数字处理第三章
精品课件-数字信号处理—理论与实践-第3章
N 1
RN (n) u(n) u(n N ) n k k 0
(3.2-7)
第 3 章 离散时间信号与系统
图3-4 矩形序列
第 3 章 离散时间信号与系统
4. 实指数序列
实指数序列定义为
x(n)=anu(n)
第 3 章 离散时间信号与系统
x={x(n)}, -∞<n<+∞ (3.1-2)
常常直接用x(n)表示离散时间信号——序列。 离散时 间信号也可以用图形来描述, 如图3-1所示。 图中纵向线段的 长短表示各序列值的大小, 横轴代表离散时间点。 注意, 横 轴虽然为连续直线, 但x(n)仅在n取整数的时间点上才有定义; 而n取非整数时, x(n)没有定义。
第 3 章 离散时间信号与系统
第3章 离散时间信号与系统
3.1 3.2 常用的典型序列 3.3 3.4 线性时不变离散系统 3.5 线性常系数差分方程 3.6 序列的傅里叶变换 3.7 MATLAB实现 习题
第 3 章 离散时间信号与系统
3.1
离散时间信号可由对模拟信号x(t)的采样获得。 对模拟信
(3.2-5)
பைடு நூலகம்
式(3.2-3)表明, 单位脉冲序列是单位阶跃序列的一阶后向差 分; 式(3.2-5)表明, 单位阶跃序列是对单位脉冲序列的累 加。
3. 矩形序列RN(n) 矩形序列定义为
第 3 章 离散时间信号与系统
1 0 n N 1 RN (n) 0 其他
(3.2-6)
式(3.2-6)中, N称为矩形序列RN(n)的长度。 RN(n)的波形如图 3.4所示, 它与连续时间信号中的矩形脉冲类似。
数字信号处理第三章3

1
一、预备知识
1、求模(余数)运算 如果整数 n = n1 + mN, 0 ≤ n1 ≤ N −1, m为整数 则称n1是n对N的模,或n模N等于n1。 (余数,只是要求在0~N-1内),记作:
X (k )
即:有限长序列的圆周移位只引入一个相移
2π mk N , 对信号的幅度没有影响。
证明:利用周期序列的移位性质,然后取主值序列即可。
21
4、圆周移位的调制特性
nl IDFT[ X ((k + l )) N RN (k )] = WN x(n) = e −j 2π nl N x ( n)
或:
(2)作复数DFT变换,求出
W ( k ) = DFT [ w ( n )] ( N 点复数 )
(3)求实部和虚部的DFT (见下一页)
43
X 1 (k ) = DFT{Re[w(n)]} = Wep (k ) = 1 [W (k ) + W * (( N − k )) N ] RN (n) ( N点复数) 2 X 2 (k ) = DFT{Im[w(n)]} = 1j Wop (k ) =
1 ∑ x ( n) x * ( n) = N n =0
N −1
∑ X (k ) X * (k )
N −1 k =0
即:
1 2 = ∑ | x(n) | N n=0
∑ | X ( k ) |2
一个序列在时域计算的能量与在 频域计算的能量是相等的。
45
五、圆周卷积和 1、圆周卷积和定理 设 x1(n) 和 x2 (n) 均为长度为N的有限长序列, 且 D [x1(n)] = X1(k) DFT[x2 (n)] = X, ) FT 2 (k
数字信号处理 第三章 图像信号分析基础讲解
对于连续图像,定义阈值面积函数A(F)为具有灰 度级F的所有轮廓线所包围的面积。对于数字图 像,任一灰度级F的面积函数A(F)即大于或等于 灰度值F的像素点的个数。
曝光过强(过弱)会导致大片白色(黑色),丢失 明暗、对比度、纹理等细节信息,即使采用插值 算法,也难以准确恢复。此时将在直方图的一端 或两端产生尖峰。
3.1.5 灰度直方图
直方图是一幅图像中各像素灰度值出现次数(或 频数)的统计结果,它只反映该图像中不同灰度 值出现的次数(或频数),而未反映某一灰度值 像素所在位置。也就是说,它只包含了该图像中 某一灰度值的像素出现的概率,而丢失了其所在
的卷积。 水印、验证码
三、减法运算
