
• 汽车越过壕沟的情形如图7—5 所示,可以看出,它与过台阶 时情况相似,因此汽车跨越壕 沟的性能也和越过台阶的情况 一样,可以用壕沟宽度与车轮 直径D之比来评价:
18/3
• 因此,只要求出汽车越 过垂直障碍的能力,即 可由上式确定越过壕沟 的宽度与车轮直径的比 值,从而求得能跨越的 壕沟宽度。
1/3
7.1 汽车通过性评价指标及几 何参数 7.2 影响汽车通过性的因素
2/3
汽车通过性:汽车 以足够高的平均车 速通过各种坏路和 无路地带(如松软地 面、坎坷不平地段) 和各种障碍(陡坡、 侧坡、壕沟、台阶、 灌木丛、水障)的 能力。
•根据地面对汽车通过 性影响的原因,它又 分为支承通过性和几 何通过性; •汽车的通过性主要取 决于地面的物理性质 及汽车的结构参数和 几何参数; •也与汽车的其它使用 性能(如动力性、平顺 性、机动性、稳定性、 视野性)有关。
7/3
与间隙失效有关的汽车整车几何尺寸称为 汽车通过性的几何参数。这些参数包括最小离 地间隙、纵向通过角、接近角、离去角、最小 转弯直径,转弯通道圆等,见下图:
8/3
最小离地间隙hmin:
汽车满载、静止时,支承平面与汽车 上的中间区域(0.8b范围内)最低点之间 的距离。 它反映了汽车无碰撞地通过地面凸起 的能力。
材料力学第七章应力状态和强度理论

x y 2 a 0 2
x y x y 2
x y
2
) x
2
2
例题1: 已知:单元体各侧面应力 x=60MPa,
求: (1) = - 450斜截面上的应力,(2)主应力和主平面
dA
y
x y
2
sin 2 xy cos2
y
yx
应力圆
y
1 R 2
x
y
2
4 2 xy
x
yx xy x
y
R c
x y
2
2
x
xy
x´
dA
yx
y´
y
x y 1 2 2 2
40
x y
2 0.431MPa
sin( 80 ) xy cos(80 )
C
C
C
例题3:已知梁上的M、Q,试用单元体表示截面上1、2、
3、4点的应力状态。
1
2 0
2
1点 2点
1 2 0 3
3Q = 2A
M x Wz
2 xy
x y
2 20.6 0.69 60 0
17.2
x y
2 (
6.4MPa
2 34.4
max(min)
x
17.20
x y
2
) xy
2
2
x
66.4MPa
60 0 60 0 2 ( ) 20.6 2 2 2 66.4(6.4) MPa
材料力学第七章

因而横截面仍保持平面,并与挠曲轴正交
2
第七章 梁的变形
挠度与转角
v q F v ө
x
ө、
挠度-横截面形心在垂直于梁轴方向的位移
v v( x) -挠曲轴方程
转角-横截面的角位移
( x ) -转角方程 挠度与转角的关系
(忽略剪力影响)
第七章
dv ' tan ' (小变形) dx
第三节 计算梁位移的叠加法
例7: 悬臂梁 AB,用短梁 DG 加固,试分析加固效果
解:1. 静不定分析
vC vG
FR (l/2) 3 FR l 3 vG 3EI 24 EI
Fa 3 v2 3EI
求位移之和(代数或矢量和) 在分析某梁段的变形在需
第七章
v v1 v2 Fa ( l a ) ()
3 EI
2
求位移处引起的位移时, 其余梁段视为刚体
16
第三节 计算梁位移的叠加法
例 题
例1: q(x)=q0cos(px/2l),利用叠加法求 vB=?
