模拟PI调节器的离散化实现
第三节调节器的调节规律及其实现方法
e0 te 0ut01e δ第三节 调节器的调节规律及其实现方法自动控制系统的调节质量取决于它的动态特性,即取决于组成控制系统的控制对象和调节设备的动态特性。
控制对象的动态特性一般是难以人为改变的。
所以,对于对象结构一定的控制系统,调节过程质量的好坏主要取决于控制系统的结构形式和调节器的动态特性。
调节器的动态特性也称为调节器的动作规律,是调节器的输入信号(一般为被调量的偏差信号)与输出信号(一般代表了执行机构的位置)之间的动态关系。
为了得到一个满意的调节过程,必须根据控制对象的动态特性确定控制系统的结构形式,选择调节器的动作规律,使自动控制系统有一个较好的动态特性。
一、调节器的调节规律1、比例调节规律(P )所谓比例调节规律,是指调节器输出的控制作用u (t )与其偏差输入信号e (t )之间成比例关系,即)()(t e K t u p =(1-11)式中 K p ——比例增益。
比例调节器的传递函数:p p K s E s U s G ==)()()( (1-12)工程中,常用比例带δ来描述其控制作用的强弱,即:pK 1=δ (1-13)其物理意义是在调节机构的位移改变100%时,被调量应有的改变量,如δ=20%时,则表明调节器输出变化100%时,需要其输入信号变化20%。
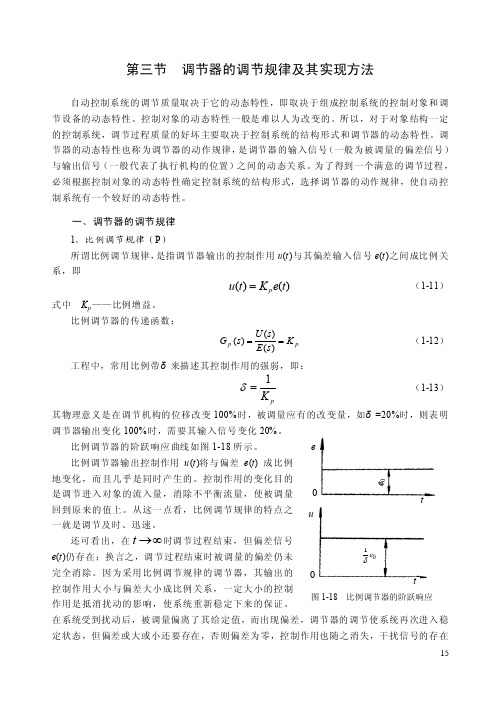
比例调节器的阶跃响应曲线如图1-18所示。
比例调节器输出控制作用u (t )将与偏差e (t ) 成比例地变化,而且几乎是同时产生的。
控制作用的变化目的是调节进入对象的流入量,消除不平衡流量,使被调量回到原来的值上。
从这一点看,比例调节规律的特点之一就是调节及时、迅速。
还可看出,在∞→t时调节过程结束,但偏差信号e (t )仍存在;换言之,调节过程结束时被调量的偏差仍未完全消除。
因为采用比例调节规律的调节器,其输出的控制作用大小与偏差大小成比例关系,一定大小的控制作用是抵消扰动的影响,使系统重新稳定下来的保证。
在系统受到扰动后,被调量偏离了其给定值,而出现偏差,调节器的调节使系统再次进入稳定状态,但偏差或大或小还要存在,否则偏差为零,控制作用也随之消失,干扰信号的存在eue 0tt图1-19 积分调节器的阶跃响应曲线就不可能使系统稳定下来。
PID控制实验报告

实验二数字pid控制计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量。
因此连续pid控制算法不能直接使用,需要采用离散化方法。
在计算机pid控制中,使用的是数字pid控制器。
一、位置式pid控制算法按模拟pid控制算法,以一系列的采样时刻点kt代表连续时间t,以矩形法数值积分近似代替积分,以一阶后向差分近似代替微分,可得离散pid位置式表达式:?tu(k)?kp?e(k)??ti?k?e(j)?j?0k?td(e(k)?e(k?1))??t?e(k)?e(k?1) t ?kpe(k)?ki?e(j)t?kdj?0式中,ki?kpti,u为控制,kd?kptd,e为误差信号(即pid控制器的输入)信号(即控制器的输出)。
在仿真过程中,可根据实际情况,对控制器的输出进行限幅。
二、连续系统的数字pid控制仿真连续系统的数字pid控制可实现d/a及a/d的功能,符合数字实时控制的真实情况,计算机及dsp的实时pid控制都属于这种情况。
1.ex3 设被控对象为一个电机模型传递函数g(s)?1,式中2js?bs j=0.0067,b=0.1。
输入信号为0.5sin(2?t),采用pd控制,其中kp?20,kd?0.5。
采用ode45方法求解连续被控对象方程。
d2ydyy(s)1?,则?u,另y1?y,y2?y?2因为g(s)?,所以j2?bdtu(s)js?bsdt??yy??12,因此连续对象微分方程函数ex3f.m如下 ?y?2??(b/j)y?(1/j)*u?2? function dy = ex3f(t,y,flag,para) u=para; j=0.0067;b=0.1;dy=zeros(2,1);dy(1) = y(2);dy(2) = -(b/j)*y(2) + (1/j)*u;控制主程序ex3.mclear all;close all;ts=0.001; %采样周期xk=zeros(2,1);%被控对象经a/d转换器的输出信号y的初值e_1=0;%误差e(k-1)初值u_1=0;%控制信号u(k-1)初值for k=1:1:2000 %k为采样步数time(k) = k*ts; %time中存放着各采样时刻rin(k)=0.50*sin(1*2*pi*k*ts); %计算输入信号的采样值para=u_1; % d/a tspan=[0 ts];[tt,xx]=ode45(ex3f,tspan,xk,[],para); %ode45解系统微分方程%xx有两列,第一列为tt时刻对应的y,第二列为tt时刻对应的y导数xk = xx(end,:); % a/d,提取xx中最后一行的值,即当前y和y导数yout(k)=xk(1); %xk(1)即为当前系统输出采样值y(k) e(k)=rin(k)-yout(k);%计算当前误差de(k)=(e(k)-e_1)/ts; %计算u(k)中微分项输出u(k)=20.0*e(k)+0.50*de(k);%计算当前u(k)的输出%控制信号限幅if u(k)>10.0u(k)=10.0;endif u(k)<-10.0u(k)=-10.0;end %更新u(k-1)和e(k-1)u_1=u(k);e_1=e(k);endfigure(1);plot(time,rin,r,time,yout,b);%输入输出信号图xlabel(time(s)),ylabel(rin,yout); figure(2);plot(time,rin-yout,r);xlabel(time(s)),ylabel(error);%误差图程序运行结果显示表1所示。
控制系统各种传递函数离散化后的递推公式推导及结果

于个人学习
4、 3 的选择
A、 根据c 选择: B、 根据如下关系式:
3c 。这种选择能保证 (c ) 至少为 45°。
18 / 25
*************************************************************************************文档收集自网络,仅
用于个人学习
十、前馈校正 (一) II 型系统前馈校正
20 / 25
Kq •S
G3 (S )
R(S)
E(S) K p 1S 1 +
-
S
G1(S)
1.前馈环节 的表达式推导 系统闭环传递函数为:
Kn
C(S)
S T1 S 1
G2 (S)
系统误差传递函数为:
假设:
由于二型系统对单位阶跃信号和等速信号的稳态误差为零,故这里仅讨论 输入信号为等加速信号时的情况。等加速信号即:文档收集自网络,仅用于个人学习
用于个人学习
九、正割函数校正
正割函数校正用于单脉冲雷达跟踪下的方位伺服系统(俯仰机构叠加
于方位机构式的天线座)。跟踪目标时的几何关系如下图:文档收集自网络,仅用于个
人学习
y
目标 B
C
o x ε β
zA
Dx
ε 由上图看出,在存在俯仰角 时,目标由 B 点移动到 C 点,雷达天线
轴线从 AB 线转动到 AC 线。这时,ABC 平面转过的角度为 。要使天线转
文档收集自网络,仅用于 文档收集自网络,仅用于个人学习
迭代公式:
;
第五章 预备知识 模拟控制器的离散化方法
2 aT tg T 2 k= a
D(z) =
1 + z −1 1 + ctg aT aT −1 + (1 − ctg )z 2 2
预畸变双线性变换的特点: (1)将S平面左半面映射到Z平面单位圆内。 (2)稳定的D(s)变换成稳定的D(z)。 (3)没有混叠现象。 (4)D(z)不能保持D(s)的脉冲响应和频率响应。 (5)所得的离散频率响应不产生畸变。
模拟化设计方法的一般步骤如下: 1.根据性能指标要求和给定对象的G0(s),用连续控制理 论的设计方法,设计D(s)。 2.确定离散系统的采样周期。 3.在设计好的连续系统中加入零阶保持器。检查由于零 阶保持器的滞后作用,对原设计好的连续系统性能是否 有影响,以决定是否修改D(s)。 为了简便起见,零阶保持器的传递函数可近似为:
当T
2
T1 2 = 2
时,阻尼系数ξ=0.707,其性能最好,则得
W (s) = 1 1 2 2 T1 s + T1 s + 1 2
其开环传递函数为
Gk ( s) = D( s)G0 ( s) =
1 T1 T1 s ( s + 1) 2
因此,二阶工程设计法的设计目标是: 在给定不同的控制对象时,选择适当的模拟控制器D(s), 使系统具有上式的开环传递函数。 例5.1 对于图5.2所示的二阶系统,设 按二阶工程设计法求模拟控制器D(s)。 解:设
n
Ai 1− e
例5.5 已知模拟控制器
i =1
− a iT
z
−1
= Ζ [D ( s ) ]
D (s) =
求数字控制器D(z)。 解: D ( z ) = Ζ [D ( s ) ] = 控制算法为:
PID控制原理与参数整定方法

PID控制原理与参数整定方法一、概述PID是比例-积分-微分控制的简称,也是一种控制算法,其特点是结构改变灵活、技术成熟、适应性强。
对一个控制系统而言,由于控制对象的精确数学模型难以建立,系统的参数经常发生变化,运用控制理论综合分析要耗费很大的代价,却不能得到预期的效果,所以人们往往采用PID调节器,根据经验在线整定参数,以便得到满意的控制效果。
随着计算机特别是微机技术的发展,PID控制算法已能用微机简单实现,由于软件系统的灵活性,PID算法可以得到修正而更加完善。
我们阳江基地有数以千计的采用PID控制的调节器,用于温度控制、压力控制、流量控制,在塑杯及灌装生产过程中,发挥着重要的作用。
因此,学习PID控制的基本原理,合理的设计PID控制系统,用好、维护好这些调节器,对提高产品质量,降低废品率,节约能源具有十分重要的意义。
本课程从系统的角度,采用多种分析方法,详细讲解经典PID控制的基本原理和PID参数的整定方法,简介现代数字PID控制思想,希望对大家使用PID调节器有所帮助。
二、调节系统的品质和特性一个调节系统的品质可以用静态品质和动态品质来衡量。
所谓静态品质就是系统稳定后,被控参数与给定值间的差值的大小。
偏差愈大则静差愈大,静差愈小静态品质愈好。
当系统受到扰动后或整定在一个新值时需要在较短时间内过渡到稳定,不发生振荡和发散,这便是衡量系统动态特性的指标。
一个好的调节系统应该二个品质都好。
但动静态品质往往是相互矛盾的,要静差小,系统的放大倍数就要大,系统放大倍数愈大则系统愈不稳定,即动态品质不好。
图1-1收敛型1图1-2收敛型2图1-3发散型落图1-4振荡型图1-1至1-4是几种典型的控制曲线,只有图1-1表示动静态品质都好。
一般的调节系统都具有惯性和滞后两种特性/只是大小不同而已。
这两个特性应从控制对象,控制作用这两个方面去理解。
弄懂以上关于调节系统的几个基本概念,对于理解PID控制的原理有很大的帮助。
PID控制原理详解及实例说明

PID控制原理详解及实例说明5.1 PID控制原理与程序流程5.1.1过程控制的基本概念过程控制――对生产过程的某一或某些物理参数进行的自动控制。
一、模拟控制系统图5-1-1 基本模拟反馈控制回路被控量的值由传感器或变送器来检测,这个值与给定值进行比较,得到偏差,模拟调节器依一定控制规律使操作变量变化,以使偏差趋近于零,其输出通过执行器作用于过程。
控制规律用对应的模拟硬件来实现,控制规律的修改需要更换模拟硬件。
二、微机过程控制系统图5-1-2 微机过程控制系统基本框图以微型计算机作为控制器。
控制规律的实现,是通过软件来完成的。
改变控制规律,只要改变相应的程序即可。
三、数字控制系统DDC图5-1-3 DDC 系统构成框图DDC(Direct Digital Congtrol)系统是计算机用于过程控制的最典型的一种系统。
微型计算机通过过程输入通道对一个或多个物理量进行检测,并根据确定的控制规律(算法)进行计算,通过输出通道直接去控制执行机构,使各被控量达到预定的要求。
由于计算机的决策直接作用于过程,故称为直接数字控制。
DDC 系统也是计算机在工业应用中最普遍的一种形式。
5.1.2 模拟PID 调节器一、模拟PID 控制系统组成图5-1-4 模拟PID 控制系统原理框图 二、模拟PID 调节器的微分方程和传输函数 PID 调节器是一种线性调节器,它将给定值r(t)与实际输出值c(t)的偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进行控制。
1、PID 调节器的微分方程 ⎥⎦⎤⎢⎣⎡++=⎰tDIP dt t de T dt t e T t e K t u 0)()(1)()( 式中 )()()(t c t r t e -= 2、PID 调节器的传输函数 ⎥⎦⎤⎢⎣⎡++==S T S T K S E S U S D D I P 11)()()( 三、PID 调节器各校正环节的作用1、比例环节:即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生控制作用以减小偏差。
离散电机PID控制及其MATLAB仿真

微分先行PID控制算法及仿真
• 微分先行PID控制的特点是只对输出量yout(k)进 行微分,而对给定值rin(k)不进行微分。这样, 在改变给定值时,输出不会改变,而被控量的变 化通常是比较缓和的。这种输出量先行微分控制 适用于给定值rin(k)频繁升降的场合,可以避免 给定值升降时引起系统振荡,从而明显地改善了 系统的动态特性。
• 需要说明的是,为保证引入积分作用后系统的稳 定性不变,在输入积分作用时比例系数Kp可进
行相应变化。此外,β值应根据具体对象及要求 而定,若β过大,则达不到积分分离的目的;β
过小,则会导致无法进入积分区。如果只进行 PD控制,会使控制出现余差。(为什么是β?)
抗积分饱和PID控制算法及仿真
• 积分饱和现象
• 系数f与偏差当前值∣e(k)∣的关系可以是线性的或 是非线性的,例如,可设为
1.3.8 变速积分算法及仿真
• 变速积分PID算法为:
• 这种算法对A、B两参数的要求不精确,参数整 定较容易。
1.3.8 变速积分算法及仿真
• 设被控对象为一延迟对象:
• 采样时间为20s,延迟时间为4个采样时间,即 80s,取Kp=0.45,Kd=12,Ki=0.0048,A=0.4, B=0.6。
在仿真过程中,可根据实 际情况,对控制器的输出 进行限幅:[-10,10]。
连续系统的数字PID控制仿真
• 本方法可实现D/A及A/D的功能,符合数字实时 控制的真实情况,计算机及DSP的实时PID控制 都属于这种情况。
• 采用MATLAB语句形式进行仿真。被控对象为一 个电机模型传递函数:
式中,J=0.0067,B=0.10
微分环节:differential coefficient反映偏差信号的变
电力拖动自动控制系统—运动控制系统(第四版)考试精选

1、恒转矩负载的特性:负载转矩T L的大小恒定,与ωm或n无关。
恒功率负载的特性:负载转矩与转速成反比,而功率为常数。
2、触发装置GT的作用:把控制电压Us转换成触发脉冲的触发延迟角a,用以控制整流电压,达到变压调速的目的。
3、晶闸管整流器运行中存在的问题:1)晶闸管是单向导电的,它不允许电流反向,给电动机的可逆运行带来困难。
2)晶闸管对过电压、过电流和过高的d u/dt与di/dt都十分敏感,其中任一指标超过允许值都可能在很短的时间内损坏晶闸管。
3)晶闸管的可控性是基于对其门极的移相触发控制,在较低运行时会引起电网电压的畸变,被称为“电力公害”。
4、电力公害:在较低速运行时,晶闸管的导通角很小,使得系统的功率因数变差,并在交流侧产生较大的谐波电流,引起电网电压的畸变,叫做电力公害。
5、稳态是指电动机的平均电磁转矩与负载转矩相平衡的状态。
6、电能反馈问题:当电动机工作在回馈制动状态时,将动能变为电能回馈给直流电源,但由于二极管整流器的单向导电性,电能不能通过整流装置送回交流电网,只能向滤波电容充电,这就是电能回馈问题。
1、转速闭环控制的好处:减小转速降落,降低静差率,扩大调速范围。
8、反馈控制的基本规律:1)比例控制的反馈控制系统是被调量有静差的控制系统。
2)反馈控制系统的作用是抵抗扰动,服从给定3)系统的精度依赖于给定和反馈检测的精度。
9、积分控制的优点:积分控制可使系统在无静差的情况下保持恒速运行,实现无静差调速。
10、比例调节器的输出和积分调节器的输出的区别:比例调节器的输出取决于输入偏差量的现状,而积分调节器的输出则包含了输入偏差量的全部历史。
11、有静差调速系统:对于比例控制的调速系统,该传递函数无积分环节,故存在扰动引起的稳态误差,称作有静差调速系统。
12、无静差调速系统:对于积分控制或比例积分控制的调速系统,该传递函数具有积分环节,所以由阶跃扰动引起的稳态误差为0,称作无静差调速系统。
离散系统的数字PID控制仿真
离散系统的数字PID控制仿真薛晓波目前,大多数工业对象的动态特性尚未被完全掌握,得不到精确的数学模型,难以满足控制理论分析的要求,在决定系统参数时,往往还需要依靠现场调试及经验,而PID调节器就充分显示了它的威力。
所以它的应用经久不衰,而且有所发展,应用范围更加广泛。
至今它仍是一种最基本的控制算法。
PID控制是最早发展起来的控制策略之一,由于其算法简单,鲁棒性好和可靠性高,被广泛应用于工业过程控制。
现在的工业控制系统大都采用数字控制系统。
数字PID控制系统就是把模拟PID控制算式离散化处理,便于系统用单片机或计算机实现控制。
在计算机过程控制领域中,数字PID调节器有着广泛的应用。
由于它具有确定的结构,所以只要研究它的参数整定规则即可。
数字PID控制系统是时间的离散系统,计算机对生产过程的控制是断续的过程,即在每一个采样周期内,传感器将所测数据转换成统一的标准信号后输入给调节器,在调节器中与设定值进行比较得出偏差值,经PID运算得出本次的控制量,输出到执行器后才完成了本次的调节任务。
在计算机控制系统中,PID控制器是通过计算机程序实现的,因此它的灵活性很大。
一些原来在模拟PID控制器中无法实现的问题,在引入计算机后,就可以得到解决,于是产生了一系列的改进算法,形成非标准的控制算法,以改善系统品质,满足不同控制系统的需要。
PID控制基本原理:PID调节器由比例调节器(P),积分调节器(I)和微分调节器(D)构成,它通过对偏差值的比例、积分和微分运算后,用计算所得的控制量来控制被控对象,下图所示为PID控制系统框图:其中R 为设定的期望值, y 为控制变量S 为实际输出值, e 为控制偏差(e=R-S)。
PID 调节器按其调节规律可分为比例调节、比例积分调节和比例积分微分调节等。
PID 算法是将描述连续过程的微分方程转化为差分方程,然后,根据差分方程编制计算程序来进行控制计算的,另外在PID 控制中,由于PID 算式选择的不同,最终所得到的控制效果是不同的。
3-4数字PI调节器

u( k ) = K P e( k ) + K ITsam ∑ e( i )
k
增量式PI调节器算法
i =1
∆u ( k ) = u ( k ) − u ( k − 1) = K P [e( k ) − e( k − 1) ] + K ITsam e( k )
(3-17)
PI调节器的输出可由下式求得
u (k ) = K P e( k ) + K ITsam ∑ e(i ) = K P e( k ) + u I ( k )
i =1
k
= K P e( k ) + K ITsam e( k ) + u I ( k − 1)
其中,Tsam为采样周期
(3-15)
u( k ) = K P e( k ) + K ITsam ∑ e( i )
×
R Tm s
1 Ce
• 系统简化
如果采用工程设计法,将电流内环矫正为典型 I 系统,则可将系统简化如下图所示:
Kαn* Kα n* + IId d I dL IdL −
ASR − Tsam Tsam Tsam sam
1− e s
− Tsams
1 Kβ 2TΣi s + 1
R C e Tm s
n
Kα Ton s + 1
−Tsam T n ∑
]
再令
Tsam λ w= j 2
λ 为虚拟频率
则开环虚拟频率传递函数为
( jτ1λ +1)( jτ 4λ +1)(1− jτ3λ) (3-38) GASR( jλ )Gobj( jλ) = K0 2 ( jλ) ( jτ 2λ +1)
第4章控制算法模拟调节器离散化方法

σ=1 Rez
S平面
第4章控制算法模拟调节器离散化
Z平面
22
方法
前向差分法有可能将S平面的稳定极点映射到Z平面的单 位圆外 ——原来设计的在模拟条件下稳定的系统,利用前向差分转变 为数字控制器后,系统可能变得不稳定。 故一般不用前向差分法。
第4章控制算法模拟调节器离散化
23
方法
(2) 后向差分法
2
2
离散后的控制器脉冲传递函数
D(z)U(z) E(z)
2
1 z1a
T z1
2z1 21z1
令
sTz1T1z1
(4.3)
第4章控制算法模拟调节器离散化
30
方法
则D(z)与模拟调节器GC(s)具有相同的形式。 ——可认为从s平面到z平面的映射函数为
D(z)GC(s)s2z1 Tz1
(4.4)
考察该映射对稳定性的影响。
u(kT),再经数/模转换及保持器转换为连续控制量u(t),作 用到连续的被控对象上,以控制被控对象的输出y(t)。
第4章控制算法模拟调节器离散化
2
方法
设计计算机控制系统,主要是设计数字控制器,使图所示的闭 环控制系统既要满足系统的期望指标,又要满足实时控制的要 求。
注:现在的计算机控制系统:一般给定信号是数字信号
第4章控制算法模拟调节器离散化
7
方法
主要方法: 依据性能指标要求,可以基本确定闭环传递函数。 有了开环传递函数G(s) 有了闭环传递函数GB(s) 或叫做 Φ(s)
(s) D(s)G(s) 1D(s)G(s)
设计过程就是寻找D(s),使得在该调节器(控制器)的作用下, 闭环系统的性能满足我们的要求。
位置式数字PI调节器算法
数字控制器
专为电机控制设计的微处理器: 除了带有A/D转换器、通用I/O和通 信接口, 还带有一般微机并不具备的故障保 护、数字测速和PWM生成功能,
如:Intel 8X196MC系列或 TMS320X240系列等。
双闭环直流调速系统 的控制软件
微机数字控制双闭环直流调速 系统的软件有:
主程序 初始化子程序 中断服务子程序等
控制软件更改灵活方便。 具有信息存储、数据通信和故障诊断
等功能。
离散化和数字化
微机数字控制系统的主要特点 是离散化和数字化。
离散化f(t)
对模拟的连
续信号采样形成
O
f(nT)
一连串的脉冲信
原信号
t
采样
号,即离散的模
拟信号,这就是
离散化。
O 1 2 34 …
n
数字化N(nT)
离散信号经保
持器保持后,还须
经过数字量化,即
用一组数码(如二 O
n
进制码)来逼近离
保持
散的模拟信号。
Na(nT)(电压)Nd(nT)(数码)
离散化和数字化的负
面效应
离散化:时间上的不连续性; 数字化:量值上的不连续性。
负面效应: 产生量化误差,影响控制精度和平滑
性。 滞后效应,提高控制系统传递函数分母
的阶次,使系统的稳定裕量减小,甚至 会破
坏系统的稳定性。
3.1.1数字量化
量化的原则是:在保证不溢出 的前提下,精度越高越好。
存储系数计显算机示内量部存化储值的精度,其 定义为 K 物理量的实际值
微机数字控制系统中的存储系数相当于 模拟控制系统中的反馈系数。
3.1.2 采样频率的选 择
3.5-数字控制算法

等效变换后与基本的PID算 法相比,增加了二阶滤波器。 若Ti ≫Td有:
1 2 (1 Ti s )(1 Td s ) 1 Ti s Ti Td s 1
可见比例先行 PID 算法是在 微分先行基础上又增加了 1 一阶 惯性环节。 1 Ti s
r(t) + -
e(t)
PID位置算法
调节阀
被控对象
y(t)
数字PID增量式控制算法
所谓增量式PID,是对位置式PID取增量,这时数字控制器 输出的是相邻两次采样时刻所计算的位置值之差,即 y n y n y n 1 Td 1 T {( x n x n1 ) xn ( x n 2 x n1 x n 2 )} P Ti T
3.5.1 基本PID的离散表达式
基本模拟PID调节器的时域模型:
y( t ) 1 1 [ x( t ) P TI
x(t )dt Td
dx( t ) ] dt
离散化方法: 连续信号采样: 连续信号f (t)通过采样周期 为ΔT的理想采样(脉宽=0) 后可得到采样信号f*(t) :
Td s Td Y ( s) X ( s) Y ( s) sY ( s ) Td sX ( s ) Td Kd 1 s Kd
写成差分方程有:
Td yn yn1 xn xn1 yn Td Kd T T
不完全微分的PID算法
整理有:
yn
Td Td T Kd
数字PID控制算法的改进
在实际应用中,对于一些具有特殊性质的对象采用常规 的PID控制器,其实际控制效果并不理想。因此需要针对实 际特点,对PID算式进行适当的改进,从而提高控制质量。
数字仪表的控制算法用软件实现方便,比模拟仪表有很大 的灵活性和优越性。容易对基本的 PID运算进行修改,以改 善操作性能和控制品质,适应不同工况。
计算机控制技术PID调节器的数字化实现教学PPT
y
1 Ti
e(t)dt
(5-2)
式中:Ti是积分时间常数,它表示积分速度的大小, Ti越大,
积分速度越慢,积分作用越弱。 积分作用的响应特性曲线如 图5-2所示。
PID调节器的数字化实现
积分作用的特点是调节器的输出与偏差存在的时间有关, 只要有偏差存在,输出就会随时间不断增长,直到偏差消除, 调节器的输出才不会变化。因此,积分作用能消除静差,但 从图5-2中可以看出,积分的作用动作缓慢, 而且在偏差刚 一出现时,调节器作用很弱,不能及时克服扰动的影响, 致 使被调参数的动态偏差增大,调节过程增长, 它很少被单独 使用。
PID调节器的数字化实现
模拟控制器的离散化方法
从信号理论角度来看,模拟控制器 就是模拟信号滤波器应用于反馈控制系 统中作为校正装置。滤波器对控制信号 中有用的信号起着保存和加强的作用, 而对无用的信号起着抑制和衰减的作用。 模拟控制器离散化成的数字控制器,也 可以认为是数字滤波器。
PID调节器的数字化实现
微分调节器的微分方程为
de(t) y TD dt
式中TD为微分时间常数。
(5-4)
PID调节器的数字化实现
微分作用响应曲线如图5-4所示。从图中可以看出,在t=t0 时加入阶跃信号,此时输出值y变化的速度很大:当t>t0时,其 输出值y迅速变为0。微分作用的特点是,输出只能反应偏差输 入变化的速度,而对于一个固定不变的偏差, 不管其数值多 大,根本不会有微分作用输出。因此,微分作用不能消除静差, 而只能在偏差刚刚出现时产生一个很大的调节作用。 它一般 不单独使用,需要与比例调节器配合使用,构成PD调节器。 PD调节器的阶跃响应曲线如图5-5所示。
PID调节器的数字化实现
数字PI调节器

Tsam—转速环采样周期。
系统模型中
转速、电流调节器均采用数字式PI调节器
采样环节可表示为带放大的零阶保持器。
式中Tsam—转速环采样周期。
系统简化
若采用工程设计法,将电流内环校正为典I系统,则可将系统简化如下图3-19所示:
•电流内环的等效传递函数
其中,电流反馈系数换成电流存储系数K
离散系统的开环脉冲传递函数
•w变换过程
如果要用利用连续系统的对数频率法来设计调节器参数,应先进行w变换,即令
则
•系统w’域模型——虚拟频率传递函数
再令
为虚拟频率,则开环虚拟频率传递函数为
虚拟频率传递函数特性的参数
开环放大系数
转折频率为(单位为s-1)
当控制对象及采样频率确定后,Kz、2、3、4均为已知常数,但1和K0待定。
(2)数字系统设计方法
先将系统对象离散化,按数字系统直接设计数字调节器。
数字系统分析方法有:
z变换方法w变换方法扩展w变换方法
z变换方法
w变换方法
扩展w变换方法
•双闭环直流调速系统的数字调节器设计原则
在直流调速系统中,电枢电流的时间常数较小,电流内环必须有足够高的采样频率,而电流调节算法一般比较简单,采用较高的采样频率是可能的。因此电流调节器一般都可以采用间接方法设计,即先按连续控制系统设计,然后再将得到的调节器数字化。
结构清晰,P和I两部分作用分明,参数调整简单明了,但需要存储的数据较多。
积分部分:
比例部分:
PI调节器的输出
增量式PI调节器算法
PI调节器的输出
•限幅值设置
与模拟调节器相似,在数字控制算法中,需要对u限幅,这里,只须在程序内设置限幅值um,当u(k)>um时,便以限幅值um作为输出。
模拟PID 调节器设计及数字化实现
模拟PID 调节器设计及数字化实现摘要:本文首先对现代工控系统中比较常用的PID 调节器原理作了详细的阐述,然后对各个环节进行了硬件电路的设计,并通过MATLAB、EWB 等EDA 软件对各个环节及整个调节电路进行了验证摘要:本文首先对现代工控系统中比较常用的PID 调节器原理作了详细的阐述,然后对各个环节进行了硬件电路的设计,并通过MATLAB、EWB 等EDA 软件对各个环节及整个调节电路进行了验证仿真。
通过分析,得出了PID 调节器的优点及缺陷。
最后,对数字化实现PID 调节器的工作过程进行了概述。
关键词: PID;硬件设计;数字实现;EDA 仿真引言随着工业自动化的不断发展,人们对于生产过程的要求越来越高,这就促使人们在生产实践中不断探求新的控制方案。
而在控制方案的选择中,控制规律的选择尤为重要。
控制规律的恰当与否将直接决定生产线的安全、产品的质量以及生产的效率等。
据不完全统计,目前在各种工业控制中,PID 调节或基于PID 调节的控制方式占90%。
调节规律作为应用时间最长、生命力最强的控制方式,主要有以下优点:(1)原理简单,使用方便(2)适应性强(3)鲁棒性强。
既然PID 调节在工业控制中的地位如此重要,那么,PID 的设计问题就显得颇为重要了。
硬件电路设计方案控制器是一种线性控制器。
它根据给定值x (t )与实际输出值y (t )构成控制偏差e(t),即表示e(t) = x (t) ? y (t)。
将偏差的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制,故称PID 控制器。
其控制规律为模拟PID 调节器主要由三个部分组成,即P 调节、I 调节、D 调节,当然,作为工业应用,还必须有输入、输出电路,手动调节电路,下面给出各部分电路的硬件设计方案。
输入电路主要作用:获得偏差信号,并以VB=10V 为参考点进行电平迁移。
分析:如图2 所示,设A1 为理想放大器,即输入阻抗无穷大,输出阻抗为零。
微机控制技术复习题(部分参考答案)
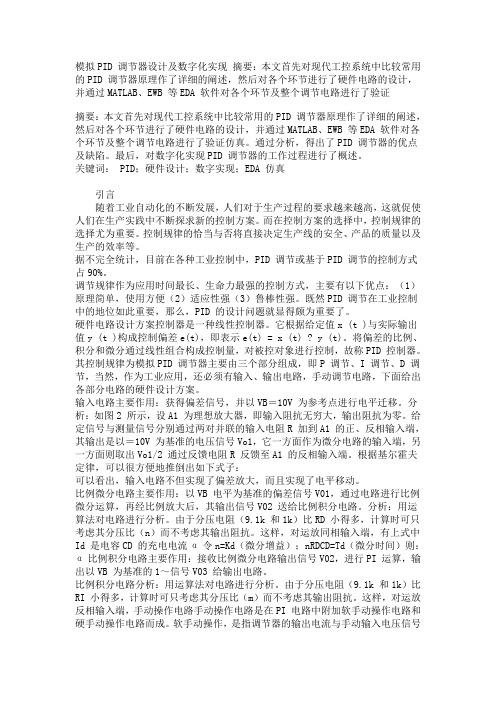
一、 填空题:1、8位D/A 转换器的分辩率是 满刻度值/2^8 。
2、数字调节器与模拟调节器相比更能实现 复杂 控制规律。
3、计算机具有 分时 控制能力,可实现多回路控制。
4、为了实现最少拍有波纹控制,闭环脉冲传递函数)(Z Φ中应包含)(Z G 的 所有单位圆上和单位圆外 零点,为了实现最少拍无波纹控制, 闭环脉冲传递函数)(Z Φ中应包含)(Z G 的 所有 零点。
5、按最少拍原则设计的系统是 时间 最优系统。
6、最少拍无波纹与最少拍有波纹系统相比其闭环脉冲传递函数)(Z Φ中1-Z的阶次要 高一些,调整时间要 长 一些。
7、大林把这种控制量以 1/2 的采样频率振荡的现象称为“ 振铃 ”。
8、分析结果表明:)(Z U 与)(Z R 间的脉冲传递函数表达式中,包含有Z 平面单位圆内 接近-1 的负实数极点,则会产生 振铃现象 。
9、如果按大林提出的简单修正算法来防止振铃现象,则对系统的稳态输出 无 影响,但对系统的动态性能 有 影响。
10、数字控制器的模拟化设计法是在采样周期 必须足够小,除必须满足采样定例外采样周期的变化对系统性能影响不大 的条件下使用的。
11、数字量输出保持一般有两种方案,一种是 输出通路设置一个D/A 转换器的结构形式(数字量保持方案) ,一种是 多个输出通路公用一个D/A 转换器的结构式(模拟量保持方案) ,前者与后者相比D/A 转换器 使用数量多 。
12、常用的A/D 转换器有 计数器式 , 双积分式 , 逐次逼近式 。
13、为了消除稳态误差,)(Z e Φ的表达式中须含有因式 (1-z^-1)^q 。
补充填空题:1、常用的I/O 控制方式是 程序控制方式 , 中断控制方式 ,直接存储器存取方式 。
2、微型计算机控制系统中解决中断优先级的办法是 软件查询方式 , 雏菊链法 , 专用硬件方式 。
3、满足实时控制要求的使用条件是 所有外围设备的服务时间的总和必须小于或等于任意外围设备的最短响应时间 。
数字PI控制器的原理仿真与数字实现
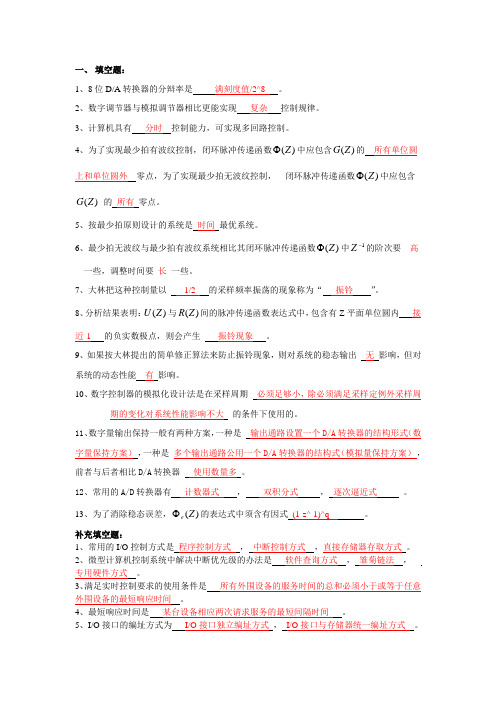
数字PI控制器的原理仿真与数字实现摘要:数字控制技术在控制领域的应用日益广泛。
自模拟比例积分PI控制器发展而来的数字PI控制器也形成了一种经典的数字控制结构,其数学模型可以从模拟PI控制器导出。
本文从模拟PI控制器出发,推导了数字PI控制器的模型、传函及后向差分方程,给出了实现数字PI的流程图。
以某逆变器为例,给出了数字PI的仿真结果。
关键词:比例积分控制器数字控制后向差分方程流程图仿真1 引言闭环控制系统中常用的控制器有比例P 控制器,比例积分PI控制器,比例积分微分PID控制器。
从结构及性能上看,P控制器最简单,但对于阶跃输入响应由于比例环节放大倍数不可能为∞,故对阶跃输入指令值的跟踪存在静差。
PI和PID控制器中都存在一个积分环节,属于和控制对象一起构成I型系统[1],在阶跃指令作用下都没有稳态误差,但相对于PI控制器,PID控制器结构复杂,故在动态和稳态性能指标要求不太高的情况下,一般都采用PI控制器。
随着数字控制技术在控制领域的广泛应用,自模拟PI控制器发展而来的数字PI控制器也形成了一种经典的控制结构,其数学模型可以从模拟PI控制器导出。
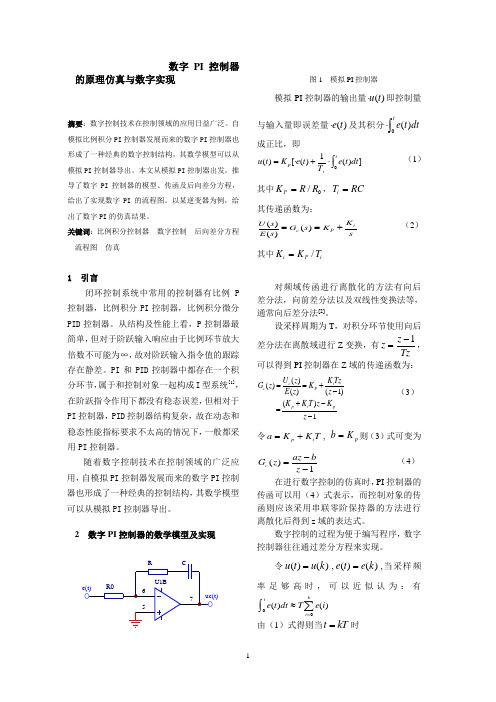
2 数字PI控制器的数学模型及实现图1 模拟PI控制器模拟PI控制器的输出量()u t⋅即控制量与输入量即误差量()e t⋅及其积分()te t dt⋅⎰成正比,即1()[()()]tPiu t K e t e t dtT=⋅+⋅⎰(1)其中/PK R R=,iT RC=其传递函数为:()()()ic PKU sG s KE s s==+(2)其中/i P iK K T=对频域传函进行离散化的方法有向后差分法,向前差分法以及双线性变换法等,通常向后差分法[2]。
设采样周期为T,对积分环节使用向后差分法在离散域进行Z变换,有1zzTz-=,可以得到PI控制器在Z域的传递函数为:()()()(1)()1c ic Pp i pU z K TzG z KE z zK K T z Kz==+-+-=-(3)令p ia K K T=+, pb K=则(3)式可变为()1caz bG zz-=-(4)在进行数字控制的仿真时,PI控制器的传函可以用(4)式表示,而控制对象的传函则应该采用串联零阶保持器的方法进行离散化后得到z域的表达式。
关于电子油泵中PI控制的应用

关于电子油泵中PI控制的应用刘义强;Kim Choonghyeo;黄伟山;孙家振;李军;王瑞平【摘要】文章主要介绍PI控制对电子油泵中的应用,并认为通过PI控制能精准地控制电子油泵转速,从而有效改善变速器性能与使用寿命.在7速湿式双离合变速器中(7DCT)[1],离合器的冷却和摩擦副的润滑主要通过电子油泵供油来完成,而电子油泵的转速直接影响供油量,所以PI 控制对电子油泵有着重要意义.电子油泵由一个直流无刷电机[2]驱动,而直流无刷电机通过两个串联的PI控制环控制[3].数据对比显示,通过调节两个PI环的P、I参数可以获得比无PI控制的系统更好的转速动态响应,从而能够更加精准地控制变速器油流量,有效保护变速器并延长其使用寿命.【期刊名称】《汽车实用技术》【年(卷),期】2017(000)018【总页数】4页(P161-164)【关键词】湿式双离合变速器;离合器;电子油泵;PI控制【作者】刘义强;Kim Choonghyeo;黄伟山;孙家振;李军;王瑞平【作者单位】宁波吉利罗佑发动机零部件有限公司,浙江宁波 315336;宁波吉利罗佑发动机零部件有限公司,浙江宁波 315336;宁波吉利罗佑发动机零部件有限公司,浙江宁波 315336;宁波吉利罗佑发动机零部件有限公司,浙江宁波 315336;宁波吉利罗佑发动机零部件有限公司,浙江宁波 315336;宁波吉利罗佑发动机零部件有限公司,浙江宁波 315336;浙江吉利罗佑发动机有限公司,浙江宁波 315336【正文语种】中文【中图分类】U467Abstract:This paper is mainly focusing on the application of PI control in the electronic oil pump and promoting the idea that PI control can effectively improve the transmission performance and service life through accurate control of electronic pump speed. In seven-speed wet dual-clutch transmission (DCT), the main task of cooling clutch and lubrication is finished by electronic oil pump, and the speed of electronic oil pump directly affect the oil supply, so the PI control is very important for the electronic oil pump. Electronic oil pump is driven by a brushless dc motor, brushless dc motor is controlled by two series of PI control loop. The data comparison shows that adjusting the parameters P and I can get better response than no PI control system dynamic response speed, which can control the transmission oil flow more accurately, protect the transmission and increase the service life.Keywords: Wet dual-clutch transmission; clutch; electronic oil pump; PI controlCLC NO.: U467 Document Code: A Article ID: 1671-7988 (2017)18-161-04 由于变速器油的流量对变速器摩擦副的润滑和冷却有着直接影响,所以准确控制油流量能够有效改善和提高变速器性能,并延长其使用寿命。
模拟PI调节器的离散化实现

模拟PI 调节器如图3.9所示。
比例积分被控对象r(t)e(t)u(t)y(t)
图3.9 模拟PI 调节器
其模拟积分公式如式(3.13)所示:
0t 0I P dt )t (e T 1)t (e K )(μμ+⎥⎦⎤⎢⎣⎡+
=⎰t (3.13)
将上式离散化变成式(3.14):
0k 0
j I P P )j (e T K )k (e K )k (μμ++=∑=(3.14) 显然式(3.14)的计算量过大,处理器计算每一次的μ(k )值都要进行k 次累加计算,需要更简洁的计算方式。
因此,写出k-1次的差分方程如式(3.15)所示:
01-k 0
j I P P )j (e T K )1-k (e K )1-k (μμ++=∑=(3.15) 用式(3-14)减去式(3-15),由此得到式(3.16):
[])k (e T K )1k (e )k (e K )1-k ()k (I P P +--=-μμ(3.16)
整理得到式(3.17):
)1k (e K )k (e )T K K ()1-k ()k (P I P P --++=μμ(3.17)
式(3.17)在计算时只需记住上一次的μ(k )和e (k )的值就可以得出很简单的计算出当前μ(k )的值,因而更具实用性。
可以令I P P K T K K K +=,将式(3.17)记为式(3.18):
即:)1k (e K )k (e K )1-k ()k (P K --+=μμ(3.18)
由此我们得到一个简单且易于计算的PI 调节器的离散方程。