FANUC发那科工业机器人型号M-10iA选型报价
焊接机器人、焊枪、变位机等集中选型资料

各厂家机器人、焊接电源、焊枪、变位机等规格及技术参数(选型用)a) 机器人系统1. Fanuc机器人系统M-10iA、M-10iA/6L机械手臂M-10iA性能参数负载(指第6轴最前端 P 点负载)10 公斤运动轴数6轴安装位置地面、倒装、壁挂、倾斜最大运动半径1420mm重复定位精度±0.08mm自重130kg每个轴的运动参数运动动作范围(度)速度(最大值度/秒)M-10iA、M10-iA/6L运动范围及尺寸M-20iA、M20-iA/10L机械手臂M-20iA性能参数M-20iA、M20-iA/10L运动范围及尺寸M710iC/20L机械手臂R-0iA机械手臂1)R-30iA 控制器:**B型箱体:●基本配置: B型箱体●电源输入: 380V / 3相+E●Flash ROM 模块容量: 32MB●DRAM 模块容量: 32MB●CMOS RAM 模块容量: 3MB**Mate型箱体●基本配置: Mate型箱体●电源输入: 200V / 3相+E●Flash ROM 模块容量: 32MB●DRAM 模块容量: 32MB●CMOS RAM 模块容量: 2MB**通用参数●USB存储功能●CF卡存储功能●机器人控制电缆 7米/14米/20米(柔性/非柔性)** ●示教盘电缆 10米●机器人C型支承轨道水平伺服驱动及控制电缆 7/14米(柔性)** ●机器人C型支承轨道垂直伺服驱动及控制电缆 7米(柔性)**●机器人X轴轨道伺服驱动及控制电缆 14米(柔性)**(X轴含机器人地面轨道)●机器人Y轴轨道伺服驱动及控制电缆 20米(柔性)**●机器人Z轴轨道伺服驱动及控制电缆 20米(柔性)**●变位机倾翻轴伺服驱动及控制电缆 7米(柔性/非柔性)**●变位机旋转轴伺服驱动及控制电缆 14米(柔性)**●DeviceNet 接口及 Process I/O 接口外部IO Process I/O JB(DI/DO=40/40) (高电平输出);I/O 10m 电缆, 带2块分线端子板(型号:FX-50HD/K);●备件 (保险丝等)2)机器人软件●机器人基础控制软件●基本字库:中文和英文●弧焊专用软件(ARC Tool)●数字伺服功能●操作指令功能●位置寄存器功能 (Position Register)●时间计数器功能 (Timer)●外部程序选择功能 (PNS & RSR)●TCP 自动校准功能(TorchGuard) (J681) ●高灵敏度防碰撞检测功能●DeviceNet Master interface (J753)选项:●焊缝起始点寻找(Touch Sensing) (J536) ●焊缝跟踪(TAST) (J511)●多层多道焊(Multi-Pass) (J532)●PMC (J760 ) & PMC Change Mode (R652 ) ●PAYLOAD (J669)●协调联动(Coordinate Motion) (J686)●福尼斯焊接包(R653)●HeatWave (R551 )3)示教器:●重量:1.3kg●紧急停机,热插拔●左右手操作支持●彩色中英文界面4)适用环境:1.电源要求:(1)电压AC 380V(Mate型柜AC 200V),三相四线制(相线和地线);(2)频率:50Hz ±1Hz;(3)允许波动:-10%~+10%;2.环境温度:运转时温度 0~45℃;运输及贮藏时-20~60℃;温度系数1.1℃/min。
FANUCRobotM-10iA机器人安装说明
FANUCRobotM-10iA机器人安装说明哎呀,要说这 FANUC Robot M-10iA 机器人的安装啊,那可不是一件随随便便就能搞定的事儿。
咱得一步步来,而且得特别细心,不然出了岔子可就麻烦啦!首先呢,咱们得准备好安装需要的各种工具和设备。
就像上次我给工厂安装这机器人的时候,有个小年轻工人,啥工具都没准备齐全就想动手,结果半天也没弄出个名堂,还耽误了不少时间。
所以啊,工具可不能马虎,像扳手、螺丝刀、水平仪这些,一个都不能少。
安装之前,得找一个宽敞、干净、平整的场地。
这场地就好比机器人的“家”,得舒舒服服的。
地面要结实,不能有坑坑洼洼的地方,不然机器人站不稳可就糟糕了。
接下来就是开箱检查啦,看看机器人的各个部件是不是齐全,有没有在运输途中磕着碰着。
我记得有一回,打开箱子一看,有个零件上居然有一道细微的划痕,虽然不影响使用,但心里总是觉得不太舒坦。
然后就是安装底座啦,这底座可要安装得稳稳当当的。
用水平仪好好测量测量,保证底座是水平的。
要是底座歪了,那机器人工作起来可就没准头了。
把机器人本体抬到底座上安装的时候,得几个人一起小心翼翼地操作。
动作要轻,别磕着机器人的外壳。
有一次,因为大家动作不够协调,差点把机器人给摔了,吓得我出了一身冷汗。
安装好本体,接下来就是连接各种线缆啦,像电源线、信号线等等。
这些线缆可不能接错,每一根都有它的用处。
接完之后,要仔细检查一遍,确保连接牢固,没有松动的地方。
还有那机械臂的安装,要调整好各个关节的角度和位置,让机械臂能够灵活自如地运动。
安装的时候,就感觉像是在给一个精密的“大家伙”做一次精细的“手术”。
安装完成后,可别着急启动,要先进行调试和测试。
看看机器人的动作是否准确,运行是否平稳。
这时候就得耐心观察,不放过任何一个小细节。
总之,安装 FANUC Robot M-10iA 机器人是个细致活,每一步都要认真对待,不能有丝毫马虎。
只有这样,才能让这个“大家伙”乖乖地为咱们工作,提高生产效率。
3工业机器人主要技术参数
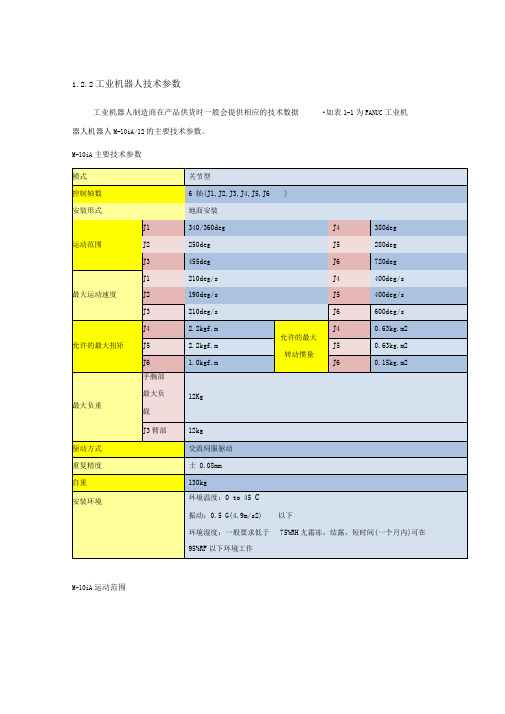
1.2.2工业机器人技术参数工业机器人制造商在产品供货时一般会提供相应的技术数据•如表1-1为FANUC工业机器人机器人M-10iA/12的主要技术参数。
