A算法
基于A算法的路径规划研究综述
11网络通信技术Network Communication Technology电子技术与软件工程Electronic Technology & Software EngineeringA*(A-Star )算法是一种静态路网中求解最短路径的直接搜索方法,因其灵活简便和对完整性及最优性的保证得以在机器人低维路径规划领域中广泛应用。
但同时也存在以下缺陷:一是在大规模环境中应用时,节点网络非常庞大,算法运行时间长;二是扩展节点时占用内存开销较大;三是计算复杂度依赖环境网格分辨率大小。
针对这些缺陷,已有很多学者提出了改进。
本文首先介绍A*算法原理并进行影响因素分析,然后从启发函数、搜索策略、数据存储与查找等方面介绍A*算法的改进方法及研究现状,进而展望了算法未来发展和面临的挑战。
1 A*算法原理A*算法是一种有序搜索算法,相比于Dijkstra 算法,加入了启发函数,使其朝着目标点有方向性的扩展节点,因此算法效率有了较大的提升。
A*算法的特点是,对于遍历的每一个节点,都采用一个评价函数f(n)来计算其通过该节点的代价,在每一次搜索时总是选择当前位置周围通行代价f(n)最小的点来扩展,如此从起始节点不断搜索直到找到目标节点,生成一条通行代价最小的路径。
关于评价函数的计算方式如下式:f(n)=g(n)+h(n) (1)其中,h(n)代表从当前点到目标点的估计代价,同时也是启发函数,g(n)计算方式为从起点到节点n 的实际行走距离。
2 算法分析由原理分析可知,影响A*算法搜索效率的主要因素是:2.1 启发函数的设置一般来说,从当前节点到目标点的启发函数一般小于实际路径代价,这样才可能得到最优解,但同时会增加扩展的节点数,增大算法时间开销。
理想情况是启发函数h(n)恰好等于实际路径代价,这样扩展节点最少,且刚好能找到最优路径。
2.2 访问open表寻找f(n)最小值的时间开销大传统的open 表可能采用Array 、List 、Queue 等结构来存储节点信息,随着搜索深度越深,要查找的节点就越多,每次扩展节点时都需要对open 表排序,查找f 最小值的节点,这会耗费部分时间,所以优化open 表的排序和查找是一个关键的改进方向。
人工智能a算法
人工智能a算法
人工智能中的A算法是一种启发式搜索算法,也被称为A算法。
它利用估
价函数f(n)=g(n)+h(n)对Open表中的节点进行排序,其中g(n)是从起始
节点到当前节点n的实际代价,h(n)是从当前节点n到目标节点的估计代价。
A算法在搜索过程中会优先选择估价值最小的节点进行扩展,这样可以更有效地逼近目标节点,提高搜索效率。
A算法可以根据搜索过程中选择扩展节点的范围,将其分为全局择优搜索算法和局部择优搜索算法。
全局择优搜索算法会从Open表的所有节点中选择一个估价值最小的节点进行扩展,而局部择优搜索算法仅从刚生成的子节点中选择一个估价值最小的节点进行扩展。
A算法的搜索过程可能包括以下步骤:
1. 把初始节点S0放入Open表中,计算其估价值f(S0)=g(S0)+h(S0)。
2. 如果Open表为空,则问题无解,算法失败退出。
3. 把Open表的第一个节点取出放入Closed表,并记该节点为n。
4. 考察节点n是否为目标节点。
若是,则找到了问题的解,算法成功退出。
5. 若节点n不可扩展,则转到第2步。
6. 扩展节点n,生成子节点ni(i=1,2,…… ),计算每一个子节点的估价值f(ni) (i=1,2,……)。
7. 把子节点放入Open表中,并根据估价值进行排序。
8. 重复步骤2-7,直到找到目标节点或Open表为空。
总之,人工智能中的A算法是一种有效的人工智能搜索策略,它可以用于解决许多不同的问题,例如路径规划、机器人控制、游戏AI等。
A算法ppt课件
f(S2)=d(S2)+W(S2)=2+2=4 从图1还可以看出,该问题的解为 S0 →S1 →S2 →S3 →Sg
5
图1 八数码难题的全局择优搜索树
6
7
2.局部择优搜索
对这一算法进一步分析也可以发现:如果取估 价函数f(n)=g(n),则它将退化为代价树的深度 优先搜索;如果取估价函数f(n)=d(n),则它将 退化为深度优先搜索。可见,深度优先搜索和 代价树的深度优先搜索是局部择优搜索的两个 特例。
9
A*算法
上一节讨论的启发式搜索算法,都没有 对估价函数f(n)做任何限制。实际上,估 价函数对搜索过程是十分重要的,如果 选择不当,则有可能找不到问题的解, 或者找到的不是问题的最优解。为此, 需要对估价函数进行某些限制。A*算法 就是对估价函数加上一些限制后得到的 一种启发式搜索算法。
退出; (5)若节点n不可扩展,则转到第(2)步; (6)扩展节点n,生成子节点ni(i=1,2,……),计算每一个子节点的
估价值f(ni) (i=1,2,……),并按估价值从小到大的顺序依次放入 Open表的首部,并为每一个子节点设置指向父节点的指针,然后 转第(2)步。
8
由于这一算法的第六步仅仅是把刚生成的子节 点按其估价函数值从小到大放入Open表中,这 样在算法第(3)步取出的节点仅是刚生成的子节 点中估价函数值最小的一个节点。因此,它是 一种局部择优的搜索方式。
2
1. 全局择优搜索
在全局择优搜索中,每当需要扩展节点时,总是从Open表的所有节点中 选择一个估价函数值最小的节点进行扩展。其搜索过程可能描述如下:
A算法在路径规划中的应用
A算法在路径规划中的应用路径规划是人工智能领域的一个核心问题,它在许多实际应用中发挥着重要的作用。
A算法(A* Algorithm)作为一种常用的搜索算法,被广泛用于路径规划中。
本文将探讨A算法在路径规划中的应用。
一、A算法简介A算法是一种启发式搜索算法,用于在图形结构的网络中寻找从起始节点到目标节点的最短路径。
与传统的搜索算法相比,A算法利用了启发式函数来评估每个节点的优先级,从而更加高效地搜索最优路径。
它结合了广度优先搜索和贪心算法的优点,能够在较短的时间内找到近似最优解。
二、A算法的工作原理A算法采用了一种启发式评估函数(Heuristic Evaluation Function),该函数用来估计从当前节点到目标节点的代价。
一般情况下,这个启发式评估函数采用欧几里得距离、曼哈顿距离等方式进行计算。
A算法根据节点的代价和启发式评估函数的值选择下一个最优的节点进行扩展,直到找到目标节点或者遍历完所有可能的节点。
三、A算法在路径规划中的应用案例A算法在路径规划中有着广泛的应用,下面以智能车辆路径规划为例进行说明。
智能车辆路径规划是一个典型的实时路径规划问题。
智能车辆需要通过传感器获取当前位置和周围环境信息,并根据这些信息选择最优的路径到达目的地。
A算法能够快速找到最短路径,适用于智能车辆路径规划。
智能车辆路径规划中,A算法的步骤如下:1. 初始化启发式评估函数和起始节点,将起始节点加入open列表。
2. 通过启发式评估函数计算起始节点到目标节点的代价,并更新起始节点的优先级。
3. 从open列表中选择优先级最高的节点,将其加入close列表。
4. 如果选择的节点是目标节点,则路径规划结束;否则,继续扩展该节点的相邻节点。
5. 对每个相邻节点计算代价和优先级,并更新open列表。
6. 重复步骤3至5,直到找到目标节点或者open列表为空。
通过以上步骤,A算法可以寻找到智能车辆从起始点到目标点的最短路径,并且具备实时性和高效性。
基于a星算法航迹规划流程