将多幅图像的对应点相减得到新图像。 可去除图像中不需要的加性图案。 可用于运动检测。 可以用来计算物体边界位置的梯度。 新图像的灰度直方图为两个原始图像灰度
直方图的卷积。
四、乘除法运算
乘法运算可以用来去除原始图像中的一部 分:首先构造一副掩膜图像,在需要保留 区域,图像灰度值为1,而在被去除区域, 图像灰度值为0;然后将掩膜图像乘原始 图像。
显然, 若a 1,b 0,图象像素不发生变化; 若a 1,b 0,图象所有灰度值上移或下移; 若a 1,输出图象对比度增强; 若0 a 1,输出图象对比度减小; 若a 0,暗区域变亮,亮区域变暗,图象求补。
三、非线性点运算
s
s
s
O
r
O
r
O
r
s
s
s
O
r
O
数字信号处理 第三章
:相位函数(phase function)或相位谱(phase spectrum)
3/29
与连续时间傅立叶变换的关系
X (W) = xa ( t ) =
ò
+¥ -¥
x (t )e - jWt dt
k =-¥
å x(k )d (t - k )
X ( W) =
+¥
ò
+¥ -¥
X * (e j )
1 X cs (e j ) { X (e j ) X * (e j )} 2 1 X ca (e j ) { X (e j ) X * (e j )} 2
xcs [n] xca [n]
X re (e j ) jX im (e j )
16/29
K
lim
X e X e d 0
j K j 2
例:理想低通滤波器 1 0 c H LP e 0 c j c n j c n 1 c jn 1 e e sin c n hLP n e d 2 c 2 jn n jn
10/29
3.1.2 收敛条件(convergence)
如果x[n]的DTFT在种意义上收敛,则称x[n]的傅立叶变换存在
1、一致收敛(uniform convergence) 令X K e j
xne ,一致收敛的定义为 lim X e X e 0
Table 3.4 实序列的离散时间傅立叶变换的对称关系 序列 离散时间傅立叶变换
x[n]
xev [n]
X (e j ) X re (e j ) jX im (e j )
【精选】数字图像处理第3章
设定加权因子 ai 和 bi 的值,可以得到不同的变换。例如,当选定
a2 b1 切。
1 ,b2
0.1
,a1
a0
b0
0
,该情况是图像剪切的一种列剪
(a)原始图像
Digital Image Processing
(b)仿射变换后图像
3.1 图像的几何变换
◘透视变换 :
把物体的三维图像表示转变为二维表示的过程,称为透视 变换,也称为投影映射,其表达式为:
a2
b2
a1 b1
a0
b0
y
1
平移、比例缩放和旋转变换都是一种称为仿射变换的特殊情况。
仿射变换具有如下性质:
(1)仿射变换有6个自由度(对应变换中的6个系数),因此,仿射变换后 互相平行直线仍然为平行直线,三角形映射后仍是三角形。但却不能
保 证将四边形以上的多边形映射为等边数的多边形。
1D-DFT的矩阵表示 :
F (0)
F (1)
WN00 WN10
F (2)
WN20
F (N 1)
W
(N N
1)0
WN01 WN11 WN21
WN(N 1)1
W
0( N
N
1)
WN1(N 1)
第3章 图像变换
◆ 3.1 图像的几何变换 ◆ 3.2 图像的离散傅立叶变换 ◆ 3.3 图像变换的一般表示形式 ◆ 3.4 图像的离散余弦变换 ◆ 3.5 图像的离散沃尔什-哈达玛变换 ◆ 3.6 K-L变换 ◆ 3.7 本章小结
数字图像处理第三章二值图像
图 3.13a 4邻点 中轴变换举例 中轴可作为物体的一种简洁表示.
图3.13b表明少量噪声会使中轴变换结果产 生显著的差异.
图 3.13b 中轴变换举例
3.5.7 细化
细化是把区域缩成线条、逼近中心线(骨架或核线)的一种图 像处理。细化的目的是减少图像成份,直到只留下区域的最基 本信息,以便进一步分析和识别.虽然细化可以用在包含任何 区域形状的二值图像,但它主要对细长形(而不是凸圆形或水滴 状)区域有效.细化一般用于文本分析预处理阶段,以便将文本 图像中线条图画或字符笔画表示成单像素线条.