M-10iA主要技术参数M-10iA运动范围M-IOrAM-10iA 机器人本体配置■■廉*Ajrri 珂呼 hM 4Di* MommM ,0iA-6L &6Qmir中心J5 axis- fMatior OiiWirR-30iB_Contorller Mate 型控制箱体(M-10iA )主控制轴卡支持最多24根轴,且可通过辅助轴卡支持最多36根轴可快速更换的放大器(小于5分钟)彩色,具网络浏览功能,易于编程且可自定义用户界面的iPendant多样的I/O连接方式针对各种应用的丰富的软件功能包R-30iB控制器配置Item /名称Specification / 配置Cab in et / 箱体R-30iB控制柜Mate柜体(三相电源)1Ma in Board / 主板Main board A(Standard) / 标准主板24 CPU Card / CPU 卡CPU card Sta ndard(DRAM 64 MB)5 FROM & SRAM Card / 内存卡64MB FROM/2MB SRAMAxes servo card /车由控制卡Axes control card 6 axes(Standard)/6 轴控制轴卡67 Servo Amplifier /伺服放大器 6 axes servo amplifier / 6 轴伺服放大器Ports for file tran sfer / 文件传输CF card in terface+USB port / CF 卡接口+USB 接口8端口9 Back Panel / 背板槽 2 slot / 2 槽Communication / 通讯Peripheral cable Direct in( DI/DO=28/24)Mai n Board 1010m(Open Air) /主板10 通讯(28 进24 出)11 Teach pendant / 示教盒iPendant with USB port /带USB接口的彩色示教盒TP cable length / TP 电缆长度10m1213 其他配置Operator's Panel En glish/3 mode/without TP disc onnect /3模式操作面板200-230V交流电源输入尽管各厂商所提供的技术参数项目是不完全一样的,工业机器人的结构、用途以及用户的要求也不同,但是,工业机器人的主要参数一般都应有:自由度、工作精度、工作范围、最大工作速度、承载能力等。
M-10iA_12_details

The Robot Experts上海发那科机器人有限公司FANUC机器人 M-10iA/12第01版 2014/11/30The Robot Experts上海发那科机器人有限公司M-10iA系列机型M-10iA 系列机器人有5种机型,可满足不同的应用需要。
中空手腕(电缆内置)高惯量手腕(电缆外置)M-10iA/12S短臂型 可达半径 1098 mm 最大负载 12 kgM-10iA/12标准臂型 可达半径 1420 mm 最大负载 12 kgM-10iA/7L长臂型 可达半径 1632 mm 最大负载 7 kgM-10iA/10MS短臂型 可达半径 1101 mm 最大负载 10 kgM-10iA/10M标准臂型 可达半径 1420 mm 最大负载 10 kg-1-The Robot Experts上海发那科机器人有限公司M-10iA/12 特性手腕部可搬运质量增至12 kg 通过采用高刚性手臂和先进的伺服技术,提高了加 速度性能,缩短了动作时间,从而实现了高生产率 手腕轴采用了独特的驱动机构,实现了中空结构手腕 具有电缆配线专用软导管(选项)可供选用 可使用ROBOGUIDE进行离线编程,从而缩减示教时间M-10iA/12配置内置视觉或力传感器后,可使用智能应用功能-2-The Robot Experts上海发那科机器人有限公司负载和速度的提升M-10iA 手腕部最大负载 [kg] 可达半径[mm] J1 J2 最高速度 [deg/sec] J3 J4 J5 J6 手腕允许负载 转矩 [Nm] 手腕允许负载 惯量 [kgm2] J4 J5 J6 J4 J5 J6 10 1,420 210 190 210 400 400 600 22.0 22.0 9.8 0.63 0.63 0.15 M-10iA/12 12 1,420 230 225 230 430 430 630 22.0 22.0 9.8 0.65 0.65 0.17 ‐ ‐ 3% ↑ 13% ↑-3-提升比例 20% ↑ ‐ 10% ↑ 18% ↑ 10% ↑ 8% ↑ 8% ↑ 5% ↑The Robot Experts上海发那科机器人有限公司搬运能力提高机床上下料动作J6 180 deg 150 mm 750 mm CNT 0CNT 0J6轴旋转运动J6 180 deg 175 mmCNT 0J6 360 degCNT 0M-10iA5.90 秒M-10iA1.90 秒减少 9%M-10iA/12 5.38 秒 M-10iA/12减少13%1.65 秒-4-The Robot Experts上海发那科机器人有限公司应用示例小型工件的散堆拾取(带视觉)外壳工件的抛光打磨(带力传感器)-5-The Robot Experts上海发那科机器人有限公司应用示例汽车零部件的焊接-6-The Robot Experts上海发那科机器人有限公司规格型号 机构 控制轴数 可达半径 安装方式 M-10iA/12 多关节型机器人 6 轴(J1,J2,J3,J4,J5,J6) 1420 mm 地面安装、倒吊安装、倾斜安装 J1 J4 340º/360º (230º/s) 380º (430º/s) J2 J5 250º (225º/s) 380º (430º/s) 2000 mm/s 12 kg 12 kg J4 J4 22 Nm 0.65 kgm² J5 J5 22 Nm 0.65 kgm² 交流伺服电机驱动 ± 0.08 mm 130 kg 2 kVA ( 1 kW ) 环境温度 : 0 ~ 45⁰C 环境湿度 : 通常在75% RH以下(无结露现象),短期在95% RH以下(1个月之内) 振动加速度: 4.9 m/s² (0.5G)以下 注释1)如采用倾斜安装方式,机器人J1轴和J2轴的运动范围将受到限制。
KUKA机器人简介