第七章
dv2 Fb 2 F x2 ( x2 a ) 2 C 2 dx2 2 EIl 2 EI
Fb 3 v1 x1 C1 x1 D1 6 EIl
Fb 3 F v2 x2 ( x2 a)3 C2 x2 10 2 D 6 EIl 6 EI
第二节 用积分法求梁的变形
3 5 Fl 3 FByl vB -物理方程 48EI 3EI
3 3
vB 0
-变形协调条件
5F 16 M A 0, 得 M A 3Fl / 16 FBy
FByl 5Fl 0 -补充方程 48EI 3EI 第七章 综合考虑三方面
材料力学 第07章 应力状态分析与强度理论

sin2a t xy cos2a
18/95
7.2 平面应力状态分析 主应力 7.2.3 主平面的方位及极值正应力 s x s y s x s y sa cos2a t xy sin2a 2 2 s x s y ds a 上式对a 求导 2 sin2a t xy cos2a da 2 s x s y 若a a0时,导数为 0 sin2a 0 t xy cos2a 0 0 2 2t xy tan2a 0 s x s y
7.2.5 应力圆
t
sx
tyx
sy
sx txy sy
D(sx,txy) 1. 确定点 D (s ,t ) x xy
O
D'(sy,tyx)
C
s
2. 确定点D' (sy,tyx) tyx= -txy 3. 连接DD'与s 轴交于点C 4. 以 C 为圆心,CD(CD') 为半径画圆。
26/95
7.2 平面应力状态分析 主应力 7.2.5 应力圆
sx sy sz
sxs1 100 MPas 2
0 MPas 3 120 MPa
11/95
7.1 一点的应力状态的概念 单向、二向(平面)、三向(空间)应力状态 三个主应力中仅有一个主应力不为零 单向应力状态
s1
s1
F
A
F
12/95
7.1 一点的应力状态的概念 单向、二向(平面)、三向(空间)应力状态
O
D'(sy,tyx)
C sx- sx sy/2
s
27/95
7.2 平面应力状态分析 主应力 7.2.5 应力圆 利用应力圆确定角a 斜截面上的正应力和切应力
材料力学 第七章
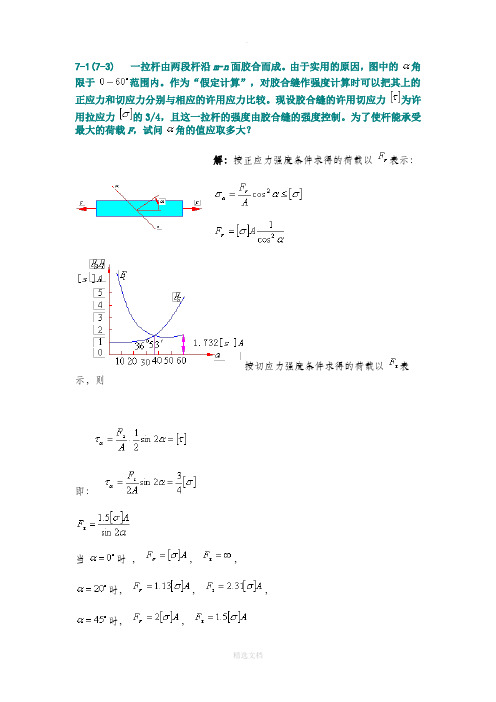
7-1(7-3) 一拉杆由两段杆沿m-n面胶合而成。
由于实用的原因,图中的角限于范围内。
作为“假定计算”,对胶合缝作强度计算时可以把其上的正应力和切应力分别与相应的许用应力比较。
现设胶合缝的许用切应力为许用拉应力的3/4,且这一拉杆的强度由胶合缝的强度控制。
为了使杆能承受最大的荷载F,试问角的值应取多大?解:按正应力强度条件求得的荷载以表示:按切应力强度条件求得的荷载以表示,则即:当时,,,时,,,时,,时,,由、随而变化的曲线图中得出,当时,杆件承受的荷载最大,。
若按胶合缝的达到的同时,亦达到的条件计算则即:,则故此时杆件承受的荷载,并不是杆能承受的最大荷载。
返回7-2(7-7) 试用应力圆的几何关系求图示悬臂梁距离自由端为0.72m的截面上,在顶面以下40mm的一点处的最大及最小主应力,并求最大主应力与x轴之间的夹角。
解:=由应力圆得返回7-3(7-8) 各单元体面上的应力如图所示。
试利用应力圆的几何关系求:(1)指定截面上的应力;(2)主应力的数值;(3)在单元体上绘出主平面的位置及主应力的方向。
解:(a),,,,(b),,,,(c), , ,(d),,,,,返回7-4(7-9) 各单元体如图所示。
试利用应力圆的几何关系求:(1)主应力的数值;(2)在单元体上绘出主平面的位置及主应力的方向。
解:(a),,,(b),,,(c),,,(d),,,返回7-5(7-10) 已知平面应力状态下某点处的两个截面上的应力如图所示。
试利用应力圆求该点处的主应力值和主平面方位,并求出两截面间的夹角值。
解:由已知按比例作图中A,B两点,作AB的垂直平分线交轴于点C,以C为圆心,CA或CB为半径作圆,得(或由得半径)(1)主应力(2)主方向角(3)两截面间夹角:返回7-6(7-13) 在一块钢板上先画上直径的圆,然后在板上加上应力,如图所示。
试问所画的圆将变成何种图形?并计算其尺寸。
已知钢板的弹性常数E=206GPa,=0.28。
材料力学第七章知识点总结
p
σα
α
τα
)
(−
B
各边边长,
d x d y
σ
x
σ
y σ
z
τ
xy
τ
yx
τ
yz
τ
zy
τ
zx
τ
xz
(2) 应力状态的分类
