MC2812硬件设计文档
CMDSPF2812电路使用说明书
中国电科第五十八研究所电路使用说明书产品型号: CMDSPF2812 产品名称: 32位定点数字信号处理器中国电科第五十八研究所一、 概述 (3)二、 功能、性能介绍 (3)三、 结构概况 (13)四、 外设 (45)五、 推荐使用环境 (74)版本修改说明修改人时间Rev.01 初始创建张猛华 2010.07.20一、 概述CMDSPF2812是高性能32位定点数字信号处理器,主时钟工作频率150MHz,单周期指令执行时间6.67ns。
该电路集成了多种先进的外设,为电机及其他运动控制领域应用的实现提供了良好的平台。
同时代码和指令与F24x系列数字信号处理器完全兼容,从而保证了项目或产品设计的可延续性。
CMDSPF2812数字信号处理器集成了256KB的Flash存储器,8KB的引导ROM,数字运算表以及2KB的OTP ROM,大大改善了应用的灵活性。
128位的密码保护机制有效地保护了产品的知识产权。
两个事件管理器模块为电机及功率变换控制提供了良好的控制功能。
16通道高性能12位ADC模数转换单元提供了两个采样保持电路,可以实现双通道信号同步采样。
CMDSPF2812使用先进TSMC 0.18微米 N阱 双多晶六层金属嵌入式Flash 工艺制造,正反向结合的设计方法完成设计,芯片最终面积为6705×6502 平方微米,设计规模达180万门。
二、功能、性能介绍2.1 功能概述2.2 CMDSPF2812主要技术特点2.3管脚及引脚说明2.1 功能概述CMDSPF2812是一种低功耗的32位定点数字信号处理器,它集中了了数字信号处理器的诸多优秀特性,它具备精简指令集计算(RISC)功能,微型控制器结构,固件及工具装置等。
数字信号处理器的特性包括改进型的哈佛结构和循环寻址方式等。
RISC特性是指单周期执行指令,寄存器到寄存器的操作以及改进型的哈佛结构(能够在冯诺依曼模式中可用)等等。
微型控制器结构则包括直观指令集操作简化、压缩和非压缩的字节应用以及的对位的操作等等。
SY-MCK2812低压驱动板程序调试使用说明书
SY-MCK2812低/高压电机驱动评估板软件调试说明书1. CC2000或者CCS3.1下测试程序的使用测试本公司MCK2812LV/HV评估板需要安装CCS2000 2.2以上版本的CCS环境由于本测试程序是在三意电机驱动技术公司的USB2.0仿真器基础上开发为了方便起见建议用户用三意的USB接口DSP仿真器如果使用其它类型的仿真器请参考有关资料正确确安装驱动MCK2812LV/HV评估板提供的测试程序分基于CCS3.1环境在CCS2.2环境下应该也可以用安装时需要设置CCS的相关信息产生流水冲突的警告以及驱动程序的安装等等关于这些的设置请参考三意公司仿真器使用说明书或者DSP用户板的使用说明书这里不做介绍另外需要说明的是由于电机驱动板上的功率部分属于易损坏部分为了避免造成不必要的损失请在使用中注意以下几点1由于功率部分和评估板进行了全隔离不可在功率部分和控制部分额外的连接导线2测试程序在CCS环境中运行后在程序人为停止以后需要重新运行时请先选择DEBUG菜单中的RESET CPU命令在选择RESTART命令后再重新运行程序避免由于程序跑飞或者程序在不正常状态下启动造成的不良后果3在使用我们公司评估板编制新的电机程序时务必注意您所使用的定时器的TxCON寄存器一定不能配置成当仿真器挂起时定时器继续运行的状态4在调试过程中尽量先脱离电机运行待确定程序基本无误后再接上电机连调5在启动ccs之前一定要先连接好仿真器将连接EVM2812和MCK2812的排线插牢如需接电机也要先将电机的先连接好后在给电源电源指示灯全部工作后在打开CCS运行程序2 测试程序1有刷直流电机的调速正反转测试有刷直流电机调速测试程序SY DC MOTOR将光盘上的SY DC MOTOR文件夹COPY到X:\TI\MYPROJECTS中在CCS2000/CCS3.1环境中打开SY DC MOTOR.pjt打开后如图所示测试程序1为驱动电流小于6A的有刷直流电机的演示程序其基本功能为实现有刷直流电机的正反转在运行程序前请确认连线是否正确注意电机输出可以任选U,V,W中的任意两个在运行CC C2000后进入CCS后在FILE菜单中选择LOAD program将SY DC MOTOR.out装载入板上内存也可直接LOAD PROJECT后编译输出注意此时MP/MC跳线处于MP状态在DEBUG菜单中选择RESET复位后选择RUN运行程序注意在仿真器中运行时当程序运行后且电机旋转过程中请在按程序停止按钮后迅速将DSP复位CCS中Debug菜单中的RESET否则可能引起电机和MOS管的过电流发热如上图所示在程序中// Enable compare for PWM1-PWM6EvaRegs.CMPR1 =0x2050;EvaRegs.CMPR2 = 0x2050;EvaRegs.CMPR3 = 0x8fff;这三句语句是修改PWM占空比可以起到直流有刷电机的调速作用和正反转EvaRegs.CMPRx的修改范围为0x100,到0x85ffEvaRegs.CMPR1对应J4端口的U相EvaRegs.CMPR2对应J4端口的V相EvaRegs.CMPR3对应J4端口的W相我们知道直流有刷电机运行只需要将电机的两相接入直流电源电机既可旋转当直流电源的电压升高电机转速加快直到电压升高到额定电压当接入电机的电源反接于电机上时电机就会反转这里以直流电机接入U,V两相为例当需要U相为电源V相为地时令EvaRegs.CMPR1=0x2050该值越低占空比大转速越快EvaRegs.CMPR2=0x85FF,该值对应的占空比为零即为电源地端通过修改CMPR1的值就可以调速将CMPR1和CMPR2的值相互对调就可以令电机反转3 测试程序2无刷直流电机的开环调速测试无刷直流电机的开环调速测试程序在CCS3.1环境中请打开SY BLDC.PRJ在CCS2000环境中请打开SY BLDC 2000.PRJ测试程序2为对电流小于6A的三相无刷直流电机速度调节的演示程序其基本功能是通过unsigned int PWM_DUTY=pwm_half_per/2;语句的修改调整6路pwm占空比来调节电机转速在运行程序前请确认连线是否正确注意三相电机输出不可接反霍尔输入信号J5不可接反在运行CC C2000/CCS3.1后进入CCS后在FILE菜单中选择LOADprogram将SY DC MOTOR.out装载入板上内存也可直接LOADPROJECT后编译输出注意此时MP/MC跳线处于MP状态在DEBUG菜单中选择RESET复位后选择RUN运行程序注意1在仿真器中运行时当程序运行后且电机旋转过程中请在按程序停止按钮后迅速断电然后重新上电重新装载程序避免由于DSP寄存器被修改及原来驻留在内存中的变量引起的错误避免可能引起电机和驱动管的过电流极发热如下图所示unsigned int PWM_DUTY=pwm_half_per/2为PWM占空比调节可用于电机的转速调节.可以通过PWM_DUTY=pwm_half_per/n;其中这个n对应的相应的转速调节n越小转速越快,n越大转速越慢N=2,占空比为1半但对应的未必是额定转速的一半这由电机与ipm中的igbt的开度有关也可以修改dir=0;为dir=1;改变转向,修改图中黑圈处。
第2课 F2812系统结构

BGA封装的F2812
179引脚GHH球形网格阵列BGA(Ball Grid Array)
11
BGA封装的机械尺寸
12
