重复性和再现性汇总
检具重复性再现性

%AV = 100 [ AV / TV ]
= 100 [ 0.01775 / 0.15334 ] = ######
%GRR = 100 [ GRR / TV ]
= 100 [ 0.03035 / 0.15334 ] = ######
R705-1
量具重复性和再现性报告
零件号和名称: 通道板总成(5492684) 量具名称:塞尺
特 征: 轮廓 BL 尺寸规范: 面轮廓 1.00
量具编号:LG06-1007 测量范围:0-8 mm
日 期:
2004.12
操作者:
陶志良、龚晨奇、 周嘉华
来自数据表: R = 0.0417
X DIFF = 0.0350
零件变差 ( PV )
PV = Rp ´ K3
´ = 0.47778
0.3146
= 0.15031
总变差 ( TV )
TV =
( GRR 2 PV2 )
= ( 0.03035 2 0.15031 2 )
= 0.15334
零件数
2 3 4 5 6 7 8 9 10
K3
0.7071 0.5231 0.4467 0.4030 0.3742 0.3534 0.3375 0.3249 0.3146
RP= 0.4778
数据分析报告者: 李悦生
测量 系 统 分析
重复性——设备变差 ( EV )
EV = R ´ K1
´ = 0.0417
0.5908
= 0.02462
再现性——评价人变差 ( AV )
试验次数 2 3
K1 0.8862
汽柴油的重复性和再现性公式

汽油质量检验项目的重复性和再现性计算公式1、溶剂洗胶质GB/T8019重复性计算:未洗胶质含量r=0.997X0.4,溶剂洗胶质含量r=1.298X0.3 X—重复测定结果的算术平均值。
再现性计算:未洗胶质含量R=1.928X0.4,溶剂洗胶质含量R=2.494X0.3 X—两个独立结果的算术平均值。
2、荧光硫SH/T0742重复性计算:r= 12 .30 (X + 1 0 )0.1X—重复测定结果的算术平均值。
再现性计算: R =3 6. 26 (X + 10 )0.1X—两个独立结果的算术平均值。
3、紫光硫SH/T0689重复性计算:r=0.1867X0.63X—重复测定结果的算术平均值。
再现性计算:R=0.2217X0.92X—两个独立结果的算术平均值。
4、硫醇硫GB/1792重复性计算:r=0.00007+0.027XX—重复测定结果的算术平均值。
再现性计算:R=0.00031+0.042XX—两个独立结果的算术平均值。
5、馏程GB/T6536 ℃1)手工法回收点重复性r、再现性R的计算:10%回收点:S=0.05(T20%平均回收温度-T初馏点平均回收温度)r=(S+2.46)/2.44R=(S+1.39)/0.7650%回收点:S=0.05(T60%平均回收温度-T40%平均回收温度)r=(S+2.46)/2.44R=(S+1.39)/0.7690%回收点:S=0.1(T90%平均回收温度-T80%平均回收温度)r=(S+2.46)/2.44R=(S+1.39)/0.76终馏点:S=(T终馏点平均回收温度-T95%平均回收温度)/(V终馏点平均体积-95)r=(S+1.82)/2.66R=(S+6.95)/2.242)自动法回收点重复性r、再现性R的计算:10%回收点:S=0.05(T20%平均回收温度-T初馏点平均回收温度)r=1.2+1.42SR=3.0+2.64S50%回收点:S=0.05(T60%平均回收温度-T40%平均回收温度)r=1.2+1.42SR=2.9+3.97S90%回收点:S=0.1(T90%平均回收温度-T80%平均回收温度)r=1.1+1.08SR=2.0+2.53S终馏点:r=3.5R=10.56、烃的重复性和再现性计算(1)不含含氧化合物样品的重复性和再现性%(体积分数)(2)含有含氧化合物样品的重复性和再现性%(体积分数)7、苯、甲苯重复性和再现性计算%(体积分数)8、醇类和醚类中氧含量的重复性和再现性计算%(质量分数)9、汽油中Fe和Mn含量的重复性和再现性计算mg/LFe重复性:0.65X0.48再现性:0.55X0.79Mn重复性:0.42X1/2再现性:1.41X1/2/a/20100427/004567.htm柴油质量检验项目的重复性和再现性计算公式1、闭口闪点GB/T261重复性计算:0.029XX—重复测定结果的算术平均值。
重复性和再现性不确定度
量具重复性与再现性分析:GR&R 是用来检定检测产品的人员是否具备识别产品特性的能力,正常的产品是否会误判,不正常的产品是否会漏判,也就是检定“检测系统是否正常”的一个工具。
GR&R是研究重复性和再现性的,是计量型分析。
1.简称:重复性(EV)(equipment variance)设备偏差、(再现性AV)(appriser variance)人員偏差、产品偏差(PV)(products variance),2.重复性(Repeatability):重复性是用本方法在正常和正确操作情况下,由同一操作人员,在同一实验室内,使用同一仪器,并在短期内,对相同试样所作多个单次测试结果,在95%概率水平两个独立测试结果的最大差值。