a、单向应力状态:只有一个主应力不等于零,另两个主应力
都等于零的应力状态。
b、二向应力状态:有两个主应力不等于零,另一个主应力
等于零的应力状态。
c、三向应力状态:三向主应力都不等于零的应力状态。
平面应力状态:单向应力状态和二向应力状态的总称。
空间应力状态:三向应力状态
简单应力状态:单向应力状态。
复杂应力状态:二向应力状态和三向应力状态的总称。
纯剪切应力状态:单元体上只存在剪应力无正应力。
y
x
σx
σy
σz
τxy τyx
τyz
τzy τzx
τxz
x
y
σx
σy
τyx
τxy
τ第一个下标表示微面元方向,第二个下标表示面元上力的方向
空间问题简化
为平面问题
α——由o
c
b
σττ
σ
ττ
τ
max τ
min
τα
D
A
H
3040MPa
7.27422
)
7.27(=−−
σ
x
σ
y σ
z
τ
xy
τ
yx
τ
yz
τ
zy
τ
zx
τ
xz
y
x
z。
材料力学第七章知识点总结
p
σα
α
τα
)
(−
B
各边边长,
d x d y
σ
x
σ
y σ
z
τ
xy
τ
yx
τ
yz
τ
zy
τ
zx
τ
xz
(2) 应力状态的分类
a、单向应力状态:只有一个主应力不等于零,另两个主应力
都等于零的应力状态。
b、二向应力状态:有两个主应力不等于零,另一个主应力
等于零的应力状态。
c、三向应力状态:三向主应力都不等于零的应力状态。
平面应力状态:单向应力状态和二向应力状态的总称。
空间应力状态:三向应力状态
简单应力状态:单向应力状态。
复杂应力状态:二向应力状态和三向应力状态的总称。
纯剪切应力状态:单元体上只存在剪应力无正应力。
y
x
σx
σy
σz
τxy τyx
τyz
τzy τzx
τxz
x
y
σx
σy
τyx
τxy
τ第一个下标表示微面元方向,第二个下标表示面元上力的方向
空间问题简化
为平面问题
α——由o
c
b
σττ
σ
ττ
τ
max τ
min
τα
D
A
H
3040MPa
7.27422
)
7.27(=−−
σ
x
σ
y σ
z
τ
xy
τ
yx
τ
yz
τ
zy
τ
zx
τ
xz
y
x
z。
材料力学第七章组合变形
P2=406N
外力向形心简化并分解 弯扭组合变形
每个外力分量对应 的内力方程和内力图
M (x)
M
2 y
(
x)M
2 z
(
x)
解续
MMZz ((NNmm)) 71.25
40.6
MMyy ((NNmm)) MT n ((NNmm))
7.05 120 Mn
+
MM ((NNmm)) Mmax=71.3
41.2
核心边界上的一个角点;
截面角点边界
核心边界上的一条直线;
截面曲线边界
核心边界上的一条曲线。
例:
求右图示矩形截面的截面核心。
解:取截面切线 l1作为中性轴,其截距:
b
az
b 2
ay
4
3
a
并注意到: iz2 Iz / A h2 /12 iy2 I y / A b2 /12
故
h
5 21 z
34
ay
iz2 yP
az
iy2 zP
当偏心外力作用在截面 形心周围一个小区域内, 而对应的中性轴与截面周 边相切或位于截面之外时, 整个横截面上就只有压应 力而无拉应力。
2.截面核心的性质及其确定
(1)性质:是截面的一种几何特征,它只与截面的形状、尺
寸有关,而与外力无关。
(2)确定:根据中性轴方程知,截面上中性轴上的点的坐标
cmax
B
Fp A
MB Wz
Fp 6M B 13.4MPa bh bh2
在 B 截面右边缘处
3、最大拉应力
t
max
Fp A
MB Wz
3.4MPa
4、最大剪应力
材料力学第07章应力状态与应变状态分析
以上由单元体公式
应力圆(原变换)
下面寻求: 由应力圆
单元体公式(逆变换)
只有这样,应力圆才能与公式等价
换句话,单元体与应力圆是否有一一对应关系?
为什么说有这种对应关系?
DE R sin[180o ( 2 20 )] R sin( 2 20 )
( R cos 20 ) sin 2 ( R cos 20 )cos 2
2
cos2
xy
sin 2
同理:
x
y
2
sin 2
xy
cos2
n
Ox
图2
二、极值应力
令:d
d
0
x
y
sin202 xycos200
由此得两个驻点:
01、(
01
2
)和两个极值:
tg20
2 xy x
y
y
mm
ax in
x
y ±(x
2
y
2
)2
2 xy
0 0极值正应力就是主应力 !
