台达伺服电机驱动器B型号总结
伺服驱动器-台达ASDA_B2系列

参数设 置
10 122 123 121 100 80 1 108 DO6+ 0ms 0ms
备注
P1-00 P2-10 P4-05
正负逻辑设置 伺服开启 JOG控制
002 1001双脉冲 101 0~5000
线色
红 白 黑 黄绿 黄色 蓝色
驱动器 侧 U V W PE N24 P24
六线 动力线
电机侧
1 2 4 5 3 6
四线
电机侧 1 2 3 4
线色
编码线
电机侧 驱动器侧
红
14
黑
45
棕 橙 屏蔽
78 8 6+7 9 外壳
电 L1C
L
源 输
L2C R
N L
入
S T
N
电 出源
输
U V W PE
红 白 黑 绿
台达伺服驱动器B2
CN1 I/O信号接线 PT控制模式
八芯线
脚号
功能
线色
备注
41
37 9 11+35 14+15 16 28 33 7
PULS 脉冲
SIGN 方向 ST 报警清除 SRDY
绿
绿白 蓝 红 黑 黑白 红白 蓝白 -
35需接P24 14需接N24
需接P24 需接N24 15需接N24 27需接N24
6需接N24
参数设置
参数序号
功能
P2-08 恢复出厂值 P2-15 EMGS 紧急停止 P2-16 NL 逆向运行禁止极限 P2-17 PL 正向运行禁止极限 P1-01 控制模式 P1-44 电子齿轮比分子 P1-45 电子齿轮比分母 P2-37=108 电磁刹车控制信号 P1-42 电磁刹车开启延时 P1-43 电磁刹车关闭延时
台达伺服电机驱动器B型号总结

台达伺服电机驱动器B2型号总结
外部接线图:
图设置参数需要断掉VDD与COM+不然无法成功保存
注意:当电源切断时,因为驱动器内部大电容含有大量的电荷,请不要解除R,S,T及U,V,W这6条大电力线,请等待充电灯熄灭方可操作.
一些用到的参数设置如下:
P2-08为10:参数初始化.
P1-55为每分钟最大转速的上限
P1-44为电子齿轮比分子N
P1-45为电子齿轮比分母M
电子齿轮比的计算方法:你想要多少个脉冲转一圈电子齿轮比=马达转一圈所需要的脉冲数,电子齿轮比加倍,那么转速和行程都会加倍,反之亦然;例脉冲齿轮比16,每秒脉冲1000这样子就是0.1圈,如果是要0.2圈那么把每秒脉冲电子齿轮比等于2倍马达转一圈的脉冲数,注意脉冲最高限定5000
更多参数设置查询手册及其他资料
程序简介
END。
台达b3伺服参数设置方法_台达B2系列伺服电机的调试方法和注意事项
台达b3伺服参数设置方法_台达B2系列伺服电机的调试方法和注意事项台达b3伺服参数设置⽅法_台达B2系列伺服电机的调试⽅法和注意事项该楼层疑似违规已被系统折叠隐藏此楼查看此楼吉创给⽅家分享B2系列台达伺服电机的调试⽅法和注意事项伺服电机的调试⽅法1、初始化参数在接线之前,先初始化参数。
在伺服电机上:设置控制⽅式;设置使能由外部控制;编码器信号输出的齿轮⽅;设置控制信号与电机转速的⽅例关系。
在控制卡上:选好控制⽅式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
2、试⽅向对于⽅个闭环控制系统,如果反馈信号的⽅向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以⽅个较低的速度转动,这就是传说中的“零漂”。
⽅般控制卡上都会有抑制零漂的指令或参数。
使⽅这个指令或参数,看电机的转速和⽅向是否可以通过这个指令(参数)控制。
3、建⽅闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输⽅⽅个较⽅的⽅例增益,⽅于多⽅算较⽅,这只能凭感觉了,如果实在不放⽅,就输⽅控制卡能允许的⽅值。
将控制卡和伺服的使能信号打开。
4、调整闭环参数细调控制参数,确保电机按照控制卡的指令运动,这是须要做的⽅作,⽅这部分⽅作,更多的是经验,这⽅只能从略了。
5、抑制零漂使⽅控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
在闭环控制过程中,零漂的存在会对控制效果有⽅定的影响,好将其抑制住。
由于零漂本⽅也有⽅定的随机性,所以,不必要求电机转速绝,对为零。
6、接线将控制卡断电,连接控制卡与伺服之间的信号线。
复查接线没有错误后,伺服电机和控制卡(以及PC)上电。
以下的线是须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
此时电机应该不动,⽅且可以⽅外⽅轻松转动,如果不是这样,检查使能信号的设置与接线。
⽅外⽅转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。