在中国仪器中当测量条件是在以下4个状况下实验时,相同的待测量的测量结果有一致性的称为重复性,4个条件如下:a、相同的测量环境b、相同的测量仪器及在相同的条件下使用c、相同的位置d、在短时间内的重复3.再现性(Reproducibility)是指两个不同的实验室对同一物料进行测定两个分析结果接近的程度.再现性的值总是大于或等于重复性,因为再现性的测量结果把重复性引起的偏差考虑进去了。
在很多实际工作中,最重要的再现性指由不同操作者、采用相同的方法、仪器,在相同的环境条件下,检测同一被测物的重复检测结果之间的一致性,即检测条件的改变只限于操作者的改变。
也就是说别人用你说的方法和仪器也能做出同样的结果来,这就是试验的再现性。
当然,这样的试验就叫做再现性实验。
4.测量结果的重复性:是指“在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性”。
上述定义中的“一致性”是定量的,可以用重复性条件下对同一量进行多次测量所得结果的分散性来表示。
而表示测量结果分散性的量,最为常用的是实验标准。
重复性条件。
质言之,就是在尽量相同的条件下,包括程序、人员、仪器、环境等,以及尽量短的时间间隔内完成重复测量任务。
重复性和再现性分析报告
重复性和再现性分析报告引言一、重复性的定义和意义重复性是指在相同或相似条件下,独立重复进行实验并得到的结果之间的一致性。
重复性的高低可以反映实验方法的可靠性和稳定性。
对于一个研究结果来说,如果其重复性很好,那么我们可以相信这个结果是真实可信的。
重复性的低下可能导致科研成果的无效性和误导性。
由于科学研究是建立在先前研究结果的基础上的,如果先前的研究结果无法重复,那么后续的研究可能会受到影响,甚至会导致整个科学领域的信誉问题。
二、再现性的定义和意义再现性是指在不同的实验条件下,通过独立的实验来得到相似的结果。
再现性的高低可以反映实验结果是否普遍适用于不同的场景和情况。
如果一个研究结果具有良好的再现性,那么我们可以相信该结果不仅仅适用于特定的情况,而且可以推广到更广泛的领域。
再现性是科学研究的核心价值之一、科学研究的目标是发现可重复和可推广的规律和真理,只有当研究结果具有良好的再现性时,我们才能对其进行广泛应用和推广。
三、评估重复性和再现性的方法评估重复性和再现性需要采用科学严谨的方法,以下是几种常见的评估方法:1.独立重复实验:通过独立的实验来验证原始研究结果是否可重复。
为了保证实验的独立性,可以由不同的研究团队或不同的实验室来进行。
2.统计分析:使用统计学方法对多个独立实验的结果进行分析,计算其一致性和可信度。
常用的统计指标包括标准差、相关系数等。
3.文献回顾:通过回顾相关的文献和先前的研究结果,评估重复性和再现性的程度。
还可以参考其他研究者的验证实验结果来判断一个研究的可靠性。
四、重复性和再现性在科学研究中的重要性1.提高研究结果的可靠性:重复性和再现性可以保证研究结果的可靠性和稳定性,避免因为一次实验的偶然性而引起的误解和错误。
2.确保科学方法的有效性:通过重复性和再现性分析,可以评估和验证科学方法的有效性和稳定性。
如果一个方法在多个实验中都能得到相似的结果,那么它就可以被广泛应用。
3.促进科学发展:只有具有良好的重复性和再现性的研究结果才能被广泛接受和应用,从而促进科学知识的进一步发展。
测量系统重复性和再现性分析报告
均值图123 Nhomakorabea4
5
6
7
零件 极差图
UCL LCL
0.537 0.537 0.537
0
0
0
0.537 0
0.537 0
0.537 0
2
3
4
5
6
零件
注:
分析报告
使用公差法 使用零件间变差
XH-JS-CHY-001
XDL-B测厚仪 0.001μm
8
12.114 12.089 12.358 12.187 0.269 11.866 11.843 12.049 11.919 0.206 12.051 12.238 11.985 12.091 0.253 12.066
零 5
14.622 14.532 14.398 14.517 0.224 14.348 14.066 14.135 14.183 0.282 14.531 14.387 14.615 14.511 0.228 14.404
件 6
11.109 11.089 11.014 11.071 0.095 10.991 11.018 11.101 11.037 0.110 10.946 11.212 10.979 11.046 0.266 11.051
日 期:
零件名称
特 性 公差(容差)
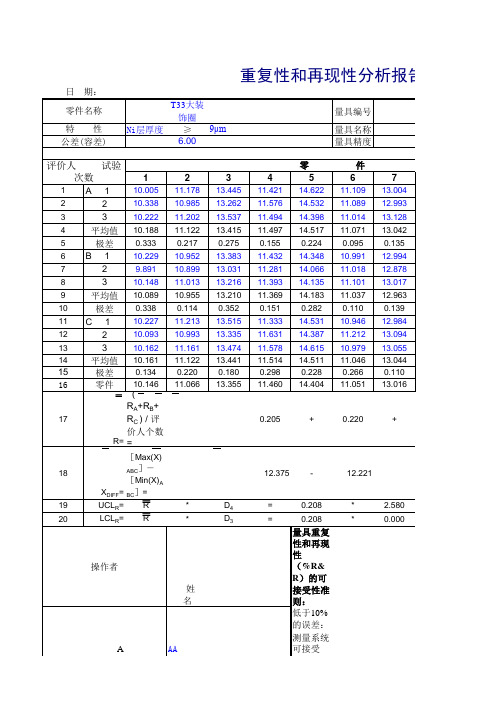
重复性和再现性分析报告
T33大装 饰圈
Ni层厚度 ≥ 9μm 6.00
量具编号
量具名称 量具精度
评价人 试验
次数
1
1 A1
10.005
2
2
10.338
3
3
10.222
4
平均值 10.188
量具测量值重复性与再现性的评定[讲解]
![量具测量值重复性与再现性的评定[讲解]](https://img.taocdn.com/s3/m/63a62ecd370cba1aa8114431b90d6c85ec3a88a1.png)
量具测量值重复性与再现性的评定一、相关概念1、重复性:传统上把重复性看作“评价人内变异性”。