y
O
x
七、主单元体、主平面、主应力:
y
y
主单元体(Principal bidy):
x
各侧面上剪应力均为零的单元体。
z
z
2
3
主平面(Principal Plane):
剪应力为零的截面。 x
主应力(Principal Stress ):
主平面上的正应力。
1
主应力排列规定:按代数值大小,
1 2 3
三向应力状态( Three—Dimensional State of Stress): 三个主应力都不为零的应力状态。
A
材料力学 第七章 应力状态和强度理论
y
2
2 xy
tan 2a0
2 xy x
y
max
1
2
3
主应力符号与规定: 1 2 3 (按代数值)
§7-3 空间应力状态
与任一截面相对应 的点,或位于应力 圆上,或位于由应 力圆所构成的阴影 区域内
max 1 min 3
max
1
3
2
最大切应力位于与 1 及 3 均成45的截面上
针转为正,顺时针转为负。
tg 2a 0
2 x x
y
在主值区间,2a0有两个解,与此对应的a0也有两个解,其中落
在剪应力箭头所指象限内的解为真解,另一解舍掉。
三、应力圆
由解析法知,任意斜截面的应力为
a
x y
2
a x
x
y
2
y cos2a
2
sin 2a x c
x s os2a
in
2a
广义胡克定律
1、基本变形时的胡克定律
1)轴向拉压胡克定律
x E x
横向变形
y
x
x
E
2)纯剪切胡克定律
G
y
x x
2、三向应力状态的广义胡克定律-叠加法
2
2
1
1
3
3
1
1
E
2
E
3
E
1
1 E
1
2
3
同理
2
1 E
2
3
1
广义胡克定律
3
1 E
3
1
2
7-5, 7-6
§7-4 材料的破坏形式
⒈ 上述公式中各项均为代数量,应用公式解题时,首先应写清已 知条件。
材料力学第七章
若应力状态由主应力表示,并且在max 0 和 min 0 的情况下,则式(7-7) 成为
max min
max
min
2
1 3
2
进一步讨论,由式(7-4)和式(7-6)可知
tan
21
1 tan 20
上式表明1 与 0 之间有如下关系:
1
0
4
可见,切应力取得极值的平面与主平面之间的夹角为 45 。
若三个主应力中,只有一个主应力不等于零,这样的应力状态称为 单向应力状态。若三个主应力中有两个不等于零,称为二向应力状态或 平面应力状态。若三个主应力皆不为零,称为三向应力状态或空间应力 状态。
第二节 平面应力状态分析——解析法
一、斜截面上的应力
图 7-1 所示为平面应力状态的最一般情况。已知 x , y , xy 和 yx 。现 在研究图中虚线所示任一斜截面上的应力,设截面上外法向 n 与 x 轴的夹角 为 。
令 d /d 0 ,由式(7-1)可得
x
2
y
sin
2
xy
cos 2
0
解得
(7-3)
tan 20
2 xy x y
通过运算,可以得到斜截面上正应力的极值为
(7-4)
max min
x
y 2
x
2
y
2
2 xy
(7-5)
由式(7-4)可知, 取得极值的角0 有两个,二者相差 90 ,即最大正应 力 max 和最小正应力 min ,二者分别作用在两个相互垂直的截面上。当 0 , 取得极值时,该斜截面上的切应力 0 ,即正应力就是主应力。
(a)
(b) 图7-6
例 7-4 悬臂梁受力如图 7-7(a)所示。试求截面 n n 上 A 点处的主应力 大小和方向,并按主平面画出单元体。
材料力学-第七章-强度理论

r1 = max= 1 [] 其次确定主应力
ma xx 2y 1 2 xy2 4x 2y 2.2 9 M 8 P
m inx 2y 1 2 xy2 4x 2y 3 .7M 2 P
1=29.28MPa,2=3.72MPa, 3=0
r113M 0 Pa
根据常温静力拉伸和压缩试验,已建立起单向应力状态下的弹 性失效准则;
考虑安全系数后,其强度条件
根据薄壁圆筒扭转实验,可建立起纯剪应力状态下的弹性失 效准则;
考虑安全系数后,强度条件
建立常温静载复杂应力状态下的弹性失效准则: 强度理论的基本思想是:
确认引起材料失效存在共同的力学原因,提出关于这一 共同力学原因的假设;
像铸铁一类脆性材料均具有 bc bt 的性能,
可选择莫尔强度理论。
思考题:把经过冷却的钢质实心球体,放入沸腾的热油锅 中,将引起钢球的爆裂,试分析原因。
答:经过冷却的钢质实心球体,放入沸腾的热油锅中, 钢 球的外部因骤热而迅速膨胀,其内芯受拉且处于三向均 匀拉伸的应力状态因而发生脆性爆裂。
思考题: 水管在寒冬低温条件下,由于管内水结冰引起体 积膨胀,而导致水管爆裂。由作用反作用定律可知,水 管与冰块所受的压力相等,试问为什么冰不破裂,而水管 发生爆裂。
局限性:
1、未考虑 2 的影响,试验证实最大影响达15%。
2、不能解释三向均拉下可能发生断裂的现象, 此准则也称特雷斯卡(Tresca)屈服准则
4. 畸变能密度理论(第四强度理论) 材料发生塑性屈服的主要因素是 畸变能密度;
无论处于什么应力状态,只要危险点处畸变能密度达到 与材料性质有关的某一极限值,材料就发生屈服。
具有屈服极限 s
铸铁拉伸破坏
材料力学第七章知识点总结
规律,确定出最大应力,从而全面考虑构件破坏的原因,建 立适当的强度条件。
材料力学
3、一点的应力状态的描述
研究一点的应力状态,可对一个 包围该点的微小正六面体——单 元体进行分析
在单元体各面上标上应力 各边边长 dx , dy , dz
——应力单元体
三、几个对应关系
点面对应——应力圆上某一点的坐标值对应着单元体某一截面
上的正应力和切应力;
y
σy
n
τ
H (σα ,τα )
τ yxHτ xy来自αxσx
(σy ,Dτyx)
2α A (σx ,τxy)
c
σ
σx +σ y
2
转向对应——半径旋转方向与截面法线的旋转方向一致; 二倍角对应——半径转过的角度是截面法线旋转角度的两倍。
α =α0
=
−2⎢⎡σ x
⎣
−σ y
2
sin 2α0
+τ xy
cos
2α
0
⎤ ⎥
⎦
=0
=
−2τ α 0
τα0 = 0
tg
2α 0
=
− 2τ xy σx −σ y
可以确定出两个相互垂直的平面——主平面,分别为
最大正应力和最小正应力所在平面。
主平面的方位
(α0 ; α0′ = α0 ± 900 )
主应力的大小
材料力学
四、在应力圆上标出极值应力
τ
τ max
x
R
O σ min
2α12α0A(σx ,τxy)
c
σ
σ
max
(σy ,τyx) D
《材料力学》第七章
h
6
为什么要研究一点的应力状态?