基于a星算法航迹规划流程英文回答:A algorithm, also known as A-star algorithm, is a popular pathfinding algorithm used in computer science and robotics. It is widely used in various applications, including navigation systems, video games, and autonomous vehicles.The basic idea behind the A algorithm is to find the shortest path between two points on a graph. It combines the advantages of both Dijkstra's algorithm and the Greedy Best-First Search algorithm. The A algorithm evaluates nodes based on two factors: the cost of reaching a node from the start node, known as the "g-score", and the estimated cost of reaching the goal node from the current node, known as the "h-score". The sum of these two scores is used to determine the priority of exploring a node.The A algorithm uses a priority queue to keep track ofthe nodes to be explored. It starts by adding the startnode to the priority queue with a priority of 0. Then, it repeatedly selects the node with the highest priority from the queue and explores its neighbors. For each neighbor,the algorithm calculates the g-score and h-score, and updates the priority queue accordingly. The algorithm continues until it reaches the goal node or the priority queue becomes empty.One of the key features of the A algorithm is itsability to make use of heuristics to guide the search. Theh-score, also known as the heuristic function, provides an estimate of the cost from the current node to the goal node. This heuristic function can be admissible, meaning it never overestimates the actual cost, or it can be consistent, meaning it satisfies the triangle inequality. The choice of heuristic function can greatly influence the performance of the algorithm.Let me illustrate the A algorithm with an example. Suppose we have a grid representing a map, where each cell can be either empty or blocked. We want to find theshortest path from the start cell to the goal cell. We can assign a cost of 1 to each movement from one cell to an adjacent cell. Additionally, we can use the Euclidean distance as the heuristic function.Here's how the A algorithm works in this example:1. Initialize the start cell with a g-score of 0 and calculate the h-score for the start cell.2. Add the start cell to the priority queue with a priority of 0.3. While the priority queue is not empty:Select the cell with the highest priority from the queue.If the selected cell is the goal cell, the algorithm terminates.Otherwise, explore the neighbors of the selectedcell:Calculate the g-score for each neighbor by adding the cost of moving from the selected cell to the neighbor.Calculate the h-score for each neighbor using the Euclidean distance.Update the priority queue with the new g-score and h-score for each neighbor.4. If the priority queue becomes empty before reaching the goal cell, there is no path from the start cell to the goal cell.The A algorithm guarantees to find the shortest path if the heuristic function is admissible. It is efficient and widely used in practice due to its ability to guide the search based on both the cost and the estimated cost to reach the goal. It is a powerful tool for pathfinding and navigation problems.中文回答:A算法,也被称为A星算法,是一种在计算机科学和机器人学中广泛应用的路径规划算法。
a算法 原理
a算法原理
a算法,又称为“A星算法”(A* algorithm),是一种常用于路径规划的搜索算法。
它在图形数据结构中使用启发式函数来评估每个节点的优先级,以确定最短路径。
a算法的原理基于Dijkstra算法,但引入了启发式函数,以提高搜索效率。
启发式函数可以用来估计从当前节点到目标节点的最短距离,从而在搜索过程中优先考虑朝着目标节点前进的路径。
具体实现时,a算法维护一个优先队列,每次从队列中选择优先级最高的节点进行扩展。