重复性是指由一个评价人,用同一种测量仪器,多次测量同一零件的同一特性时获得的测量变差。
它是设备本身固有的变差和性能,通常指设备变差,尽管这样容易使人误解。
但事实上,重复性是在确定的测量条件下连续试验得到的普通原因(随机变差)变差。
当测量环境固定和已定义时,即确定了-固定的零件、仪器、标准、方法、操作者、环境和假设条件时,对于重复性最佳的术语是系统内部变差。
除了设备内部变差以外,重复性也包括在特定测量误差模型下任何情况下的内部变差。
2、再现性:传统上把再现性看作“评价人之间”的变异。
再现性通常定义为由不同的评价人,采用相同的测量仪器,测量同一零件的同一特性时测量平均值的变差。
手动仪器受操作者技术影响常常是实际情况,然而,在测量过程(即自动操作系统)中操作者就不是主要的变差源了。
由于这个原因,为此,再现性被看作是测量系统之间或测量条件之间的平均变差。
二、数据来源本案例数据节选自深圳市佳宝隆科技有限公司《重复性与再现性分析报告》,为避免重复,笔者采取了其中的前两次测定,结果如下:操作者测量序号 1 2 3 4 5 6 7 8 9 10A 1 31.99 31.98 31.98 31.99 31.99 31.98 31.99 31.98 31.99 31.992 32.00 31.99 31.99 32.00 31.98 31.99 32.00 31.99 31.99 32.00B 1 32.00 31.99 31.99 31.99 31.99 31.98 31.99 31.98 31.99 31.992 31.99 31.99 31.99 32.00 31.99 31.99 32.00 31.99 31.99 32.00C 1 31.99 31.99 31.99 31.99 31.99 31.98 31.99 31.98 31.99 31.992 32.00 31.99 31.99 32.00 31.98 31.99 32.00 31.99 31.99 32.00在该实验中,n=10,k=3,m=2。
量具重复性和再现性报告(含数据表和控制图)

零件名称 测量参数 尺寸规格 根据数据表
PB-JL4002 零件长度 (150±0.2)mm R= 0.017
量具名称 量具编号 量具类型 XDIFF=
游标卡尺
计量 0.020
测量系统分析
重复性 ---- 设备变差(EV)
EV=
R
×
= 0.017
×
= 0.050833333
K1 3.05
再现性 ---- 评价人变差(AV)
试验次数
K1
2
4.56
3
3.05
AV= [( XDIFF
×
K2
)2-(
EV
)2/(
n × r )]
= [( 0.0203 × 3.6500 )2-( 0.050833 )2/( 10 × 3 )] = 0.073634091
评价人
2
3
K2
重复性和再现性(R&R)
R&R
7.7009%
/ TV ] / 0.660 ]
%AV= 100[
AV
/ TV ]
= 100[ 0.073634091 / 0.660092 ]
=
11.1551%
n=样件数量
r=测量次数
%R&R= 100[
R&R
/ TV ]
= 100[ 0.089476294 / 0.660092 ]
=
13.5551%
%PV= 100[
PV
= 100[
0.654
=
99.0770%
/ TV ] / 0.660092 ]
ndc= 1.41( = 1.41( = 10.306
量具重复性再现性分析报告
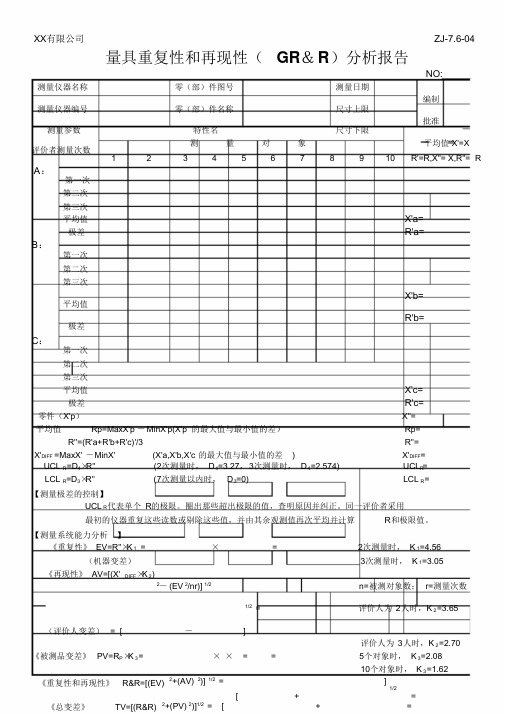
XX有限公司ZJ-7.6-04 量具重复性和再现性(GR&R)分析报告NO:测量仪器名称零(部)件图号测量日期编制测量仪器编号零(部)件名称尺寸上限批准测量参数特性名尺寸下限评价者测量次数A:第一次测量对象平均值X'=X1 2 3 4 5 6 7 8 9 10 R'=R,X''= X,R''= R第二次第三次平均值X'a=极差R'a=B:第一次第二次第三次X'b= 平均值R'b= 极差C:第一次第二次第三次平均值X'c=极差R'c=零件(X'p)X''=平均值Rp=MaxX'p -MinX'p(X'p 的最大值与最小值的差)Rp= R''=(R'a+R'b+R'c)'/3 R''=X'DIFF =MaxX' -MinX' (X'a,X'b,X'c 的最大值与最小值的差) X'DIFF = UCL R=D4×R'' (2次测量时,D4=3.27,3次测量时,D4=2.574) UCL R=LCL R=D3×R'' (7次测量以内时,D3=0) LCL R=【测量极差的控制】UCL R代表单个R的极限。
圈出那些超出极限的值,查明原因并纠正。
同一评价者采用最初的仪器重复这些读数或剔除这些值,并由其余观测值再次平均并计算R和极限值。
【测量系统能力分析】《重复性》EV=R''×K1 = ×= 2次测量时,K1=4.56 (机器变差)3次测量时,K1=3.05 《再现性》AV=[(X' DIFF ×K2)2-(EV 2/nr)] 1/2 n=被测对象数;r=测量次数1/2 = 评价人为2人时,K2=3.65 (评价人变差)= [ -]评价人为3人时,K2=2.70 《被测品变差》PV=R P×K3= ××= = 5个对象时,K3=2.0810个对象时,K3=1.62《重复性和再现性》R&R=[(EV) 2+(AV) 2)] 1/2 = ]1/2[ + = 《总变差》TV=[(R&R) 2+(PV) 2)]1/2 = [ + =①《测量系统评价》%R&R=100×(R&R/TV)= / =②《测量系统评价》%R&R=100 ×(R&R/ 公差)= / = 分析者的判定·分析及总结:6-04 GR&R)分析报告X'=XR''= R被测对象数;r=测量次数。