1. 判断受力构件上哪一点、沿哪个方向的应力最大?哪个 点、哪个方向最危险?从而解决构件在复杂应力状态下的强 度计算提供条件,解决其强度问题。
2.解释变形构件的变形现象和破坏原因。
3.在弹性力学、塑性力学和断裂力学等学科的研究中都要广 泛用到应力状态理论。
要研究一点的应力状态,
σx
应力所在平面的法线方
向的方向,即其方向
σx
τxy
应力的方向
τxy
应力所在平面的法线方向
应力的符号规定为:
正应力以拉应力为正、压应力为负;切应力对单元体内
任意点的矩顺时针转向时为正;反之为负。
h
16
一、斜截面上的应力
设σx 、σy、τxy和τyx已知,取任意斜截面ef的方位角α>0, 用截面法求ef面上的正应力σα和切应力τα。
有正应力,又有切应力。
FN A
原始单元体
求出
h
任一单元体
coos 2
1 2
sin2
8
又如矩形截面悬臂梁,在梁上边缘A、B、C点处截 取单元体,其原始单元体如图:
My Iz
FSS* I zb
应该指出:
1.认为单元体各面上的应力
均匀分布;
m二原始单元体如在m点周围按图c的方式截取单元体使其和纸面垂直的四个侧面既丌不杆件轴线平行又丌不轴线垂直均为杆件的斜截面则四个侧面上既有正应力又有切应力
第七章 应力和应变分析 强度理论
h
1
基本要求: 1.熟悉应力状态的概念; 2.掌握用解析法和图解法计算二向应力状态下斜截面的应力、主 应力及最大最小切应力; 3.了解三向应力状态,会计算最大切应力; 4.了解广义胡克定律; 5.会应用四种强度理论进行复杂应力状态下构件的强度计算。
材料力学第七章
§7-2
平面应力状态分析
一、平面应力状态分析的解析法 1.平面应力状态图示(一般表现形式):
sy sx sy txy sx sx tyx sx txy sy
tyx
平面应力状态一般表现为:单元体有一对侧面应力 为零,其它四个侧面的应力都平行于该侧面。 (也可能是单向应力状态,需具体计算分析)
用法线平行的轴表示面,如x面为法线平行于 x轴的面;
§7-1
一点的应力状态
二、研究应力状态的方法 2.单元体上的应力分量: 2)各面应力分量共有九个,独立分量有六个; 切应力互等定理:t yz t zy,t zx t xz,t xy t yx
s 11 s 12 s 13 s x t xy t xz 3)应力矩阵: s ij s 21 s 22 s 23 t yx s y t yz t t s s 31 s 32 s 33 zx zy z 3.截取单元体的方法、原则: 用三个坐标轴(笛卡尔或极坐标)在一点截取, 因其微小,统一看成微小长方体; 各个面上的应力已知或可求;
t' s x s y s 's " 2 t xy 2)极值切应力: t '' 2 2
3)极值切应力与主应力方位的关系: 1 —极值切应力平面与 tan 2a 0 主平面成45o tan 2a1
2
§7-2 一、平面应力状态分析的解析法 5.主应力迹线:
§7-2
平面应力状态分析
总
结
任一斜截面上的应力 s x s y s x s y cos 2a t xy sin 2a s a 2 2 s x s y t a sin 2a t xy cos 2a 2 主应力,主平面方位
材料力学第7章

积分一次: Fb 2 EIw1 x C1 2l 积分二次: Fb 3 EIw1 x C1 x D1 6l
11
CB段(a x l): 弯矩方程:
Fb M 2 x x F x a l
挠曲线近似微分方程:
Fb EIw2 x F x a l Fb 2 F 2 x x a C2 积分一次: EIw2 2l 2
ቤተ መጻሕፍቲ ባይዱ 1 x 0
Fab l b , B 2 6lEI
Fab l a B = 6lEI
Fl 3 Fl 3 Fl 3 2 EI 6 EI 3EI
7
wmax w x l
例题7.2:图示弯曲刚度为EI的简支梁,受集度为q的均布 荷载作用,试求梁的挠曲线方程和转角方程,并确定其最 大挠度和最大转角。 解:由平衡方程得支座反力 ql FA FB 2 建立坐标系,得梁的弯矩方程为 1 1 2 M x qlx qx 2 2 梁挠曲线近似微分方程
1 3 C ql , D 0 24
9
梁的转角方程
q w (4 x3 6lx 2 l 3 ) 24 EI
梁的挠曲线方程
(5)
qx w ( x3 2lx 2 l 3 ) 24 EI
最大转角
(6)
max
ql 3 A B 24 EI
2
最大挠度
M ( x) F l x
1
挠曲线近似微分方程
