PanoSim-ADAS传感模型介绍
宏观经济学第五章 ADAS模型

宏观经济学第五章 ADAS模型第五章 ADAS模型在宏观经济学中,ADAS模型是用来分析经济活动中总供给和总需求变化的一种工具。
ADAS模型是由三个基本方程组成的:总供给方程:AS = f(Y, Z)总需求方程:AD = f(P, Y)平衡方程:Y = AS(P) = AD(P)其中,AS代表总供给,AD代表总需求,Y代表总产出,P代表物价水平,Z代表影响总供给的其他因素。
我们要理解每个方程的含义。
总供给方程表示经济的总供给量是由产出和物价水平以及其他因素共同决定的。
总需求方程表示经济的总需求量是由物价水平和产出以及其他因素共同决定的。
平衡方程则表示在给定的物价水平下,经济的总产出等于总供给量和总需求量的平衡。
接下来,我们来分析ADAS模型的应用。
ADAS模型可以用来解释经济的短期波动。
在短期内,物价水平、产出和就业量可能会因为各种原因而发生变化。
例如,如果发生了自然灾害,产出可能会下降,物价水平可能会上升。
在这种情况下,ADAS模型可以帮助我们理解这些变化的原因和结果。
ADAS模型还可以用来预测经济趋势。
通过分析历史数据和当前的经济形势,我们可以预测未来的物价水平和产出趋势。
这可以帮助政策制定者制定更加有效的经济政策。
ADAS模型还可以用来评估经济政策的效果。
例如,如果政府实行了扩张性的货币政策,这可能会刺激总需求,从而增加产出和就业量。
在这种情况下,ADAS模型可以帮助我们评估这种政策的效果和可持续性。
ADAS模型是宏观经济学中一个非常重要的工具,它可以用来分析经济活动中的各种问题和现象。
通过理解ADAS模型的基本原理和应用,我们可以更好地理解经济的运行机制和政策效果。
西方经济学中,ADAS模型是最具代表性的模型之一,它代表着总供给与总需求模型,是经济学中用于分析经济周期和政策效应的重要工具。
ADAS模型是由三部分组成:总供给曲线、总需求曲线和短期与长期均衡。
总供给曲线表示的是在一定的价格水平上,企业愿意提供的商品和服务的数量;总需求曲线表示的是在一定的价格水平上,消费者愿意购买的商品和服务的数量;短期与长期均衡则是通过总供给曲线和总需求曲线的交点来确定。
电动小车自动变道环境感知系统
同济大学学报(自然科学版) JOURNAL OF TONGJI UNIVERSITY( NATURAL SCIENCE)
Vol. 47 No. 8 Aug. 2019
文章编号:0253-374X(2019)08-1201-06
DOI: 10.11908/j. issn. 0253-374x. 2019. 08. 018
国内,针对环境感知的研究大多集中于清华大 学、吉林大学等高校中•如侯德藻等⑷利用毫米波雷 达、激光雷达开发了碰撞预警系统及自适应巡航 (ACC)系统,利用 CCD( charge coupled device)摄像 机实现了车道保持,利用全景相机开发了环视倒车 辅助系统等,并提供了具有实用性的控制技术,相关 的技术在长安汽车、东风日产以及宇通、金龙等企业 实现了推广应用.高振海等⑷基于车载毫米波雷达 , 采用自适应卡尔曼滤波算法实现了对前方目标的位 置、速度的实时估计,并通过真实道路环境下的实车 对比试验对算法的可行性和估计精度进行了试验验 证.吴永存皈设计 了 FMCW (frequency modulated continuous wave)毫米波雷达的单元平均恒虚警检 测算法和选大恒虚警检测算法,降低了虚警概率并 提高目标正确检测概率•其中,部分感知算法的性能 达到了国际先进水平,但目前尚无与国外类似的系 统集成技术.如毫米波雷达探测方面,国内尚无类似 博世、德尔福等公司的高性能产品,但车用高性价比 雷达研究已逐步展开.机器视觉感知方面,国内尚无
Abstract: An automatic lane change (ALC) environment perception system of an electric vehicle is established. Besides, the ALC real vehicle platform and steering system structural transformation scheme are introduced. In add让ion, a low-cost and reliable environment perception scheme is designed. Moreover, for the front vehicle of the same lane, the data of a 24 Ghz millimeter wave radar and a forwardlooking camera are fused through weighted fusion algorithm. Furthermore, through real vehicle acquis让ion, the ideal weight curves of the two sensors at different distances are fitted, which improves the accuracy and stability of the environment perception. Finally, the applicability of the ALC environment perception system of the electric vehicle is verified in an obstacle avoidance lane change experiment.