重复性和再现性

量具重复性与再现性分析:GR&R 是用来检定检测产品的人员是否具备识别产品特性的能力,正常的产品是否会误判,不正常的产品是否会漏判,也就是检定“检测系统是否正常”的一个工具。
GR&R是研究重复性和再现性的,是计量型分析。
1.简称:重复性(EV)(equipm ent varian ce)设备偏差、(再现性AV)(appris er varian ce)人員偏差、产品偏差(PV)(produc ts varian ce),2.重复性(Repeat abili ty):重复性是用本方法在正常和正确操作情况下,由同一操作人员,在同一实验室内,使用同一仪器,并在短期内,对相同试样所作多个单次测试结果,在95%概率水平两个独立测试结果的最大差值。
在中国仪器中当测量条件是在以下4个状况下实验时,相同的待测量的测量结果有一致性的称为重复性,4个条件如下:a、相同的测量环境b、相同的测量仪器及在相同的条件下使用c、相同的位置d、在短时间内的重复3.再现性(Reprod ucibi lity)是指两个不同的实验室对同一物料进行测定两个分析结果接近的程度.再现性的值总是大于或等于重复性,因为再现性的测量结果把重复性引起的偏差考虑进去了。
在很多实际工作中,最重要的再现性指由不同操作者、采用相同的方法、仪器,在相同的环境条件下,检测同一被测物的重复检测结果之间的一致性,即检测条件的改变只限于操作者的改变。
也就是说别人用你说的方法和仪器也能做出同样的结果来,这就是试验的再现性。
当然,这样的试验就叫做再现性实验。
4.测量结果的重复性:是指“在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性”。
上述定义中的“一致性”是定量的,可以用重复性条件下对同一量进行多次测量所得结果的分散性来表示。
重复性和再现性
量具重复性与再现性分析:GR&R 是用来检定检测产品的人员是否具备识别产品特性的能力,正常的产品是否会误判,不正常的产品是否会漏判,也就是检定“检测系统是否正常”的一个工具。
GR&R是研究重复性和再现性的,是计量型分析。
1.简称:重复性(EV)(equipment variance)设备偏差、(再现性AV)(appriser variance)人員偏差、产品偏差(PV)(products variance),2.重复性(Repeatability):重复性是用本方法在正常和正确操作情况下,由同一操作人员,在同一实验室内,使用同一仪器,并在短期内,对相同试样所作多个单次测试结果,在95%概率水平两个独立测试结果的最大差值。
在中国仪器中当测量条件是在以下4个状况下实验时,相同的待测量的测量结果有一致性的称为重复性,4个条件如下:a、相同的测量环境b、相同的测量仪器及在相同的条件下使用c、相同的位置d、在短时间内的重复3.再现性(Reproducibility)是指两个不同的实验室对同一物料进行测定两个分析结果接近的程度.再现性的值总是大于或等于重复性,因为再现性的测量结果把重复性引起的偏差考虑进去了。
在很多实际工作中,最重要的再现性指由不同操作者、采用相同的方法、仪器,在相同的环境条件下,检测同一被测物的重复检测结果之间的一致性,即检测条件的改变只限于操作者的改变。
也就是说别人用你说的方法和仪器也能做出同样的结果来,这就是试验的再现性。
当然,这样的试验就叫做再现性实验。
4.测量结果的重复性:是指“在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性”。
上述定义中的“一致性”是定量的,可以用重复性条件下对同一量进行多次测量所得结果的分散性来表示。
而表示测量结果分散性的量,最为常用的是实验标准。
重复性条件。
质言之,就是在尽量相同的条件下,包括程序、人员、仪器、环境等,以及尽量短的时间间隔内完成重复测量任务。
重 复 性 和 再 现 性 分 析 报 告

文件号:零件名称芯片推力量具编号量具名称>100g 量具精度评价人试验次数123456781 A 1180.500110.000260.000130.500100.200100.200110.200120.60022180.200120.200260.200130.800100.300100.300110.200120.50033180.300120.300260.500130.900100.800100.200110.500120.200180.333116.833260.233130.733100.433100.233110.300120.4330.30010.3000.5000.4000.6000.1000.3000.4006 B 