EIw M x F l x 2 两次积分,得 1 2 EIw Flx Fx C 2 1 1 3 2 EIw Flx Fx Cx D 2 6
材料力学第七章 弯曲变形

1.叠加原理 各载荷同时作用下梁任一截面的挠度和转角
等于各个 载荷单独作用时同一截面挠度和转角 的代数和。
2.叠加原理的前提 小变形 材料是线弹性材料
例1:求大梁跨度中点的挠度 F
q
A
c
B
l
l
F
2
2
q
A
c
B+ A
c
B
l
l
l
l
2
2
2
2
(wc )F
Fl 3 48 EI
(wc )q
5ql 4 384 EI
dx
o
三、弯曲刚度条件
x
w
w f (x) 挠曲线
| w |max [w], | |max [ ]
§7.2 挠曲线的近似微分方程
| ds | | d | (a)
纯弯曲时挠曲线曲率与弯矩的关系为 1 M (b)
EI
横力弯曲时, 剪力对梁弯曲变形很小,可忽略不计。此时曲率与 弯矩为x的函数 。它们的关系仍满足(b)式。
EI2 EIw2' C2 EIw2 C2 x D2
确定积分常数
边界条件 x 0,1 0 w1 0
连续条件 x a,1 2 w1 w2
求得自由端转角和挠度为
C1 0 C2 ma
D1 0
D2
1 2
ma2
B
2
|xl
ma EI
fB
w2
|xl
ma (l EI
a) 2
§7.4 用叠加法求弯曲变形
由(a)(b)可得 d M (c)
ds EI
y
d
由于挠度很小,挠曲线非常平
坦,ds dx,并考虑到符号(c)可
材料力学第七章
x y
2
cos 2 x sin 2
x y
2
sin 2 x cos 2
补充例 题1
T
图示圆轴中,已知:圆轴直径d=100mm, 轴向拉 力F=500kN,外力矩Me=7kN· m。 求C点 =30°截面上的应力。
y T
y
F x
F
C
x
第7章
应力状态和强度理论
§7-1 概 述
低 碳 钢 拉 伸 试 验
铸 铁 拉 伸 试 验
低 碳 钢 扭 转 试 验
铸 铁 扭 转 试 验
1、一点处的应力状态
构件内一点处各截面方向上的应力的情况,称 为该点的应力状态。可由围绕该点的一个单元体面 上的应力表示。
目的:通过应力状态分析求出该点处的 max 、 max 及 其作用面,从而更好地进行强度分析。
30
在二向应力状态下,任意两个垂直面上,其σ的和为一常数。
分析轴向拉伸杆件的最大切应力的作用面,说 补充例 明低碳钢拉伸时发生屈服的主要原因。 题3
低碳钢拉伸时,其上任意一点都是单向应力状态。
x
x y
2
x y
2
cos 2 x sin 2
x
单元体如何取? 在研究点的周围,取一个由三对互相垂直的平 面构成的六面体,该六面体的边长分别为无穷小量 dx、dy和dz,如下图所示。
y
dz dx dy x
z
单元体每个面上应力均布;每对相互平行面上的 性质相同的应力大小相等;可用截面法求任一截面上 的应力。
根据单元体的局部平衡:
y
n
y
材料力学第七章 梁的变形
EIy1=-Fx13/9+ 5Fa2x1/9 EIy2=-Fx23/9+F(x2-a )3/6+ 5Fa2x2/9
(0≤x1 ≤a)
( a ≤x2 ≤3a )
7. 求ymax , θmax
x 0,
max
A
5Fa2 9EI
()
x 1.367a,
ymax
0.4838 Fa3 EI
21
F
A
C
在如图所示的座标系下,顺时针转为正,反之为负。
转角方程 θ = θ(x)
平行于轴线方向的线位移忽略
7
挠度与转角的关系:
θ θ’
y
x y
小变形
θ =θ ′
tgθ ′ ≈ θ ′ = y′
y dy
dx
x
8
§7-2 直梁挠曲线近似微分方程
一、挠曲线近似微分方程
纯弯曲 k 1 M
EIz
(x)
F C yCF
42
例题4
怎样用叠加法确定C 和 yC ?
q
A
B
C
yC
l
l
C
2
2
43
A
B
l 2
q
C
yC
l
C
2
A
l 2
A
l 2
q
B
l 2
q
B
l 2
A
q
l
B
l
2
2
44
简单静不定梁(超静定梁)
一、静定梁
F Fl
A
B
C
l
l
2
2
qa
A
B
C
a
a
45
材料力学第七章应力应变分析

x
y
2
x
2
y
cos 2
xy sin 2
x
y
2
sin 2
xy cos 2
1、最大正应力的方位
令
d d
2[
x
y sin 2
2
xy cos 2 ] 0
tg 2 0
2 xy x
y
0 0
90
0 和 0+90°确定两个互相垂直的平面,一个是最大正应 力所在的平面,另一个是最小正应力所在的平面.