• (2)LR Mate 系列(串联机器人)。 • 人手臂大小的万能迷你智能机器人。最大负重4kg-7kg,可达半径4mm-
892mm
三、KUKA机器人简介
• 机器人技术之先驱库卡机器人集团公司(KUKA Robot Group)是世界领先的 工业机器人供应厂家之一。 库卡是世界几家顶级为自动化生产行业提供柔性 生产系统,机器人,夹具,模具及备件的供应商之一。库卡的客户几乎遍及所 有的汽车生产厂家。同时也是欧洲,北美洲,南美洲及亚洲的主要汽车配件及 综合市场的主要供应商。库卡可提供全套系列的工业机器人和机器人系统,涵 盖了所有负载等级和机器人类型,例如:各种规格的六轴机器人, 货盘堆垛机 器人, 龙门架机器人, 净室机器人, 不锈钢机器人, 耐高温机器人, SCARA 机器 人或焊接机器人。
• (5)堆垛、卸垛机器人 KR 50 PA。无论是货盘堆垛还是 货盘卸垛,无论是混合货品还是非混合货品,无论是纸箱 还是塑料容器 - KR 50 PA 都能满足它们的作业要求。负荷 50 千克,附加负荷 20 千克 ,最大作用范围1991 毫米 , 轴数2 ,复精确度 <±0.25 毫米,量700 千克,安装位置 :地面。
四、FANUC机器人简介
• 日本发那科株式会社,主营工厂自动化设备及机器人,产 品范围:CNC系统、伺服电机、机器人、智能注塑机、智 能线切割机、智能钻削中心、超精密加工机和激光器。上 海发那科机器人有限公司1997年12月 成立。面向汽车、汽 车零部件、一般产业的中小规模系统,实施从设计到施工 的服务。拥有点焊、弧焊、涂胶、冲压、涂装、码垛、搬 运等系统工程的销售实绩。
fanuc部件资料

2.7.1.发那科机器人M-10iA弧焊机器人●M-10iA型机器人为紧凑型机器人,在界内被誉为内装式电缆的拥有最纤细手臂的弧焊机器人,从而简易了在狭小空间内的焊接操作。
●焊枪电缆与手臂综合一体化,专业机器人送丝机安装在机器人手臂上,焊接电缆线内置在手臂中,手臂动作更加自由无束缚,可以提供最大工作范围。
●高强度的手臂以及最先进的伺服驱动技术提高了各轴最大运行速度和加速性能,从而缩短了超过15%的焊接生产时间,实现了世界上最高速的生产性能。
●一体式焊接设备配有可选的焊接电源,同时支持一体式管路和标准式管路。
M-10iA(即AM100iC)的技术规格2.7.2.机器人控制柜机器人控制柜:R-30iA –B箱体。
●R-30iA系统控制可以在一个单机系统或多机系统上实现简单和柔性的控制;●开放式结构可以集成传感器的硬件,可以提高应用和运动性能,并简化系统的集成●示教盘为彩屏,大且容易观察,配备10m的柔性电缆;●3M的RAM储存空间,供存储示教程序 (TP Program),记录示教位置数据等;●系统具有四层密码设置保护功能;2.7.3.系统控制本项目采用机器人控制柜自带的PMC进行逻辑控制,对机器人、夹具、触摸屏、操作按钮和指示灯、安全光栅和安全门开关等各种外设的通讯工作;Proface 5.7寸蓝白触摸屏编制良好的人机界面,完成生产管理、状态管理和维护管理等工作;通过该界面可以设置电磁气阀的使用或禁用。
本项目中维护门上设置安全开关,若有人通过安全门进入机器人工作区,机器人将处于暂停状态。
2.7.4.焊接电源采用林肯CV350-R焊接电源。
CV350-R是数字式控制的焊接电源,广泛应用于机器人和自动化领域;CV350-R和机器人进行交流,所有的焊接工艺和程序可以通过和机器人的接口进行通讯协议;一个中央控制器完成设置、工艺控制和诊断。
∙30KHz频率的逆变技术,高功率因数,高效率;∙通过机器人示教盘可完成所有参数的设置,焊机上没有也不需要手动控制;∙与FANUC机器人完美结合,与机器人采用高性能通讯协议ArcLink™通讯。
工业机器人发展史简述
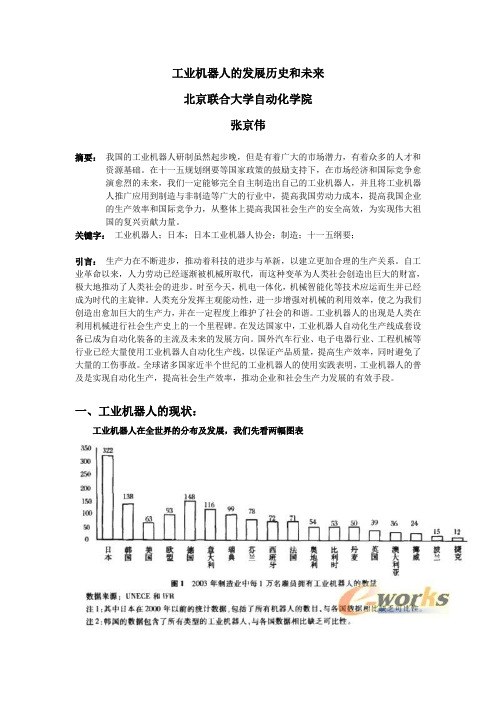
工业机器人的发展历史和未来北京联合大学自动化学院张京伟摘要:我国的工业机器人研制虽然起步晚,但是有着广大的市场潜力,有着众多的人才和资源基础。
在十一五规划纲要等国家政策的鼓励支持下,在市场经济和国际竞争愈演愈烈的未来,我们一定能够完全自主制造出自己的工业机器人,并且将工业机器人推广应用到制造与非制造等广大的行业中,提高我国劳动力成本,提高我国企业的生产效率和国际竞争力,从整体上提高我国社会生产的安全高效,为实现伟大祖国的复兴贡献力量。
关键字:工业机器人;日本;日本工业机器人协会;制造;十一五纲要;引言:生产力在不断进步,推动着科技的进步与革新,以建立更加合理的生产关系。
自工业革命以来,人力劳动已经逐渐被机械所取代,而这种变革为人类社会创造出巨大的财富,极大地推动了人类社会的进步。
时至今天,机电一体化,机械智能化等技术应运而生并已经成为时代的主旋律。
人类充分发挥主观能动性,进一步增强对机械的利用效率,使之为我们创造出愈加巨大的生产力,并在一定程度上维护了社会的和谐。
工业机器人的出现是人类在利用机械进行社会生产史上的一个里程碑。
在发达国家中,工业机器人自动化生产线成套设备已成为自动化装备的主流及未来的发展方向。
国外汽车行业、电子电器行业、工程机械等行业已经大量使用工业机器人自动化生产线,以保证产品质量,提高生产效率,同时避免了大量的工伤事故。
全球诸多国家近半个世纪的工业机器人的使用实践表明,工业机器人的普及是实现自动化生产,提高社会生产效率,推动企业和社会生产力发展的有效手段。
一、工业机器人的现状:工业机器人在全世界的分布及发展,我们先看两幅图表UNECE估计,2004年全球至少安装了10万台新的工业机器人。
其中:欧盟31 100台(比2003年增加15%,但比2001年的记录仅增加1%);北美16 100台(比2003年增加27%,比2000年的记录高24%);亚洲51 400台,主要在日本,但中国市场增长迅速(比2003年增长24%)。
发那科机器人