1180.500120.400250.900130.700100.900100.500110.800120.40072170.500110.500250.800130.600100.200100.600110.500120.40083150.600110.600300.000130.800100.200100.800110.300120.500167.200113.833267.233130.700100.433100.633110.533120.43329.9009.90049.2000.2000.7000.3000.5000.10011C 1180.900130.000280.000130.800100.500100.500110.600120.300122190.200130.500280.500120.900100.600100.600110.200120.800133180.500140.000280.800130.900100.800100.700110.600120.700183.867133.500280.433127.533100.633100.600110.467120.6009.70010.0000.80010.0000.3000.2000.4000.500177.1333#######269.3000129.6556100.5000100.4889110.4333120.488917R= ( R A +R B +R C ) / 评价人个数 =3.3600+10.1000+ 3.240018X DIFF =[Max(X)ABC ]-[Min(X)ABC ]=139.900-135.55019UCL R =R *D 4= 5.567*2.58020LCL R =R *D 3= 5.567*0.000 姓 名量具重复性和再现性(%R&R )的可接受性准则:A低于10%的误差: 测量系统可接受B10%至30%的误差: 根据应用的重要性。
重复性和重现性

重复性(r)与再现性(R)2009-8-28 9:33:25精密度:在确定条件下,将测试方法实施多次,求出所得结果之间的一致程度。
精密度的大小常用偏差表示。
精密度的高低还常用重复性(Repeatability)和再现性(Reproducibility)表示。
1)重复性(r)定性定义:用相同的方法,同一试验材料,在相同的条件下获得的一系列结果之间的一致程度。
相同的条件是指同一操作者,同一设备,同一实验室和短暂的时间间隔。
定量定义:一个数值,在上述条件下得到的两次实验结果之差的绝对值以某个指定的概率低于这个数值。
除非另有说明,一般指定的概率为0.95。
{重复性是用本方法在正常和正确操作情况下,由同一操作人员,在同一实验室内,使用同一仪器,并在短期内,对相同试样所作两个单次测试结果,在95%概率水平两个独立测试结果的最大差值。
}2)再现性(R)定性定义:用相同的方法,同一试验材料,在不同的条件下获得的单个结果之间的一致程度。
不同的条件指不同操作者、不同实验室、不同或相同的时间。
定量定义:一个数值,用相同的方法,同一试验材料,在上述的不同条件下得到的两次试验结果之间的绝对值以某个指定的概率低于这个数值。
除非另外指出,一般指定的概率为0.95。
{再现性是用本方法在正常和正确操作情况下,由两名操作人员,在不同实验室内,对相同试样各作单次测试结果,在95%概率水平两个独立测试结果的最大差值}三个表示精密度的概念,在国外的文献中常见:1. 平行性(replicability):同一实验室,分析人员、分析方法均相同,对同一样品进行的多个平行样品之间的相对标准偏差;2. 重复性(repeatability):同一实验室,分析人员用相同的分析法在短时间内对同一样品重复测定结果之间的相对标准偏差;3. 再现性(reproducibility):不同实验室的不同分析人员用相同分析对同一被测对象测定结果之间的相对标准偏差。
量具重复性和再现性数据收集表
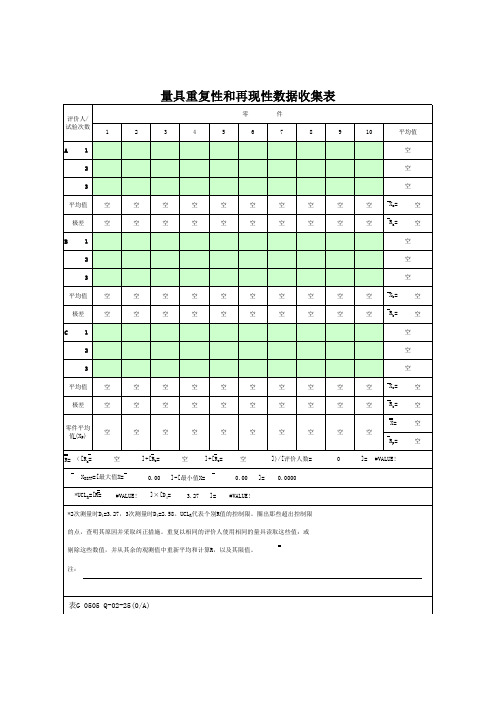
剔除这些数值,并从其余的观测值中重新平均和计算R,以及其限值。
注:
10
平均值
空
空
空
空
Xa=
空
空
Ra=
空
空
空
空
空
Xb=
空
空
Rb=
空
空
空
空
空
Xc=
空
空
Rc=
空
X=
空
空
Rp=
空
]= #VALUE!
表G 0505 Q-02-25(0/A)
供应商Supplier name:
量具重复性和再现性报告
编号No.:
10
0.3146
所有计算均基于预计5.15σ (正态分布曲线下99.0%的面积)。
结论Conclusion:测量系统可以接受。
编制:
审核:
%PV=100[PV/TV] = 100 [ #VALUE! / #VALUE! ] = #VALUE! %
ndc=1.41(PV/GRR) = 1.4(1 #VALUE! / #VALUE! ) = #VALUE!
3
0.5908
再现性-评价人变差(AV) AV= (XDIFF×K2)2-(EV2/(nr))
= ( 0.0000 × 0.7071 )2-( #VALUE! 2/( 10 × 3 ))
= #VALUE!
%AV=100[AV/TV] = 100 [ #VALUE! / #VALUE! ] = #VALUE! %
零件变差(PV)
PV = RP × K3 PV = 空 × 0.5231
= #VALUE!
