船舶操纵9(1)
科目:船舶操纵(一类三副10)
科目:船舶操纵(一类三副10)中华人民共和国海事局适任培训大纲熟悉训练1.船舶顺浪航行时,主要危害是:() [单选题] *A.拍底B.甲板上浪C.螺旋浆打空车D.尾淹(正确答案)2在航行中发现舵机突然失灵,可采取的措施是:I .减速或停车;Il .使用应急舵;III.立即抛锚。
() [单选题] *A. I、II(正确答案)B.II、IIIC.I、IIID.I、II 、III3.船舶碰撞发生后,当破损部位确定后,应立即___,采取堵漏措施,并通知机舱排水。
() [单选题] *A.搁浅B.掉头C.弃船D.关闭邻近舱室的水密门窗(正确答案)4.影响船舶航向稳定性的因素包括,①纵倾②舵工的操舵技能③船型④舵角。
()[单选题] *A. 1234B.13(正确答案)C.23D. 2345.内河船舶驶靠码头,尾缆的主要作用是防止船舶() [单选题] *A.前移(正确答案)B.后移C.外移D.内移6.船舶在风中的偏转方向取决于() [单选题] *A.风动力中心、船舶重心、水动力中心的相对位置(正确答案)B.风动力中心的位置C.船舶重心的位置D.水动力中心的位置7.船舶在航道宽阔水域掉头,采用哪种方法经济合理() [单选题] *A.连续进车掉头(正确答案)B.正倒车掉头C.进、退车掉头D.抛锚掉头8.对同一船舶,在其它条件相同时,各种锚泊方式下的偏荡从大到小的排列顺序为() [单选题] *A.八字锚、平行错、单锚B.单锚、平行锚、八字锚(正确答案)C.平行锚、单锚、八字锚D.平行锚、八字锚、单锚9.船舶在横倾状态下低速航行,向高舷一侧用舵、舵效__。
() [单选题] *A.好B.差(正确答案)C.不变D.不能确定10.前进中的双车船,采取下列何种操纵方法,才能使船舶向右旋回圈最小?()[单选题] *A.右满舵,左车和右车全速进车B.右满能,右车停车,左车全速进车C右满能,左车全速倒车,右车全速进车D.右满能,右车全速倒车,左车全速进车(正确答案)11.有关图中船舶掉头的说法,正确的是:①掉头前,船舶应先向掉头的相反方向操舵,拉大档子,腾出水域;②船首转向90°时,即位置4时,应停车,控制船舶冲程,然后开倒车;③船舶处于位置3~4开倒车后,在后退中会出现“船尾找风”的现象。
船舶操纵
第五節靠離碼頭繫離泊操縱時,船舶處於低速、大漂角、淺窄水域和舵效差的運動狀態和環境。
由於船舶處於低速運動狀態,因此受其外界風流和周圍環境影響較大,操縱比較困難。
在繫離泊操縱前,必須認真、全面地做好準備工作,並根據客觀實際情況制定完整的操縱計劃。
在靠離泊操縱中,要求沉著冷靜、膽大心細,合理而靈活地運用俥、舵、錨、纜、側推器和拖船等操縱手段。
隨時把船置於最有利的位置,以獲得最大的機動餘地,才能確保繫離泊操縱的順利完成。
一、靠碼頭操縱(一)靠泊計劃1.靠泊前的準備工作(1)掌握本船的船舶特性靠泊前,必須掌握本船的操縱性能,其中包括載重狀況、縱橫傾對操縱的影響,對本船俥、舵、錨、纜等操縱及繫泊設備投入使用的有效性及可靠程度必須有一全面了解,特別是必須了解本船主機進/倒俥換向和頻繁用俥的可靠程度。
(2)靠碼頭前,還必須熟悉掌握外界的客觀條件,其中包括港口、航道、碼頭、泊位(空檔大小一般為船長的120%)的情況,泊位附近風流、水深和船舶交通等資訊。
(3)做好靠泊部署船舶操縱是船上各項工作的聯合作業,全船每一個環節都必須緊密配合,確保各項操作準確、及時,才能使整個操作過程運行自如,並確保靠泊計劃的順利執行。
2.靠泊操縱計劃掌握上述的船舶實況和特性、外界客觀條件及船上人員配備情況,為制定靠泊操縱計劃奠定了良好的條件。
在靠泊前制定全面、完善的靠泊計劃是安全、迅速和順利靠泊的基礎。
靠泊計劃的制定首先應保證其全面性,在進港靠泊的各個過程環節及可能遇到的問題,都需在制定計劃時予以認真考慮。
對任何一個環節可能遇到的問題蘇疏於考慮,都有可能對實際操縱帶來被動。
其次,靠泊計劃中應包含當客觀條件可能發生變化時本船的應變措施。
如有可能,應多考慮幾種方案,以免一旦情況變化,思維缺乏準備,而陷於被動。
通常靠泊操縱方案應包括:進港前的準備、港外航道航行操縱、港內航道航行操縱、靠泊操縱總體安排和各階級的重要實施環節、靠泊中可能遇到的困難和對策等。
船舶操纵系统图解

第一节 操纵系统概述
为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个 统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。 近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。 大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和 远程控制。
一、对操纵系统的要求
在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动 化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。为了保证操纵系统能够可靠 地工作,对船舶柴油机的操纵系统有下列基本要求:
(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相 应的要求。
三、操纵系统和遥控系统的类型
1. 操纵系统的类型 按操纵部位和操纵方式,操纵系统可以分为: 1)机旁手动操纵:操纵台设置在柴油机旁边,使用相应的控制机构操纵柴油机,由轮机员直 接手动操纵,使之满足各种工况下的需要。 2)机舱集中控制室控制:操纵台设置在机舱适当部位的专用控制室内,由轮机员对柴油机实 现操纵和监视。 3)驾驶室控制:在船舶驾驶室内,专设主机遥控操纵台,由驾驶员直接操纵柴油机。 机旁手动操纵是操纵系统的基础,机舱集中控制和驾驶台控制均称为遥控,三者之间常设有转 换装置以便随意转换。每种操纵台上均设操纵手柄,操纵部位转换开关、应急操作按钮及各种显示 仪表,以便对主机进行操纵和运行状态的监视。尽管目前主机遥控技术已经达到了相当高的水平, 但系统中仍然必须保留机旁手动操纵系统,以保证对主机的可靠控制。 2.遥控系统的类型 遥控系统是用逻辑回路和自动化装置代替原有的各种手动操作程序。按遥控系统所使用的能源 和工质,主机遥控系统可分为: 1)电动式遥控系统:以电作为能源,通过电动遥控装置和电力驱动装置对主机进行远距离操 纵。 该系统控制性好,控制准确,遥控距离不受限制,有利于远距离控制;设备简单,不需要油、 气管路,无油、气处理装置,不必担心漏油、漏气;易实现较高程度的自动化,是实现主机遥控的 最佳途径。缺点是管理水平要求高,故障不易发现,操作管理人员要具备一定的电子技术知识。 2)气动式遥控系统:以压缩空气为能源,通过气动遥控装置和气动驱动装置对主机进行远距 离操纵。 气源可直接由起动空气经减压、净化得到,信号传递距离较远,一般在 100 米以内可满足系统 的控制要求,信号受电气、振动、温度等干扰少,动作可靠,故障容易发现,维修方便。但该系统 气源净化品质要求高,需除水、除油、除尘,否则易使气动元件失灵。 3)液力式遥控系统:以油泵产生的压力油作为能源,通过液压阀件和液动机构进行控制。
弯曲水道船舶操纵

弯曲水道中的船舶操纵弯曲水道中的水流向凹岸一边冲压,近凹岸边流速大,凸岸边流速小,加上岸壁效应和浅水效应,使船舶操纵变得困难。
1顶流过弯船位保持在水道中央略偏凹岸一侧,将船首迎着流,慢速顺着凹岸的弯势一点一点地内转,即随时要与岸线保持平行,尽量使船沿着水流流线航进,如图所示。
一旦用舵太迟或过早把定,就会使船首内侧受流而外偏,此时应迅速加车用舵纠正。
当措施无效时,应果断抛双锚,快倒车,以防发生事故。
2顺流过弯过于靠近凹岸航行时,船首将被排开,船尾被吸拢,使船产生转头而横越水道;反之,过于靠近凸岸,船首会受到弯嘴回流的作用而偏转,同时船尾也受到流压,使船冲向凸岸,如图所示。
在顺流中过弯,应保持船位在水道的中央,使船尾坐着流,沿着弯势操舵旋转,与岸线保持平行,顺流中速度不易控制,舵效比较迟钝,为保证顺利过弯,可以提前停车淌航,在到达弯段前突然加车,以提高舵效。
运河中的船舶操纵内河(运河)是连接外海与河港或贯通外海的水道,有天然的和人工两种。
人工内河一般称之为运河。
这种水道一般航道狭窄、水深较浅,给船舶航行带来一定的困难,故必须予以足够的重视。