adas模型对外来冲击的反应
1. 简介:介绍ADAS模型和其对外来冲击的反应ADAS模型是一种经济学模型,用于研究经济体对外部冲击的反应。
该模型考虑了多种因素,包括经济政策和市场力量等,从而预测经济系统对外部冲击的反应。
2. 外来冲击的种类和影响外来冲击指的是来自其他国家或地区的因素对一个经济体造成的冲击。
这些冲击可以是各种形式的,例如贸易政策变化、外汇汇率波动、国际金融市场变动等。
这些外来冲击会对一个经济体的经济增长、通货膨胀、就业等方面产生影响。
3. ADAS模型的基本结构和原理ADAS模型包括了Aggregate Demand(总需求)曲线和Aggregate Supply(总供给)曲线。
其中,总需求曲线表示了一个经济体内在需求对价格和产出的影响,总供给曲线表示了生产者对价格和产出的反应。
通过研究这两条曲线的交汇点,我们可以预测经济体对外来冲击的反应。
4. ADAS模型对不同种类外来冲击的反应贸易政策变化:当一个经济体的主要贸易伙伴改变其贸易政策时,ADAS模型可以用来预测该经济体的出口和进口的变化,以及对国内产业的影响。
外汇汇率波动:外汇市场的波动会对一个经济体的产出、价格水平和进出口产生影响,ADAS模型可以帮助我们了解这些影响的程度和方向。
国际金融市场变动:国际金融市场的波动会对一个经济体的金融市场、货币政策和资本流动产生影响,ADAS模型可以帮助我们预测这些影响对经济体的影响。
5. ADAS模型的局限性和改进ADAS模型是一种简化的模型,它假设了许多简化条件,例如完全竞争市场、价格和工资的灵活调整等。
实际情况往往比模型假设更加复杂,因此模型的预测也可能存在偏差。
针对这些局限性,经济学家们提出了许多改进ADAS模型的方法,例如引入市场不完全竞争、考虑长期经济增长等因素,以使模型更加符合实际情况。
6. 结论ADAS模型是一种用于预测经济体对外来冲击的反应的重要工具。
通过研究该模型,我们可以更好地了解外来冲击的影响,从而采取相应的政策措施来应对这些冲击。
中级宏观经济学 第3章ADAS模型

二、银行体系与货币市场供求 关系
• 货币市场由公众、商业银行和中央银行 三部分构成: • 公众由家庭、企业和各类机构组成,决 定持有多少通货和存款;整个社会的货 币量为: M= CU +D (5-1) • 公众决定的通货存款比率为: • C=CU/D 0<C< 1 (5-2) • 商业银行持有存款,发放贷款,并保持 一定的储备RE。
• • • • • • • • 给出Y = AD的45。线; 给出AD = C+I =a+bY +I = (a + I)+ b Y (3-5) 1、均衡点E由AD决定; 2、P假定在短期内不变; 3、均衡产出Y*由下式决定: Y* = ( a +I) /( a + b) (3-6)
四、简单模型的扩展
三、IS-LM模型
• 1、IS曲线 • 在R-Y象限讨论商品市场均衡,从AD中 找出受利率影响的因素:有 • 投资方程:I = e-dR (5-9) • 净出口方程 NX = g - nY -mEP/P* (5-10) • 其中EP/P*为实际汇率。m为取正值的参 数。E为直接标价法表示的名义汇率。净 出口与实际汇率(反映出口产品的国际 竞争力)互相关。
• • • • • • Y = C +I + G + NX (3-2) Yd = (1-t)Y (3-7) C = a + b (1-t)Y (3-8) I = e-dR (5-9) NX= g - nY -m(q +v R ) (5-12) R = -M/hp + kY/h (5-14)
四、宏观经济政策的影响
2、LM曲线
• • • • • 令货币市场供求平衡:有 Ms = Md = (kY-hR)P M = (kY-hR)P R = M/hp + kY/h (5-14) (5-14)即为LM曲线。表示货币市场均 衡时R与Y的各种组合。
ADAS模型(1)
AD曲线 左
名义货币
经济学院
93 劳动力市场均衡与总供给曲线
1.总供给:经济社会所提供的总 产量。 2.总生产函数分短期和长期两种 形式 长期总生产函数: YL f ( N , K , T ) 短期总生产函数: Y f (L) 2.短期总生产曲线的性质:
(1)总生产函数的一阶导数大于零;
经济学院
2.短期总供给曲线的类型
在西方经济学理论中,由于各学派对劳动力市场的假定 不完全相同(主要是劳动工资有无刚性),从而有几条不 同的短期总供给曲线: (1)古典的短期总供给曲线(垂直线) (2)凯恩斯主义的短期总供给曲线(反“L”型)
(3)极端的凯恩斯主义的短期总供给曲线(水平线)
经济学院
(一)古典的短期总供给曲线
经济学院
一、总需求函数
AD函数可从IS—LM模型中推导
Y
MD P
a I 0 G0 bTX 0 bTR 0 1b
h 1b r
k Y m0 lr
求解联立方程得总需求函数
Y f (P)
经数理分析可以发现:
Y与P之间存在负相关系
经济学院
二、总需求曲线的推导(利用IS—LM模型)
经济学院
四、AD曲线与(非)均衡的关系
r
r2 r0 r1 E2 LM(P2,Y)
LM(P0,Y)
LM(P1,Y)
E0
E1 IS Y2 Y0 Y1 Y
AD曲线之外的任意一点均 代表双重非均衡
P
P2
P0 P1 AD
AD曲线上的任意一点 均代表双重市场均衡
Y
经济学院