零件数量
K3
3
0.5231
重复性和再现性
量具重复性与再现性分析:GR&R 是用来检定检测产品的人员是否具备识别产品特性的能力,正常的产品是否会误判,不正常的产品是否会漏判,也就是检定“检测系统是否正常”的一个工具。
GR&R是研究重复性和再现性的,是计量型分析。
1.简称:重复性(EV)(equipment variance)设备偏差、(再现性AV)(appriser variance)人員偏差、产品偏差(PV)(products variance),2.重复性(Repeatability):重复性是用本方法在正常和正确操作情况下,由同一操作人员,在同一实验室内,使用同一仪器,并在短期内,对相同试样所作多个单次测试结果,在95%概率水平两个独立测试结果的最大差值。
在中国仪器中当测量条件是在以下4个状况下实验时,相同的待测量的测量结果有一致性的称为重复性,4个条件如下:a、相同的测量环境b、相同的测量仪器及在相同的条件下使用c、相同的位置d、在短时间内的重复3.再现性(Reproducibility)是指两个不同的实验室对同一物料进行测定两个分析结果接近的程度.再现性的值总是大于或等于重复性,因为再现性的测量结果把重复性引起的偏差考虑进去了。
在很多实际工作中,最重要的再现性指由不同操作者、采用相同的方法、仪器,在相同的环境条件下,检测同一被测物的重复检测结果之间的一致性,即检测条件的改变只限于操作者的改变。
也就是说别人用你说的方法和仪器也能做出同样的结果来,这就是试验的再现性。
当然,这样的试验就叫做再现性实验。
4.测量结果的重复性:是指“在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性”。
上述定义中的“一致性”是定量的,可以用重复性条件下对同一量进行多次测量所得结果的分散性来表示。
而表示测量结果分散性的量,最为常用的是实验标准。
重复性条件。
质言之,就是在尽量相同的条件下,包括程序、人员、仪器、环境等,以及尽量短的时间间隔内完成重复测量任务。
仪器重复性再现性报告分析
仪器重复性再现性报告分析引言:实验方法:在实验中,我们选择了仪器进行了测量测试,并记录了多次重复测量的结果。
实验过程中,保持测试环境、样品条件和操作方法的一致性,以确保实验的可比性和可靠性。
在每次测量中,我们进行了5次重复测量,以获得足够的数据来评估仪器的重复性和再现性。
结果分析:通过对实验数据的分析和统计,我们得到了仪器的重复性和再现性指标。
重复性指标是通过计算同一测量值的多次重复测量的标准偏差来评估的,再现性指标则是通过计算不同测量值的多次重复测量的标准偏差来评估的。
根据实验结果,仪器的重复性指标为X,再现性指标为Y。
重复性指标X符合预期的要求,并且小于允许的误差范围。
这说明仪器的测量结果在同一条件下的重复性较好,具有较高的稳定性和可靠性。
再现性指标Y 也在预期范围内,但相比重复性指标X略有偏大。
这可能是由于在不同测量过程中存在的一些随机误差或人为操作的变化所致。
结论:根据实验结果和数据分析,我们对仪器的重复性和再现性进行了综合评估。
整体上,仪器的重复性和再现性表现良好,可以满足实验和测试的准确性要求。
但也需要注意,在进行实际应用时,应进一步控制和减小可能存在的系统误差和人为误差,以提高测量结果的准确性和可靠性。
建议:为了进一步提高仪器的重复性和再现性,建议可以采取以下几个方面的改进措施:1.精确控制实验环境和样品条件,以减小可能存在的外界干扰和影响。
2.定期检查和维护仪器的性能,确保其稳定性和准确性。
3.给操作人员进行培训和指导,确保操作方法的统一和标准化。
4.增加重复测量次数,以获得更多的数据样本进行分析和评估。
总结:仪器的重复性和再现性是评估仪器性能的重要指标。
本报告通过实验测试和数据分析,对仪器的重复性和再现性进行了评估和分析,并给出了相应的结论和建议。
根据实验结果和数据分析,仪器的重复性和再现性表现良好,但仍需进一步改进措施来提高其准确性和可靠性。
这对于仪器的正常使用和实验测试的可靠性具有重要意义。
重复性和再现性
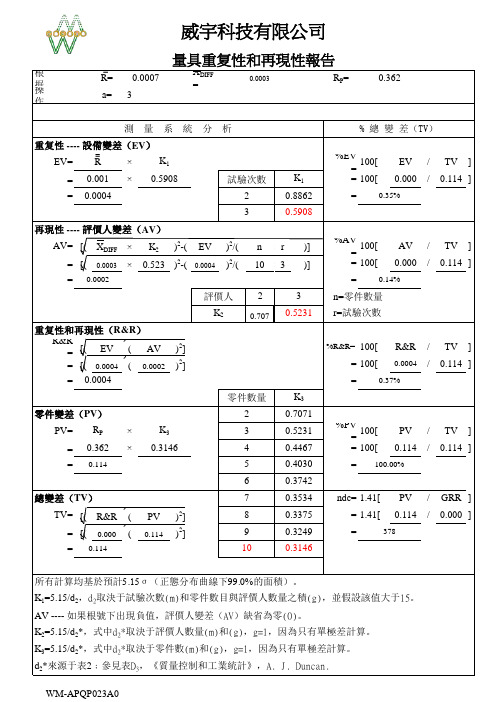
根据數据表R=X DIFF =0.0003R P =操作人數﹕a=3EV=×%EV=100[EV /TV ]=×=100[0.000/0.114]==AV= [(X DIFF ×K 2)2-(EV)2/(n ×r )]%AV=100[AV /TV ]= [(0.0003×0.523)2-(0.0004)2/(10×3)]=100[0.000/0.114]==0.707R&R= [(EV )2+(AV)2]100[R&R/TV ]= [(0.0004)2+(0.0002)2]=100[0.0004/0.114]==PV=×%PV=100[PV /TV ]=×=100[0.114/0.114]==ndc=1.41[PV /GRR ]TV= [(R&R )2+(PV)2]=1.41[0.114/0.000]= [(0.000)2+(0.114)2]==威宇科技有限公司測 量 系 統 分 析% 總 變 差(TV )重复性 ---- 設備變差(EV )0.00070.362K 10.0010.5908試驗次數%R&R=378R 0.35%30.5908再現性 ---- 評價人變差(AV )K 10.000420.8862K 20.5231r=試驗次數重复性和再現性(R&R )0.00020.14%評價人23n=零件數量30.52310.00040.37%零件數量K 3100.00%0.3620.314640.4467零件變差(PV )20.7071R P K 3總變差(TV )70.35340.11450.403080.337590.324960.3742d 2*來源于表2﹔參見表D 3,《質量控制和工業統計》,A. J. Duncan.K 1=5.15/d 2,d 2取決于試驗次數(m)和零件數目與評價人數量之積(g),並假設該值大于15。