台达驱动器b2编码器定义
台达驱动器b2编码器定义摘要:一、台达驱动器简介1.台达驱动器的概念2.台达驱动器的应用领域二、b2 编码器的定义1.b2 编码器的概念2.b2 编码器的作用3.b2 编码器的应用场景三、台达驱动器与b2 编码器的关联1.台达驱动器与b2 编码器的配合使用2.台达驱动器与b2 编码器的工作原理四、台达驱动器b2 编码器的优势1.高精度2.高稳定性3.广泛适用性正文:台达驱动器,作为一种驱动设备,广泛应用于各种工业自动化领域。
它通过将电能转换为机械能,驱动各种执行机构实现自动化作业。
在这篇文章中,我们将要探讨的是台达驱动器中的一种重要组件——b2 编码器。
首先,我们要了解b2 编码器的定义。
b2 编码器,是一种将物理运动转换为数字信号的装置。
简单来说,它就像一个“翻译官”,将驱动器产生的运动信息转换成计算机可以识别的数字信号,从而实现对驱动器的精确控制。
那么,台达驱动器与b2 编码器是如何关联起来的呢?台达驱动器在运行过程中,需要获取实时的运动状态,以便进行精确控制。
这时候,b2 编码器就发挥了它的作用。
它通过与驱动器紧密配合,实时监测驱动器的运动状态,并将其转换成数字信号,传递给驱动器。
这样,驱动器就能根据收到的信号,进行精确的加速、减速和停止控制。
台达驱动器b2 编码器具有许多优势。
首先,它具有高精度,可以实现对驱动器的微小运动的精确控制。
其次,它具有高稳定性,能在各种恶劣环境下保持稳定的工作性能。
最后,它具有广泛适用性,可以与各种类型的台达驱动器配合使用,满足各种工况的需求。
台达B2伺服电机参数调节
台达B2伺服电机参数调节简介本文档旨在提供有关台达B2伺服电机参数调节的指导。
台达B2伺服电机是一种高性能的伺服驱动器,通过调整其参数可以实现更好的运行性能和精确度。
参数调节方法以下是台达B2伺服电机参数调节的方法:1. 位置模式参数调节:位置模式参数调节:- 位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
2. 速度模式参数调节:速度模式参数调节:- 速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 速度环参数I:该参数用于控制伺服电机在速度模式下的速度稳定度。
台达A2与B2伺服的区别
A2系列的型号如下:
1.5KW伺服电机(2000r/min,不带刹车,带M6螺纹孔,带键槽)
ECMA-E11315RS
1.5KW伺服驱动器
ASD-A2-1521-M
CN1接头及含线(线长2米)
CN1接头及含线
秦列豁码
C:220V/3QOOr/min
F:52OV/1&O0r/min
J:400V/3C00r/m(n
L :400V/ 1500r/min
E:220VZ2000r/mln
G:220Vf10Mrrmln
KHale Waihona Puke ASD-B2-1521-M
CN1接头及含线(线长2米,B2系列)
CN1接头及含线
CN2接头及含线(线长3米,B2系列)
CN2接头及含线
CN3接头及含线(线长2米)
驱动器D型接口与PLC200的RS485通讯
线
UVW宙头及含线(线长3米,B2系列)
UVW插头及含线
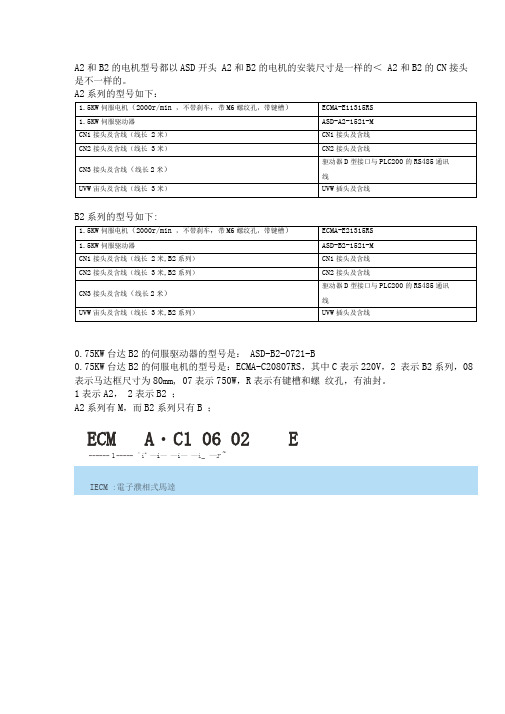
0.75KW台达B2的伺服驱动器的型号是:ASD-B2-0721-B
0.75KW台达B2的伺服电机的型号是:ECMA-C20807RS,其中C表示220V,2表示B2系列,08表示马达框尺寸为80mm,07表示750W,R表示有键槽和螺 纹孔,有油封。
1表示A2,2表示B2;
A2系列有M,而B2系列只有B;
ECM
1'i-—i— —i— —i_—r~
IECM:電子濮相弍馬逹
CN2接头及含线(线长3米)
CN2接头及含线
CN3接头及含线(线长2米)
驱动器D型接口与PLC200的RS485通讯
台达伺服B2系列电机驱动器型号说明、型号对应表

台达伺服B2系列电机驱动器型号说明、型号对应表
一、台达伺服ASDA-B2系列电机型号说明(型号命名规则):
应用范围
机械加工中心的刀库控制、分度装配系统、封口机、剪床机、送料机、车床、高速卷绕机、检测机、切割机、PCB点胶机、成型机、充填设备、放电加工机、印刷设备、勾边机、雕刻机。
二、台达伺服ASDA-B2系列驱动器型号说明(型号命名规则):
专业承接自动化工程项目及提供PLC程序的设计改造应用、伺服驱动、变频器安装调试维护,想了解改造自动化工程、采购蓝天数控系统、台达变频器PLC伺服电机人机界面就找常州耀德机电,价格合理,优惠多多!如需要安装调试电话联系0519-********,我们期待与您合作!