d=i-j+m-1
二值图像及其对 角线上的投影图
3.4游程长度编码 (run-length encoding)
用图像像素值连续为1的个数来描述图像,有两种方法: (1)用1的起始位置和1的游程长度; (2)仅仅使用游程长度,0:表示从0象素开始 ; 例:
1的游程:(2,2)(6,3)(13,6)(20,1) (4,6)(11,10) (1,5 )(11,1)(17,4)
洞
`S
(7) 边界
S的边界是S中与`S中有4连通关系的像素集合S '
(8) 内部
S中不属于它的边界的像素集合. S的内部等于S - S '
(9) 包围
如果从S中任意一点到图像边界的4路径必须与区域T相 交,则区域 T 包围区域 S(或S在T内)
S `S
边界
内部 包围
例:一幅二值图像
图像 边界
3.5.2 连通成分标记算法
(2) 路径
列:
[路i0径,j0 :]从[像,i1,素j1][i0 ,, j,0[]in 到,j像n]素,[[iikn
,
,
数字信号处理第三章补

在此频谱图中就分辨不出来。
v(n) 6
4
T=1 / fs
2
0
0 0
2 2T
4 4T
6 6T
8 8T t p =1 / F
10 10 T
12 12 T
14 14 T
16 16 T
18
n t
(a) |V(k )| 40 30 20 10 0 0 0 2 2F 4 4F 6 6F F=1 / tp
8 8F fs =1 / T
m 0
M 1
用DFT算法也就是用圆周卷积来代替这一线性卷积时,为了
不产生混叠,其必要条件是使x(n),h(n)都补零值点,补到至少
N=M+L-1, 即:
x(n) x(n) 0
0≤n≤L-1 L≤n≤N-1
h(n) 0≤n≤M-1 h(n ) 0 M≤n≤N-1
然后计算圆周卷积
y (n) x(n)
N
h( n )
这时,y(n)就能代表线性卷积的结果。 用FFT计算y(n)的步骤如下:
① 求N点X(k)=DFT[x(n)], N点;
② 求H(k)=DFT[h(n)], N点;
③ 计算Y(k)=X(k)H(k);
④ 求y(n)=IDFT[Y(k)],N点。
率(单位: Hz)。
由图可知:
t p NT fs 1 1 F N NT t p
在实际应用中, 要根据信号最高频率fh和频谱分辨率F的要求, 来确定T、tp和N的大小。 (1)首先,由采样定理,为保证采样信号不失真,fs≥2fh(fh为 信号频率的最高频率分量,也就是前置低通滤波器阻带的截止 频率), 即应使采样周期T满足
n
数字信号处理第三章chhy
( K,m,N均为整数 WNk WNk mN ) , k , m, N
X ( k mN (2) X(k)隐含的周期性 (周期为N) )
n 0
N 1
( x ( n )WN k mN ) n
X ( k mN ) x ( n )W
kn x(n )W X ( k ) DFT [ x ( n )] x ( n )WN
X ( k ) DFT [ x ( n )]
M-1 N 1
N 1
kn N
0 k N-1
X (k ) X ( z )
2 j k z e N
, ,
0 X( k ) ((kX X ((zzj)) )22 ,, k N-1 X k)(3.1.3) j X ) ( z j X e
3.1 离散傅立叶变换的定义及物理意义 3.1.2 DFT与傅里叶变换和Z变换的关系
设序列x(n)的长度为M, 其Z变换和N点DFT分别为:
X ( z ) ZT [[x (( n )] xxnnz n n X ( z ) ZT x n )] ( () )z
N 1 n 0
X (k )e
k 0
N 1 ~
j
2 nk N
一个域的离散造成另一个域的周期 延拓,因此离散傅里叶变换的时 域和频域都是离散的和周期的
引入
例1:连续时间、连续频率—傅里叶变换
例2:连续时间、离散频率—傅里叶级数
引入
例3:离散时间、连续频率—序列的傅里叶变换
例4: 离散时间、离散频率—序列的傅里叶级数
j
2π N
,将时域序列x(n)变换为频域序列X(k);
数字信号处理第三章习题作业答案
1 e 当 k 2, 4, 6,... 时,X 1 (k ) 0
序列3:
x3 (n) x1 (n) x1 (n 4)
根据序列移位性质可知
X 3 (k ) X1 ( k ) e j k X1 ( k ) (1 e j k )
即 x(n) 是以 n 0 对称轴的奇对称
故这三个序列都不满足这个条件
(3)由于是8点周期序列,其DFS:
nk X (k ) x(n )WN x (n )e n 0 n 0 N 1 7 j 2 nk 8