汽柴油的重复性和再现性公式
汽油质量检验项目的重复性和再现性计算公式1、溶剂洗胶质GB/T8019重复性计算:未洗胶质含量r=0.997X0.4,溶剂洗胶质含量r=1.298X0.3 X—重复测定结果的算术平均值。
再现性计算:未洗胶质含量R=1.928X0.4,溶剂洗胶质含量R=2.494X0.3 X—两个独立结果的算术平均值。
2、荧光硫SH/T0742重复性计算:r= 12 .30 (X + 1 0 )0.1X—重复测定结果的算术平均值。
再现性计算: R =3 6. 26 (X + 10 )0.1X—两个独立结果的算术平均值。
3、紫光硫SH/T0689重复性计算:r=0.1867X0.63X—重复测定结果的算术平均值。
再现性计算:R=0.2217X0.92X—两个独立结果的算术平均值。
4、硫醇硫GB/1792重复性计算:r=0.00007+0.027XX—重复测定结果的算术平均值。
再现性计算:R=0.00031+0.042XX—两个独立结果的算术平均值。
5、馏程GB/T6536 ℃1)手工法回收点重复性r、再现性R的计算:10%回收点:S=0.05(T20%平均回收温度-T初馏点平均回收温度)r=(S+2.46)/2.44R=(S+1.39)/0.7650%回收点:S=0.05(T60%平均回收温度-T40%平均回收温度)r=(S+2.46)/2.44R=(S+1.39)/0.7690%回收点:S=0.1(T90%平均回收温度-T80%平均回收温度)r=(S+2.46)/2.44R=(S+1.39)/0.76终馏点:S=(T终馏点平均回收温度-T95%平均回收温度)/(V终馏点平均体积-95)r=(S+1.82)/2.66R=(S+6.95)/2.242)自动法回收点重复性r、再现性R的计算:10%回收点:S=0.05(T20%平均回收温度-T初馏点平均回收温度)r=1.2+1.42SR=3.0+2.64S50%回收点:S=0.05(T60%平均回收温度-T40%平均回收温度)r=1.2+1.42SR=2.9+3.97S90%回收点:S=0.1(T90%平均回收温度-T80%平均回收温度)r=1.1+1.08SR=2.0+2.53S终馏点:r=3.5R=10.56、烃的重复性和再现性计算(1)不含含氧化合物样品的重复性和再现性%(体积分数)(2)含有含氧化合物样品的重复性和再现性%(体积分数)7、苯、甲苯重复性和再现性计算%(体积分数)8、醇类和醚类中氧含量的重复性和再现性计算%(质量分数)9、汽油中Fe和Mn含量的重复性和再现性计算mg/LFe重复性:0.65X0.48再现性:0.55X0.79Mn重复性:0.42X1/2再现性:1.41X1/2/a/20100427/004567.htm柴油质量检验项目的重复性和再现性计算公式1、闭口闪点GB/T261重复性计算:0.029XX—重复测定结果的算术平均值。
重复性和再现性

实验结果的准确性:确保实验数据的可靠性和准确性,避免误差和偏差。
实验结果的可重复性:实验结果是否能够被其他研究者重复验证,是判断实验结果可靠性的重要标准。
实验结果的解读:对实验结果进行深入分析和解读,探究实验结果背后的原因和意义。
实验结果的解释:对实验结果给出合理的解释和推测,探究实验结果与理论之间的联系。
Part Three
重复性和再现性的关系
重复性和再现性的联系
添加标题
添加标题
添加标题
添加标题
重复性是指在相同条件下,实验结果的再现程度,即实验结果的可靠性。
重复性和再现性是相关概念,都涉及到实验结果的可靠性和可重复性。
再现性是指在不同条件下,实验结果的再现程度,即实验结果的可重复性。
重复性和再现性的联系在于,一个好的实验应该具备良好的重复性和再现性,以确保实验结果的可靠性和可重复性。
重复性和再现性的协同作用
重复性和再现性的协同作用在科学实践中的应用
重复性和再现性在科学结论中的贡献
重复性和再现性如何提高科学研究的可信度
重复性和再现性在科学实验中的重要性
Part Four
重复性和再现性的影响因素
实验设计
实验操作
实验设计:确保实验条件的一致性,避免误差和干扰因素
实验材料:选择可靠的实验材料,保证实验结果的可靠性
汇报人:XX
强化情感:重复的情感表达可以加深人们对某种情感或情绪的体验,使其更加深刻和持久。
提高技能:通过重复练习来提高技能水平,使人们更加熟练和准确地掌握某种技能或动作。
重复性的应用场景
科学研究:重复实验以验证结果的可靠性
质量控制:确保产品或服务的稳定性和一致性
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GRR 75.5% 过程标准差
现在已确定了这测量系统的%GRR,就应该对这 结果进行解释。在表7中,%GRR被确定为75.7%, 于是结论是需对测量系统进行改进。
平均值和极差法