四、AD曲线与(非)均衡的关系
P AE<NI MD>M B A AE>NI MD<M AD
对我国宏观经济波动的ADAS模拟分析

对我国宏观经济波动的AD-AS模拟分析陈学彬2012-8-13 15:41:32 来源:《经济研究》(京)1995年05期第59-69页作者简介:陈学彬上海财经大学贸易经济系AD-AS模型(总需求——总供给模型)是现代西方经济学中重要的宏观经济理论模型,是分析市场经济社会总量失衡问题及客观经济波动问题的重要工具,在西方国家被广泛应用。
AD-AS模型原理在近年我国经济理论分析中已获初步应用。
本文根据AD-AS模型基本原理,结合我国实际进行修改和补充的基础上建立的AD-AS动态仿真模型,将一般的AD-AS几何图形模型转换成为能够实际运算的代数方程模型。
并利用它对我国改革以来的宏观经济运行轨迹进行了历史仿真检验和未来运行动态模拟分析。
在将AD-AS模型实用化方面进行了初步的尝试。
一、模型结构本文建立的我国AD-AS动态仿真模型由价格调整方程(总供给方程的变形)、价格预期方程、总需求方程、货币供给增长率控制方程、货币流通速度变化率方程、潜在总产出方程和其它辅助方程构成。
模型涉及到如下变量:m为货币供给增长率、v为货币流通速度变化率,q为总需求增长率,Q为实际GNP,Q[*]为潜在GNP,q[*]为潜在GNP增长率,p为价格上涨率,pt为价格预期,PO为价格稳定目标,ma为货币供给增长率调控参数。
模型假定我国改革以来的宏观价格波动主要是由总供求失衡前一季度供求状况决定,仿真间隔因此定为0.25年(1个季度)。
模型各方程的表达式及其含义如下:1.价格总水平波动方程价格总水平波动方程又称价格调整方程。
它反映价格总水平随供求平衡状况和价格预期、价格冲击的变化而上下波动的情况。
它是总供给方程的变形。
其基本表达式为:可见,该方程由供求平衡状态影响项、价格预期影响项和价格冲击影响项组成。
该方程与附加预期的菲力普斯曲线方程:十分相似。
式中,π为通货膨胀率,π[e]为通货膨胀预期,Y为实际GNP,Y[*]为潜在GNP,Z为价格冲击,f为参数。
PanoSim快速入门

基于PanoSim的ADAS摄像头在环测试系统解决方案
基于PanoSim的ADAS摄像头在环测试系统解决方案背景摄像头是ADAS核心传感器,相比毫米波雷达和激光雷达等,最大优势在于识别(物体是车、人或者障碍物等、标志牌是什么颜色)。
汽车行业内价格敏感,摄像头硬件成本相对低廉,因为近几年计算机视觉发展迅速,从摄像头角度切入ADAS感知越来越被各大机构、主机厂以及ADAS研发公司等青睐。
摄像头在环标准化测试是智能汽车产业化的必经之路,各种视觉传感器算法随之而来,摄像头算法的验证也越来越重要。
许多掌握核心的视觉传感器算法的视觉方案提供商对ADAS摄像头在环测试系统的需求越来越大。
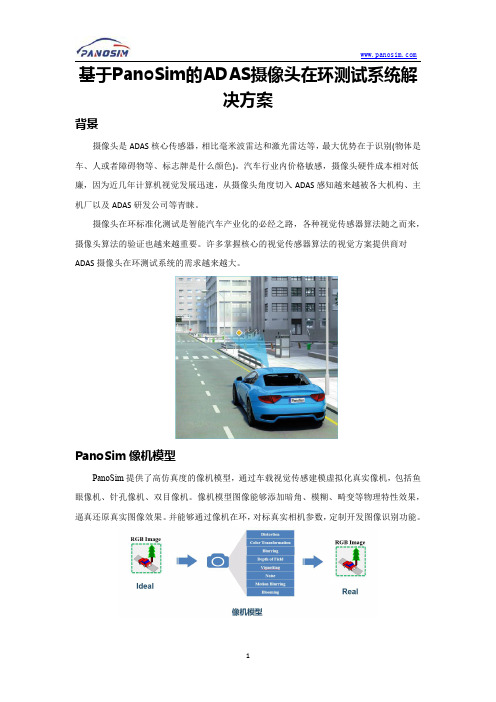
PanoSim像机模型PanoSim提供了高仿真度的像机模型,通过车载视觉传感建模虚拟化真实像机,包括鱼眼像机、针孔像机、双目像机。
像机模型图像能够添加暗角、模糊、畸变等物理特性效果,逼真还原真实图像效果。
并能够通过像机在环,对标真实相机参数,定制开发图像识别功能。
方案简介PanoSim依据现阶段各种机构、主机厂的像机要求,根据真实摄像头接入以及控制器接入,提供两种摄像头硬件在环仿真测试方案:●摄像头暗箱在环:基于显示屏画面拍摄方案,直接接入真实摄像头系统;●摄像头控制器在环:将场景环境数据直接注入ADAS控制器,单独对控制器进行测试。
摄像头暗箱在环采用由摄像头作为图像信号采集处理单元进行硬件在环仿真,在暗箱中,由工控机生成暗箱中显示器虚拟场景画面,摄像头拍摄虚拟场景画面,实时采集传感数据,输出至传感数据处理单元供图像处理器进行数据处理,并将处理结果传输给传感融合ECU,最后通过控制算法对进行车辆闭环控制。
摄像头暗箱在环实现流程如下图所示:摄像头硬件在环实现流程采用真实摄像头在环功能性能:●真实摄像头数据采集传输;●为道路实测提高系统置信度;●图像传输延迟≤1ms;●精确的图像数据;●支持各种摄像头在环。
摄像头控制器在环采用PanoSim作为汽车智能驾驶实时仿真平台,由工控机生成虚拟场景,根据摄像头控制器的数据接口匹配接口,将场景信息以图像数据流的方式实时注入控制器中,把图像数据流转换为传感数据,输出至传感数据处理单元供图像处理器进行数据处理,并将处理结果传输给传感融合ECU,通过用户开发的控制算法识别图像,对车辆进行算法控制。
第四节 转向系统动力学
Engine Vibration Flex Body
Complete steering Friction model
Uneven road dynamics Wheel model …… ……
1930s 1960s
1970s
Linear performance model
1990s
Nonlinear performance model
2014-07-03
吉林大学 汽车仿真与控制国家重点实验室
3
对模型的需求
转向系统模型是描述汽车方向盘转角与方向盘回 正力矩、前轮转角之间关系的模型。转向系统模 型建立的合理性和准确性是汽车动力学仿真精度 和可信度的保证
根据驾驶员的指令输入操作车轮的转向,保证汽 车整体的方向控制
需要时刻反馈方向盘的力感的动态响应; 反映左右转向轮的相位关系,实现左右转向轮贯
2014-07-03
吉林大学 汽车仿真与控制国家重点实验室
12
几种典型转向系统
SCFs NADS Tesis Carsim 华沙 ASCL
2014-07-03
吉林大学 汽车仿真与控制国家重点实验室
13
SCFs
SCFs转向系统模型是由通用汽车公司 的W. Keith Adams和Richard W. Topping 于2001年提出的,利用一系列特性函数 来描述转向系统特性的模型
转向系统动力学
吉林大学 汽车仿真与控制国家重点实验室
转向系统 由转向盘到车轮的传递系统称为转向系统
R
L
2014-07-03
吉林大学 汽车仿真与控制国家重点实验室
2
转向系统功能
改变和保持汽车的行驶方向 一方面,驾驶员通过转向系统控制前轮转
ADAS模型的名词解释
ADAS模型的名词解释ADAS,即"领域自适应系统"(Adaptive Domain System),是一种用于自动驾驶技术领域的模型。
本文将从不同角度解释ADAS模型的含义和用途,探讨其在智能交通领域的重要性。
1. ADAS的概述ADAS系统是一种基于人工智能和机器学习的技术,旨在通过合理地利用传感器、处理器和算法,提高车辆的安全性和驾驶体验。
它能够根据不同的交通环境和驾驶需求,实现自动化的驾驶操作和智能化的决策。
ADAS系统能够自动感知、分析和应对各种驾驶场景和交通状况,例如自动驾驶、自动刹车、车道保持和碰撞预警等功能。
2. ADAS系统的核心技术ADAS系统的核心技术包括传感器技术、数据处理和感知算法、控制与决策算法等。
其中,传感器技术主要包括摄像头、激光雷达、毫米波雷达等多种传感器的应用,用于感知周围环境、检测和跟踪其他交通参与者的动态行为。
数据处理和感知算法主要负责对传感器采集到的数据进行分析和处理,以实现对驾驶场景的感知和理解。
控制与决策算法则负责根据感知结果做出决策,例如制动、转向和加减速等控制操作。
3. ADAS系统的应用场景ADAS系统可应用于各种不同的道路交通场景。
例如,在高速公路上,ADAS 系统可以实现车道保持功能,保持车辆在正确的车道行驶,并通过自动加减速控制与前车保持安全距离。
在城市道路环境中,ADAS系统可以进行自动刹车和碰撞预警,有效减少交通事故的发生。
此外,ADAS系统还可以应用于停车辅助、远程控制和车辆监控等场景,增强驾驶者的驾驶体验和安全性。
4. ADAS系统的优势和挑战ADAS系统的应用在提高驾驶安全性、减少交通事故方面具有重要意义。
通过实时监测和分析驾驶环境,ADAS系统能够预防潜在的危险,并及时采取控制措施,保障驾驶者和行人的生命安全。
此外,ADAS系统还可以提高驾驶者的驾驶体验和行车效率,减少疲劳驾驶和交通堵塞。
然而,ADAS系统的应用也面临着技术难题和安全隐患等挑战,例如对复杂交通环境的理解和处理、对异常情况的应对能力等方面的问题。
ADAS研发与测试的模拟仿真技术---吉林大学

能和产品的研发的比重已经高达70%以上-- *Automotive Wikipedia
Requirement-Driven Processes
以需求为驱动的开发流程
现代汽车技术研发先进方法、理念和流程
基于先进的研发理念
Math-Based Platforms
基于数学模型的开发平台
Model-Based Approaches
基于模型的开发方法
Requirement-Driven Processes
以需求为驱动的开发流程 先进的开发理念与流程
基于先进的研发平台
Pure Simulation
离线纯仿真平台
RT-SIL/HIL Simulation
实时、软硬件在环仿真平台
工具 技术理念、方法和流程的关键 --- Charles F. Kettering,
great American inventor, engineer & businessman
Time cover
“ 工欲善其事必先利其器 ”--- 孔子《论语·魏灵公》
1933
自上世纪90年代起,模拟仿真和数字虚拟化技术已经成为了 汽车研发过程
大雾天气
为什么模拟与仿真? 成本需求
基于模拟仿真技术的虚拟研发是 节省研发成本的关键途径,也是 当今世界技术研发的主流趋势 $500
$5,000
相对成本
$50
$5
需求定义
模拟仿真
产品原型
产品开发
为什么模拟与仿真?技术切实可行
模拟仿真技术不仅必要、而且可能/可行
随着计算机、电子技术的成熟,数学模型的精确性和数值求 解能力的不断提高:数学模型也越来越接近真实的物理世界: 车辆动力学模拟 环境模拟(道路、交通与天气等) 环境传感模拟(虚拟相机、雷达和无线通信等) 驾驶员模拟
一文教你看懂无人驾驶的关键激光雷达

一文教你看懂无人驾驶的关键激光雷达自从2012年谷歌无人驾驶汽车刷屏以来,顶在车顶的全家桶总是这么引人瞩目。
而这全家桶就是传说中的激光雷达。
这款激光雷达的供应商是来自美国Velodyne,当时这个全家桶造价高达7万美刀,比车还贵!准确来说,应该可以买5辆比亚迪OK,说到这里,大家肯定要问了,激光雷达最近好像听到频率很高啊?没错,说到激光雷达就不得不提最近风头正劲的ADAS。
现阶段的ADAS,激光雷达、毫米波雷达、视觉传感器是用于周围环境感测的主流手段,是实现ADAS的必备。
而所谓激光雷达,就是利用激光束探测目标,获得数据并生成精确的数字高程模型。