贴片封装的F2812
176引脚LQFP封装顶视图
128引脚PBK封装顶视图
13
贴片封装的机械尺寸
14
F2812电源
2812采用了高性能的静态CMOS技术,时钟 频率可达150MHZ(6.67ns),其核心电压 为1.8V,I/O口电压3.3V,Flash编程电压也 为3.3V。 在设计2812电源部分的时候,需要将常用 的5V电压转换成1.8V和3.3V的电压之后, 才能供给2812。
8
TMS320F2812的主要特点
4) 片上存储器 --有多达128K×16的FLASH存储器 (4个8K×16和 6个16K×16) --有多达128K×16的ROM 5)外部存储器接口 --有多达1MB的寻址空间 --三个独立的片选端 6)时钟与系统控制 --支持动态的改变锁相环(PLL)的频率 --片上振荡器 7)三个外部中断 8)外部中断扩展(PIE)模块,支持45外部中 断
MUX
Data Memory
XAR31-16
XAR15-0
=AR7-0
28
C28x Pipeline
A F1 F2 D1 D2 R1 R2 B C D E F G H
F1: 取指令地址 F2: 取指令内容 D1: 32/16判断边界 D2: 取指译码 R1: 操作数地址 R2: 取操作数 E: 指令执行 W: 写内容回存储单元
Program Bus
32-bit 定点DSP
32 x 32 bit MAC
2次单周期16 x 16 MAC (DMAC) 快速中断响应机制 单周期读、写、修改指令
2812信号引脚详解
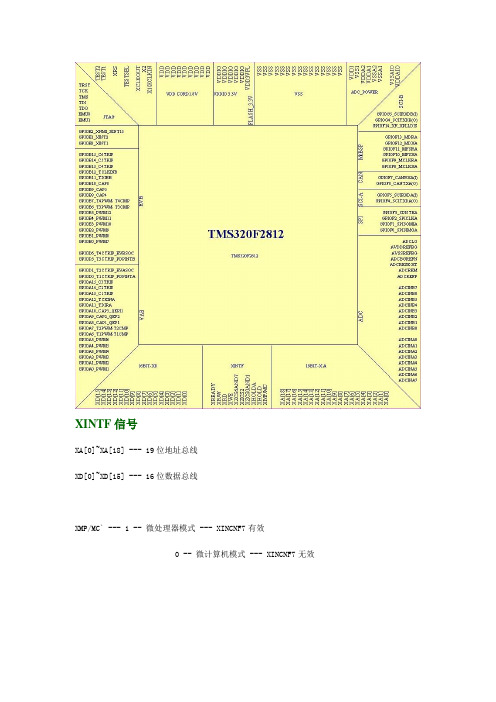
XINTF信号XA[0]~XA[18] --- 19位地址总线XD[0]~XD[15] --- 16位数据总线XMP/MC` --- 1 -- 微处理器模式 --- XINCNF7有效0 -- 微计算机模式 --- XINCNF7无效XHOLD` --- 外部DMA保持请求信号。
XHOLD为低电平时请求XINTF释放外部总线,并把所有的总线与选通端置为高阻态。
当对总线的操作完成且没有即将对XINTF进行访问时,XINTF释放总线。
此信号是异步输入并与XTIMCLK同步XHOLDA` --- 外部DMA保持确认信号。
当XINTF响应XHOLD的请求时XHOLDA呈低电平,所有的XINTF总线和选通端呈高阻态。
XHOLD和XHOLDA信号同时发出。
当XHOLDA有效(低)时外部器件只能使用外部总线XZCS0AND1` --- XINTF区域O和区域1的片选,当访XINTF区域0或1时有效(低)XZCS2` --- XINTF区域2的片选,当访XINTF区域2时有效(低)XZCS6AND7` --- XINTF区域6和区域7的片选,当访XINTF区域6或7时有效(低)XWE` --- 写有效。
有效时为低电平。
写选通信号是每个区域操作的基础,由XTIMINGX寄存器的前一周期、当前周期和后一周期的值确定XRD` --- 读有效。
低电平读选通。
读选通信号是每个区域操作的基础,由xTIMINGX寄存器的前一周期、当前周期和后一周期的值确定。
注意:XRD`和XWE`是互斥信号XR/W` --- 通常为高电平,当为低电平时表示处于写周期,当为高电平时表示处于读周期XREADY --- 数据准备输入,被置1表示外设已为访问做好准备。
XREADY可被设置为同步或异步输入。
在同步模式中,XINTF接口块在当前周期结束之前的一个XTIMCLK时钟周期内要求XREAD Y有效。
在异步模式中,在当前的周期结束前XINTF接口块以XTIMCLK的周期作为周期对XREAD Y采样3次。
2812DSP实验指导书
实验指导书数字信号处理E300型教学实验系统Tech_v F2812漆为民、何立言、于军目录第一章实验系统介绍 (3)1.1 EL-DSP-E300型DSP实验系统介绍 (3)1.2 Techv_2812CPU板介绍 (13)第二章调试软件安装说明 ...................................................................... 错误!未定义书签。
2.1 CCS的简介 ............................................ 错误!未定义书签。
2.2 CCS3.1软件的安装 ..................................... 错误!未定义书签。
3.3 CCS3.1软件的设置(以F2812为例) ..................... 错误!未定义书签。
第三章硬件安装说明 .............................................................................. 错误!未定义书签。
3.1 DSP硬件仿真器的安装 .................................. 错误!未定义书签。
3.2 DSP硬件仿真器的使用 .................................. 错误!未定义书签。
E300样例实验说明 ..................................................................................... 错误!未定义书签。
第四章常规实验指导 ................................................................................ 错误!未定义书签。
DSP2812开发板说明书

CANL 1 2 CANH
11.2812开发板的中断
F2812有3个中断引脚:XINT1,XINT2和XNMI_INT13,每个中断可配置为上升沿或下降沿触 发,也可以被使能或禁止。
开发板板上有8个外部中断源:
EXINT[1..4] 外部扩展总线可屏蔽的中断源
EXNMI[1..2] 外部扩展总线不可屏蔽的中断源
第三章 TMS320F2812的基本系统
1. 时钟电路
开发板用30MHz外部晶体给DSP提供时钟,并使能F2812 片上PLL电路。PLL倍频系数由PLL 控制寄存器PLLCR的低4位控制,可由软件动态的修改。外部复位信号(RS)可将此4位清零(CCS 中的复位命令将不能对这4位清零)。TMS320F2812的CPU最高可工作在150M的主频下,也即是 对30M输入频率进行5倍频。
TMS320F2812的外部存储器接口包括:19位地址线,16位数据线,3个片选控制线及读 写控制线。这3个片选线映射到5个存储区域,Zone0,Zone1,Zone2,Zone6和Zone7。其中, Zone0和Zone1共用1个片选线XCS0AND1,Zone6和Zone7共用1个片选线XCS6AND7。这5个存 储区域可分别设置不同的等待周期。
7. McBSP
开发板上有一个多通道缓冲型同步串口McBSP,在板上与AIC23的同步串口相连接。
8. SPI
开发板上有一个SPI同步串口,在板上与74HC595相连接。
9. SCI
开发板上有两个SCI异步串口,经485和232电平转换芯片连接到485CON和232CON,供外部使用。
10.CAN
开发板上有一个增强型的CAN总线控制器,符合CAN2.0B接口规范,经CAN收发器驱动后连接到 CANCON,提供外部使用。CANCON连接器定义如下:
TIDSP2812中文手册