发那科机器人设备一览表:郑州优百特焊割设备有限公司日期:2009年5月12日供货单位名称型号数量单价合计备注10i ARC MATE 机器人本体 FANUC 机器人控制器 R-J3iC FANUC示教盒 FANUC操作盒 FANUC 机器人控制电 FANUC缆继电器装置 FANUC 割炬夹持器 BINZEL 氧气减压器 NO.155MX-200 捷锐丙烷减压器 NO.155MF-40 捷锐回火阀 NO.22-FA30PF 捷锐面板式减压器捷锐铜接管等附件捷锐割炬装置 MCT240 捷锐自动点火器捷锐电磁阀气管合计可选设备一览表备注机器人有效工作半径经使用现场了解,大多数工件都R=3000 mm 小于4米长,从数量上来说,小工件占比例较大,建议采购切割机器人系最大工件长度×宽度统时,兼顾大小工件,可按比例选用5500mm×700mm 适合的机器人系统,即可节省设备成本,同时也增加了机器人动作运行的100iB ARC MATE稳定性。
机器人加长运动范围是以牺机器人有效工作半径牲位置反复精度为代价的,长臂机器R=,,,, mm人的位置反复精度要低于?,.,mm 最大工件长度×宽度2400mm×600mm机器人切割工作站一、设备名称:FANUC 10iB ARC MATE机器人切割工作站二、加工对象:坡口切割有效切割尺寸范围:3米机器人( 5500 mm X700mm)2米机器人( 3500 mm X600mm)1.4米机器人( 2500 mm X600mm)三、切割方式:该机器人站采用双工位布局方式。
当机器人在a工位切割时,另一b工位操作人员可以进行装卸工件。
切割方式:氧炔焰切割,采用上海捷锐公司割炬装置。
设备组成简图如下:四、供货清单:序号名称数量生产厂家1 FANUC 120iB/10L ARC MATE机器人本体 1 FANUC2 机器人控制器及示校编程器 1 FANUC3 火焰切割气路系统 1 捷锐4 安装底座 1 FANUC5 工作平台 2 选配6 简易护栏 1 选配7 自动点火装置 1 捷锐8 电气控制系统 19 捷锐火焰割炬装置 1 五、安全要求1. 用户使用的气体,零配件必须符合国家的有关标准。
机器人价格表
机器人价格表价格是我们购买商品时最关注的一个因素之一。
在选择购买机器人时,价格也是我们需要考虑的重要因素之一。
本文将为您提供一份机器人价格表,以帮助您了解不同类型机器人的价格范围,并为您选择适合的机器人提供参考。
一、家用机器人1. 扫地机器人- 品牌A:599元 - 799元- 品牌B:899元 - 1399元- 品牌C:1499元 - 1999元2. 智能音箱机器人- 品牌A:499元 - 699元- 品牌B:799元 - 999元- 品牌C:1099元 - 1499元3. 智能摄像机器人- 品牌A:699元 - 999元- 品牌B:1099元 - 1499元- 品牌C:1599元 - 1999元二、工业机器人1. 自动化装配机器人- 品牌A:10万元 - 30万元 - 品牌B:30万元 - 50万元 - 品牌C:50万元 - 80万元 2. 搬运机器人- 品牌A:20万元 - 50万元 - 品牌B:50万元 - 80万元 - 品牌C:80万元 - 120万元 3. 焊接机器人- 品牌A:30万元 - 60万元 - 品牌B:60万元 - 100万元 - 品牌C:100万元 - 150万元三、服务机器人1. 餐饮服务机器人- 品牌A:10万元 - 20万元 - 品牌B:20万元 - 30万元- 品牌C:30万元 - 50万元2. 医疗服务机器人- 品牌A:50万元 - 80万元- 品牌B:80万元 - 120万元- 品牌C:120万元 - 200万元3. 客服服务机器人- 品牌A:10万元 - 30万元- 品牌B:30万元 - 50万元- 品牌C:50万元 - 80万元请注意,以上价格仅供参考,实际价格可能会因市场供需、品牌影响等因素而有所波动。
同时,不同品牌的机器人在性能、功能、售后服务等方面也会有所差异。
购买机器人时,建议您根据自身需求和预算,在多个品牌中进行综合评估和比较,选择最适合的机器人产品。
发那科FANCIαi伺服电机型号参数(精)

Motor ModelαiF 1/5000αiF 2/5000αiF 4/4000αiF 8/3000αiF 12/3000Rated output(kw0.50.751.41.63Stallingtorque(Nm124812Max.speed(r/min50005000500030003000Rotor intertia(kgm2 0.000310.000530.00140.00260.0062Driver(αi SV80Specification A06B-0202-Bxyz A06B-0205-Bxyz A06B-0223-Bxyz A06B-0227-Bxyz A06B-0243-BxyzMotor ModelαiF 22/3000αiF 30/3000αiF 40/3000Rated output(kw476Stallingtorque(Nm223038Max.speed(r/min300030003000Rotor intertia(kgm2 0.0120.0170.022Driver(αi SV80SpecificationA06B-0247-BxyzA06B-0253-BxyzA06B-0257-BxyzNote2:Straight shaft with key way 3:Taper shaft,with breakA06B-0257-Bxyzx :0:Taper shaft 1:Straight shaft1: with Fan (only for aiF 40 2: with High-Torque Brake *14:Straight shaft,with break5:Straight shaft with key way,with breaky :0: standardz :0:Pulsecoder aiA1000 1:Pulsecoder aiI1000 2:Pulsecoder aiA160003: with High-Torque Brake , with Fan *1 *1: "x" should be from 3 to 5αiF 伺服电机简明规格参数20401609533000αiF 40/3000i with fan0.022FANUC伺服电机按驱动电压可分为高压电机(400VHV和低压电机(200V;按产品系列可以分αi系列和βiS系列两大类;这两大系列伺服电机又依次可以分为αiF、αiS、αiF(HV、αiS(HV和βiS、βiS(HV等子类。