的方位.
m
m a
A
l
解: 把从A点处截取的单元体放大如图
x 70, y 0, xy 50
A
tan 20
2 xy x y
2 50 1.429
1
3
(70) 0
0
A
x
0
27.5 62.5
3
1
因为 x < y ,所以 0= 27.5° 与 min 对应
max min
x
2
y
(
x
2
y )2
三、应力状态的分类
1、空间应力状态
三个主应力1 、2 、3 均不等于零
2、平面应力状态
三个主应力1 、2 、3 中有两个不等于零
3、单向应力状态
三个主应力 1 、2 、3 中只有一个不等于零
2 3
2
1
1
1
1
1
3 2
2
1
例题 1 画出如图所示梁S截面的应力状态单元体.
F
5
S平面
4
3
l/2
2
l/2 1
任意一对平行平面上的应力相等
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
求 A 点转角
动脑又动笔
3qa2 A EI a a
利用已有结果计算:
qa3 θA = , 3EI
qa3 , 4EI
qa3 , 6EI
qa3 8EI
求 A 点转角 例 求图示自由端的挠度.
θ
a 2 A F a 2 B w2 w1
F a Fa3 w = w( A) = = 1 3EI 2 24EI a a w2 = tanθ ( A) = θ(A) 2 2
x
w = w (x)
θ (x)
w (x)
挠度以 y 轴正向为正.
变形前位置
转角 ( slope )
转角以 x 轴正向逆时针 旋转为正.
数学工具箱
7.1 弯曲变形的概念
1. 挠度与转角
y dw o x
变形后位置
dx
挠度 ( deflection )
x
w = w (x)
θ (x)
w (x)
挠度以 y 轴正向为正.
EI P= LR EI x = L PR
EI LR
在 C 处 MC = 1 EI R
MC = P(L x)
3. 挠度微分方程
M = ρ EI 1 M w′′ =± EI (1+ w′2 )3 2
o
y
θ (x)
w (x) x x
曲率的符号规定与弯矩相同.
w′ < 1 1+ w′2 =1 < &
重要公式
P P
P
P
L EI R L EI x C R
P
例 当 P 至少为多大时,才可能使梁的 根部与圆柱表面产生贴合? 当 P 足够 大,使梁己经与圆柱面贴合,试根据 P 决定贴合的长度.
P
至少应使梁根部挠曲线的曲率半径 与 R 相同,才可能产生贴合.
M 1 1 = = EI ρ R
若 P>
M = PL
PL 1 = EI R
转角 ( slope ) 注意 在梁的弯曲变形中,
梁轴线各点的轴向位移比横 向位移(挠度)要小很多, 因此一般不予考虑.
转角以 x 轴正向逆时针 旋转为正.
2. 中性层曲率与弯矩的关系
M = ρ EI 1
可以利用这个式子判断挠度曲线的 大致形状.
数学工具箱
曲率计算公式
y′′ =± ρ (1+ y′2 )3 2 1
第七章 弯曲变形
Chapter Seven
Deflection of Beams
背景材料 本章基本要求 7.1 7.2 7.3 7.4 弯曲变形的概念 积分法求梁的变形 叠加法计算梁的挠度和转角 简单超静定梁
本章内容小结
背 景 材 料
零件变形过大将使加工精度受到影响.
机架变形过大 将使加工无法正常 进行.
挠度
边界条件 θ (0) = 0
C =0
w(0) = 0
D=0
qx2 2 (x 4Lx + 6L2 ) w(x) = 24EI
适于用积分法求梁的挠度曲线的情况
1) 单个梁
q q
非单梁的挠度曲线方程应分段建立. 2) 等截面梁
q EI 2EI q EI
非等截面梁的挠度曲线方程应分段建立.
例 悬臂梁未加载时为微弯曲线.今有移动荷载 F 的作用, 若要使 F 力作用点始终保持在水平线上,求初始曲线方程. 微弯梁的挠度仍可按直梁计算.
y
y′′ > 0
y′′ < 0
当 y′′ > 0 时,曲线为凹形.
o x
当 y′′ < 0时,曲线为凸形.
2. 中性层曲率与弯矩的关系
M = ρ EI
q
1
可以利用这个式子判断挠度曲线的 大致形状.
M x
凸曲线
凹曲线
注意 判断挠度曲线的形状时应注意梁的约束条件.
分析和讨论
m L L m
哪一种挠度曲线是正确的?
F A EI a B Fa 2 C F
C 点的挠度,是由 AB 段
w1 w2 w1 w2
θ a/2 a/2
变形的影响和 BC 段变形的影 响共同构成的.