序列1:
X 1 (k ) e
n 0
3
y 解: 序列 x(n) 的点数为 N1 6 , (n) 的点数为 N 2 15, 故 x(n) y (n) 的点数应为
N N1 N 2 1 20
是线性卷积以15为周期周期延拓后取主值序列 19( N 1) 0
15 ( L)
又 f (n) 为 x(n) 与 y (n) 的15点的圆周卷积,即L=15。
第三章习题讲解
n 1, 0 n 4 h(n) R4 (n 2) 3.设 x(n) 其他n 0, h 令 x(n) x((n))6 , ( n) h((n)) 6 ,
试求 x(n) 与 h (n) 的周期卷积并作图。
解:
y ( n ) x ( m )h ( n m )
4 ( L N 1)
15 ( L)
34 ( L N 1)
混叠点数为N-L=20-15=5 n 0 ~ n 4( N L 1) 故 f (n)中只有 n 5到 n 14的点对应于 x(n) y (n)
第三章--Z变换(数字信号处理)
综合以上二步可得 x(n) anu(n)
例 3.7已知 换x(n)。
第三章 序列的Z变换
X (z)
1 a2 (1 az)(1 az1) ,
a
1,
求其反变
解: 该例题没有给定收敛域, 为求出唯一旳原序 列x(n), 必须先拟定收敛域。 分析X(z), 得到其极点 分布如图3.5所示。 图中有二个极点z=a和z=a-1, 这么 收敛域有三种选法, 它们是
n n1
设x(n)为有界序列, 因为是有限项求和, 除0与∞
两点是否收敛与n1、 n2取值情况有关外, 整个z平面均 收敛。 假如n1<0, 则收敛域不涉及∞点; 如n2>0, 则 收敛域不涉及z=0点; 假如是因果序列, 收敛域涉及
z=∞点。 详细有限长序列旳收敛域表达如下:
第三章 序列的Z变换
第三章 序列的Z变换
n 0, x(n) Re s[F (z), a] Re s[F (z), a1]
a(
(1 a2 z a)(
)zn z
a
1
)
(
z
a
)
za
(1 a2 )zn a(z a)(z a1) (z
a1)
z a 1
an (an ) an an
最终将x(n)表达成
nn1
nn1
n0
第一项为有限长序列, 设n1≤-1, 其收敛域为0≤|z|< ∞。 第二项为因果序列, 其收敛域为Rx-<|z|≤∞, Rx是第二项最小旳收敛半径。 将两收敛域相与, 其收 敛域为Rx- <|z|<∞。 假如x(n)是因果序列, 收敛域定为Rx- <|z|≤∞。 推论:如序列x(n)旳Z变换旳收敛域包括∞点,则x(n) 是因果序列
数字信号处理答案第三章
= = =
0 0 1 j 2πn e 10 , n = 1, 2, . . . , k. 2
3.3
(a) X1 (z ) = = = = The ROC is (b)
1 3 ∞ 0
1 1 ( )n z −n − 1 ( )n z −n + 3 2 n=−∞ n=0 1
1 −1 1− 3 z
+ +
1 ( )n z n − 1 2 n=0 1 − 1, 1− 1 2z −1 2 z)
∞
1
1−1 −1 3zFra bibliotek(1 −
5 6 1 −1 )(1 3z
< |z | < 2. X2 (z ) = = = 1 ( )n z −n − 2n z −n 3 n=0 n=0 1 1−
1 −1 3z ∞ ∞
nan cosw0 nz −n nan ejw0 n + e−jw0 n −n z 2 60
© 2007 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. For the exclusive use of adopters of the book Digital Signal Processing, Fourth Edition, by John G. Proakis and Dimitris G. Manolakis. ISBN 0-13-187374-1.
数字信号处理第三章习题解答

(4)在频带宽度不变的情况下,将频率分辨率提高一倍的N值。
解:
(1)已知
(2)
(3)
(4)频带宽度不变就意味着采样间隔T不变,应该使记录时间扩大一倍为0.04s实现频率分辨率提高一倍(F变为原来的1/2)
18.我们希望利用 长度为N=50的FIR滤波器对一段很长的数据序列进行滤波处理,要求采用重叠保留法通过DFT来实现。所谓重叠保留法,就是对输入序列进行分段(本题设每段长度为M=100个采样点),但相邻两段必须重叠V个点,然后计算各段与 的L点(本题取L=128)循环卷积,得到输出序列 ,m表示第m段计算输出。最后,从 中取出B个,使每段取出的B个采样点连接得到滤波输出 。
————第三章————
离散傅里叶变换DFT
3.1 学习要点
3.1.1DFT的定义、DFT与Z变换(ZT)、傅里叶变换(FT)的关系及DFT的物理意义
1.DFT的定义
设序列 为有限长序列,长度为 ,则定义 的 点离散傅立叶变换为
(3.1)
的 点离散傅立叶逆变换为
(3.2)
其中, , 成为DFT变换区间长度。
学习DFT的性质时,应与傅里叶变换的性质对照学习,要搞清两者的主要区别。我们知道,傅里叶变换将整个时域作为变换区间,所以在其性质中,对称性以原点为对称点,序列的移动范围无任何限制。
然而,DFT是对有限长序列定义的一种变换,也就是说,DFT变换区间为 。这一点与傅立叶变换截然不同,由于 及 区间在DFT变换区间以外,所以讨论对称性时,不能再以原点作为对称点,而是以 点作为对称点。为了区别于无限长共轭对称序列,用 和 分别表示有限长(或圆周)共轭对称序列和共轭反对称序列。其定义为
即 隐含周期性,周期为 。
数字信号处理第三版第三章
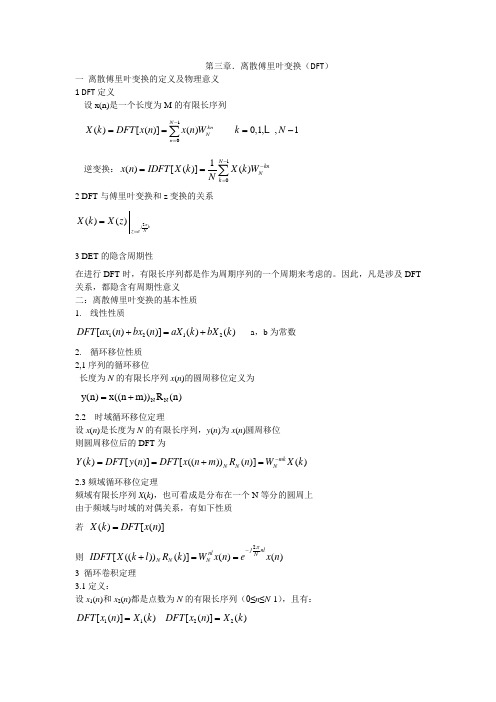
第三章.离散傅里叶变换(DFT )一 离散傅里叶变换的定义及物理意义1 DFT 定义设x(n)是一个长度为M 的有限长序列10()[()]()0,1,,1N kn N n X k D FT x n x n Wk N -====-∑ 逆变换:101()[()]()N kn N k x n ID FT X k X k W N --===∑2 DFT 与傅里叶变换和z 变换的关系2()()j kN z e X k X z π== 3 DET 的隐含周期性在进行DFT 时,有限长序列都是作为周期序列的一个周期来考虑的。
因此,凡是涉及DFT 关系,都隐含有周期性意义二:离散傅里叶变换的基本性质1. 线性性质1212[()()]()()D FT ax n bx n aX k bX k +=+ a ,b 为常数2. 循环移位性质2,1序列的循环移位长度为N 的有限长序列x (n )的圆周移位定义为N N y(n )x ((n m ))R (n )=+2.2 时域循环移位定理设x (n )是长度为N 的有限长序列,y (n )为x (n )圆周移位则圆周移位后的DFT 为()[()][(())()]()m k N N N Y k D FT y n D FT x n m R n W X k -==+=2.3频域循环移位定理频域有限长序列X (k ),也可看成是分布在一个N 等分的圆周上由于频域与时域的对偶关系,有如下性质若 ()[()]X k DFT x n =则 2[(())()]()()j nl nl N N N N IDFT X k l R k W x n ex n π-+==3 循环卷积定理3.1定义:设x 1(n )和x 2(n )都是点数为N 的有限长序列(0≤n ≤N -1),且有:1122[()]()[()]()DFT x n X k DFT x n X k ==若12()()()Y k X k X k =则11201210()[()]()(())()()(())()N N N m N N N m y n ID FT Y k x m x n m R n xm x n m R n -=-===-=-∑∑上式所表示的运算称为x 1(n )和x 2(n )的N 点圆周卷积3.2 循环卷积定理若12()()()y n x n x n = x 1(n ),x 2(n )皆为N 点有限长序列则 1120121012()[()]1()(())()1()(())()1()()N N N l N N N l Y k D FT y n X l X k l R k NX l X k l R k NX k X k N -=-===-=-=∑∑ 3.3 复共轭序列的DFT设x *(n )为x (n )的共轭复序列,已知X (k )= DFT[x (n )]则DFT [x *(n )]=X *(N-k ) 0≤k ≤N -1且 X (N )=X (0)3.4 共轭对称性三 频域采样1频域采样定理如果序列x (n )长度为M ,则只有当频域采样点数N>M 时,才有()()()()()()N N N N r x n x n R n x n rN R n x n ∞=-∞==+=∑即由频域采样X (k )恢复原序列x (n ),否则产生时域混叠现象。
数字信号处理_第三章

x( L 1) x( L 2) y (0)c x(0) y (1) x(1) x(0) x( L 1) c y (2)c = x(2) x(1) x(0) x( L 1) x( L 2) x( L 3) y ( L 1)c
DFTx2 (n) X 2 (k )
二、循环移位性质
1、序列的循环移位(圆周移位)定义: 一个有限长序列 x(n) 的圆周移位定义为
y(n) xn mN RN n
(1) 先将x(n)作 周 期 ~ x延 (n) 拓 xnN
~ n mN (2) 延 拓 后 再 进 x (n 行 m移 ) x位
1 e
e
k j 38
sin(k / 2) sin(k / 8)
15 j
0k 7
2kn 16
(2)N 16 时 X (k ) x(n) W
n 0 N 1 nk N
R4 (n)e
n 0
e
n 0
3
kn j2 16
1 e
4k j2 16 k j2 16
~ 周期序列 x (n) 是有限长序列x(n)的周期延拓。
x (n) 0 n N 1 ~ x(n) 其它 0
或
x(n) ~ x (n) RN (n)
x (n) 的主值序列。 有限长序列x(n)是周期序列 ~
二、DFT的隐含周期性
如:
0
x(n)
n N-1
数字信号处理第三章离散傅里叶变换(DFT)及其快速算法(FFT)
周期
2
s、fs N
分辨率
2
N
fs N
返回
回到本节
DFT和DFS之间的关系:
周期延拓
取主值
有限长序列
周期序列
主值区序列
有限长序列 x(n) n 0,1, 2, M 1
周期序列 xN (n) x(n mN ) x((n))N m 0 n0 N 1 n mN n0 ((n))N n0
四种傅立叶变换
离散傅立叶变换(DFT)实现了信号首次在频域 表示的离散化,使得频域也能够用计算机进行处理。 并且这种DFT变换可以有多种实用的快速算法。使信 号处理在时、频域的处理和转换均可离散化和快速 化。因而具有重要的理论意义和应用价值,是本课程 学习的一大重点。
本节主要介绍
3.1.1 DFT定义 3.1.2 DFT与ZT、FT、DFS的关系 3.1.3 DFT的矩阵表示
• X(k)为x(n)的傅立叶变换 X (e j ) 在区间 [0, 2 ]上的N
点等间隔采样。这就是DFT的物理意义。
j ImZ
2பைடு நூலகம்3
4
5 6
1 2
N
k=0 ReZ
7 (N-1)
DFT与z变换
X(ejω)
X(k)
0
o
2
0
N 1 k
DFT与DTFT变换
回到本节
变量
、f k
之间的某种变换关系.
• 所以“时间”或“频率”取连续还是离 散值,就形成各种不同形式的傅里叶变换 对。
3.1 离散傅里叶变换的定义及物理意义
时间域
t:连续
模拟域
(数字图像处理)第三章图像的基本运算
点运算的应用场景
点运算在图像处理中具有广泛的应用,例如在医学影像处理中,可以通过点运算来 调整图像的对比度和亮度,提高医学影像的清晰度和可读性。
在遥感图像处理中,点运算可以用于校正和增强遥感图像,提高遥感数据的准确性 和可靠性。
图像基本运算的重要性
01
图像基本运算是图像处理的基础 ,是实现复杂图像处理算法的基 石。
02
掌握基本运算有助于深入理解图 像处理原理,提高图像处理技能 。
02
图像的点运算
线性点运算
线性点运算是指通过线性变换对图像的像素值进行 操作,常见的线性点运算包括加法、减法、乘法和 除法等。
线性点运算可以用于增强图像的对比度、调整图像 的亮度、改变图像的色彩等。
总结词
旋转操作用于将图像围绕一个点旋转一定角度,同时改变像 素的位置。
详细描述
旋转操作用于将图像中的像素按照指定的角度进行旋转,同 时像素值保持不变。这种操作常用于纠正倾斜的图像、实现 特定视角的观察等。
图像的剪切
总结词
剪切操作用于从图像中删除一部分区域,只保留所需部分。
详细描述
剪切操作用于从图像中删除指定的区域,只保留所需的像素部分。这种操作常 用于裁剪照片、去除背景等。剪切操作可以快速有效地去除不需要的区域,突 出显示所需的细节或主题。
图像的缩放
总结词
缩放操作用于改变图像的大小,可以通过放大或缩小像素值来实 现。
详细描述
缩放操作用于改变图像的尺寸,可以通过放大或缩小像素值来实 现。放大图像时,像素值会被插值计算以填充新的像素空间;缩 小图像时,像素值可能会被平均或选择性地丢弃。这种操作常用 于调整图像大小、视窗变换等。
数字信号处理第三章习题答案
解 (1) 已知F=50Hz (2) (3)
(4)频带宽度不变就意味着采样间隔T不变, 应该使记录时间 扩大一倍为0.04s实现频率分辨率提高1倍(F变为原来的1/2).
解
、
和
(a)、(b)、(c)所示。
分别如题3解图
x1(n) (a)
x2(n) (b)
y (n)
(a)
(b)
(c) (c)
5.如果X(k)=DFT[ x(n)], 证明DFT的初值定 理 证明 由IDFT定义式
可知
14.两个有限长序列x(n)和y(n)的零值区间为 x(n)=0, n<0, 8≤n y(n)=0, n<0, 20 ≤ n
对每个序列作20点DFT, 即
X (k)=DFT [x(n)],
Y(k)=DFT [y(n)],
如果
F(k)=X(k)▪Y(k),
k=0,1,…,19 k=0,1,…,19 k=0,1,…,19
f(n)=IDFT [F(k)], k=0,1,…,19
试问在哪些点上f(n)=x(n)*y(n)?为什么?
解 如前所述, 记
,而
fl(n)长度为27,f(n)长度为20.前面已推出二者的关系为
只有在如上周期延拓序列中无混叠的点上, 才满足f(n)=fl(n)7
21-47
41-67
1-7
21-27
8-20
7-19 当从0开始时候
15.用微处理器对实数序列作谱分析, 要求谱分辨率F≤50Hz, 信号最高频率为1kHz, 试确定以下各参数;
教材第三章习题解答
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
改进模型:
①海上“特征反褶积”模 型
x(t) s(t)* w(t)*e(t)
其中:
s(t) —海水表面附近记录下来的震源子波 w(t) —包括地层传播影响和记录系统响应的未知子波 e(t) —反射系数序列
②沙漠地区可控震源地震记录模型
第三章 反褶积
3.1、反褶积及褶积模型
一、反褶积的概念
反褶积又称反滤波。为了消除大地滤 波及接收系统滤波对地震数据的影响而作 出的滤波处理。
反滤波本质上是一种频率滤波。从数 学上看,它是一种褶积运算,故称反褶积。
反褶积处理:
是常用处理方法之一。可以用于叠前 和叠后,也可以多次使用。
作用:
压缩地震子波,提高纵向分辨率。 可 以压制多次波和短周期鸣震等干扰,提高 地震资料信噪比。
反褶积的关键 是如何设计一个反滤波器去抵消另一
个滤波器的作用。
设计反滤波器的方法:统确计定性性方方法法
由已知地震子波计算反褶积算子, 称确定性反褶积,主要用于去除记录 系统的响应、海上震源子波反褶积等 方面;
通过统计方法求取最佳反褶积算子, 如脉冲反褶积、预测反褶积等。
二、褶积模型
理想模型:
x(t) b(t)* (t)
Power Spectrum from line 127 with no decon.
Power spectrum of line 127 after minimum phase predictive deconvolution with a 24 ms gap
Power Spectrum from line 127 with no decon.
3.2 反滤波 一、反滤波的概念 1、概念
2、反子波
假定地震记录不含干扰,即
x(t) b(t)* (t) (3-1)
对应的频域形式
X () B() ()
令 A() 1 B()
则可得到
() A()X ()
(3- 6) (3 - 7)
(3 - 8)
写成时域形式为:
(t) a(t)* x(t)
(3-1)
加噪模型: x(t) b(t)* (t) n(t) (3-2)
其中:
x(t) 地震记录 b(t) 地震子波
(t) 反射系数序列
n(t) 噪声
反褶积的假设条件:
(1)地下地层是水平层状介质; (2)地震波是垂直入射反射的平面波; (3)地震子波在传播过程中保持波形不变; (4)地震记录中无噪声; (5)地震子波已知; (6)反射系数序列为白噪序列; (7)地震子波是最小相位的。
Line 127 Before Phase Correction Deconvolution
Line 127 After Phase Correction Deconvolution
Power spectrum of line 127 before phase correction deconvolution
反褶积就是要获得未经系统作用的地震波形。
地震子波 b(t同) 震源子波 o,(t)其概念是有区别的,
它与许多因素有关。根据地震波传播过程中影响因素 的不同,地震子波可描述为:
b(t) o(t) * g(t) * (t) * d (t) *i(t)
o(t) * fg(t) * fd (t)
(3 - 4)
震源爆炸使地下介质形成三个区域:
震源爆炸产生尖脉 冲传播到弹性区起始 边界时,已经变成了 有一定延续时间的稳 定波形——地震子波。
地层对震源脉冲的改造作用,相当于对 它进行了一次低通滤波,此滤波器常称为 大地滤波器。
假设震源脉冲在地下介质中传播未受大 地改造,脉冲信号入射到分界面、反射信号 返回地面,被检波器接收、传输到仪器被记 录下来。如果接收系统未对震源脉冲进行改 造,则地of line 127 before spectral balancing
Power spectrum of line 127 after spectral balancing with 6 frequency panels
Line 127 with Phase Correction and Spectral Balance
Power spectrum of line 127 after phase correction deconvolution. Note little change in frequency content
Spectral Balance—谱均衡(谱白化)
Set the Spectral Balance Parameters: • Number of Frequency Panels is 6 • Scaling Time Window (250) • Set the corner points (拐点)as follows:
• Set Deconvolution Type to Minimum Phase Predictive • Use an Operator Length (ms) of 250 • Set the Prediction Distance (ms) to 96 • Let White Noise (percent) be .1, the default • Use one time gate with a Start Time (ms) of 700 and an Interval(ms) of 400.
Deconvolution
Deconvolution, 10% Noise
Phase Correction (No Whitening-不白噪化)
• The Deconvolution Type is Phase Correction Only • Set Operator Length (ms) to 250 • Use .1% White Noise • Use one time gate with Start Time (ms) of 700 and Interval (ms)of 400
• All other parameters remain the same.
Line 127 Zero Phase Spiking Deconvolution.
Line 127 Minimum Phase Spiking Deconvolution.
Line 127 Power Spectrum Before Spiking Line 127 Power Spectrum After Spiking
③反褶积方法可能会提高噪声水平,有必 要同时发展提高分辨率及信噪比的方法。
反褶积方法很多,有些(如最大熵、卡尔曼、 时变Q等)未能在常规处理中获得一席之位。
反 射 系 数 剖 面 地 震 剖 面
(a)由声波测井算出的层速度 (b)由测井数据算出的反射系数(随深度变化) (c)随时间变化的反射系数
为了把地震子波压缩成尖脉冲(必需去掉大地 滤波器的作用),使地震记录变为反射系数序列, 出现了各种反褶积方法,而实际处理结果 往往不如人愿。其原因有三:
①地震记录已知,地震子波未知,求反射 系数序列,必须有若干假设条件限定解的 唯一性,否者是多解的;假设条件与实际 情况越接近,反褶积效果越好。
②反褶积方法依赖地震记录的褶积模型, 模型中地震子波是大地滤波器的脉冲响应, 而大地滤波的作用复杂,模型不太可靠。 只有先彻底解决正演问题,才能使反褶积 得到发展。
x(t) s(t)* w(t)*e(t)
其中:
s(t) —扫描信号 w(t) —基本子波 e(t) —反射系数序列
③仿真褶积模型(四川)
s(t, x) [ (t)*T1(T, )* M (t, x)].SL(t)*T2 (t, )* RI (t, x)*b(t) N(t)
其中:
s(t, x) 偏移距为x的地震记录;
式中 o(t) — 震源子波; g(t) — 地层响应;
(t) — 透射响应; d (t) — 地面接收响应;
i(t) — 仪器响应;
而 fg (t) (t) * g(t) — 大地滤波器;
fd (t) d (t) * i(t) — 接收滤波器.
•干扰波是由非激发干扰(次生)no(t) 、背景噪声 n1 (t )及规则(或称相干)(由激发产生)干扰 N (t) 叠加而成:
反子波与子波褶积为:
a(t)*b(t) (t)
(3- 9) (3 -10)
由子波和反射系数求地震记录,是一褶 积过程(正演);
最常用的反褶积有脉冲反褶积和预测反褶积; 其中预测反褶积主要是用来消除多次波。它们都 要求地震子波bi为最小相位的。在此条件下,可 以证明,当反子波ai足够长时,其实际输出ai*bi 与期望输出为脉冲di={1,0,0,0…}时,可以无限接 近就,即
ai *bi di i
即把子波压缩成脉冲形式。
x(t) rt1b(t t1) rt2 b(t t2 ) rt3 b(t t3 ) ...
rti b(t ti )
在地面接收到的信号为不同波形的叠加,这样就模 糊了各层的出现时间和反射系数的大小和极性,使 其无法分辨薄层。
Predictive Deconvolution Processing
n(t) n0(t) n1(t) N (t) (3- 5)
规则干扰 N (t分) 两类:
一类与地质构造有关,包括多次波、转换波、绕 射波、伴随波、折射波、瑞利波、勒夫波和斯通利 波等,这类波在特定的条件下可转化为有效波;
另一类与地质构造无关,如水中震鸣、气泡效应、地 表及海面散射等 (也包括地下震鸣、薄层微曲多次 波)。实际处理时,要根据不同的勘探情况,分别对待。
Parameter Options and Time Gate design for Deconvolution