FANUC外部附加轴配置实例--

FANUC外部附加轴配置实例智能控制部-机器人室2016/07/20 V1.0目录1.硬件准备 (2)2.软硬件安装 .......................................................................................................... 错误!未定义书签。
3.通信设置1—FANUC进入控制模式—信号清零 (4)4.通信设置2—FANUC进入控制模式—选择制造商.............................................. 错误!未定义书签。
5.通信设置3—信号分配......................................................................................... 错误!未定义书签。
6. 通信设置4—两个信号置反................................................................................ 错误!未定义书签。
7. 通信设置5—信号显示设置................................................................................ 错误!未定义书签。
8. 通信设置6—机器人IP设置.............................................................................. 错误!未定义书签。
9. 通信设置7—IP设置.......................................................................................... 错误!未定义书签。
M-10iA_6L Mate配置及参数
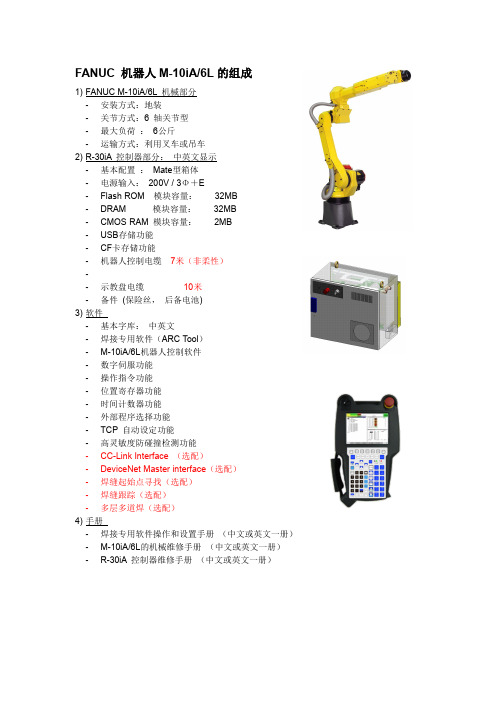
FANUC机器人M-10iA/6L的组成1)FANUC M-10iA/6L机械部分-安装方式:地装-关节方式:6轴关节型-最大负荷:6公斤-运输方式:利用叉车或吊车2)R-30iA控制器部分:中英文显示-基本配置:Mate型箱体-电源输入:200V/3Φ+E-Flash ROM模块容量:32MB-DRAM模块容量:32MB-CMOS RAM模块容量:2MB-USB存储功能-CF卡存储功能-机器人控制电缆7米(非柔性)--示教盘电缆10米-备件(保险丝,后备电池)3)软件-基本字库:中英文-焊接专用软件(ARC Tool)-M-10iA/6L机器人控制软件-数字伺服功能-操作指令功能-位置寄存器功能-时间计数器功能-外部程序选择功能-TCP自动设定功能-高灵敏度防碰撞检测功能-CC-Link Interface(选配)-DeviceNet Master interface(选配)-焊缝起始点寻找(选配)-焊缝跟踪(选配)-多层多道焊(选配)4)手册-焊接专用软件操作和设置手册(中文或英文一册)-M-10iA/6L的机械维修手册(中文或英文一册)-R-30iA控制器维修手册(中文或英文一册)机器人型号Robot modelM-10iA/6L 轴数Controlled axes6axes 最大运动半径Max.reach1632mm 有效运动范围Stroke1154mm 最大负载Max.load capacity at wrist6kg运动范围Motion range J1 5.93rad(340deg) J2 4.36rad(250deg) J37.80rad(447deg) J4 6.63rad(380deg) J5 6.63rad(380deg) J612.57rad(720deg)最大运动速度Max.speedJ1 3.67rad/s(210deg/s)J2 3.32rad/s(190deg/s)J3 3.67rad/s(210deg/s)J4 6.98rad/s(400deg/s)J5 6.98rad/s(400deg/s)J610.47rad/s(600deg/s)重复精度Repeatability±0.1mm 机械本体重量Mechanical unit mass130kg运动范围底座尺寸法兰尺寸送丝机安装位置及重量限制。
发那科

存货名称规格型号主计备注单价税率含税单价电池A06B-6114-K504个273.504317320伺服优化卡A15B-0001-C106个1052.991171232伺服电机BIS-22/2000A06B 0085-B103套5702.564176672发那科 FANUC 0i MD XY电机aiF12/3000 Y电机aiF22B/3000 绝对编码器主轴ai8/12000 立式安装套10000017117000电缆A02B-0124-K830#L-7M条41.025641748 I/O LINK 线A02B-0120-K842#L-7M条123.076917144电缆(NC-SPM)A02B-0200-K810#L-7M条123.076917144主轴电机编码器反馈线A06B-6078-K811#L-7M条205.128217240 MPG电缆A02B-0120-K847#L-6M条136.752117160电池A06B-6114-K504个A98L-0031-0025273.504317320反馈线A660-2005-T505#L-7M条164.102617192电池盒A06B-6114-K506个A230-0604-T10995.726517112插座A63L-0001-0726#041KMXY个17.094021720发那科 FANUC oiMate-TD bis22B/2000+biI12/8000 SP套55555.561765000发那科 FANUC oi Mate-TD bis22B/2000+bis22/2000+biI12/8000 SP套57264.961767000发那科 FANUC 0i MD 主β8(7.5/11) XYβ12(1.8) Zβ12(1.8)闸绝对KMC-650/L650/L650H/SL660/850/850C/L850/L850H套70256.411782200发那科 FANUC 0i Mate-MD 主Bi8/10000prm X、Y、Z轴Bis12/3000 Z轴带抱闸绝对KMC-850套57948.721767800发那科 FANUC 0i Mate-MD 主BiI12/10000prm 11KW X、Y、Z轴Bis22/2000/2.5KW套58632.481768600发那科 FANUC 0i Mate-MD 主BiI12/10000prm 11KW X、Y、Z轴Bis22/2000/2.5KW (系统带第四轴功能)套61196.581771600第四轴电机及驱动(FANUC)β22个15897.441718600发那科 FANUC 0i MD 主α18/7000(18.5/22) X、Zα30(7.0) Yα40(6.0KW)Z抱闸KMC-1890套111965.817131000发那科 FANUC 0i Mate-MD 主β6(5.5/7.5) XYβ8(1.2) Zβ12(1.8)抱闸绝对KMC-545/550钻攻机专用,垂直面板套54017.091763200发那科 FANUC 0i MD 主β12/8000(11/15) XYZβ22/2000(2.5)带抱闸KMC-1060/SL1062/1150套75641.031788500法那科 FANUC 0I MD biI8/10000 SP+biS12/3000*3+第四轴 biS8/3000锥轴套系统¥81700.00+第四轴¥80940.171794700FANUC发那科 FANUC 0i Mate-MD β12(1.8) 绝对KMC-650/L650/SL660/850/850C/L850套56837.611766500发那科 FANUC 0i Mate-MD 主β12/8000(11/15) XYZβ22/2000(2.5)KMC-1060/SL1062/1150套58632.481768600电池A06B-6114-K504(A98L-0031-0025)个280.341917328电池盒A06B-6114-K506(A230-0604-T109)个95.726517112βI主轴电机规格说明书(β-65312EN)FANUC ACSPINDLE MOTOR bi seriesDESCRIPTIONS本68.376071780βIS电机规格说明书(β-65302EN)FANUC ACSERVO MOTOR bi seriesDESCRIPTIONS本119.658117140发那科 FANUC oi MD 主β8(7.5/11) XYβ12(1.8) Zβ12(1.8)闸 (带数据服务器功能)绝对KMC-650/L650/L650H/SL660/850/850C/L850/L850H套78803.421792200键盘(含键膜)A86L-0001-0298(A98L-0005-0252)套294.017117344发那科 FANUC 0i MD 主α18/7000(18.5/22) X、Zα30(7.0) Yα40(6.0KW)Z抱闸KMC-1890套111965.817131000发那科系统第四轴追加软件四轴套2564.103173000发那科 FANUC 0i Mate-MD 主Bi8/10000prm X、Y、Z轴Bis12/3000 Z轴带抱闸绝对KMC-850套57948.721767800上端灰色盖A230-0604-T104个27.350431732黄色壳A230-0604-X001个95.726517112黄色壳A230-0604-X002个47.863251756电机及驱动第四轴β8锥轴 FANUC套11111.111713000发那科 FANUC 0i MD αiF12/3000*3+αiI8/12000SP(不带抱闸)套94017.0917110000主轴位置编码器(配插头)A860-0309-T352 法那克套3206.838173752伺服优化卡A15B-0001-C106个1052.991171232电缆A15L-0001-0077#K1(配伺服优化卡)条143.589717168卡座A66L-2050-0025#A(发那科)个177.777817208液晶显示器(发那科)8.4英寸彩色TFTS HARP台2953.846173456发那科光纤A66L-6001-0026#L7R003条389.743617456电机及驱动(含第四轴功能)第四轴 β8光直轴 FANUC台11111.111713000电池A06B-6114-K504个280.341917328主轴电机A06B-1445-B103(法那科)台Β6/10000Z法兰后排气9442.7351711048电缆A15L-0001-0077#K1(配伺服优化卡)条150.427417176发那科 FANUC 0i Mate-MD β12(1.8)闸绝对KMC-650/L650/L650H/SL660/850/850C/L850/L850H套前价格错56837.611766500发那科 FANUC 0i Mate-MD 主β8(7.5/11) XYβ12(1.8) Zβ12(1.8) 绝对KMC-650/L650/SL660/850/850C/L850套前价格错55726.51765200键膜(七个键)OI MATE-TC系统用条82.051281796卡座A66L-2050-0029#A个287.179517336 FANUC 0i mate md(带第四轴功能+电机和驱动)βiS12/3000*3+βiI8/10000+βis8/3000套69401.711781200发那科 FANUC 0i MD 主α18/7000(18.5/22) X、Zα30(7.0) Yα40(6.0KW)Z抱闸KMC-1890套119658.117140000发那科 FANUC 0i MD 主α15/7000(15/18.5) 三轴α22/3000(4.0KW)Z轴抱闸KMC-SL1260/1270/1370套105128.217123000FANUC 0i mate mdβiS12/3000*3+βiI8/10000套L850系统55726.51765200发那科 FANUC 0i MD XY电机aiF12/3000 Z电机aiF22B/3000(Z轴带抱闸) 绝对编码器主轴ai8/12000 立式安装套10000017117000发那科 FANUC 0i MD XY电机aiF12/3000 Z电机aiF22B/3000(Z轴带抱闸) 绝对编码器主轴ai8/12000 立式安装+A轴aiF4/4000(锥轴)套116239.317136000。
FANUC机器人最新选型资料
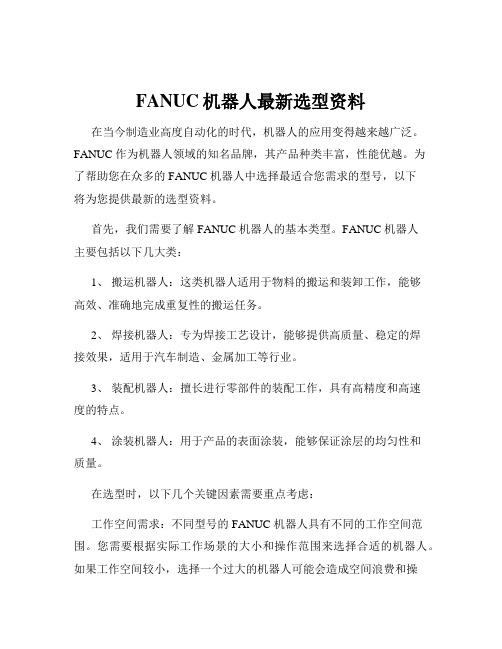
FANUC机器人最新选型资料在当今制造业高度自动化的时代,机器人的应用变得越来越广泛。
FANUC 作为机器人领域的知名品牌,其产品种类丰富,性能优越。
为了帮助您在众多的 FANUC 机器人中选择最适合您需求的型号,以下将为您提供最新的选型资料。
首先,我们需要了解 FANUC 机器人的基本类型。
FANUC 机器人主要包括以下几大类:1、搬运机器人:这类机器人适用于物料的搬运和装卸工作,能够高效、准确地完成重复性的搬运任务。
2、焊接机器人:专为焊接工艺设计,能够提供高质量、稳定的焊接效果,适用于汽车制造、金属加工等行业。
3、装配机器人:擅长进行零部件的装配工作,具有高精度和高速度的特点。
4、涂装机器人:用于产品的表面涂装,能够保证涂层的均匀性和质量。
在选型时,以下几个关键因素需要重点考虑:工作空间需求:不同型号的 FANUC 机器人具有不同的工作空间范围。
您需要根据实际工作场景的大小和操作范围来选择合适的机器人。
如果工作空间较小,选择一个过大的机器人可能会造成空间浪费和操作不便;反之,如果工作空间较大,选择一个工作范围不足的机器人则无法完成任务。
负载能力:这是选型时的一个重要指标。
不同的生产任务对机器人的负载能力要求不同。
例如,搬运较重的物料就需要选择负载能力较大的机器人,而对于一些轻型装配工作,较小负载能力的机器人可能就足够了。
精度要求:如果您的生产任务对精度要求很高,比如在电子制造行业中进行精细零部件的装配,那么就需要选择具有高精度性能的FANUC 机器人。
运动速度:对于生产效率要求较高的生产线,机器人的运动速度就显得尤为重要。
快速的运动速度可以缩短生产周期,提高产量。
编程和操作的便捷性:一个易于编程和操作的机器人可以大大降低培训成本和使用难度。
FANUC 提供了多种编程方式和操作界面,您可以根据自身的技术水平和人员情况选择合适的型号。
环境适应性:某些工作环境可能存在高温、潮湿、粉尘等恶劣条件。
(日)FANUC发那科-上海发那科(FANUC)

2.机器人的用途Arc welding(弧焊),Spot welding(点焊),Handing(搬运),Sealing(涂胶),Painting(喷漆),去毛刺,切割,激光焊接.测量等.3.FANUC机器人的型号主要型号:型号轴数手部负重(kg)LR Mate 100iB/120iB 5 3/3ARC Mate 100iB/M-6iB 6 6/6Roboweld 100iB 6 6R-2000iF/iW 6 165/2004.机器人的主要参数1)手部负重2)运动轴数3)2,3轴负重4)运动范围5)安装方式6)重复定位精度7)最大运动速度5.FANUC机器人的安装环境1)环境温度:0-45摄氏度2)环境湿度:普通:75%RH短时间:85%(一个月之内)3)振动:≤0.5G(4.9M/s2)6.FANUC机器人的编程方式1)在线编程2)离线编程7.FANUC机器人的特色功能1)High sensitive collision detector 高性能碰撞检测机能,机器人无须外加传感器,各种场合均适用2)Soft float 软浮动功能用于机床工件的安装和取出,有弹性的机械手.3)Remote TCP二.FANUC机器人的构成1.FANUC机器人软件系统Handling Tool 用于搬运Arc Tool 用于弧焊Spot Tool 用于点焊Sealing Tool 用于布胶Paint Tool 用于油漆Laser Tool 用于激光焊接和切割2.FANUC机器人硬件系统1)基本参数:马达交流伺服马达CPU 32位高速输入电源R-J3IB 380伏/3相:R-J3IB Mate380伏/3相I/O 设备Process I/O, Module A,B 等2)单机形式:(见图1)3)机器人系统构成(见图2)`4)机器人控制器硬件(见图3)一体化(标准)分离型(天吊,壁挂等情况)分离型B 尺寸(大型)柜(3轴以上的附加轴控制。
FANUC机器人选型价格浅析
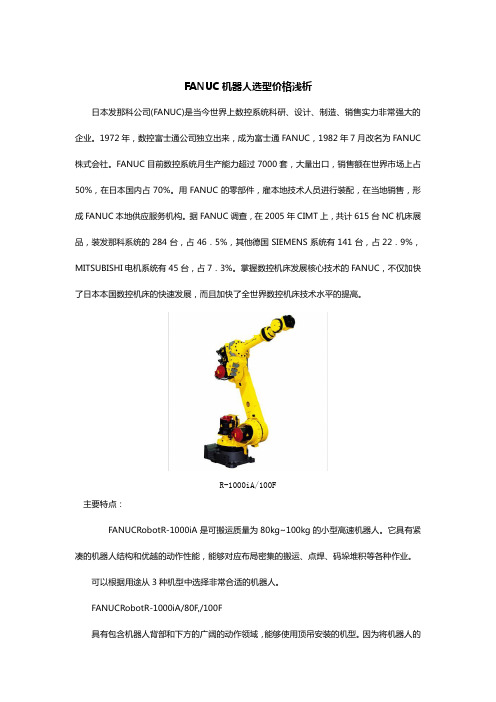
FANUC机器人选型价格浅析日本发那科公司(FANUC)是当今世界上数控系统科研、设计、制造、销售实力非常强大的企业。
1972年,数控富士通公司独立出来,成为富士通FANUC,1982年7月改名为FANUC 株式会社。
FANUC目前数控系统月生产能力超过7000套,大量出口,销售额在世界市场上占50%,在日本国内占70%。
用FANUC的零部件,雇本地技术人员进行装配,在当地销售,形成FANUC本地供应服务机构。
据FANUC调查,在2005年CIMT上,共计615台NC机床展品,装发那科系统的284台,占46.5%,其他德国SIEMENS系统有141台,占22.9%,MITSUBISHI电机系统有45台,占7.3%。
掌握数控机床发展核心技术的FANUC,不仅加快了日本本国数控机床的快速发展,而且加快了全世界数控机床技术水平的提高。
R-1000iA/100F主要特点:FANUCRobotR-1000iA是可搬运质量为80kg~100kg的小型高速机器人。
它具有紧凑的机器人结构和优越的动作性能,能够对应布局密集的搬运、点焊、码垛堆积等各种作业。
可以根据用途从3种机型中选择非常合适的机器人。
FANUCRobotR-1000iA/80F,/100F具有包含机器人背部和下方的广阔的动作领域,能够使用顶吊安装的机型。
因为将机器人的横向宽度减小到了极限,所以可以贴近邻接的机器人、夹具或者工件进行安装。
从待机位置到工作位置的高速移动,以及短距离移动时的快速定位的动作特性缩短了机器人的作业时间。
FANUCRobotR-1000iA/80H具有搬运能力强的特点、很适合进行袋装物品的高速码垛堆积的5轴机器人。
因为机构部很紧凑,所以能够有效地利用车间里有限的空间进行安装。
通过和iRVision(内置视觉功能)或者力觉传感器进行配套,可以使用新的智能化功能。
产品应用:点焊、物流搬运、码垛、材料加工、机床上下料、拾取、包装、装配工博士机器人品质保证严格细致的质量把控工博士保证每一台机器人运输前的质量合格,无磨损划痕审核流程确保型号、预算准确工博士机器人根据客户提供的参数或是型号要求,详细列出清单并根据客户预算需求精准推荐机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FANAUC发那科工业机器人型号M-10iA选型报价日本发那科公司(FANUC)是当今世界上数控系统科研、设计、制造、销售实力最强大的企业。
1972年,数控富士通公司独立出来,成为富士通FANUC,1982年7月改名为FANUC株式会社。
FANUC目前数控系统月生产能力超过7000套,大量出口,销售额在世界市场上占50%,在日本国内占70%。
用FANUC的零部件,雇本地技术人员进行装配,在当地销售,形成FANUC 本地供应服务机构。
据FANUC调查,在2005年CIMT上,共计615台NC机床展品,装发那科系统的284台,占46.5%,其他德国SIEMENS系统有141台,占22.9%,MITSUBISHI 电机系统有45台,占7.3%。
掌握数控机床发展核心技术的FANUC,不仅加快了日本本国数控机床的快速发展,而且加快了全世界数控机床技术水平的提高。
M-10iA
发那科工业机器人型号ARC Mate 100iC M-10iA/12
工博士机器人参考报价:系统集成+上门安装调试+售后培训服务交钥匙服务价格17万6
应用领域:弧焊、装配、拾取及包装、机床上下料、材料加工、码垛、物流搬运、点焊
负载:12kg
发那科M-10iA最大负重7-12kg可达半径1098mm1632mm多功能智能小型机器人应用于:
弧焊,装配,拾取及包装,机床上下料,码垛,物流搬运,点焊
工博士机器人品质保证
严格细致的质量把控
工博士保证每一台机器人运输前的质量合格,无磨损划痕
审核流程确保型号、预算准确
工博士机器人根据客户提供的参数或是型号要求,详细列出清单并根据客户预算需求精准推荐机器人。
工博士机器人还会提供给客户机器人样机操作视频,让客户能够对机器人工作效果有更直观的认识。
优质的售后保障服务
工博士机器人同时具有培训,维修,调试,上门安装服务!
购买完机器人无需担心员工不会操作!凡是在工博士购买机器人即送免费机器人培训课程名额!在工博士购买机器人还支持上门安装服务!
关于工博士集团
工博士集团是一家为智能工厂提供一站式服务的运营商,集工厂工业品一站式采购、工厂设备维护保养、工厂机器人自动化解决方案、高级工程师人才培训于一体的产业生态平台。
集团拥有软件著作权、专利、高新技术等社会科技奖项108项,独创的互联网平台与ERP系统,工业自动化以及机器人技术荣获多项科技成果。
并与上海交通大学、哈尔滨工业大学、清华大学、中国石油大学、东华大学等已达成深入合作。
在全国拥有众多分支及加盟机构,5处物流仓库,为了更好的整合产业链和提升客户服务,先后在北京、广东、湖南、江苏等主要城市成立了本地化企业和办事处。
并设立了六大技术服务中心,为客户提供直接周到的优质服务。
集团有覆盖全国主要工业城市的营销网络,服务于国内主要区域的电气自动化产品客户群体,与世界著名工业自动化产品厂商保持长期稳定的合作关系,从底层的检测、执行元件到作为基础控制层的PLC、DCS、智能化仪表,再到自动化的工业网络集成,可以为用户提供全面的一站式服务。
出师表
两汉:诸葛亮
先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
然侍卫之臣不懈于内,忠志之士忘身于外者,盖追先帝之殊遇,欲报之于陛下也。
诚宜开张圣听,以光先帝遗德,恢弘志士之气,不宜妄自菲薄,引喻失义,以塞忠谏之路也。
宫中府中,俱为一体;陟罚臧否,不宜异同。
若有作奸犯科及为忠善者,宜付有司论其刑赏,以昭陛下平明之理;不宜偏私,使内外异法也。
侍中、侍郎郭攸之、费祎、董允等,此皆良实,志虑忠纯,是以先帝简拔以遗陛下:愚以为宫中之事,事无大小,悉以咨之,然后施行,必能裨补阙漏,有所广益。
将军向宠,性行淑均,晓畅军事,试用于昔日,先帝称之曰“能”,是以众议举宠为督:愚以为营中之事,悉以咨之,必能使行阵和睦,优劣得所。
亲贤臣,远小人,此先汉所以兴隆也;亲小人,远贤臣,此后汉所以倾颓也。
先帝在时,每与臣论此事,未尝不叹息痛恨于桓、灵也。
侍中、尚书、长史、参军,此悉贞良死节之臣,愿陛下亲之、信之,则汉室之隆,可计日而待也。
臣本布衣,躬耕于南阳,苟全性命于乱世,不求闻达于诸侯。
先帝不以臣卑鄙,猥自枉屈,三顾臣于草庐之中,咨臣以当世之事,由是感激,遂许先帝以驱驰。
后值倾覆,受任于败军之际,奉命于危难之间,尔来二十有一年矣。
先帝知臣谨慎,故临崩寄臣以大事也。
受命以来,夙夜忧叹,恐托付不效,以伤先帝之明;故五月渡泸,深入不毛。
今南方已定,兵甲已足,当奖率三军,北定中原,庶竭驽钝,攘除奸凶,兴复汉室,还于旧都。
此臣所以报先帝而忠陛下之职分也。
至于斟酌损益,进尽忠言,则攸之、祎、允之任也。
愿陛下托臣以讨贼兴复之效,不效,则治臣之罪,以告先帝之灵。
若无兴德之言,则责攸之、祎、允等之慢,以彰其咎;陛下亦宜自谋,以咨诹善道,察纳雅言,深追先帝遗诏。
臣不胜受恩感激。
今当远离,临表涕零,不知所言。