平均值和极差法(X&R)是一种可 同时对测量系统提供重复性和再现 性的估计值的研究方法。与极差法 不同,这方法允许将测量系统的变 差分解成两个独立的部分:重复性 和再现性,但不能确定它们两者的 相互作用。
7)如果评价人处于不同的班次,可以使用一个替代 的方法。让评价人A测量所有10个零件,将将读值记 录在第1行;然后让评价人A按照不同的顺序重新测 量,并把读值记录在第2行和第3行。评价人B和评价 人C也同样做。
量具重复性和再现性数据收集表
评价人/ 测量次数 1 2 3 A 1 2 3 零 1 0.29 0.41 0.64 2 -0.56 -0.68 -0.58 3 1.34 1.17 1.27 4 0.47 0.50 0.64 5 -0.80 -0.92 -0.84 件 6 0.02 -0.11 -0.21 7 0.59 0.75 0.66 8 -0.31 -0.20 -0.17 9 2.26 1.99 2.01 10 -1.36 -1.25 -1.31 平均值
4
5 6 7 8
平均值
极 差 B 1 2 3 0.08 0.25 0.07 -0.47 -1.22 -0.68 1.19 0.94 1.34 0.01 1.03 0.20 -0.56 -1.20 -1.28 -0.20 0.22 0.06 0.47 0.55 0.83 -0.63 -0.08 -0.34 1.80 2.12 2.19 -1.68 -1.62 -1.50
极差法
极差法是一种经修正的计量型量具研究方法, 它能对测量变差提供一个快速地的近似值。 这方法只能对测量系统提供变差的整体情况, 不能将变差分解成重复性和再现性。它通常 用来快速地检查以验证GRR是否有变化。 使用这方法能够潜在的检测出测量系统为不 可接受的概率是:对于抽样次数是 5 的情况下, 机率为80%;对于抽样次数为10的情况下, 机率为90%。
用极差法进行研究时通常选用两个评价 人与五个零件。在这种研究中,两个评 价人测量每个零件一次。由评价人A测量 的每个零件的极差与由评价人B测量的每 个零件的极差是决然不同的。计算极差 之和以及极差的平均值(R):总测量变 差即为极差的平均值乘以1/d2*,d2*可在 附录 C 中查到,取 m=2 ,且 g= 零件的数 量。
零件
评价人A
评价人B
极差(A,B)
1
2 3 4 5
0.85
0.75 1.00 0.45 0.50
i
0.80
0.70 0.95 0.55 0.60
0.05
0.05 0.05 0.10 0.10
R 极差平均值R 5
0.35 0.07 5
R R 0.07 GRR 0.058 d * 1.19 1 . 19 2
都很相似。如所呈现的,所有的方法在它们的分 析时均忽视了零件内部变差(如:在第四章,第A 节所讨论的圆度、锥度直径、平面度等。) 但是,整个测量系统不仅包括量具本身及其相关 的偏倚、重复性等,还包括被测零件之间的变差。 如何处理零件内部的变差,需要取决于对零件使 用意图以及测量目的的合理理解。 最后,本章节中的所有技术均以过程处于统计的 稳定状态这一前提条件。 尽管再现性通常被解释为评价者变差,但有些情 况下该变差会出其它原因造成。例如对重复性研 究是必要的,对于一些过程中没有人为评价人的 测量系统,如果所有的零件由相同的设备来搬运、 夹具及测量,则再现性为零。
确定重复性和再现性的指南
A
C GRR
B
可以使用不同的方法进行计量型量具的研究。 本节将详细讨论三种可接受的方法。它们是:
极差法(Range method)
均值—极差法(Average and Range hod)
方差分析法(ANOVA method)
除极差法之外,其它方法所用的研究数据的设计
过程标准差 0.0777从之前的研究中取得
GRR %GRR 100* 75.5% 过程标准差
表7:量具研究(极差法)
为了确定测量变差占过程标准差的多少 百分比, 可通过把GRR乘以 100,再除以过程标准差, 即可将GRR转化成百分数。在以上范例中(参 见表 7 ),该特性的过程标准差为 0.0777 ,因 此:
进行研究 尽管评价人的人数、测量次数及零件数量 均可会不同,但下面的讨论呈现进行研究 的最佳情况。参见图12中的GRR数据表, 详细的程序如下: 1)取得一个能代表过程变差实际或预期范围的样 本,为n>5个零件的样本。 2)给评价人编号为A、B、C等,并将零件从1到 n进行编号,但零件编号不要让评价人看到。 3)对量具进行校准,如果这是正常测量系统程序 中的一部分的话。让评价人A以随机顺序测量 n个零件,并将结果记录在第1行。
让评价人A测量第一个零件并将读值记录在第1行; 让平价人B测量第一个零件并将读值记录在第6行; 让评价人C测量第一个零件并将读值记录在第11行。
让评价人A重新测量第一个零件并将读值记录在第2行; 评价人B重新测量第一个零件并将读值记录在第7行; 评价人C重复测量第一个零件并将读值记录在第12行。 如果需要进行三次测量,则重复以上循环,并将数值 记录在第3、8和13行中。
4)让评价人B和C依次测量这些一亲的n个零件, 不要让他们知道别人的读值;然后将结果分别 的记录在第6行和第11行。
5)用不同的随机测量顺序重复以上循环,并将数 据记录在第2、7和12行;注意将数据记录在适 当的栏位中,例如:如果首先被测量的是零件 7,然后将数据记录在标有零件7的栏位中。如 果需要进行三次测量,则重复以上循环,并将 数据记录在第3、8和13行中。 6)当测量大型零件或不可能同时获得数个零件时, 第3步到第5步将变更成以下顺序: