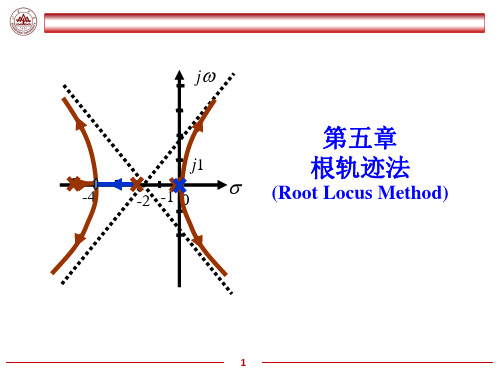
5第五节控制系统的根轨迹分析法_图文
合集下载
自动控制原理第5章根轨迹分析法

04
CATALOGUE
根轨迹分析法的限制与挑战
参数变化对根轨迹的影响
参数变化可能导致根轨迹的形状和位置发生变化 ,从而影响系统的稳定性和性能。
对于具有多个参数的系统,根轨迹分析可能变得 复杂且难以预测。
需要对参数变化进行细致的监测和控制,以确保 系统的稳定性和性能。
复杂系统的根轨迹分析
对于复杂系统,根轨 迹分析可能变得复杂 且难以实现。
02
CATALOGUE
根轨迹的基本概念
极点与零点
极点
系统传递函数的极点是系统动态 特性的决定因素,决定了系统的 稳定性、响应速度和超调量等。
零点
系统传函数的零点对系统的动 态特性也有影响,主要影响系统 的幅值和相位特性。
根轨迹方程
根轨迹方程是描述系统极点随参数变 化的关系式,通过求解根轨迹方程可 以得到系统在不同参数下的极点分布 。
05
CATALOGUE
根轨迹分析法的改进与拓展
引入现代控制理论的方法
状态空间法
将根轨迹分析法与状态空间法相结合,利用状态空间法描述系统的动态行为,从而更全 面地分析系统的稳定性。
最优控制理论
将根轨迹分析法与最优控制理论相结合,通过优化系统的性能指标,提高系统的稳定性 和动态响应。
结合其他分析方法
根轨迹方程的求解方法包括解析法和 图解法,其中图解法是最常用的方法 。
根轨迹的绘制方法
手工绘制
通过选取不同的参数值,计算对应的极点,然后绘制极点分布图。这种方法比较繁琐,但可以直观地了解根轨迹 的形状和变化规律。
软件绘制
利用自动控制系统仿真软件,如MATLAB/Simulink等,可以方便地绘制根轨迹图,并分析系统的动态特性。
根轨迹法(自动控制原理)ppt课件精选全文完整版

1 K (s z1 )( s z2 )....( s zm ) 0 (s p1 )( s p2 )....( s pn )
课程:自动控制原理
第4章 根轨迹法
➢ 以K为参变量的根轨迹上的每一点都必须满足以上方程, 相应地,称之为‘典型根轨迹方程’。
也可以写成
m
n
(s zl ) K (s pi ) 0
可见,根轨迹可以清晰地描绘闭环极点与开环增益K之间的 关系。
课程:自动控制原理
第4章 根轨迹法
2.根轨迹的基本条件
❖ 考察图示系统,其闭环传递函数为:
Y(s) G(s) R(s) 1 G(s)H(s)
闭环特征方程为:
1 G(s)H(s) 0
➢ 因为根轨迹上的每一点s都是闭环特征方程的根,所以根轨 迹上的每一点都应满足:
l 1
i 1
对应的幅值条件为:
相角条件为:
n
( s pi ) K i1
m
(s zl )
l 1
m
n
(s zl ) (s pi ) (2k 1)180
k 1,2,
l 1
i 1
课程:自动控制原理
第4章 根轨迹法
❖ 上述相角条件,即为绘制根轨迹图的依据。具体绘制方法 是:在复平面上选足够多的试验点,对每一个试验点检查 它是否满足相角条件,如果是则该点在根轨迹上,如果不 是则该点不在根轨迹上,最后将在根轨迹上的试验点连接 就得到根轨迹图。
显然,位于实轴上的两个相邻的开环极点之间一定有分离 点,因为任何一条根轨迹不可能开始于一个开环极点终止 于另一个开环极点。同理,位于实轴上的两个相邻的开环 零点之间也一定有分离点。
课程:自动控制原理
第4章 根轨迹法
课程:自动控制原理
第4章 根轨迹法
➢ 以K为参变量的根轨迹上的每一点都必须满足以上方程, 相应地,称之为‘典型根轨迹方程’。
也可以写成
m
n
(s zl ) K (s pi ) 0
可见,根轨迹可以清晰地描绘闭环极点与开环增益K之间的 关系。
课程:自动控制原理
第4章 根轨迹法
2.根轨迹的基本条件
❖ 考察图示系统,其闭环传递函数为:
Y(s) G(s) R(s) 1 G(s)H(s)
闭环特征方程为:
1 G(s)H(s) 0
➢ 因为根轨迹上的每一点s都是闭环特征方程的根,所以根轨 迹上的每一点都应满足:
l 1
i 1
对应的幅值条件为:
相角条件为:
n
( s pi ) K i1
m
(s zl )
l 1
m
n
(s zl ) (s pi ) (2k 1)180
k 1,2,
l 1
i 1
课程:自动控制原理
第4章 根轨迹法
❖ 上述相角条件,即为绘制根轨迹图的依据。具体绘制方法 是:在复平面上选足够多的试验点,对每一个试验点检查 它是否满足相角条件,如果是则该点在根轨迹上,如果不 是则该点不在根轨迹上,最后将在根轨迹上的试验点连接 就得到根轨迹图。
显然,位于实轴上的两个相邻的开环极点之间一定有分离 点,因为任何一条根轨迹不可能开始于一个开环极点终止 于另一个开环极点。同理,位于实轴上的两个相邻的开环 零点之间也一定有分离点。
课程:自动控制原理
第4章 根轨迹法
自动控制第五章根轨迹法
15
绘制根轨迹的规则
【例5-2】已知负反馈系统的开环传递函数为:
解:(1)根轨迹的分支数和对称性 开环极点分别为: 系统的根轨迹有三条分支 (2)根轨迹的起点与终点 起始于系统的三个开环极点,并趋向于无穷远处
K1 Kb
j Kc
K1
(3)根轨迹的渐近线
Kc K1
16
绘制根轨迹的规则
闭环特征根s1,s2 随着K1值得 改变而变化。
(1) K1= 0:s1 = 0,s2 = 2,是根轨迹的起点,用“”表示。 j K1 (2) 0 < K1<1 :s1 ,s2 均是负实数。 K1 s1 ,s2 。 s1从坐标原点开 始沿负实轴向左移动; s2从(2, K1= 0 K1= 0 K1=1 j0)点开始沿负实轴向右移动。 1 0 2 (3) K1= 1: s1 = s2 = 1,重根。
+
﹣
K s(0.5s+1)
C(s)
式中,K为系统的开环比例系数。 K1 = 2K 称为系统的开环 根轨迹增益。
系统的闭环传递函数为:
K1 ( s) 2 s 2s K1
系统的闭环特征方程为: s2 + 2s + 2K1 = 0
4
一、根轨迹
用解析法求得系统的两个闭环特征根为:
s1,2 1 1 K1
K1
分离角为:
Kb
Kc K1
17
绘制根轨迹的规则
一般情况下,如果根轨迹位于实轴上相邻的开环极点之间, 则在这两个极点之间至少存在一个分离点;同样,如果根 轨迹位于实轴上两个相邻的开环零点之间(其中一个可在 无穷远处),则这两个零点之间至少存在一个汇合点。
自动控制原理--控制系统的根轨迹分析及特殊根轨迹

j1
s0
j1
jk
s sk
j1
jk
单位阶跃响应为
n
y(t) A0 Akeskt k 1
m
m
Ks zi Kzi
A0
i1 n
s sj
i1 n
GB(0)
sj
j1
s0
j1
m
m
K s zi
Ak
i1 n
s sj
1 s
K sk zi
i1 n
sk sk sj
jk
1
s2
100 8s 100
4 3
os1
1.5
1.7
可求得 0.4, ,n 10
s3
所以 % e 1 2 100% 25%,ts (s3.)5 n 3.5 4 0.9
j
0
利用根轨迹分析控制系统的性能
例11 分析K的变化对系统稳定性的影响
K (s 3) G(s)H (s) s(s 5)(s 6)(s2 2s 2)
增加开环极点的影响 增加极点对根轨迹形状的影响
增加开环零点的影响 增加零点对根轨迹形状的影响
例9 已知某系统闭环传递函数
GB (s) 0.67s 1
1 0.01s2
0.08s 1
试计算在单位阶跃输入时的系统输出超调量 % 和调节时间t。s
解:该闭环系统有三个极点,s1 1.5, s2,3 零4 、j9.2极点 分布如右图。
系统稳定的K的范围为: 0<K<35
例12 分析K的变化对系统的影响。设负反馈系统的开环传递函数为
K s z G(s)H(s) ss p
z p
求系统闭环根轨迹,并分析 p 2, 时z系 统4 的动态性能。
自动控制理论 线性系统的根轨迹法

z1
p3
3
1
p2
s2
s1
p1 s3
4
z2
2
p4
先看试验点s1点: ①成对出现的共轭极点p3、 p4对实轴上任意 试探点构成的两个向量的相角之和为0°; ②成对出现的共轭零点z1、 z2对实轴上任意试探点构成的两个向量的 相角之和为0°; ③试探点左边的极点p2对试探点构成的向量的相角为0°; ④试探点右边的极点p1对试探点构成的向量的相角为180°; 所以s1点满足根轨迹相角条件,于是[-p2 ,-p1]为实轴上的根轨迹。 再看s2点:不满足根轨迹相角条件,所以不是根轨迹上的点。
2、根轨迹的对称性
一般物理系统特征方程的系数是实数,其根必为实根或共 轭复根。即位于复平面的实轴上或对称于实轴。
3、根轨迹的支数、起点和终点: n阶特征方程有n个根。当 K* 从0到无穷大变化时,n个根
在复平面内连续变化组成n支根轨迹。即根轨迹的支数等于系统 阶数。
线性系统的根轨迹法>>根轨迹绘制的基本法则
j 1
i 1
n
d ln (s p j )
d ln m (s zi )
j1
i1
ds
ds
d
n j 1
ln(s
p j )
d
m i 1
ln(s
zi )
ds
ds
n d ln(s p j ) m d ln(s zi )
j 1
ds
i 1
ds
n
1
m
1
j1 s p j i1 s zi
设 K* Kgd 时,特征方程有重根 d ,则必同时满足
F(d ) 0 和 F'(d ) 0
控制系统的根轨迹分析方法 自控原理 教学PPT课件

P3×
分别起始于p1, p2, p3,4,
P2
终止于无穷远。
×
-2
Im(s)
× 0 P1
Re(s)
根据规则四、实轴上存在
根轨迹是从-2到0之间。
P4×
例4-2-6
p1=0, p2= -2, p3,4= -1±j2
根据规则五、n-m=4条渐近线
与实轴交点: 渐近线相角分别为:
P3×
Im(s)
P2 ×
j5.66
×
-j5.66
例4-2-5 作
的根轨迹。
该系统 n=3 ,m=1。
有三个开环极点:
一个零点:
根据规则一、二、三: 该根轨迹有三个分支,
分别起始于p = 0(两条)和p = -12处,
有一个分支终止于z = -1,
另两个分支趋于无穷远。
× -12 -6 -4
根据规则四:
实轴上存在根轨迹是从-12到-1之间。
s1是分离点,s2是会合点。 ×
-12 -6
作完业整:的A绘-4-出7,根A轨-4-迹11,如图4-9所示。
看书p130,表4-1常规根轨迹。
●× -4 -2
图4-9
例4-2-6
分析:n=4,m=0。
根据规则一、二、三、有四个极点:
p1=0, p2= -2, p3,4= -1±j2
该根轨迹共有四个分支,
例如系统的开环零、极点分布如图。
要判断 和 之间的线段是否存
在根轨迹,取实验点
开环共轭极点和零点提供的相角 相互抵消,G(s0)的相角由实轴上的 开环零极点决定。 。
×
● ● × ××
﹣5
﹣2 ﹣1 0
处在G(s0)左边的开环零极点提供的角度 × 均为零, 相角条件由其右边的零极点决定。
控制系统的根轨迹分析——自动控制原理

欠阻尼时共轭特征根为 s1,2 n j 1 2n
j 1 2n
闭环极点的张角 为:
n
cos
n
, cos1
( 1 2n )2 ( n )2
称为阻尼角。斜线称为等阻尼线。而根据二阶系统性
能,在等阻尼线上,系统的超调量、衰减率也是相等的。
根轨迹图分析
根据根轨迹图定量估算系统动态性能
-8
-6
-4
-2
0
2
4
6
8
Real Axis
开环零极点对根轨迹的影响
❖ 增加开环极点:
增加的极点将对原根轨迹产生排斥作用,使原根 轨迹向背离所增极点的方向变形。
Root Locus 5
4
3
2
Imaginary Axis
1
0
-1
-2
-3
-4
-5
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Real Axis
1
s(s 4)(s 6) s1.2 j2.1
解得:kg 44
由于闭环极点之和等于开环极点之和,所以另一个闭环极点 为: p3 7.6
闭环单位阶跃响应
Amplitude
Step Response 1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Time (sec)
根轨迹图分析
根据根轨迹图分析系统的稳定性 ✓ 闭环特征根在左半平面则稳定; ✓ 闭环特征根在右半平面则不稳定; ✓ 闭环特征根在虚轴上则临界振荡(无阻尼); ✓ 一组闭环特征根如果有在右半平面的不稳定值,
控制系统的根轨迹分析法资料PPT课件

由:
D' (s)
k gd
N '(s)
|s d
可以求得分离点s=-2.3557 。
近似求法:分离点在[-4,0]之间。
s0
-0.5 -1 -1.5 -2.0 -2.5 -3 -3.5 -4
kgd 0
1.628 3
5.971 8.80 9.375 7.457 3.949
kgd 的最大值为9.375,这时s=-2.5,是近似分离点。 第12页/共43页
s3
-7.6 -6 -4
Im
s1 2.08
-1.2
Re
0
s2 -2.08
(1) 判断闭环极点-1.20±j2.08是不是系统的主导极点: Im
Gk (s1 ) 1 2 3 s1 (s1 4) (s1 6)
s1 2.08
(180 tg 1 2.08 tg 1 2.08 tg 1 2.08 ) 180
对应根轨迹增益的计算:
|
s(s
kg 4)( s
6)
| 1 s1.2 j 2.08
k g 44
第20页/共43页
4.4.3 利用根轨迹估算系统的性能
(2) 估算系统的性能指标:
系统的闭环传递函数为
(s)
44
(s 1.2 j2.08)(s 1.2 j2.08)(s 7.6)
化简为
(s)
利用根轨迹可以清楚的看出开环根轨迹增益或其他开环系
统参数变化时,闭环系统极点位置及其瞬态性能的改变情况。
以二阶系统为例:开环传递函数为 Gk
闭环传递函数为(s)
s2
n2 2 n s
n2
(s)
n2 s(s 2
)
自动控制理论第五章
kg K 2K s (0.5s 1) s ( s 2) s ( s 2)
k g 2K
开环有两个极点: p1= 0, p2=-2 开环没有零点。 闭环特征方程为: D(s) = s2 +2s + kg = 0 s 解得闭环特征根(亦即闭环极点) s1 1 1 k g ;2 1 1 k g 可见,当kg 变化,两个闭环极点也随之连续变化。 当kg 从0→∞变化时,直接描点作出两个闭环极点的变化轨迹
(1)当 kg = 0时,s1 = 0、s2 = -2,此时闭环极点 就是开环极点。 (2)当0<kg<1时,s1、s2均为负实数,且位于负 实轴的(-2,0) 一段上。 (3)当kg = 1时,s1 = s2 = -1,两个负实数闭环极 点重合在一起。 (4)当1<kg<∞时,s1,2 =-1± j k g 1 ,两个闭 环极点变为一对共轭复数极点。s1、s2的实部不随kg 变化,其位于过(-1,0)点且平行于虚袖的直线 上。 (5)当kg=∞时, s1 = -1+ j∞、s2 = -1-j∞, 此时s1、s2将趋于无限远处。
例:求上例中根轨迹上
s2 (0.5, j1)
点对应的kg 。
k 解 :g s2 p1 s2 p2 0.5 j 0 0.5 j 1 1.118 1.118 1.25 s2 p1 、 s2 p2 也可以用直尺测量向量的长度。
5.2 绘制根轨迹的基本规则
不符合相角条件, s1不在根轨迹上。
满足相角条件, s2在根轨迹上。
2. 用幅植条件确定kg的值 幅值条件:
n
kg
s p
j 1 m i 1
j
s zi
第5章-控制系统根轨迹分析.
3.开环零点对根轨迹的影响
5.4 基于MATLAB的根轨迹分析
1.阶跃响应与开环增益的关系
例1:已知系统结构如下图,试画出K:0→∞
时闭环根轨迹,并分析K对系统动态过程的影响。
Rபைடு நூலகம் s )
K ( s 4) s ( s 2)
C (s)
5.4 基于MATLAB的根轨迹分析
2.开环极点对根轨迹的影响
3.系统系能指标的估算
例1:某系统的闭环传递函数为
0.59 1s 1 ( s ) (0.67 s 1)(0.01s 2 0.08s 1)
试近似计算系统的动态性能指标 %, ts .
5.4 基于MATLAB的根轨迹分析
1.阶跃响应与开环增益的关系 2.开环极点对根轨迹的影响
偶极子:一对靠得很近的闭环零极点
0.1
5.3 控制系统根轨迹分析
2.闭环零极点的分布与阶跃响应的定性分析
(1) 稳定性:闭环极点位于S左半平面 (2) 平稳性:最佳阻尼比 (3) 快速性:闭环极点远离虚轴 (4) 动态过程尽快消失:闭环极点之间间距大 零点与极点间间距小
5.3 控制系统根轨迹分析
例2:已知某系统开环传递函数为
K G(s) H (s) s( s 1)
增加一个开环极点:P=-2.
5.4 基于MATLAB的根轨迹分析
3.开环零点对根轨迹的影响
例2:已知某系统开环传递函数为
K G(s) H (s) s( s 1)
增加一个开环极点:Z=-2.
本章小结
定性分析 开环传 法则 闭环 简化 一、 T 递函数 二阶 根轨 , n 零极点 系统 迹 系统 性能 指标
5.3 控制系统根轨迹分析
控制系统根轨迹分析法课件

根轨迹的概念与分类
根轨迹定义
根轨迹是控制系统中的一种图示方法,用来表示系统的极点 与零点随系统参数变化的关系。根轨迹可以用来分析系统的 稳定性、响应速度和阻尼特性等。
根轨迹分类
根据根轨迹的性质和应用,可以将其分为常规根轨迹和广义 根轨迹。常规根轨迹通常用于分析线性时不变系统的稳定性 ,而广义根轨迹则可以用来分析更复杂的非线性、时变和离 散系统。
优化目标
通过优化控制系统的参数,使得 系统的根轨迹具有更好的分布, 从而提高系统的稳定性和性能。
优化方法
采用遗传算法、粒子群算法等优化 算法对控制系统的参数进行优化。
应用
用于优化控制系统的设计,提高控 制系统的性能和鲁棒性。
05
CHAPTER
控制系统根轨迹分析法的软 件实现
使用MATLAB进行控制系统根轨迹分析
系统的稳定性
稳定性定义
如果一个系统受到外部干扰后能够自我调节并恢复到原始状态,那么这个系统 被认为是稳定的。在控制系统中,稳定性是保证系统正常运行的重要条件。
稳定性判别方法
判断控制系统稳定性的方法有多种,包括劳斯判据、赫尔维茨判据、奈奎斯特 判据等。这些方法可以用来判断系统的稳定性,并指导设计者进行系统参数的 调整。
MATLAB软件介绍
MATLAB是一种科学计算软件,广泛应用于控制系统的设计和分析。
MATLAB在控制系统根轨迹分析中的应用
使用MATLAB的Control System Toolbox可以进行控制系统的根轨迹分析,通过调用相 关函数,可以方便地绘制根轨迹图并进行系统性能的分析。
MATLAB根轨迹分析实例
使用Simulink的Control Design Toolbox可以进行控制系统的根轨迹分析,通过搭建系统模型并设置相应的参数, 可以方便地进行根轨迹分析和系统优化。
控制系统的根轨迹分析(matlab)只是课件
在零极点图或根轨迹图上绘制等阻尼线和 等自然振荡角频率线。用户指定阻尼系数 值和自然振荡角频率值
13.1.3 MATLAB根轨迹分析实 例
例1:若单位反馈控制系统的开环传
递函数为
Gk
(s)
s(s
kg 1)(s
5)
绘制系统的根轨迹。
程序如下:
clf;
num=1;
den=conv([1 1 0],[1 5]);
振荡已经很大。
Amplitude Amplitude
Step Response 1.8
1.6 System: G0
Peak amplitude: 1.64
1.4
Overshoot (%): 64.4
At time (sec): 1.44
1.2
1
0.8
0.6
0.4
0.2
0
0
5
10
15
20
Time (sec)
95.5190 POLES =
-7.4965 -0.0107 + 3.6353i -0.0107 - 3.6353i -0.4821
[K,POLES]= rlocfind(G,P)
sgrid
sgrid(z,wn)
交互式地选取根轨迹增益。产生一个十字 光标,用此光标在根轨迹上单击一个极点 ,同时给出该增益所有对应极点值
返回P所对应根轨迹增益K,及K所对应的 全部极点值
在零极点图或根轨迹图上绘制等阻尼线和 等自然振荡角频率线。阻尼线间隔为0.1 ,范围从0到1,自然振荡角频率间隔 1rad/s,范围从0到10
绘制指定系统的根轨迹
绘制指定系统的根轨迹。多个系统绘于 同一图上
绘制指定系统的根轨迹。K为给定增益 向量
13.1.3 MATLAB根轨迹分析实 例
例1:若单位反馈控制系统的开环传
递函数为
Gk
(s)
s(s
kg 1)(s
5)
绘制系统的根轨迹。
程序如下:
clf;
num=1;
den=conv([1 1 0],[1 5]);
振荡已经很大。
Amplitude Amplitude
Step Response 1.8
1.6 System: G0
Peak amplitude: 1.64
1.4
Overshoot (%): 64.4
At time (sec): 1.44
1.2
1
0.8
0.6
0.4
0.2
0
0
5
10
15
20
Time (sec)
95.5190 POLES =
-7.4965 -0.0107 + 3.6353i -0.0107 - 3.6353i -0.4821
[K,POLES]= rlocfind(G,P)
sgrid
sgrid(z,wn)
交互式地选取根轨迹增益。产生一个十字 光标,用此光标在根轨迹上单击一个极点 ,同时给出该增益所有对应极点值
返回P所对应根轨迹增益K,及K所对应的 全部极点值
在零极点图或根轨迹图上绘制等阻尼线和 等自然振荡角频率线。阻尼线间隔为0.1 ,范围从0到1,自然振荡角频率间隔 1rad/s,范围从0到10
绘制指定系统的根轨迹
绘制指定系统的根轨迹。多个系统绘于 同一图上
绘制指定系统的根轨迹。K为给定增益 向量
控制系统的根轨迹法分析
可得
s2 20s 50 0
解得
s1,2 10 5 2
因此,分离点为-2.93,会合点为-17.07。
分离角和会合角分别 为 , 90 根轨迹为圆,如下图所示。
(2)当 2 时,阻尼角
2Hale Waihona Puke 45,表示 45角的直线为OB,其方程为
,
代入特征方程整理后得
(5 k) 10k j(2 2 5 k ) 0
解:(1)起点:有三个开环极点,所以起点为
p1 0, p2 2 j2 3, p3 2 j2 3
(2)终点:因没有有限零点,所以三条根轨迹都将趋于无穷远。
(3)实轴上的根轨迹:根轨迹存在的区间为(-∞,0]。
(4
(5
①渐近线的倾角:根据渐近线计算公式得
φα
180 (1 2μ) 2
60 ,60 ,180
例:单位反馈控制系统的开环传递函数为
K
G (s)
K
s(s 4)(s 6)
若要求闭环系统单位阶跃响应的最大超调量
σ%≤18%,试确定系统的开环增益。
解:绘出 K由零变化到∞时系统的根轨迹如图所示。当K=17时,根轨迹在实轴
上有分离点。当K≥240时,闭环极点是不稳定的。根据σ%≤18 %的要求,求得阻尼 角应为β≤60°,在根轨迹图上作β=60 °的射线,并以此直线和根轨迹的交点A , B作为满足性能指标要求的闭环系统主导极点,即闭环系统主导极点为
闭环系统的极点为
s 2 1
1, 2
n
n
图中阻尼角β与阻尼比ζ的关 系为
cos1
根据根轨迹我们可以确定系统工作在根轨迹上任一点时所对应的ζ,ωn 值,再根据暂态指标的计算公式
% 12 100%