第1章芯片结构及性能概述TMS320C2000系列是美国TI公司推出的最佳测控应用的定点DSP芯片,其主流产品分为四个系列:C20x、C24x、C27x和C28x。
C20x可用于通信设备、数字相机、嵌入式家电设备等;C24x主要用于数字马达控制、电机控制、工业自动化、电力转换系统等。
近年来,TI公司又推出了具有更高性能的改进型C27x和C28x系列芯片,进一步增强了芯片的接口能力和嵌入功能,从而拓宽了数字信号处理器的应用领域。
TMS320C28x系列是TI公司最新推出的DSP芯片,是目前国际市场上最先进、功能最强大的32位定点DSP芯片。
它既具有数字信号处理能力,又具有强大的事件管理能力和嵌入式控制功能,特别适用于有大批量数据处理的测控场合,如工业自动化控制、电力电子技术应用、智能化仪器仪表及电机、马达伺服控制系统等。
本章将介绍TMS320C28x 系列芯片的结构、性能及特点,并给出该系列芯片的引脚分布及引脚功能。
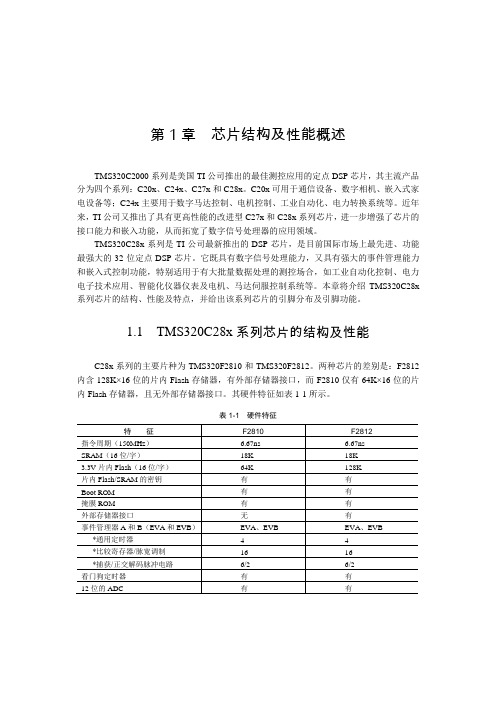
1.1 TMS320C28x系列芯片的结构及性能C28x系列的主要片种为TMS320F2810和TMS320F2812。
两种芯片的差别是:F2812内含128K×16位的片内Flash存储器,有外部存储器接口,而F2810仅有64K×16位的片内Flash存储器,且无外部存储器接口。
其硬件特征如表1-1所示。
表1-1 硬件特征TMS320C28x系列DSP的CPU与外设(上)·2·注:‡“S”是温度选择(-40℃~ +125℃)的特征化数据,仅对TMS是适用的。
‡‡产品预览(PP):在开发阶段的形成和设计中与产品有关的信息,特征数据和其他规格是设计的目标。
TI保留了正确的东西,更换或者终止了一些没有注意到的产品。
高级信息(AI):在开发阶段的取样和试制中与新产品有关的信息,特征数据和其他规格用以改变那些没有注意到的东西。
产品数据(PD):是当前公布的数据信息,产品遵守TI的每项标准保修规格,但产品加工不包括对所有参数的测试。
一种高性能可视化运动控制开发平台——MCK2812
新 的双通道 1 2位 串行 D A转 换 器 ,它 可 用 于 性 能 评 估 或 是 /
M K 8 2板 的 调试 。 S 21
T 3 0 2 1 该 处 理 器 是 目前 市 场 中 功 D P芯 片 。 本 文 将 详 细 介 绍 瑞 士 T c n s E公 司最 新 推 S e ho o 出的 MCK 8 2可 视 化 运 动 控 制 开 发平 台 。 21
Ab ta t s rc
Ths i pa per nr du s a dwar acht t e ito ce h r e r i ur an vs al ot e ec d iu s fwar pltom —M CW I af r N281 of 2 mo in on r kt. CK2 2 to c tol i M — 81 whc T hn s  ̄ c m pa y e ih ec o o o n n wes p o oesan f t r m t , d u ̄h r s us s s is f e dic se a er o DSP x e e per i mens t ba ed n hi ktW e an s o t s i . c
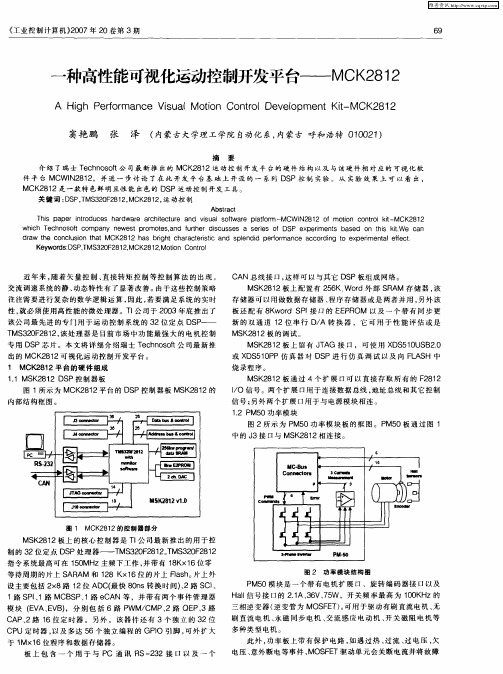
图 1 示 为 MCK 8 2平 台 的 D P控 制 器 板 MS 2 1 所 21 S K 8 2的
内 部 结 构框 图 。
图 1 MCK 81 2 2的 控 制 器 部分
MS 2 1 K 8 2板 上 的核 心 控 制 器 是 T 公 司 最 新 推 出 的用 于控 I
Key wor : dsDSPTM S 0 81 32 F2 2 MCK2 2. i n r 81 Mot on Co tol
DSPTMS320F2812实验讲义

目次第一章 (2)1.1 系统概述 (2)1.2 实验箱整体配置与特点 (2)1.3 实验箱功能实现 (4)第二章 (5)2.1 电源设计 (5)2.2 复位电路设计 (7)2.3 时钟电路设计 (9)第三章 (11)3.1 硬件仿真器的安装 (11)3.2 CCS软件设置与项目管理 (18)3.3 CCS常用工具与窗口 (33)第四章 (40)4.1 CCS入门实验(C语言的使用) (40)4.2 片上外设实验----定时器控制实验 (43)4.3 片上外设实验----A/D采集实验 (47)4.4 有限冲击响应滤波器(FIR)算法实验 (54)4.5 快速傅立叶变换(FFT)算法实验 (60)附录 (65)定时器工作寄存器 (67)AD转换功能寄存器 (70)第一章实验系统介绍1.1系统概述SEED-DTK(DSP Teaching Kit)是由合众达公司提供的一套可以满足大学本科、研究生和教师科研工作的综合实验设备,具有独特的多DSP结构、较强的DSP主板功能、丰富的外围实验电路、与教学内容紧密结合的实验例程。
下面主要介绍下SEED-DTK2812实验箱,它由SEED-DEC2812板卡以及SEED-DTK_MBoard构成:其中主控板是合众达公司生产的SEED-DEC2812,母板是由该公司生产的SEED-DTK_MBoard板卡。
此外,该款实验箱还可以配置DSK板卡、图像处理卡等多种子卡。
1.1.1 SEED-DTK2812实验箱实验例程■ SEED_DEC2812板卡实验例程S软件应用实验:介绍CCS的使用,编写简单的实验例程。
2.DSP片上资源应用实验本部分例程介绍的是DSP的片上资源。
3.SEED_DEC2812板卡应用实验SEED_DEC2812板卡与实验箱资源的应用实验。
包括:异步、同步串口通讯;扩展I/O口使用;AD/DA的使用。
4.算法实验包括FFT,滤波(FIR、IIR),卷积,自适应滤波器算法实验5.参考实验包括USB使用实验、自举程序的编写以及SEED_DEC2812板卡与SEED-DTK_MBoard板卡之间数据传递实验。
DSP(2812)最小系统设计
摘要本设计是DSP(2812)最小系统设计,DSP是一门涉及许多学科而又广泛应用于许多领域的新兴学科。
DSP指的是数字信号处理器。
数字信号处理器是一种适合完成数字信号处理运算的处理器。
20世纪60年代以来,随着计算机和信息技术的飞速发展,DSP技术应运而生并得到迅速的发展。
在过去的二十多年时间里,数字信号处理已经在通信等领域得到极为广泛的应用。
数字信号处理是利用计算机或专用处理设备,以数字形式对信号进行采集,变换,滤波,固执,增强,压缩,识别等处理,已得到符合人们需要的信号形式。
数字信号处理是以众多科学为理论基础的,它所涉及的范围及其广泛。
在科学领域,微积分,概率统计,随机过程,数值分析等都是数字信号处理的基本工具。
与网络理论,信号与系统,控制论,通信理论,故障诊断等也密切相关,可以说,数字信号处理是把许多经典的理论体系作为自己的理论基础,同时又使自己成为一系列新兴学科的理论基础。
DSP主要应用在数字信号处理中,目的是为了能够满足实时信号处理的要求,因此需要将数字信号处理中的常用运算执行的尽可能快。
这就决定了DSP的特点和关键技术。
适合数字信号处理的技术:DSP包涵乘法器,累加器,特殊地址发生器,领开销循环等;提高处理速度的技术:流水线技术,并行处理技术,超常指令等。
DSP对元件值的容限不敏感,受温度、环境等外部参与影响小;容易实现集成;VLSI 可以时分复用,共享处理器;方便调整处理器的系数实现自适应滤波;可实现模拟处理不能实现的功能:线性相位、多抽样率处理、级联、易于存储等;可用于频率非常低的信号。
关键词典型特征,体系结构,程序流程IABSTRACTThis design is the DSP (2812) Minimum system design, DSP is a widely used but many disciplines involved in many areas of emerging disciplines. We often say that the DSP refers to the digital signal processor. Digital Signal Processor is a complete cross-signal processing for the processor. Since the 60s of the 20th century, with the computers and the rapid development of information technology, DSP technology and the rapid development emerged. In the past twenty years time, digital signal processing in communications and other fields has been very widely used.Digital signal processing is to use a computer or dedicated processing equipment to collect the signal in digital form, transform, filter, stubborn, enhancement, compression, recognition processing needs of the people has been the signal form. Digital signal processing theory is based on a number of science-based, its scope and wide. For example, in science, calculus, probability and statistics, stochastic processes, numerical analysis, digital signal processing are the basic tools. And network theory, signals and systems, control theory, communication theory, fault diagnosis, etc., are closely related, can be said that digital signal processing is to many classical theoretical system as its theoretical basis, but also to become a new discipline theoretical basis.DSP is mainly used in digital signal processing, designed to meet real-time signal processing requirements, requiring digital signal processing of common operations performed as quickly as possible. This determines the DSP features and key technologies. Suitable for digital signal processing techniques: DSP indulgence multiplier, accumulator, special address generator, leading overhead loops; improve the speed of the technology: pipelining, parallel processing, exceptional instruction and so on.DSP of the component value of tolerance is not sensitive to temperature, and environment outside involvement affect small; easy integration; VLSI can be IItime-division multiplexing, shared processor; facilitate the adjustment of the processor factor to achieve adaptive filter; to analog processing can not Implementation of functions: linear phase, multirate processing, cascade, easy storage; can be used to frequency of very low signal.KEY WORDS:Typical characteristics, Architecture, Program flowIII前言 (1)第1章绪论 (2)1.1 研究背景 (2)1.2 系统概述 (2)1.3 论文完成的工作 (3)第2章 DSP(2812)最小系统的硬件 (4)2.1 DSP(2812)性能概述 (4)2.2 TMS320F2812的引脚图及功能 (6)2.3 相关硬件设计 (12)2.3.1 DSP与液晶模块的直接访问接口 (12)2.3.2 基于CPLD的硬件等待电路 (13)2.4 DSP最小系统 (14)2.4.1 电源转换 (14)2.4.2片外程序和数据存储器 (14)2.4.3 时钟电路 (15)2.4.4 JTAG仿真接口电路 (15)2.5 硬件的调试 (16)2.5.1 电路测试及目标板识别 (16)2.5.2 事件管理器产生PWM波功能测试 (16)2.5.3 基于串口通信的数据采集功能测试 (16)第3章软件的设计 (18)3.1 软件简介 (18)3.2 基本功能 (18)3.2.1 2812读写时序 (18)3.2.2 液晶显示模块的读写时序 (19)3.2.3 F2812的XREADY信号 (20)3.2.4 相关VHDL (21)3.2.5 DSP对液晶模块连续的读写访问 (22)3.3 TMS320F2812 系统设计中应注意的几个问题 (23)3.3.1 速度和时钟 (23)3.3.2 中断的使用 (24)3.3.3 Flash Ram的使用 (26)第4章结论 (27)参考文献 (28)致谢 (30)IV随着计算机和信息技术的飞速发展,DSP技术已经应用到我们生活的每一个角落,从军用到民用,从航空航天到生产生活,都越来越多的使用DSP。
2812中文资料

第1章 芯片结构及性能概述TMS320C2000系列是美国TI公司推出的最佳测控应用的定点DSP芯片,其主流产品分为四个系列:C20x、C24x、C27x和C28x。
C20x可用于通信设备、数字相机、嵌入式家电设备等;C24x主要用于数字马达控制、电机控制、工业自动化、电力转换系统等。
近年来,TI公司又推出了具有更高性能的改进型C27x和C28x系列芯片,进一步增强了芯片的接口能力和嵌入功能,从而拓宽了数字信号处理器的应用领域。
TMS320C28x系列是TI公司最新推出的DSP芯片,是目前国际市场上最先进、功能最强大的32位定点DSP芯片。
它既具有数字信号处理能力,又具有强大的事件管理能力和嵌入式控制功能,特别适用于有大批量数据处理的测控场合,如工业自动化控制、电力电子技术应用、智能化仪器仪表及电机、马达伺服控制系统等。
本章将介绍TMS320C28x系列芯片的结构、性能及特点,并给出该系列芯片的引脚分布及引脚功能。
1.1 TMS320C28x系列芯片的结构及性能C28x系列的主要片种为TMS320F2810和TMS320F2812。
两种芯片的差别是:F2812内含128K×16位的片内Flash存储器,有外部存储器接口,而F2810仅有64K×16位的片内Flash存储器,且无外部存储器接口。
其硬件特征如表1-1所示。
表1-1 硬件特征特征F2810 F2812 指令周期(150MHz) 6.67ns 6.67ns SRAM(16位/字)18K 18K 3.3V片内Flash(16位/字)64K 128K 片内Flash/SRAM的密钥有有Boot ROM 有有掩膜ROM 有有外部存储器接口无有事件管理器A和B(EVA和EVB) EVA、EVB EVA、EVB *通用定时器 4 4 *比较寄存器/脉宽调制16 16 *捕获/正交解码脉冲电路6/2 6/2看门狗定时器有有12位的ADC 有有*通道数16 16续表特征F2810 F2812 32位的CPU定时器 3 3串行外围接口有有串行通信接口(SCI)A和B SCIA、SCIB SCIA、SCIBTMS320C28x系列DSP的CPU与外设(上)·2·控制器局域网络有有多通道缓冲串行接口有有数字输入/输出引脚(共享)有有外部中断源 3 3供电电压核心电压1.8VI/O电压3.3V核心电压1.8VI/O电压3.3V封装 128针PBK 179针GHH,176针PGF温度选择‡A:-40℃ ~ +85℃S:-40℃ ~ +125℃PBK仅适用于TMSPGF和GHH仅适用于TMS产品状况‡‡产品预览(PP)高级信息(AI)产品数据(PD)AI(TMP)‡‡‡AI(TMP)‡‡‡注:‡ “S”是温度选择(-40℃ ~ +125℃)的特征化数据,仅对TMS是适用的。
DSP2812实验指导书第三部分
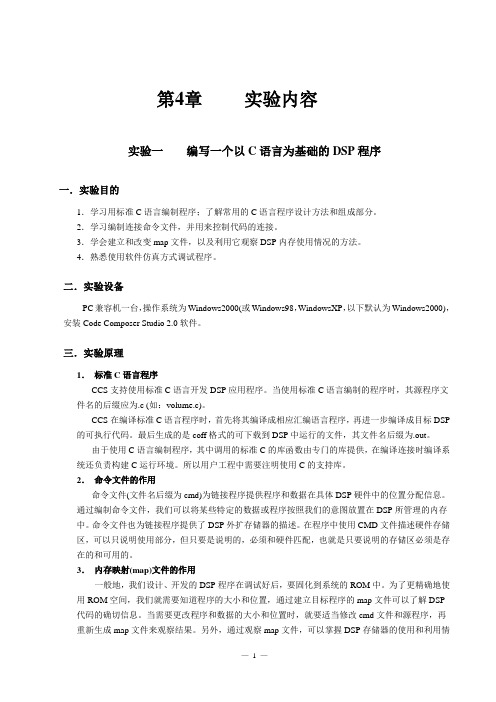
第4章实验内容实验一编写一个以C语言为基础的DSP程序一.实验目的1.学习用标准C语言编制程序;了解常用的C语言程序设计方法和组成部分。
2.学习编制连接命令文件,并用来控制代码的连接。
3.学会建立和改变map文件,以及利用它观察DSP内存使用情况的方法。
4.熟悉使用软件仿真方式调试程序。
二.实验设备PC兼容机一台,操作系统为Windows2000(或Windows98,WindowsXP,以下默认为Windows2000),安装Code Composer Studio 2.0软件。
三.实验原理1.标准C语言程序CCS支持使用标准C语言开发DSP应用程序。
当使用标准C语言编制的程序时,其源程序文件名的后缀应为.c (如:volume.c)。
CCS在编译标准C语言程序时,首先将其编译成相应汇编语言程序,再进一步编译成目标DSP 的可执行代码。
最后生成的是coff格式的可下载到DSP中运行的文件,其文件名后缀为.out。
由于使用C语言编制程序,其中调用的标准C的库函数由专门的库提供,在编译连接时编译系统还负责构建C运行环境。
所以用户工程中需要注明使用C的支持库。
2.命令文件的作用命令文件(文件名后缀为cmd)为链接程序提供程序和数据在具体DSP硬件中的位置分配信息。
通过编制命令文件,我们可以将某些特定的数据或程序按照我们的意图放置在DSP所管理的内存中。
命令文件也为链接程序提供了DSP外扩存储器的描述。
在程序中使用CMD文件描述硬件存储区,可以只说明使用部分,但只要是说明的,必须和硬件匹配,也就是只要说明的存储区必须是存在的和可用的。
3.内存映射(map)文件的作用一般地,我们设计、开发的DSP程序在调试好后,要固化到系统的ROM中。
为了更精确地使用ROM空间,我们就需要知道程序的大小和位置,通过建立目标程序的map文件可以了解DSP 代码的确切信息。
当需要更改程序和数据的大小和位置时,就要适当修改cmd文件和源程序,再重新生成map文件来观察结果。
第2章TMS320F2812DSP内部结构
内容摘要
TMS320C2000概述 2.1 TMS320F2812中央处理单元 2.2 TMS320F2812存储器配置 2.3 TMS320F2812的引导加载方式 2.4 TMS320F2812的低功耗模式
2
TMS320C2000概述
TMS320C2000是TI公司继第二代定点DSP 处理器TMS320C2X和第三代定点DSP处理器 TMS320C5X之后出现的一种低价格、高性能的 定点DSP芯片。 主要包括: TMS320C24X、TMS320C28X两个子系列。
EVA/EVB
16通道
12位ADC
XRS
X1/XCLKIN X2 XF_XPLLDIS
系统控制 (振荡器、 PPL、外设时 钟、低功耗模 式、看门狗)
RS
CLKIN 存储器总线 外设总线
26
代码保护的模块
2.1.1 TMS320F2812CPU内部结构
TMS320F2812中包含一个高性能低功耗的32位 定点CPU内核,它主要负责DSP内部指令的控制和 数据的处理,主要由CPU内部寄存器、总线及相应 控制逻辑组成: 1.32位中央算术逻辑单元(CALU) 2.32位累加器(ACC) 3.能进行16bit×16bit或32bit×32bit定点乘法运 算的硬件乘法器(MUL) 4.桶形移位器 5.辅助寄存器算术单元(ARAU)及地址产生逻辑 6. 程序地址产生器及控制逻辑
Register Bus / Result Bus Data/Program-write Data Bus (32) Data-write Address Bus (32)
乘法器
Program Bus Data Bus
32 16 32
操作数1
TMS32OF2812与DIP-IPM的通用电路设计.doc
TMS 32OF2812与DIP-IPM的通用电路设计引言:随着电子技术的高速发展,功耗与节能为电子技术提出了新的要求。
在电力电子技术方面,交流电机的变频调速更成了电机控制的主流,变频调速是利用电力半导体器件的通断作用将工频电源变换为另一频率的电能控制装置。
主要采用交流一直流一交流方式,即把工频交流电源通过整流器转换成直流电源,然后再把直流电源转换成频率、电压均可控制的交流电源。
变频调速技术凭借其节能降耗、改善工艺和提高控制精度等方面的优点,使得变频调速技术发挥了交流电机本身固有的优点,解决了交流电机调速性能先天不足的问题。
本文先对TMS320 F2812芯片和智能功率模块进行了详细的介绍,根据他们的特点设计了通用变频电路设计方案。
在实际的应用中可以根据控制方式的需要,制定不同的控制方式,广泛应用于三相异步电机的SVPWM控制。
1 变频调速方式交流电机的转速为n1=60f/p,再根据异步电机转差率s=(n1-n)/n1,可知交流异步机的转速公式为:n=n1(1-s)=(1-s)60f/p,其中P为极对数,s为转差率,f为定子供电频率,当p和s为定植时,要改变电机的转速,只需要改变f就可以了,根据控制方式的不同,一般可以分为三种调速方式:在变频调速过程中保持定子电压和定子供电频率之比为常数,即恒磁通变频调速,保持定子电流不变的恒流控制调速方式,保挣恒电磁通调速方式。
在具体控制上,可以采用VVVF(Variable Voltagevariable Frequency)变频或矢量控制变频控制方式,在电路设计时,需要实时采样相电压以及各相电流,根据控制方式的不同,可以选用不同的算法程序。
2 高速DSP芯片TMS320F2812介绍TMS320F2812DSP是德州仪器公司(TI)推出的一款32位高性能数字信号处理器,它是专为控制设计的高速DSP芯片,拥有峰值每秒运行150万条指令(MIPs)的处理速度和单周期完成32×32位MAC运算的功能,再加上两个事件管理器(E VA和EVB)、片上Flash以及片上RAM和AD转换模块,能够实现实时快速的数字信号处理算法,在三相异步电机控制系统中广泛的被采用。
TMS320F2812外设例程系列之McBsp
TMS320F2812外设例程系列之McBsp//############################################### ######################//文件: Example_281xMCBSP_FFDLB_int.c//功能: 设置McBSP为内部自循环模式,发送数据,接收数据,并比较发送与接收的数据//发送数据如下://00 01 02 03 04 05 06 07//01 02 03 04 05 06 07 08//02 03 04 05 06 07 08 09//....//FE FF 00 01 02 03 04 05//FF 00 01 02 03 04 05 06//etc..//观测变量:// sdata// rdata// rdata_point//############################################### #######################include "DSP281x_Device.h" //头文件#include "DSP281x_Examples.h"//函数声明interrupt void mcbspTxFifoIsr(void);interrupt void mcbspRxFifoIsr(void);void mcbsp_init(void);void error(void);//全局变量Uint16 sdata[8]; //发送数据Uint16 rdata[8]; //接收数据Uint16 rdata_point;//主程序void main(void){Uint16 i;//步骤1.初始化系统控制(PLL, 看门狗,使能外设时钟)InitSysCtrl();//步骤2.初始化 GPIO//InitGpio(); //本例中略过//只需配置McBSP功能GPIOInitMcbspGpio(); //配置GPIO为McBSP引脚//步骤3.清除所有中断并初始化PIE向量表//关CPU所有中断DINT;//初始化PIE控制InitPieCtrl();//禁止CPU所有中断并清除所有中断标志位 IER = 0x0000;IFR = 0x0000;//初始化 PIE 中断向量表InitPieVectTable();EALLOW;PieVectTable.MRINTA= &mcbspRxFifoIsr; PieVectTable.MXINTA=&mcbspTxFifoIsr; EDIS;//步骤4.初始化所有外设//InitPeripherals(); //本例中不需要mcbsp_init(); //只需初始化McBSP//步骤5. 用户代码段, 使能中断//初始化发送数据缓冲器for(i=0; i<8; i++){sdata[i]=i;}rdata_point = 0;//使能本例所需中断PieCtrlRegs.PIECRTL.bit.ENPIE = 1; //使能 PIE 模块PieCtrlRegs.PIEIER6.bit.INTx5=1; //使能 PIE Group 6, INT 5PieCtrlRegs.PIEIER6.bit.INTx6=1; //使能 PIE Group 6, INT 6IER=0x20; //使能 CPU INT6EINT; //使能全局中断//步骤6. 空循环for(;;);}void error(void){asm(" ESTOP0"); // 测试失败! 停止! for (;;);}//McBSP 初始化函数void mcbsp_init(){//复位 McBSPMcbspaRegs.SPCR2.bit.FRST=0; //帧同步信号产生器复位McbspaRegs.SPCR2.bit.GRST=0; //复位采样率发生器McbspaRegs.SPCR2.bit.XRST=0; //发送器复位McbspaRegs.SPCR1.bit.RRST=0; //接收器复位//初始化 McBSP 寄存器组//McBSP register 配置为数字自循环模式McbspaRegs.SPCR2.all=0x0000; //发送器禁止McbspaRegs.SPCR1.all=0x8000; //接收器禁止McbspaRegs.RCR2.all=0x0001;//接收帧位单相位帧,每帧一个串行字,每个串行字位8位,无压缩扩展模式,1位数据延时McbspaRegs.RCR1.all=0x0; //接收帧长度为每帧一个串行字,每个串行字位8位McbspaRegs.XCR2.all=0x0001;//发送帧位单相位帧,每帧一个串行字,每个串行字位8位,无压缩扩展模式,1位数据延时McbspaRegs.XCR1.all=0x0; //发送帧长度为每帧一个串行字,每个串行字位8位McbspaRegs.SRGR2.all=0x3140;McbspaRegs.SRGR1.all=0x010f; //配置采样率生成器McbspaRegs.MCR2.all=0x0;McbspaRegs.MCR1.all=0x0;McbspaRegs.PCR.all=0x00a00;McbspaRegs.MFFTX.all=0x4028;McbspaRegs.MFFRX.all=0x0028;McbspaRegs.MFFCT.all=0x0000;McbspaRegs.MFFINT.all=0x0000;McbspaRegs.MFFST.all=0x000;//使能 FIFOMcbspaRegs.MFFTX.bit.TXFIFO_RESET=1;McbspaRegs.MFFRX.bit.RXFIFO_RESET=1;//使能采样率生成器McbspaRegs.SPCR2.bit.GRST=1;delay_loop();//使能接收/发送单元McbspaRegs.SPCR2.bit.XRST=1;McbspaRegs.SPCR1.bit.RRST=1;//帧同步信号产生器复位McbspaRegs.SPCR2.bit.FRST=1;}//McBSP发送中断服务程序interrupt void mcbspTxFifoIsr(void){Uint16 