对于每个被扩展的节点,计算其启发式函数值,并将该节点的邻居节点添加到队列中。
通过不断地扩展节点并更新最短路径,直到找到目标节点或队列为空,即可得到最短路径。
启发式函数的设计是a算法的关键。
通常使用估算的直线距离(如欧几里得距离)作为启发式函数值,但也可以根据具体问题进行相应的调整和优化。
总之,a算法是一种基于启发式函数的搜索算法,它通过评估节点的优先级来寻找最短路径。
这一算法在解决路径规划等问题上具有较高的效率和精确性。
a算法求解八数码问题 实验报告
题目: a算法求解八数码问题实验报告目录1. 实验目的2. 实验设计3. 实验过程4. 实验结果5. 实验分析6. 实验总结1. 实验目的本实验旨在通过实验验证a算法在求解八数码问题时的效果,并对其进行分析和总结。
2. 实验设计a算法是一种启发式搜索算法,主要用于在图形搜索和有向图中找到最短路径。
在本实验中,我们将使用a算法来解决八数码问题,即在3x3的九宫格中,给定一个初始状态和一个目标状态,通过移动数字的方式将初始状态转变为目标状态。
具体的实验设计如下:1) 实验工具:我们将使用编程语言来实现a算法,并结合九宫格的数据结构来解决八数码问题。
2) 实验流程:我们将设计一个初始状态和一个目标状态,然后通过a 算法来求解初始状态到目标状态的最短路径。
在求解的过程中,我们将记录下每一步的状态变化和移动路径。
3. 实验过程我们在编程语言中实现了a算法,并用于求解八数码问题。
具体的实验过程如下:1) 初始状态和目标状态的设计:我们设计了一个初始状态和一个目标状态,分别为:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 42) a算法求解:我们通过a算法来求解初始状态到目标状态的最短路径,并记录下每一步的状态变化和移动路径。
3) 实验结果在实验中,我们成功求解出了初始状态到目标状态的最短路径,并记录下了每一步的状态变化和移动路径。
具体的实验结果如下:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 47 6 5求解路径:1. 上移1 2 37 8 62. 左移1 2 3 4 0 5 7 8 63. 下移1 2 3 4 8 5 7 0 64. 右移1 2 3 4 8 5 0 7 65. 上移1 2 3 0 8 5 4 7 61 2 38 0 54 7 67. 下移1 2 38 7 54 0 68. 右移1 2 38 7 54 6 0共计8步,成功从初始状态到目标状态的最短路径。
a算法实验报告

a算法实验报告算法实验报告引言算法是计算机科学中的重要概念,它是解决问题的一种方法或步骤。
在本次实验中,我们将研究和分析一种名为a算法的搜索算法。
a算法是一种启发式搜索算法,用于在图形或网络中找到最短路径。
本文将介绍a算法的原理、实验设计和结果分析。
1. a算法原理a算法是一种基于贪心策略的搜索算法,它通过估计从起点到目标节点的距离来选择下一个要扩展的节点。
它使用两个函数来评估节点的优先级:g(n)表示从起点到节点n的实际代价,h(n)表示从节点n到目标节点的估计代价。
a算法通过计算f(n) = g(n) + h(n)来确定节点的优先级,选择f(n)值最小的节点进行扩展。
2. 实验设计为了验证a算法的性能和效果,我们设计了一个实验场景:在一个迷宫中,从起点到目标节点的最短路径。
我们使用Python编程语言实现了a算法,并将其应用于迷宫问题。
迷宫由一个二维矩阵表示,其中1表示墙壁,0表示可通行的路径。
我们随机生成了多个迷宫,并记录了a算法在每个迷宫上的运行时间和找到的最短路径。
3. 实验结果分析通过对多个迷宫进行测试,我们得到了以下实验结果。
首先,我们观察到a算法在大多数情况下能够找到最短路径。
然而,在某些特殊情况下,由于启发式函数的估计不准确,a算法可能无法找到最优解。
此外,我们还注意到a算法的运行时间与迷宫的规模和复杂度相关。
当迷宫较大或路径较长时,a算法的运行时间会显著增加。
4. 结论本次实验中,我们研究和分析了a算法的性能和效果。
通过实验结果分析,我们发现a算法在大多数情况下能够找到最短路径,但在某些特殊情况下可能无法找到最优解。
此外,a算法的运行时间与问题的规模和复杂度相关。
因此,在实际应用中,我们需要权衡算法的效果和运行时间,选择合适的搜索算法。
总结a算法是一种启发式搜索算法,用于在图形或网络中找到最短路径。
本次实验通过设计迷宫问题,验证了a算法的性能和效果。
通过实验结果分析,我们得出结论:a算法在大多数情况下能够找到最短路径,但在某些特殊情况下可能无法找到最优解。
A算法的实现原理及应用

A算法的实现原理及应用算法是计算机科学中重要的概念,其本质是一种数学思想,是一系列求解问题的方法和步骤。
A算法,也称为A*算法,是一种常见的寻路算法,被广泛应用于游戏开发、人工智能、机器人控制等领域。
本文将介绍A算法的实现原理及其应用。
一、A算法的实现原理A算法是一种搜索算法,其目标是在搜索图中找到从起点到终点的最短路径。
A算法基于一种启发式搜索策略,即优先考虑最有可能通向终点的节点。
下面是A算法的基本实现步骤:1. 初始化开始节点和结束节点,并把开始节点加入到开启列表中。
2. 从开启列表中选出具有最小f值(f值是节点的启发值和代价值之和)的节点作为当前节点。
3. 把当前节点从开启列表中删除,并将其加入到关闭列表中。
4. 遍历当前节点的相邻节点,如果相邻节点不可通过或者已经在关闭列表中,就忽略。
5. 对于未被遍历过的相邻节点,计算它的f值、g值和h值。
其中,g值表示从起点到该节点的代价,h值表示该节点到终点的启发值,即估算到终点的实际代价。
6. 如果相邻节点已经在开启列表中,比较新的g值和原先的g值,如果新的g值更小,就更新g值和f值。
如果相邻节点不在开启列表中,将其加入到开启列表中,并计算其f、g、h值。
7. 重复步骤2到步骤6,直到找到终点或者开启列表为空。
二、A算法的应用A算法是一种高效的寻路算法,其应用非常广泛。
下面列举几个例子:1. 游戏开发在游戏开发中,A算法被广泛用于计算游戏场景中的敌人或角色行走的最佳路径。
游戏场景通常被表示为一个二维数组,A算法可以根据玩家角色的位置和目标位置,在场景图中寻找最短路径,并输出路径。
2. 人工智能A算法是人工智能领域中常用的算法之一,可以被用于求解最优路径问题。
例如,在机器人路径规划中,A算法可以根据机器人的当前位置和目标位置,搜索机器人的最短路径,并输出路径。
3. 网络路由A算法也被广泛应用于网络路由领域。
当网络中出现路由选择问题时,A算法可以根据网络拓扑结构和路由代价,寻找到源节点到目标节点的最短路径。
人工智能a算法

1.启发式搜索算法A启发式搜索算法A,一般简称为A算法,是一种典型的启发式搜索算法。
其基本思想是:定义一个评价函数f,对当前的搜索状态进行评估,找出一个最有希望的节点来扩展。
评价函数的形式如下:f(n)=g(n)+h(n)其中n是被评价的节点。
f(n)、g(n)和h(n)各自表述什么含义呢?我们先来定义下面几个函数的含义,它们与f(n)、g(n)和h(n)的差别是都带有一个"*"号。
g*(n):表示从初始节点s到节点n的最短路径的耗散值;h*(n):表示从节点n到目标节点g的最短路径的耗散值;f*(n)=g*(n)+h*(n):表示从初始节点s经过节点n到目标节点g的最短路径的耗散值。
而f(n)、g(n)和h(n)则分别表示是对f*(n)、g*(n)和h*(n)三个函数值的的估计值。
是一种预测。
A算法就是利用这种预测,来达到有效搜索的目的的。
它每次按照f(n)值的大小对OPEN表中的元素进行排序,f值小的节点放在前面,而f值大的节点则被放在OPEN表的后面,这样每次扩展节点时,都是选择当前f值最小的节点来优先扩展。
利用评价函数f(n)=g(n)+h(n)来排列OPEN表节点顺序的图搜索算法称为算法A。
过程A①OPEN:=(s),f(s):=g(s)+h(s);②LOOP:IF OPEN=()THEN EXIT(FAIL);③n:=FIRST(OPEN);④IF GOAL(n)THEN EXIT(SUCCESS);⑤REMOVE(n,OPEN),ADD(n,CLOSED);⑥EXPAND(n)→{mi},计算f(n,mi)=g(n,mi)+h(mi);g(n,mi)是从s通过n到mi的耗散值,f(n,mi)是从s通过n、mi到目标节点耗散值的估计。
·ADD(mj,OPEN),标记mi到n的指针。
·IF f(n,mk)<f(mk)THEN f(mk):=f(n,mk),标记mk到n的指针;比较f(n,mk)和f(mk),f(mk)是扩展n 之前计算的耗散值。
八数码C语言A算法详细代码
八数码C语言A算法详细代码以下是八数码问题的C语言A*算法的详细代码:```c#include <stdio.h>#include <stdlib.h>#define N 3typedef struct Nodeint board[N][N]; // 八数码局面struct Node *parent; // 父节点指针int f; // f(n) = g(n) + h(n),g(n)表示起始节点到当前节点的代价,h(n)表示当前节点到目标节点的估计代价int g; // g(n)int h; // h(n)} Node;//目标局面int target[N][N] = {{1, 2, 3}, {8, 0 ,4}, {7, 6, 5}};//计算当前节点到目标节点的曼哈顿距离int manhattanDistance(int board[N][N])int distance = 0;for (int i = 0; i < N; i++)for (int j = 0; j < N; j++)if (board[i][j] != 0)int value = board[i][j] - 1;int targetI = value / N;int targetJ = value % N;distance += abs(i - targetI) + abs(j - targetJ);}}}return distance;//创建一个新节点Node* createNode(int board[N][N], int g, Node* parent) Node* node = (Node*) malloc(sizeof(Node));for (int i = 0; i < N; i++)for (int j = 0; j < N; j++)node->board[i][j] = board[i][j];}}node->parent = parent;node->g = g;node->h = manhattanDistance(board);node->f = node->g + node->h;return node;//判断两个局面是否相等int isBoardEqual(int board1[N][N], int board2[N][N]) for (int i = 0; i < N; i++)for (int j = 0; j < N; j++)if (board1[i][j] != board2[i][j])return 0;}}}return 1;//判断节点是否在开放列表中int isInOpenList(Node *node, Node **openList, int openListSize)for (int i = 0; i < openListSize; i++)if (isBoardEqual(node->board, openList[i]->board))return 1;}}return 0;//判断节点是否在关闭列表中int isInClosedList(Node *node, Node **closedList, int closedListSize)for (int i = 0; i < closedListSize; i++)if (isBoardEqual(node->board, closedList[i]->board))return 1;}}return 0;//比较两个节点的f(n)值Node *a = *(Node **)node1;Node *b = *(Node **)node2;return a->f - b->f;//输出路径void printPath(Node *node)if (node != NULL)printPath(node->parent);printf("Step %d:\n", node->g);for (int i = 0; i < N; i++)printf("%d %d %d\n", node->board[i][0], node->board[i][1], node->board[i][2]);}printf("\n");}//A*算法求解八数码问题void solvePuzzle(int initial[N][N])//创建初始节点Node* initialNode = createNode(initial, 0, NULL);//开放列表和关闭列表Node* openList[N*N*N*N];int openListSize = 0;Node* closedList[N*N*N*N];int closedListSize = 0;//将初始节点放入开放列表openList[openListSize++] = initialNode;while (openListSize > 0)//从开放列表中选择f(n)最小的节点//取出开放列表中f(n)最小的节点作为当前节点Node* currentNode = openList[0];//将当前节点从开放列表中移除for (int i = 1; i < openListSize; i++) openList[i - 1] = openList[i];}openListSize--;//将当前节点放入关闭列表closedList[closedListSize++] = currentNode; //判断当前节点是否为目标节点if (isBoardEqual(currentNode->board, target)) printf("Solution found!\n");printPath(currentNode);return;}//生成当前节点的邻居节点int i = 0, j = 0;for (i = 0; i < N; i++)for (j = 0; j < N; j++)if (currentNode->board[i][j] == 0)break;}}if (j < N)break;}}if (i > 0)int newBoard[N][N];for (int k = 0; k < N; k++)for (int l = 0; l < N; l++)newBoard[k][l] = currentNode->board[k][l]; }}newBoard[i][j] = newBoard[i - 1][j];newBoard[i - 1][j] = 0;if (!isInOpenList(createNode(newBoard, currentNode->g + 1, currentNode), openList, openListSize) &&!isInClosedList(createNode(newBoard, currentNode->g + 1, currentNode), closedList, closedListSize))openList[openListSize++] = createNode(newBoard, currentNode->g + 1, currentNode);}}if (i < N - 1)int newBoard[N][N];for (int k = 0; k < N; k++)for (int l = 0; l < N; l++)newBoard[k][l] = currentNode->board[k][l];}}newBoard[i][j] = newBoard[i + 1][j];newBoard[i + 1][j] = 0;currentNode), openList, openListSize) &&!isInClosedList(createNode(newBoard, currentNode->g + 1, currentNode), closedList, closedListSize))openList[openListSize++] = createNode(newBoard, currentNode->g + 1, currentNode);}}if (j > 0)int newBoard[N][N];for (int k = 0; k < N; k++)for (int l = 0; l < N; l++)newBoard[k][l] = currentNode->board[k][l];}}newBoard[i][j] = newBoard[i][j - 1];newBoard[i][j - 1] = 0;if (!isInOpenList(createNode(newBoard, currentNode->g + 1, currentNode), openList, openListSize) &¤tNode), closedList, closedListSize))openList[openListSize++] = createNode(newBoard, currentNode->g + 1, currentNode);}}if (j < N - 1)int newBoard[N][N];for (int k = 0; k < N; k++)for (int l = 0; l < N; l++)newBoard[k][l] = currentNode->board[k][l];}}newBoard[i][j] = newBoard[i][j + 1];newBoard[i][j + 1] = 0;if (!isInOpenList(createNode(newBoard, currentNode->g + 1, currentNode), openList, openListSize) &&!isInClosedList(createNode(newBoard, currentNode->g + 1, currentNode), closedList, closedListSize))openList[openListSize++] = createNode(newBoard, currentNode->g + 1, currentNode);}}}printf("Solution not found!\n");int maiint initial[N][N] = {{2, 8, 3}, {1, 6, 4}, {7, 0, 5}};solvePuzzle(initial);return 0;```这个代码实现了八数码问题的A*算法。
实验四:A星算法求解迷宫问题实验
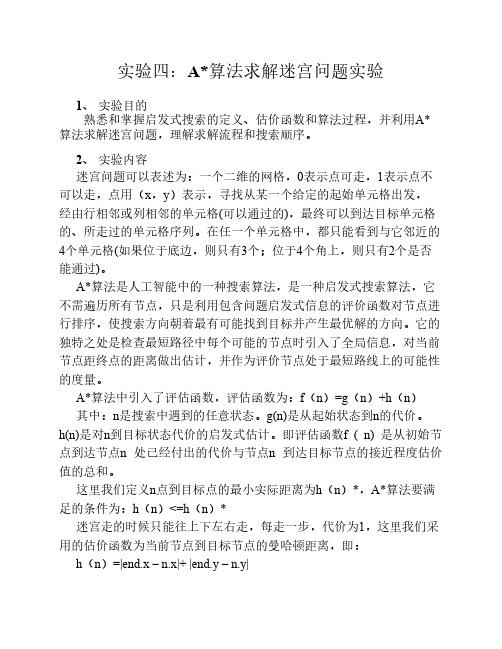
//打印路径 void print(Queue_Node *p) { if(p==NULL) { return; } print(p->pre); cout<<"("<<p->_x<<","&l;; } bool bound(int x,int y) { return (x<=_len)&&(x>=1)&&(y<=_wid)&&(y>=1); } int get_H(int x,int y) { return ab(x-_ex)+ab(y-_ey); } int ab(int i) { return i<0 ? -i:i; } private: struct cmp { bool operator()(Queue_Node *n1,Queue_Node *n2) { return n1->_F>n2->_F; } }; priority_queue<Queue_Node *,vector<Queue_Node *>,cmp> _open;//最 小堆(开放列表) int _len,_wid;//迷宫左边长,上边宽 int _sx,_sy,_ex,_ey; Seal **_seal;//动态开辟封闭列表 unsigned char **_maze;//迷宫地图
for(i=0;i<=_len;++i) { delete []_seal[i]; delete []_maze[i]; } delete []_seal; delete []_maze; } void input() { cout<<"输入: 迷宫左边长,上边宽! 例如:30 20"<<endl; cin>>_len>>_wid; _seal=new Seal*[_len+1]; _maze=new unsigned char*[_len+1]; for(int i=0;i<=_len;++i) { _seal[i]=new Seal[_wid+1]; _maze[i]=new unsigned char[_wid+1]; } cout<<"从下一行开始输入迷宫信息:"<<endl; for( i=1;i<=_len;++i) { for(int j=1;j<=_wid;++j) { cin>>_maze[i][j]; _seal[i][j].flag=UNVISITED; _seal[i][j].point=NULL; } } cout<<"输入起点坐标,目标点坐标,例如:1 1 30 20"<<endl; cin>>_sx>>_sy>>_ex>>_ey; if(_maze[_sx][_sy]=='1'||_maze[_ex] [_ey]=='1'||bound(_sx,_sy)==false||bound(_ex,_ey)==false) { cout<<"不可能存在这样的情况!"<<endl;
A算法(课堂PPT)
.
10
假设f*(n)为从初始节点S0出发,约束经过节点n到达 目标节点的最小代价值。估价函数f(n)则是f*(n)的估 计值。显然,f*(n)应由以下两部分所组成:一部分是 从初始节点S0到节点n的最小代价,记为g*(n);另一 部分是从节点n到目标节点的最小代价,记为h*(n), 当问题有多个目标节点时,应选取其中代价最小的一 个。因此有
.
2
1. 全局择优搜索
在全局择优搜索中,每当需要扩展节点时,总是从Open表的所有节点中 选择一个估价函数值最小的节点进行扩展。其搜索过程可能描述如下:
(1)把初始节点S0放入Open表中,f(S0)=g(S0)+h(S0); (2)如果Open表为空,则问题无解,失败退出; (3)把Open表的第一个节点取出放入Closed表,并记该节点为n; (4)考察节点n是否为目标节点。若是,则找到了问题的解,成功退出; (5)若节点n不可扩展,则转到第(2)步; (6)扩展节点n,生成子节点ni(i=1,2,……),计算每一个子节点的估价
.
11
有了g*(n) 和h*(n)的定义,如果我们 对A算法(全局择优的启发式搜索算法) 中的g(n)和h(n)分别提出如下限制:
g(n)是对g*(n)的估计,且g(n)>0;
h(n)是对h*(n)的下界,即对任意节点 n均有
则称得到的算法为A*算法。
h(n)h*(n)
.
12
1.A*算法的可纳性
解:这个问题的全局择优搜索树如图1所示。 在图1中,每个节点旁边的数字是该节点的估 价函数值。例如,对节点S2,其估价函数的计 算为
f(S2)=d(S2)+W(S2)=2+2=4 从图1还可以看出,该问题的解为 S0 →S1 →S2 →S3 →Sg
A 算法

好处
其实A算法也是一种最好优先的算法。
只不过要加上一些约束条件罢了。由于在一些问题求解时,我们希望能够求解出状态空间搜索的最短路径, 也就是用最快的方法求解问题,A就是干这种事情的!
我们先下个定义,如果一个估价函数可以找出最短的路径,我们称之为可采纳性。A算法是一个可采纳的最好 优先算法。A算法的估价函数可表示为:
f'(n) = g'(n) + h'(n)。
这里,f'(n)是估价函数,g'(n)是起点到节点n的最短路径值,h'(n)是n到目标的最短路经的启发值。由于 这个f'(n)其实是无法预先知道的,所以我们用前面的估价函数f(n)做近似。g(n)代替g'(n),但 g(n)>=g'(n) 才可(大多数情况下都是满足的,可以不用考虑),h(n)代替h'(n),但h(n)<=h'(n)才可(这一点特别的重 要)。可以证明应用这样的估价函数是可以找到最短路径的,也就是可采纳的。我们说应用这种估价函数的最好 优先算法就是A算法。
简单案例
参见参考资料中的“A算法入门” 。 另外,A同样可以用于其他搜索问题,只需要对应状态和状态的距离即可。
分类
该算法在最短路径搜索算法中分类为: 直接搜索算法:直接在实际地图上进行搜索,不经过任何预处理; 启发式算法:通过启发函数引导算法的搜索方向; 静态图搜索算法:被搜索的图的权值不随时间变化(后被证明同样可以适用于动态图的搜索 )。
实际运用
距离估计与实际值越接近,估价函数取得就越好。 例如对于几何路来说,可以取两节点间曼哈顿距离做为距离估计,即f=g(n) + (abs(dx - nx) + abs(dy - ny));这样估价函数f(n)在g(n)一定的情况下,会或多或少的受距离估计值h(n)的制约,节点距目标点近,h 值小,f值相对就小,能保证最短路的搜索向终点的方向进行。明显优于Dijkstra算法的毫无方向的向四周搜索。 算法实现(路径搜索) 创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点; 算起点的h(s); A算法将起点放入OPEN表。 保存路径,即从终点开始,每个节点沿着父节点移动直至起点,这就是算法的路径; 用C语言实现A最短路径搜索算法,作者 Tittup frog(跳跳蛙)。
A算法
假设A2*搜索树上有一个满足d(n)=k+1的节点 n, A2*扩展了该节点,但A1*没有扩展它。根 据第(2)条的假设,知道A1*扩展了节点n的父 节点。因此,n必定在A1*的Open表中。既然 节点n没有被A1*扩展,则有
f1(n)≥f*(S0)
即
g1(n)+h1(n) ≥f*(S0)
29
14
定理1证明:
首先证明算法必定会结束。由于搜索图为有限图,如
果算法能找到解,则会成功结束;如果算法找不到解, 则必然会由于Open表变空而结束。因此,A*算法必然 会结束。
然后证明算法一定会成功结束。由于至少存在一
条由初始节点到目标节点的路径,设此路径
S0= n0,n1 ,…,nk =Sg
f*(n)=g*(n) +h*(n)
把估价函数f(n)与 f*(n)相比,g(n)是对g*(n)的一
个估计,h(n)是对h*(n)的一个估计。在这两个估计中,
尽管g(n)的值容易计算,但它不一定就是从初始节点
S0到节点n的真正最小代价,很有可能从初始节点S0到
节点n的真正最小代价还没有找到,故有
解:这个问题的全局择优搜索树如图1所示。 在图1中,每个节点旁边的数字是该节点的估 价函数值。例如,对节点S2,其估价函数的计 算为
f(S2)=d(S2)+W(S2)=2+2=4 从图1还可以看出,该问题的解为 S0 →S1 →S2 →S3 →Sg
5
图1 八数码难题的全局择优搜索树
退出; (5)若节点n不可扩展,则转到第(2)步; (6)扩展节点n,生成子节点ni(i=1,2,……),计算每一个子节点的
a计权算法c语言
a计权算法c语言在计算机科学领域中,算法是解决问题的一种方法或步骤。
而在信息检索领域,a计权算法是一种常用的算法,用于对文本进行权重计算和排序。
本文将介绍a计权算法的原理和实现,以及如何在C 语言中使用。
让我们来了解a计权算法的原理。
a计权算法是一种基于词频和文档频率的算法,用于衡量一个词语在文本中的重要性。
它的核心思想是,一个词语在文本中的出现频率越高,并且在其他文本中出现的频率越低,那么它的重要性就越高。
在a计权算法中,首先需要计算词频。
词频是指一个词语在文本中出现的次数。
我们可以通过遍历文本,将每个词语的出现次数进行统计,得到一个词频表。
接下来,需要计算文档频率。
文档频率是指一个词语在整个文本集合中出现的文档数。
我们可以通过遍历整个文本集合,对每个词语进行统计,得到一个文档频率表。
有了词频表和文档频率表,就可以计算每个词语的a值。
a值可以通过以下公式计算:a = (1 + log(词频)) * log(文档总数 / (1 + 文档频率))其中,log表示自然对数。
通过这个公式,可以将词语的出现频率和文档频率进行综合考量,得到每个词语的a值。
需要对文本进行排序。
根据a值,可以对文本中的词语进行排序,将重要性较高的词语排在前面。
接下来,让我们来看看如何在C语言中实现a计权算法。
需要定义一个结构体来表示词语及其对应的a值。
可以使用C语言的结构体来实现:```ctypedef struct {char word[100];double a;} Word;```然后,需要实现计算词频和文档频率的函数。
可以使用C语言的哈希表来实现,将词语作为键,词频和文档频率作为值进行存储。
接下来,可以实现计算a值的函数。
根据公式,可以遍历词频表和文档频率表,计算每个词语的a值,并存储到对应的结构体中。
可以实现对文本进行排序的函数。
可以使用C语言的排序算法,根据词语的a值进行排序,将重要性较高的词语排在前面。
通过以上步骤,就可以在C语言中实现a计权算法。
A算法
void AstarPathfinder::GenerateSucc(NODE *BestNode,int x, int y, int dx, int dy) { int g, TileNumS, c = 0; NODE *Old, *Successor; //计算子节点的 g 值 //计算子节点的 g = BestNode->g+1; BestNodeTileNumS = TileNum(x,y); //子节点再Open表中吗? //子节点再Open表中吗? if ( (Old=CheckOPEN(TileNumS)) != NULL ) { //若在 //若在 for( c = 0; c <8; c++) if( BestNode->Child[c] == NULL ) BestNodebreak; BestNodeBestNode->Child[c] = Old;
//比较Open表中的估价值和当前的估价值(只要比较g值就可以了) //比较Open表中的估价值和当前的估价值(只要比较g if ( g g ) // if our new g value is Parent = BestNode; OldOld->g = g; OldOld->f = g + Old->h; Old} } else //在Closed表中吗? //在Closed表中吗? if ( (Old=CheckCLOSED(TileNumS)) != NULL ) { //若在 //若在 for( c = 0; c<8; c++) if ( BestNode->Child[c] == NULL ) BestNodebreak; BestNodeBestNode->Child[c] = Old; //比较Closed表中的估价值和当前的估价值(只要比 //比较Closed表中的估价值和当前的估价值(只要比 较g值就可以了) if ( g g ) // if our new g value is Parent = BestNode; OldOld->g = g; OldOld->f = g + Old->h; //再依次更新Old的所有子节 Old//再依次更新Old的所有子节 点的估价值 PropagateDown(Old);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 全局择优搜索
在全局择优搜索中,每当需要扩展节点时,总是从Open表的所有节点中 选择一个估价函数值最小的节点进行扩展。其搜索过程可能描述如下: (1)把初始节点S0放入Open表中,f(S0)=g(S0)+h(S0); (2)如果Open表为空,则问题无解,失败退出; (3)把Open表的第一个节点取出放入Closed表,并记该节点为n; (4)考察节点n是否为目标节点。若是,则找到了问题的解,成功退出; (5)若节点n不可扩展,则转到第(2)步; (6)扩展节点n,生成子节点ni(i=1,2,……),计算每一个子节点的估价 值f(ni) (i=1,2,……),并为每一个子节点设置指向父节点的指针,然后将 这些子节点放入Open表中; (7)根据各节点的估价函数值,对Open表中的全部节点按从小到大的 顺序重新进行排序; (8)转第(2)步。
假设f*(n)为从初始节点S0出发,约束经过节点n到达 目标节点的最小代价值。估价函数f(n)则是f*(n)的估 计值。显然,f*(n)应由以下两部分所组成:一部分是 从初始节点S0到节点n的最小代价,记为g*(n);另一 部分是从节点n到目标节点的最小代价,记为h*(n), 当问题有多个目标节点时,应选取其中代价最小的一 个。因此有 f*(n)=g*(n) +h*(n) 把估价函数f(n)与 f*(n)相比,g(n)是对g*(n)的一 个估计,h(n)是对h*(n)的一个估计。在这两个估计中, 尽管g(n)的值容易计算,但它不一定就是从初始节点 S0到节点n的真正最小代价,很有可能从初始节点S0到 节点n的真正最小代价还没有找到,故有
再证明A*算法只能终止在最佳路径上(反证 法)。 假设A*算法未能终止在最佳路径上,而是终 止在某个目标节点t处,则有 f (t ) g (t ) f * (S0 ) 但由引理5.2可知,在A*算法结束前,必有最 佳路径上的一个节点n’在Open表中,且有 f (n) f * (S0 ) f (t ) 这时,A*算法一定会选择n’ 来扩展,而不可能选择t,从而也不会去测试 目标节点t,这就与假设A*算法终止在目标节 点t相矛盾。因此,A*算法只能终止在最佳路 径上。
由于这一算法的第六步仅仅是把刚生成的子节 点按其估价函数值从小到大放入Open表中,这 样在算法第(3)步取出的节点仅是刚生成的子节 点中估价函数值最小的一个节点。因此,它是 一种局部择优的搜索方式。 对这一算法进一步分析也可以发现:如果取估 价函数f(n)=g(n),则它将退化为代价树的深度 优先搜索;如果取估价函数f(n)=d(n),则它将 退化为深度优先搜索。可见,深度优先搜索和 代价树的深度优先搜索是局部择优搜索的两个 特例。
引理2
在A*算法终止前的任何时刻,Open表中 总存在节点n’,它是从初始节点S0到目 标节点的最佳路径上的一个节点,且满 足。
f (n) f (S 0 )
*
引理2证明:
设从初始节点S0到目标节点t的最佳路径 序列为 S0= n0,n1 ,…,nk =Sg 算法开始时,节点S0在Open表中,当节 点S0离开Open进入Closed表时,节点n1 进入Open表。因此,A*没有结束以前, 在Open表中必存在最佳路径上的节点。 设这些节点排在最前面的节点为n’,则有
f (n) f * (S0 )
2.A*算法的最优性
A*算法的搜索效率很大程度上取决于估 价函数h(n)。一般说来,在满足 h(n)≤h*(n)的前提下,h(n)的值越大越 好。h(n)的值越大,说明它携带的启发 性信息越多,A*算法搜索时扩展的节点 就越少,搜索的效率就越高。A*算法的 这一特性也称为信息性。下面通过一个 定理来描述这一特性。
定理4
设有两个A*算法A1*和A2*,它们有 A1*:f1(n)=g1(n)+h1(n) A2*:f2(n)=g2(n)+h2(n) 如果A2*比A1*有更多的启发性信息,即对所有 非目标节点均有 h2(n)> h1(n) 则在搜索过程中,被A2*扩展的节点也必然被 A1*扩展,即A1*扩展的节点不会比A2*扩展的 节点少,亦即A2*扩展的节点集是A1*扩展的节 点集的子集。
A*算法
尚福华
A算法
在图搜索算法中,如果能在搜索的每一步都利 用估价函数f(n)=g(n)+h(n)对Open表中的节点 进行排序,则该搜索算法为A算法。由于估价 函数中带有问题自身的启发性信息,因此,A 算法又称为启发式搜索算法。 对启发式搜索算法,又可根据搜索过程中选择 扩展节点的范围,将其分为全局择优搜索算法 和局部择优搜索算法。
g (n) g * (n)
f (n) f (S 0 )
*
定理2 对无限图,若从初始节点S0到目 标节点t有路径存在,则A*算法必然会结 束。 证明:(反证法)假设A*算法不结束, 又引理5.1知Open表中的节点有任意大的 f值,这与引理5.2的结论相矛盾,因此, A*算法只能成功结束。
定理1证明:
首先证明算法必定会结束。由于搜索图为有限图,如 果算法能找到解,则会成功结束;如果算法找不到解, 则必然会由于Open表变空而结束。因此,A*算法必然 会结束。 然后证明算法一定会成功结束。由于至少存在一 条由初始节点到目标节点的路径,设此路径 S0= n0,n1 ,…,nk =Sg 算法开始时,节点n0在Open表中,而且路径中任一节 点ni离开Open表后,其后继节点ni+1必然进入Open表, 这样,在Open表变为空之前,目标节点必然出现在 Open表中。因此,算法必定会成功结束。
A*算法
上一节讨论的启发式搜索算法,都没有 对估价函数f(n)做任何限制。实际上,估 价函数对搜索过程是十分重要的,如果 选择不当,则有可能找不到问题的解, 或者找到的不是问题的最优解。为此, 需要对估价函数进行某些限制。A*算法 就是对估价函数加上一些限制后得到的 一种启发式搜索算法。
引理1
对无限图,如果从初始节点S0到目标节 点Sg有路径存在,且A*算法不终止的话, 则从Open表中选出的节点必将具有任意 大的f值。
引理1证明:
设d*(n)是A*生成的从初始节点S0到节点n的最 短路径长度,由于搜索图中每条边的代价都是 一个正数,令这些正数中最小的一个数是e,则 有 g * (n) d * (n) e 因为是最佳路径的代价,故有 g(n) g * (n) d * (n) e 又因为 h(n) 0 ,故有 f (n) g (n) h(n) g (n) d * (n) e 如果A*算法不终止的话,从Open表中选出的 节点必将具有任意大的d*(n)值,因此,也将 具有任意大的f值。
g(n) g (n)
*
有了g*(n) 和h*(n)的定义,如果我们 对A算法(全局择优的启发式搜索算法) 中的g(n)和h(n)分别提出如下限制: g(n)是对g*(n)的估计,且g(n)>0; h(n)是对h*(n)的下界,即对任意节点 n均有 则称得到的算法为A*算法。
h(n) h (n)
*
1.A*算法的可纳性
一般来说,对任意一个状态空间图,当 从初始节点到目标节点有路径存在时, 如果搜索算法能在有限步内找到一条从 初始节点到目标节点的最佳路径,并在 此路径上结束,则称该搜索算法是可纳 的。A*算法是可采纳的。下面我们分三 步来证明这一结论。
定理1
对有限图,如果从初始节点S0到目标节 点Sg有路径存在,则算法A*一定成功结 束。
但由于d=k时,A2*扩展的节点A1*也一定扩展,故有 g1(n)≤g2(n) 因此有 h1(n)≥f*(S0)-g2(n) 另一方面,由于A2*扩展了n,因此有 f2(n) ≤f*(S0) 即 g2(n)+h2(n) ≤f*(S0) 亦即 h2(n) ≤f*(S0)- g2(n) 所以有 h1(n) ≥ h2(n) 这与我们最初假设的h1(n) < h2(n)矛盾,因此反证法 的假设不成立。
证明:(用数学归纳法) (1)对深度d(n)=0的节点,即n为初始节 点S0,如果n为目标节点,则A1*和A2* 都不扩展n;如果n不是目标节点,则A1* 和A2*都要扩展n。 (2)假设对A2*搜索树中d(n)=k的任意节 点n,结论成立,即A1*也扩展了这些节 点。
(3)证明A2*搜索树中d(n)=k+1的任意节点n, 也要由A1*扩展(用反证法)。 假设A2*搜索树上有一个满足d(n)=k+1的节点 n, A2*扩展了该节点,但A1*没有扩展它。根 据第(2)条的假设,知道A1*扩展了节点n的父 节点。因此,n必定在A1*的Open表中。既然 节点n没有被A1*扩展,则有 f1(n)≥f*(S0) 即 g1(n)+h1(n) ≥f*(S0)
例 1: 八数码难题。
设问题的初始状态S0和目标状态Sg如图5-12所 示,估价函数与请用全局择优搜索解决该题。 解:这个问题的全局择优搜索树如图1所示。 在图1中,每个节点旁边的数字是该节点的估 价函数值。例如,对节点S2,其估价函数的计 算为 f(S2)=d(S2)+W(S2)=2+2=4 从图1还可以看出,该问题的解为 S0 →S1 →S2 →S3 →Sg Nhomakorabea
由于上述算法的第(7)步要对Open表中的全部 节点按其估价函数值从小到大重新进行排序, 这样在算法第(3)步取出的节点就一定是Open 表的所有节点中估价函数值最小的一个节点。 因此,它是一种全局择优的搜索方式。 对上述算法进一步分析还可以发现:如果取估 价函数f(n)=g(n),则它将退化为代价树的广度 优先搜索;如果取估价函数f(n)=d(n),则它将 退化为广度优先搜索。可见,广度优先搜索和 代价树的广度优先搜索是全局择优搜索的两个 特例。