刚体 变形体
变形体 刚体
ml (Fa 2)a Fa2 θ = = = 3EI 3EI 6EI
F a Fa3 w2 = = 3EI 2 24EI
F L
w ((a ––)) θ a a
w ((a ++)) θ a
w(a ) = w(a+ )
挠度是光滑的:
θ (a ) = θ (a+ )
例 求图示梁的挠度曲线. 弯矩
y qL / 2 x qL
2
q x
1 1 M(x) = qL2 + qLx qx2 2 2
L
转角
q 1 2 1 2 1 3 θ(x) = L x + Lx x + C 2 6 EI 2 q 1 2 2 1 3 1 4 w(x) = L x + Lx qx + Cx + D EI 4 6 24
刚体 变形体
(↓)
Fa3 v1 = EI
v′ d 2 < <1 = 2 v1 16a
分析和讨论
竖梁压缩量 两者之比
竖梁压缩对 A 端竖向位移的贡献有多大? 竖梁弯曲的贡献 以圆杆为例
Fa ′= v EA
v′ I = 2 v1 Aa
注意:在刚架中,由构件轴向拉压所引起的变形量往往比弯 注意:
曲所引起的变形量小很多,因此一般可以忽略不计.
m(a 2) ma2 w2 = = 2EI 8EI
7ma2 w = w + w2 = (↑) 1 24EI
例 求图示结构中 A 点的竖向位移. 求图示结构中
L EA L EI L EI P A
例 求图示结构中 A 点的竖向位移. 求图示结构中
L EA P L EI P P L EI P u1 A w1
4 3
θ
L 2 B L 2
w3 w2
L q0 (L 2) L q0 L4 w3 =θB = = 2 6EI 2 96EI
41q0 L4 wA = w + w2 + w3 = (↓) 1 384EI
2. 逐段刚化法
依据: 若结构可分为若干部份,且各部份在荷载作用下的 依据: 变形不是相互独立的,那么,结构中 A 点的位移是各个部 份在这一荷载作用下的变形在 A 点所引起的位移的叠加.
有的情况下应 该防止构件产生过 大的变形,有的情 况下则可以利用构 件的变形.
本 章 基 本 要 求
能正确应用积分法求梁的挠度曲线函数. 能正确熟练地利用叠加法计算梁中指定截面的 广义位移. 掌握弯曲超静定问题的分析方法.
7.1 弯曲变形的概念
1. 挠度与转角
y dw o x
变形后位置
dx
挠度 ( deflection )
变形前位置
转角 ( slope ) 注意 在弹性范围内,梁的
挠度曲线必定是连续光滑的 曲线.
转角以 x 轴正向逆时针 旋转为正.
7.1 弯曲变形的概念
1. 挠度与转角
y dw o x
变形后位置
dx
挠度 ( deflection )
x
w = w (x)
θ (x)
w (x)
挠度以 y 轴正向为正.
变形前位置
3
a Fa3 w =θ = 1 2 12EI Fa3 wC = w + w2 = 1 8EI
(↓)
F
例 求图示 A 端的竖向位移.
vvA 2 1
θ EI
EI a
A
a
变形体 刚体
(Fa) a v1 = θa = a EI
4Fa3 vA = v1 + v2 = 3EI
Fa3 v2 = 3EI
m
结论是对的,公式 结论是对的,公式是错的. 公式是错的.
EI
公式是精确的,结论 公式是精确的,结论是近似的. 结论是近似的.
1
ρ
=
M EI
结论是精确的,公式 结论是精确的,公式是近似的. 公式是近似的.
mx2 w= 2EI
如何把两者统一起来?
分析和讨论
对于如图的结构,有人认为,梁中弯矩处处相等,故挠度 曲线的曲率处处相等,故有结论 曲线的曲率处处相等,故有结论:挠度曲线为圆弧.但这一结 结论:挠度曲线为圆弧.但这一结 论与书上的公式 论与书上的公式不吻合.对于这种矛盾,正确的理解是: 公式不吻合.对于这种矛盾,正确的理解是:
F F F F F F y(x) x F w′ (x) x
设初始曲线方程为 y (x). F 作用而产生的挠度为
Fx3 w′(x) = 3EI 由题设
w(x) = y(x) + w′(x) ≡ 0
故有
Fx3 y(x) = 3EI
分析和讨论
q
哪一种挠度曲线是正确的?
a 2qa
a
分析和讨论
q
哪一种挠度曲线是正确的?
R m EI
1 M = R EI
( y R)
2
+ x2 = R2
2
w = y = R R2 x2 = R R 1 ( x R)
1 x 2 1 x 4 = R R1 L 2 高阶小量 R 8 R
1
ρ
=
M EI
2
mx w= 2EI
1 x 2 1 x 4 mx2 w = R + L = 2 R 8 R 2EI
q EI a A a/4 a/4
例 求如图外伸梁 A 点的竖向位移.
θ1
w1
θ2
w2
w3
q EI a A