i;for(i=0; i<8; i++){McbspaRegs.DXR1.all=sdata[i];}//下一个要发送的数据for(i=0; i<8; i++){sdata[i] = sdata[i]+1;sdata[i] = sdata[i] & 0x00FF;}McbspaRegs.MFFTX.bit.TXFFINT_CLEAR=1;PieCtrlRegs.PIEACK.all|=0x20; //发送PIE应答信号}//McBSP 接收中断服务程序interrupt void mcbspRxFifoIsr(void){Uint16 i;for(i=0; i<8; i++){rdata[i]=McbspaRegs.DRR1.all;}for(i=0; i<8; i++){if (rdata[i] != ( (rdata_point+i) & 0x00FF) ) error();}rdata_point = (rdata_point+1) & 0x00FF;McbspaRegs.MFFRX.bit.RXFFOVF_CLEAR=1; //清除溢出标志位McbspaRegs.MFFRX.bit.RXFFINT_CLEAR=1; //清除中断标志位PieCtrlRegs.PIEACK.all|=0x20; //发送PIE应答信号}。
CCS5 DSP2812工程文件构建
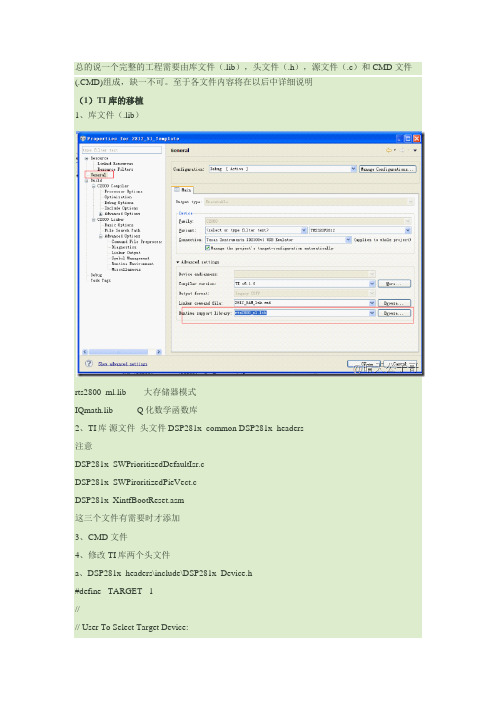
总的说一个完整的工程需要由库文件(.lib),头文件(.h),源文件(.c)和 CMD 文件(.CMD)组成,缺一不可。
至于各文件内容将在以后中详细说明(1)TI 库的移植1、库文件(.lib)rts2800_ml.lib --- 大存储器模式IQmath.lib --- Q化数学函数库2、TI库源文件头文件 DSP281x_common DSP281x_headers注意DSP281x_SWPrioritizedDefaultIsr.cDSP281x_SWPiroritizedPieVect.cDSP281x_XintfBootReset.asm这三个文件有需要时才添加3、CMD 文件4、修改TI库两个头文件a、DSP281x_headers\include\DSP281x_Device.h#define TARGET 1//---------------------------------------------------------------------------// User To Select Target Device:#define DSP28_F2812 TARGET#define DSP28_F2811 0#define DSP28_F2810 0b、DSP281x_common\include\DSP281x_Examples.h#define CPU_RATE 6.667L // for a 150MHz CPU clock speed (SYSCLKOUT) //#define CPU_RATE 7.143L // for a 140MHz CPU clock speed (SYSCLKOUT) 5、编写文件包含头文件#include "DSP281x_Device.h" // DSP281x Headerfile Include File#include "DSP281x_Examples.h" // DSP281x Examples Include File(2)TI库文件解释文件描述DSP281x_GlobalPrototypes.h这个文件包含外设详细的函数原型DSP281x_Adc.cADC具体函数和宏DSP281x_CpuTimers.cCPU-Timer具体函数和宏DSP281x_Ecan.c增强CAN详细函数和宏DSP281x_Ev.cEV详细函数和宏DSP281x_Gpio.cGPIO详细函数和宏DSP281x_Mcbsp.cMcBSP详细函数和宏DSP281x_PieCtrl.cPIE控制详细函数和宏DSP281x_Sci.cSCI详细函数和宏DSP281x_Spi.cSPI详细函数和宏DSP281x_SysCtrl.c系统控制(看门够,时钟,pll等) 详细函数和宏DSP281x_Xintf.cXINTF详细函数和宏DSP281x_Xintrupt.c外部中断详细函数和宏DSP281x_CodeStartBranch.asm当代码导入Flash,OTP或H0 SARAM存储器时,此程序确定代码从哪个分支开始执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大连理工大学机械工程学院微系统中心文] [MC2812设计档[移动机器人控制系统设计]戎成功[2011‐6‐28][本文是一篇技术文档,按照从整体到局部的顺序叙述了该系统(移动机器人控制系统,MC2812)的硬件设计过程,并涉及到部分PCB布局及布线的相关知识点。
]目录0、系统硬件框图 41、电源电路设计 51.1、5V电路的设计 5 1.2、3.3V和1.8V电路设计 82、复位电路设计 133、时钟电路设计 164、JTAG电路设计 185、RS232接口电路设计 216、1602液晶接口电路设计 247、LED及蜂鸣器电路设计 278、PWM及码盘接口电路设计 289、未用引脚的处理及I/O口的扩展 329.1、暂时未用的通用I/O口的扩展 32 9.2、未用模数转换引脚的处理 3410、PCB布局及布线相关 3610.1、布局 36 10.2、布线 37 10.3、降低噪声与电磁干扰 38附录A 电容的作用 40 附录B 系统原理图及PCB 42 附录C PCB实物图 45附录D 焊接及测试 46附录E MC2812实物图 48 附录F MC2812设计不足及其他 491、XCLKOUT引脚未能成功引出 492、电源芯片1117的摆放位置有误 493、1.8V电源走线问题 504、晶振及蜂鸣器封装出现小偏差 505、焊接的芯片型号与设计不符 506、AD相关 500、系统硬件框图设计本系统的目的是控制移动机器人的运动,系统组成参见以下框图所示:其中,驱动电路是之前设计的,做成了一个单独的电路板,这里不再赘述。
整个电路可以分为两个部分:最小系统和接口电路。
最小系统是指使处理器TMS320F2812能够可靠工作的最少电路,包括TMS320F2812集成块本身、电源电路、晶振电路、复位电路和JTAG电路。
接口电路的存在是使最小系统和外界电路的通信,从而实现系统的功能,包括码盘接口电路、PWM同驱动模块的接口、RS232通信接口等。
本文的剩余部分将带你一步步完成该系统的设计。
1、电源电路设计电源模块的设计在电路设计中有着非常重要的作用,是整个系统工作的基础,设计的质量直接关系到系统的性能,严重的质量问题还可能导致烧毁电路、损坏元件,因此设计电源时要考虑的因素有:(1)输出的电压、电流、功率;(2)输入的电压、电流、功率;(3)电池兼容和电磁干扰;(4)电源模块的散热,合理布局;(5)体积、功率限制等;针对本系统,共需要几种不同的电压:TMS320F2812核工作用的1.8V电压;TMS320F2812外设工作用的3.3V电压;其它一些部件工作用的5V电压。
因此,电源模块至少要输出这三种不同的电压。
另外,由于没有用到TMS320F2812的AD,所以这又简化了电源电路的设计,否者的话,还要考虑模拟电和数字电的隔离问题。
下面就介绍下电源电路的设计。
1.1、5V电路的设计本系统是用在移动机器人上的,所以电能量来源不可能是市电,那么一般学习板用的5V电源适配器也就不再适用。
本文打算用常见的7805来产生系统需要的5V电压。
7805是78XX系列的一款,它们都是三端正电源稳压电路,选用的封装形式为TO‐220。
它有一系列固定的电压输出——5V、6V、8V、9V、12V、15V、18V、24V,应用非常广泛。
每种类型由于内部电流的限制,以及过热和安全工作区的保护,使它基本上不会损坏。
另外值得一提的是,虽然该系列芯片是按照固定电压值来设计的,如果我们给接入适当的外部器件后,就能提供各种不同电压和电流。
下图是该系列芯片的封装图:图2 78系列稳压芯片TO‐220封装图该系列芯片的主要特点如下:● 输出电流可达1A● 过热保护● 短路保护● 输出晶体管安全工作区保护内部框图如下所示:为了更好的保护我们使用的稳压芯片,我觉得有必要了解下该芯片的一些相关极限参数:输入电压(输出电压为5~18V) (35V)热阻(结到壳)……………………5°C/W 热阻(结到空气)……………………65°C/W 工作结温范围……………………0~125°C 贮存温度范围……………………‐65~150°C 原理图如下所示:图 5V 电源电路原理图如上图,JACK1为系统电源的输入接口,即使是不同厂家的该系列芯片,也要求输入的电压比输出的至少高出2.5V ,这样输出才能稳定,那么对于7805这一款输出为5V 的芯片来说,输入要大于7.5V ,要小于上文提到的极限参数35V 。
不过,一般不会有人愿意提供很高的输入电压,原因在于它本身的工作原理:在其输入电压范围内,随着输入电压的升高,输出电压并不升高,而输出电流近似等于输入电流,所以很高的输入电压会降低该芯片的转换效率,其余的输入电能全都转化成热而散失在空气中,如果不能及时散热,随着使用时间的增加,芯片的温度会不断升高,当超过上文提到的工作结温后,芯片可能会不能正常工作,甚至烧毁。
所以,一般情况下,提供9V 的输入是比较合适的。
C5、C7和C6、C8分别并在稳压芯片的输入端和输出端,作用是滤波,其容值的选取原则是“一大并一小,滤波效果会更好”;DS1作为电源指示灯,能方便的观察到该部分的电源电路是否正确的工作了,R1的作用是限流。
至于P9和P11,它们是电源的扩展接口。
其中,P9扩的是7805的输出——5V 的电压,而P11扩的是7805的输入,至于是几伏,需要根据实际的连接来确定。
P8的作用是通过一个转换开关或者是短路冒的方式来实现7805的输出将要连接到哪一个电源的模块。
明白?没关系,请看下文。
1.2、3.3V和1.8V电路设计TMS320F2812处理器要求采用双电源(1.8/1.9V和3.3V)为系统供电,有如下一些电源引脚:CPU核的电源(VDD)……1.8V,当工作在150MHz的时候为1.9VI/O电源(VDDIO)……3.3VADC模拟电源引脚(VDDA2,VDDAIO)……3.3VAADC核电源(VDD1A18,VDD2A18)……1.8VAFlash程序电源(VDD3VFL)……3.3V地电源引脚(VSS,VSSIO)ADC模拟地(VSSA2,VSSAIO)ADC模拟/内核地(VSS1AGND,VDD2AGND)要保证TMS320F2812芯片的正常工作,所有的电源引脚都必须正确连接,不能让任何引脚悬空。
由于本系统未用到模数模块,其电源的相关引脚都连接到了相对应电压值的数字引脚上,具体的连接请参考本文的第9部分。
为了保证上电过程中所有模块具有正确的复位状态(相关引脚处于确定的状态),要求处理器要按一定的顺序上电:首先给所有模块的 3.3V电压供电(VDDIO、VDD3VFL、VDDA1/VDDA2/VDDAIO/AVDDREFBG)。
然后提供1.8或1.9V电压。
要求在VDDIO(3.3V)电压达到2.5V之前,1.8/1.9V电压不能超过0.3V。
同样,在掉电的时候,也需要按照一定的顺序:在电源关闭期间,在1.8/1.9V降低到1.5前,处理器的复位引脚必须插入最小8us的低电平,这样有助于在VDDIO/VDD掉电之前,片上的Flash逻辑处于复位状态。
因此,一般采用复位芯片或者电源管理芯片来实现这个功能。
常用的产生3.3V和1.8V电压的芯片是1117系列的低压差线性稳压器。
如果用该系列的稳压芯片来产生所需的3.3V和1.8V电压,则需要两片不同的该系列芯片,那么就需要采取一定的措施来满足上述的上电和掉电顺序。
而TPS767D318作为一款稳压器,它能提供两路独立的输出——1.8V和3.3V,这样一来,我们只需要一片该芯片,就能满足TMS320F2812的电压需求。
而且,这款芯片是TI设计的,它和TPS767D325、TPS767D301作为一个系列,专门用于DSP应用。
所以,用它来为TMS320F2812提供两路电压是可行的,而且市场上有不少的TMS320F2812开发板用的都是该芯片。
那么作为3.3V和1.8V的电源模块,这里就有了两个方案可供选择。
到底选择哪一个呢?我们来分析下:1117系列芯片一个很大的特点是价格优势,而且很常用,容易购买,但不确定其是否能满足TMS320F2812对上电次序的要求。
不过可以确定的是,市面上有些开发板用的是两片1117系列的芯片。
所以说,用1117系列的芯片是有一定可信度的。
而对于TPS767D318,其可实现性应该是不容置疑的,可其成本和购买的难度让我有了放弃之的念头,不过还不能。
那么冲着1117系列芯片的特点,我们不妨一试,可万一板子都焊接好了而该电源模块不好用,怎么办?重新画板、加工、焊接,这怎么行,浪费的是时间、人力和财力。
所以,在设计阶段,把这两个3.3V和1.8V电压的产生模块都画在了板子上,这并不会耽误太久的时间。
在焊接板子的时候,优先选用1117系列的芯片来产生3.3V和1.8V的电压,如果好用了,万事大吉;如果不好用,就再请TPS767D318上阵。
而这个两个模块之间的切换,就靠前一节所述的那个P8。
好了,思路有了,下面我们来一起看看这两个模块的电路设计。
1.2.1、使用TPS767D318设计首先来看看该芯片的性能,具有如下特点:双路输出,1.8V和3.3V每路能提供最大1A的电流快速的响应能力当输出电流为1A时,压降为350mV超低的静态电流,典型值为85uA有两路开漏输出的上电复位引脚,延时为200ms带有热焊盘(快速的散热)带有热保护功能然后,来关注下其datasheet提供的极限参数:输入电压(1IN,2IN,1EN,2EN)………………‐0.3V to 13.5V输出电压(1OUT,2OUT) (7V)输出电压(1RESET,2RESET)……………………16.5V工作温度……………………………………………‐40℃ to 125℃贮存温度……………………………………………‐65℃ to 150℃下图为其引脚分布图:图 TPS767D318引脚分布图NC表示该引脚没有内部连接,EN是使能端子,RESET引脚能在上电期间输出复位信号,一般接处理器的复位端子。
1OUT输出的是1.8V的电压,2OUT输出的是3.3V。
至于FB/NC端子,它在TPS767D318和TPS767D3255中没有内部连接关系,而在TPS767D301中接的是反馈,用来调节输出的电压值。
关于RESET引脚,在这里多说些,因为它和后面的复位电路的设计有一定的关系。
按照其datasheet上的说法,该引脚可以监控稳压器的工作状态,其内部的比较器可以用来监控输出电压:当输出低于其额定输出值的95%时,该引脚将输出低电平。
这样的话,把该引脚和处理器的复位信号引脚相连,在上电期间,就可以实现处理器的复位。