它的工作原理也不难理解,就是发射和接收激光束。
在激光雷达的内部,每一组组件都包含一个发射单元与接收单元。
我们拿激光雷达领域最有名的公司Velodyne的旋转镜面设计图来说明。
激光雷达工作原理(图片来自Velodyne)这套发射/接收组件和旋转镜面结合在一起,能扫描至少一个平面。
镜面不只反射二极管发出去的光,而且也能把反射回来的光再反射给接收器。
通过旋转镜面,能够实现90到180度的视角,并且大大降低系统设计和制造的复杂度,因为镜面是这里面唯一的运动机构。
探测距离的原理是基于光返回的时间,激光二极管发出脉冲光,脉冲光照射到目标物后反射一部分光回来,在二极管附近安装一个光子探测器,它可以探测出返回来的信号,通过计算发射和探测的时间差就可以计算出目标物的距离。
脉冲距离测量系统一旦被激活就能收集到大量的点云。
如果点云中有目标物,目标物就会在点云中呈现出一个阴影。
通过这个阴影可以测量出目标物的距离和大小。
通过点云可以生成周围环境的3D图像。
点云密度越高,图像越清晰。
讲完激光雷达的原理,同志们可能又有疑问了,为什么ADAS里要装两种雷达,激光雷达。
基于PANS模型的水翼非定常空化特性研究_施卫东

V o l . 4 2N o . 4 r . 0 1 4 A 2 p
: / D O I 1 0. 1 3 2 4 5 . h u s t . 1 4 0 4 0 1 j
基于 P A N S 模型的水翼非定常空化特性研究
施卫东 张光建 张德胜
( ) 江苏大学流体机械工程技术研究中心 ,江苏 镇江 2 1 2 0 1 3
·2·
华 中 科 技 大 学 学 报 ( 自 然 科 学 版)
第4 2卷
空化模型通过二 次 开 发 技 术 耦 合 到 同 一 平 台 上 , 数值模拟 了 绕 C l a r k -y 型 水 翼 的 云 状 空 化 流 动 , 发现这几种空化模型均能清楚地描述云状空化的 产生 -发展 -脱落 的 准 周 期 性 变 化 , 只是在描述空 ] 文献 [ 在R 泡脱落细节时有一定的差异 . 9 NGk - ε 模型的基础上考 虑 了 水 气 混 合 物 的 可 压 缩 性 , 减 小了湍流黏度 , 获得了令人满意的数值预测结果 . 随着计算技术 的 发 展 , 大涡模拟( 开始在非 L E S) 然而大涡模拟的 定常的空化流计 算 中 得 到 应 用 , 结果与网格关系 很 大 , 很难得到一个网格无关性 文献[ 提出了一种桥接 R . 1 1] AN S和 L E S , 的滤 波 器 模 型 ( 降低了计算对网格的要 F BM )
A b s t r a c t a v i t a t i n t u r b u l e n t f l o w a r o u n d a 2 DC l a r k h d r o f o i l w a s s i m u l a t e d u s i n t h e P a r t i a l l C -y - g y g y ( ) A v e r a e d N a v i e r S t o k e s P AN S m e t h o d . T h e e f f e c t o f a m a x i m u m d e n s i t r a t i o b e t w e e n t h e l i u i d - g y q , a n d t h e v a o r o n c a v i t a t i n s i m u l a t i o n a n d t h e i n f l u e n c e o f c o n t r o l n P AN S m o d e l o n a r a m e t e r p g p f ki t h e c l o u d c a v i t a t i o n i n s t a b i l i t a n d t h e e v o l u t i o n o f c a v i t s h a e a n d l i f t c o e f f i c i e n t d u r i n c l o u d c a v i t a - y y p g t i o n w e r e i n v e s t i a t e d . T h e r e s u l t s s h o w t h a t t h e m a x i m u m d e n s i t r a t i o i n f l u e n c e s m a s s t r a n s f e r r a t e g y b e t w e e n t h e l i u i d a n d t h e v a o r . T h e a c c u r a c o f n u m e r i c a l r e d i c t i o n c a n b e r e a t l i m r o v e d b i n - q p y p g y p y c r e a s i n t h e m a x i m u m d e n s i t r a t i o .W i t h d e c r e a s i n t h e r e d i c t e d c a v i t a t i n f l o w b P AN S m o d - g y g p g y f k, e l b e c o m e s u n s t e a d d u e t o r e s o l v i n m o r e o f t h e t u r b u l e n t s c a l e s . T h e e v o l u t i o n o f t h e l i f t c o e f f i c i e n t y g , d u r i n t h e c l o u d c a v i t a t i o n i s v e r c o m l i c a t e d a n d d r a m a t i c b e c a u s e t h a t t h e s h e d d i n c l o u d c a v i t i s g y p g y v e r u n s t e a d . T h e c a l c u l a t e d t i m e a v e r a e d l i f t c o e f f i c i e n t i s 0. 7 0 8,w h i c h i s a b o u t 7% l o w e r t h a n y y g t h e e x e r i m e n t a l l m e a s u r e d v a l u e o f 0. 7 6 0.T h e v o r t e x a i r w i t h t h e o o s i t e r o t a t i o n d i r e c t i o n p y p p p c a u s e d b i n t e r a c t i o n b e t w e e n t h e r e e n t r a n t a n d m a i n f l o w i s t h e m a i n t r i e r o f c l o u d c a v i t . y g g y ; ; ; ; K e w o r d s a v i t a t i n f l o w; h d r o f o i l t u r b u l e n c e m o d e l c a v i t a t i o n m o d e l r e e n t r a n t e t v o r t e x a i r c j p g y y 非定常和多尺度湍流 空化是一种 涉 及 相 变 、 , 的复杂现象 许多 学 者 从 实 验 和 数 值 计 (
鱼鳔膜为基质的生物传感器测定葡萄糖的研究

分析化学 ( FENXI HUAXUE)
研究简报
第9 期 1423 ~ 1426
DOI: 10. 3724 / SP. J. 1096. 2011. 01423
Chinese Journal of Analytical Chemistry
鱼鳔膜为基质的生物传感器测定葡萄糖的研究
贾文娟 崔淼 张彦 双少敏
*
ቤተ መጻሕፍቲ ባይዱ
( 山西大学化学化工学院 ,太原 030006 ) 摘 要 以鱼鳔膜为基质固定葡萄糖氧化酶 , 偶联氧电极, 构建了葡萄糖生物传感器 , 通过测定溶解氧浓度的
pH 值、 缓冲液浓度对传感器的影响 , 优化了实验条件: 即酶浓度为 变化定量测定葡萄糖。考察了酶浓度、 1 mg,pH 7. 0 , 缓冲液浓度为 100 mmol / L。此传感器具有较宽的线性范围 ( 0. 016 ~ 1. 2 mmol / L) , 较短的响应 时间( 70 s) , 较低的检出限( 8 ! mol / L) , 良好的重复性 ( 2. 5% ,n = 10 ) 和重现性 ( 1. 2% ,n = 3 ) , 连续使用 200 次后响应信号能保持 95% 以上; 3 个月后响应信号为初始值的 88. 5% 。 此传感器已成功应用于人血清 中葡萄糖含量的测定, 测定结果与市售试剂盒法获得的结果相一致 。回收率为 95. 2% ~ 106. 3% 。 关键词 葡萄糖传感器; 鱼鳔膜; 葡萄糖氧化酶
measurements
加入 0. 05 mol / L 葡萄糖标准溶液体积 ( The standard addition of 0. 05 mol / L glucose solution in volume,respectively ) ( 0 ) 0. 0 ; ( 1 ) 2. 0 ; ( 2 ) 4. 0 ; ( 3 ) 6. 0 ; ( 4 ) 8. 0 ; ( 5 ) 10. 0 ; ( 6 ) 12. 0 ; ( 7 ) 14. 0 ; ( 8 ) 16. 0 ; ( 9 ) 18. 0 ! L。
BOPPPS模型在中学生物学概念教学中的应用
BOPPPS模型在中学生物学概念教学中的应用1. 引言1.1 介绍BOPPPS模型BOPPPS模型是一种教学设计模型,其名称代表了模型中各个环节的首字母,包括Bridge(桥梁)、Outcomes(结果)、Pre-assessment(预测评价)、Participation(参与)、Positioning (位置)、and Pace(速度)。
这个模型旨在帮助教师更好地设计和执行课堂教学,以提高学生的学习效果和兴趣。
在BOPPPS模型中,Bridge指的是在教学开始前引导学生进入新知识的过程,Outcomes指的是教学目标和预期结果的设定,Pre-assessment是在教学之前进行的评估,以了解学生的背景和知识水平,Participation强调学生参与教学的重要性,Positioning关注教学内容和学生之间的关系,Pace则关注教学进度和节奏的控制。
通过BOPPPS模型,教师可以更好地了解学生的需求和目标,有针对性地设定教学目标和选择教学方法和资源,制定符合学生需求的课堂计划和教学活动,并及时评估学生的学习效果,以帮助他们更好地掌握生物学概念。
在中学生物学教学中,BOPPPS模型的应用可以更好地激发学生的学习兴趣,提高他们的学习效果,促进生物学概念的深入理解和应用。
1.2 介绍中学生物学概念教学中学生物学概念教学是中学生学习生命科学知识的重要部分,通过教授基本的生物学概念和原理,培养学生对生命科学的兴趣和理解。
在中学阶段,学生开始接触更深入的生物学知识,如细胞结构、遗传规律、进化理论等,这些知识将为他们未来的学习和职业发展打下良好的基础。
中学生物学概念教学不仅涉及传授知识,更要引导学生运用所学知识解决实际问题,培养他们的创新思维和实践能力。
教师需要根据学生的不同特点和学习需求,采用多种教学方法和资源,以提高教学效果和学生的学习动机。
在中学生物学概念教学中,教师需要关注学生的学习进程和兴趣,根据学生的不同背景和能力制定个性化的教学计划,以激发学生学习的积极性和提高他们的学习成绩。
一种非接触式平面应变测量传感器的设计
一种非接触式平面应变测量传感器的设计作者:袁航周徐海侠来源:《科技资讯》 2014年第10期袁航周徐海侠(合肥工业大学仪器科学与光电工程学院安徽合肥 230009)摘要:设计了一款应变测量传感器,该应变测量传感器由安装在同一印制板上的三个专用芯片组成,每一个专用芯片上的CMOS感光器用于测量所在位置上的平面位移量。
通过对传感器的建模分析,确定了传感器的结构设计,并针对设计传感器的误差来源,研究了传感器与被测表面的粘贴方式和误差修正方法。
实验表明,设计的传感器能够实现毫米级形变范围内的应变测量要求,同时设计的传感器可以作为一个传感器节点,应用于无线传感的应变监测网络中。
关键词:非接触传感器平面应变测量误差修正中图分类号:TH741 文献标识码:A 文章编号:1672-3791(2014)04(a)-0021-02凡是由材料构筑起来的物体,在外力作用下都会发生应变、变形甚至断裂。
目前,应变测量已成为监测飞行器、水下探测器、石油平台、桥梁、水坝等使用条件和使用状态的一种有效的手段[1]。
应变监测离不开应变传感器。
目前已有的应变传感器,按测量维度分为两类:(1)单维度传感器,如电阻应变片、振弦传感器、光纤光栅传感器。
这类传感器为接触式测量,主要测量一个维度方向上的应变量。
(2)多维度传感器,如基于散斑测量原理的光学测量系统。
这类传感器为非接触式测量,但测量系统体积庞大、测量复杂且安装条件苛刻,不适应飞行器、水下探测器、石油平台、桥梁、水坝等多节点的现场测量[3~4]。
为了实现传感器小型化,并满足多维度应变测量的要求,提出了一种非接触式平面应变测量方法,其中的传感器由三个带有CMOS感光器的专用芯片构成,通过读取三个CMOS感光器中的平面坐标值,再经过坐标值变换和计算,来获取被测件的平面应变测量值及变形量。
由于传感器具有小型化的特点,且测量数据可以通过无线网络传输,因而可以通过多传感器测量节点组网,构建飞行器、水下探测器、石油平台、桥梁、水坝、压力容器等的在线应变监测系统[5~6]。
PanoSim-ADAS传感模型介绍
PanoSim-ADAS传感模型介绍背景未来,随着各项ADAS新法案的诞生,车辆上的标配传感器会越来越多。
举例来说,倒车影像现在就成了美国新车的强制装备。
此外,各大机构、主机厂越来越严格的碰撞测试和ADAS测试也让越来越多的用户开始习惯在车辆上搭载这些汽车电子产品。
自动泊车、高速自适应巡航和紧急自动刹车等智能辅助驾驶功能以及备受瞩目的无人驾驶技术都非常依赖传感器,因此车上的传感器不但要多,还要能正确使用。
给车辆安装这些独立系统后,司机就能获知更多信息,车辆也能实现少数自动驾驶功能。
各大机构、主机厂等对虚拟传感器模拟仿真越来越重视,传感器模拟仿真技术应运而生。
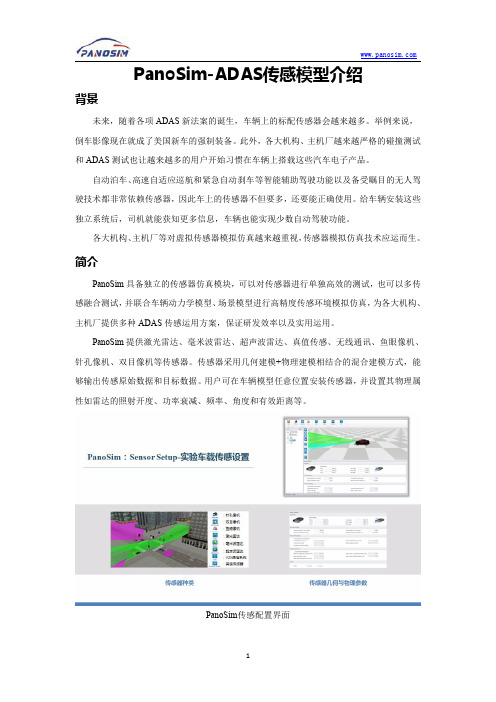
简介PanoSim具备独立的传感器仿真模块,可以对传感器进行单独高效的测试,也可以多传感融合测试,并联合车辆动力学模型、场景模型进行高精度传感环境模拟仿真,为各大机构、主机厂提供多种ADAS传感运用方案,保证研发效率以及实用运用。
PanoSim提供激光雷达、毫米波雷达、超声波雷达、真值传感、无线通讯、鱼眼像机、针孔像机、双目像机等传感器。
传感器采用几何建模+物理建模相结合的混合建模方式,能够输出传感原始数据和目标数据。
用户可在车辆模型任意位置安装传感器,并设置其物理属性如雷达的照射开度、功率衰减、频率、角度和有效距离等。
PanoSim传感配置界面功能运用●摄像头算法开发测试应用●雷达算法开发测试应用●多传感信号融合以及算法开发测试应用●雷达/摄像头在环测试设备集成PanoSim-ADAS传感模型通过结合视觉传感器模型可以直接输出仿真结果,可以为对比真实传感数据、传感算法应用、传感器数据融合算法开发等提供数据支持提高传感数据的置信度。
模型介绍雷达模型PanoSim雷达模型包括激光雷达、毫米波雷达、超声波雷达,是基于几何建模与物理建模相结合的混合建模方法,建立了基于回波信号的雷达物理建模方法,较为逼真地模拟了雷达的探测机理(而不是雷达的物理结构),并能反映环境对雷达探测信号传播的影响(噪声、杂波等干扰和衰减)模型精度较高,实时性较好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PanoSim-ADAS传感模型介绍
背景
未来,随着各项ADAS新法案的诞生,车辆上的标配传感器会越来越多。
举例来说,倒车影像现在就成了美国新车的强制装备。
此外,各大机构、主机厂越来越严格的碰撞测试和ADAS测试也让越来越多的用户开始习惯在车辆上搭载这些汽车电子产品。
自动泊车、高速自适应巡航和紧急自动刹车等智能辅助驾驶功能以及备受瞩目的无人驾驶技术都非常依赖传感器,因此车上的传感器不但要多,还要能正确使用。
给车辆安装这些独立系统后,司机就能获知更多信息,车辆也能实现少数自动驾驶功能。
各大机构、主机厂等对虚拟传感器模拟仿真越来越重视,传感器模拟仿真技术应运而生。
简介
PanoSim具备独立的传感器仿真模块,可以对传感器进行单独高效的测试,也可以多传感融合测试,并联合车辆动力学模型、场景模型进行高精度传感环境模拟仿真,为各大机构、主机厂提供多种ADAS传感运用方案,保证研发效率以及实用运用。
PanoSim提供激光雷达、毫米波雷达、超声波雷达、真值传感、无线通讯、鱼眼像机、针孔像机、双目像机等传感器。
传感器采用几何建模+物理建模相结合的混合建模方式,能够输出传感原始数据和目标数据。
用户可在车辆模型任意位置安装传感器,并设置其物理属性如雷达的照射开度、功率衰减、频率、角度和有效距离等。
PanoSim传感配置界面
功能运用
●摄像头算法开发测试应用
●雷达算法开发测试应用
●多传感信号融合以及算法开发测试应用
●雷达/摄像头在环测试设备集成
PanoSim-ADAS传感模型通过结合视觉传感器模型可以直接输出仿真结果,可以为对比真实传感数据、传感算法应用、传感器数据融合算法开发等提供数据支持提高传感数据的置信度。
模型介绍
雷达模型
PanoSim雷达模型包括激光雷达、毫米波雷达、超声波雷达,是基于几何建模与物理建模相结合的混合建模方法,建立了基于回波信号的雷达物理建模方法,较为逼真地模拟了雷达的探测机理(而不是雷达的物理结构),并能反映环境对雷达探测信号传播的影响(噪声、杂波等干扰和衰减)模型精度较高,实时性较好。
雷达模型支持设置雷达功率衰减、RCS估算等物理特性,克服了传统方法的RCS值获取难,准确度无法保证问题。
车载雷达几何模型RCS估算
✧雷达模型性能:
1)真实的模拟雷达探测机理
2)扫描实际形状,反馈RCS估算
3)考虑雷达遮挡情况
4)模拟对环境的功率衰减
5)支持波能量散射图
✧雷达模型的应用
基于超声波雷达的自动泊车应用研究
真值传感
PanoSim提供真值传感器,真值传感器为每个像素提供一个深度值的“摄像机图像”。
可以用于地面真实数据输出、提供最精准的车道线标志信息、像机输入的对象检测算法的参考、校准车道识别算法、快速生成LDW/LKA算法的输入。
目前支持对车道标记、道路边界、目标、交通标志、地图的真值输出,仿真结束后生成真值对比报告。
✧可输出的信号:
1)车道线的绝对位置;
2)传感器扫描中心的车道线距离;
3)可视化车道或路边线的标记的颜色,标签,宽度,长度和间距;
4)相机参考图像。
智能标志牌真值传感
V2X无线通信
V2X使得车与车、车与基站、基站与基站之间能够通信,从而获得实时路况、道路信息、行人信息等一系列交通信息,从而提高驾驶安全性、减少拥堵、提高交通效率、提供车载娱乐信息等。
不同于像机和雷达,通信是协作式传感器,其性能严重地依赖交通流量,实际的场地测试不易体现各种交通密度对通信的影响,通信性能十分依赖于各种噪声,场地测试无法定量化控制噪声的水平;通信性能还与道路环境密切相关,例如建筑物密集程度、障碍物遮挡等,场地测试不易覆盖各种工况。
PanoSim提供了V2X车载无线通信传感器,通过自定义应用层协议在仿真建模车载天线中模拟车载无线通信的使用性能,检测多个通信性能指标受路由算法、通信范围、处理速率、移动速度等各种关键因素的组合影响,具有仿真精度高、模块化、综合仿真效率和效果最优等特点。
✧V2X具体特性:
1)自定义通信协议,获取协议信息
2)仿真精度高
3)联合Matlab/Simulink对通信数据进行算法控制
车队V2X无线通讯
像机模型
PanoSim像机模型通过车载视觉传感建模虚拟化真实像机,包括鱼眼像机、针孔像机、双目像机。
像机模型图像能够添加暗角、模糊、畸变等物理特性效果,逼真还原真
实图像效果。
并能够通过像机在环,对标真实相机参数,定制开发图像识别功能。
像机模型建模原理
✧像机具体性能:
1)单目/双目/鱼眼像机选择
2)在Matlab/Simulink中,调用图像数据
3)在Matlab/Simulink中,实现自定义解释算法
4)多传感信号融合算法(例如与雷达/激光数据融合)
5)对象识别和分类算法
6)线识别算法
✧相机成像效果验证:
1建立对应于真实世界的场景3D模型;
2使用真实相机和虚拟相机模型分别对真实场景和3D虚拟场景进行拍摄;
3使用经典图像处理算法验证相机模型;
图像对比
像机模型效果图:
鱼眼像机效果图。