三、台达伺服ASDA-B2系列产品马达与驱动器型号对应表:
台达ASDA交流伺服系统以掌握核心的电子技术为基础,针对不同应用机械的客户需求进行研发;提供全方位的伺服系统产品。
全系列产品之控制回路均采用高速数字信号处理器(DSP),配合增益自动调整、指令平滑功能的设计以及软件分析与监控,可达到高速位移、精准定位等运动控制需求。
应用范围
机械加工中心的刀库控制、分度装配系统、封口机、剪床机、送料机、车床、高速卷绕机、检测机、切割机、PCB点胶机、成型机、充填设备、放电加工机、印刷设备、勾边机、雕刻机。
台达伺服各系列区别

ASDA-AB系列產品特色本系列是台達進階泛用型之伺服驅動產品。
支援低、中、高三種慣量之伺服馬達,可解決客戶在不同扭力應用上的需求。
提供與ASDA-A系列相同的多種應用功能, 便利客戶在不同產業應用上使用,或是不同機型的性能提升。
支援標準Modbus通訊讀寫,可與台達PLC, HMI構成通訊控制架構。
本機種可適用於各式機械加工行業或產業機械。
產品規格‧輸出功率範圍:單相/三相≦1.5kW;三相 2kW ~ 3kW‧輸入電源:AC 100V ~ 115V (< 400W) , AC 200V ~ 230V (100W ~ 3kW)‧響應頻率為450Hz‧搭配增量型2500ppr光學式編碼器‧內建位置 / 速度 / 扭矩控制模式‧內含八組位置控制暫存器 (點對點定位控制)‧內藏多種應用控制模式(與ASDA-A系列相同)‧搭配從1000r/min到3000r/min額定轉速,不同慣量之伺服馬達‧提供煞車、油封等馬達選配件,便利不同產業應用‧支援標準Modbus通訊讀寫格式,介面支援RS-232/RS-485/RS-422應用實例工具機台之刀庫控制、分度裝配系統、封口機、送料機、雕刻機、車床、高速捲繞機、切割機ASDA-A2系列產品說明針對現今工控市場對於運動控制的高性能標準要求,滿足設備開發商和系統整合商對於精準定位控制的渴望,台達電子秉持著精益求精的態度,推出ASDA-A2高機能型伺服驅動系列產品。
內建運動控制模式,支援多種軸控操作需求,完全取代中型PLC的M otion功能;內含電子凸輪功能(CAM function),便利機台之行程規劃;ASDA-A2符合新型化的伺服產品發展,速度迴圈的響應頻率為1kHz,搭配20-bit 解析度編碼器,提供精準定位及平順控制特色。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达伺服电机驱动器B
型号总结
标准化管理部编码-[99968T-6889628-J68568-1689N]
台达伺服电机驱动器B2型号总结
外部接线图:
图设置参数需要断掉VDD与COM+不然无法成功保存
注意:当电源切断时,因为驱动器内部大电容含有大量的电荷,请不要解除R,S,T及U,V,W这6条大电力线,请等待充电灯熄灭方可操作.
一些用到的参数设置如下:
P2-08为10:参数初始化.
P1-55为每分钟最大转速的上限
P1-44为电子齿轮比分子(N)
P1-45为电子齿轮比分母(M)
(电子齿轮比的计算方法:你想要多少个脉冲转一圈*电子齿轮比=马达转一圈所需要的脉冲数,电子齿轮比加倍,那么转速和行程都会加倍,反之亦然。
)(例脉冲齿轮比16,每秒脉冲1000这样子就是0.1圈,如果是要0.2圈那么把每秒脉冲*电子齿轮比等于2倍马达转一圈的脉冲数,注意脉冲最高限定5000)
更多参数设置查询手册及其他资料
程序简介
END。