1航速的选定应符合以下要求:(1) 符合水域主管当局的限速规定;(2) 确保本船的操纵性需要,尤其要确保本船的舵效;(3) 确保能安全避让他船,可实施必要的机动;(4) 尽可能在上述各条均予满足的情况下,提高营运效率。
2保向操纵在河床基本对称的运河中航行时,应保持船位在河面的中线上,则两岸对船的效应基本持平,只需少量左右相等的舵角即可保持所需航向。
对河床不对称的内河或运河,为使船舶驶于航线上需通过保向操纵来进行。
顺直航段,可按航向进行保向操纵。
在由一个直航段转入下一个直航段航行需进行转向时,应根据转向度数和本船的追随性和旋回性等性能,确定舵角和施舵的时机,以便顺利转入下一航向航行。
弯曲航段,一般情况下,因为航向需要连续不断地按航道的走势而改变,常采用沿曲线驶过的方法,所以保向操纵将改为间歇性的转向操纵。
船舶操纵

4.4 船舶操纵控制船舶操纵是指船舶驾驶员根据船舶操纵性能和风、浪、流等客观条件,按照有关法规要求,正确运用操纵设备,使船舶按照驾驶员的意图保持或改变船舶水平运动状态的操作。
下面介绍现代船舶航向控制和船舶主机遥控操纵。
4.4.1 船舶操纵基本原理船舶操纵是一个大系统,由人、船舶和操船环境三个小系统构成,如图4–24所示。
该系统中,船舶驾引人员是主要组成部分,他们通过掌握和处理大量信息,将操船指令输人船舶,使船舶保持或改变运动状态而达到预期的目的。
图4–25为船舶驾引人员操纵船舶流程。
图中信息A 为本船运动状态,信息B为自然环境,信息C 为航行环境,信息D 为操船手册。
操纵船舶运动的机构,主要有舵和推进动力装置。
舵是船舶操纵的重要设备,操舵者通过操舵可以使船舶保持或改变其航向,达到控制船舶方向的目的。
推进器是指把主机发出的功率转换为推船运动的专用装置或系统,目前应用最广泛的推进器是螺旋桨。
螺旋桨分为等螺距螺旋桨、变螺距螺旋桨、固定螺距螺旋桨(FPP )和可调螺距螺旋桨(CPP )等不同类型。
20世纪50年代以来,船舶自动化经历了单元自动化、机舱集中监测与控制以及主机驾驶室遥控等几个阶段。
随后,由于计算机技术和自动化技术在实船上的应用,以及空间技术和通信技术的发展,使得船舶自动化由机舱自动化朝综合自动化和智能化方向发展。
螺旋桨转速舵 角锚的使用缆的使用拖船的使用图4–25 船舶操纵流程图4.4.2 船舶航向控制船舶航向控制的主要任务有二:一是保持航向;二是航向跟踪。
航向操纵部分——自动操舵系统自1922年自动操舵仪(也称自动舵)问世到今天,已经历了机械式自动舵、PID 自动舵和自适应自动舵三个发展阶段,目前正处于第四个研究发展阶段——智能自动舵。
1. 自动操舵系统1) 常规PID 自动舵在航海自动化系统中,船舶是系统的调节对象,若略去动力装置的影响,船舶运动状态的调节,将由舵来实现,并从船首方向表现出来。
第二章 船舶操纵基本知识
第二章船舶操作基本知识船舶操纵是指船舶驾驶人员根据船舶操纵性能和客观环境因素,正确地控制船舶以保持或改变船舶的运动状态,以达到船舶运行安全的目的。
船舶操纵是通过车、舵并借助锚、缆和拖船来实现的。
要完成操纵任务,除保证所有操纵设备处于正常良好的技术状态外,操纵人员必须掌握船舶操纵性能(惯性和旋回性等)及对客观环境(风、流、水域的范围等)的正确估计。
第一节车的作用推动船舶向前运动的工具叫船舶推进器,推进器的种类很多,目前常见的有明轮、喷水器推进器螺旋桨、平旋推进器、侧推器等。
因为螺旋桨结构简单、性能可靠且推进效率高,所以被广泛应用于海上运输船舶。
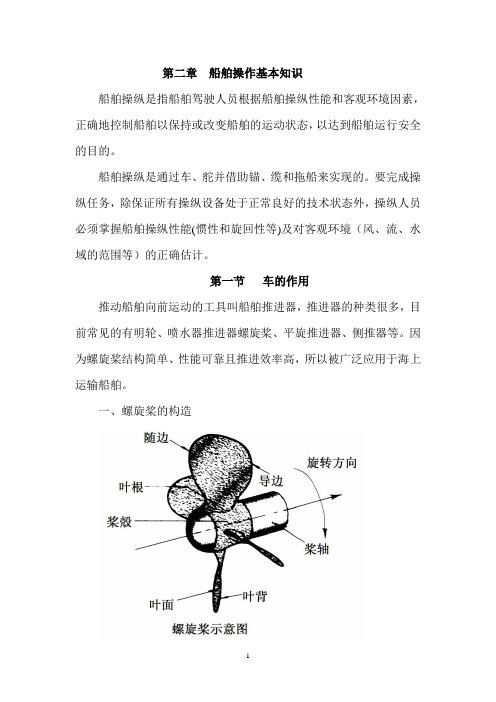
一、螺旋桨的构造1、螺旋桨的材料和组成螺旋桨常用铸锰黄铜、青铜和不锈钢制作。
现在也有采用玻璃制作的。
螺旋桨有桨叶和浆毂两部分组成,连接尾轴上。
(1)桨叶,一般为三片和四片,个别也有五片甚至六片的,低速船采用宽叶,高速船采用窄叶。
(2)桨毂,多数浆毂与桨叶铸成一体。
浆毂中心又圆锥形空,用以套在尾轴后部。
(3)整流帽(4)尾轴2、螺旋桨的配置一般海船都采用单螺旋桨,叫单车船。
也有部分船舶(客船和军舰)采用双螺旋桨,叫双车船。
单桨船的螺旋桨通常是右旋转式的。
右旋是指船舶在前进时,从船尾向船首看,螺旋桨在顺车时沿顺时针方向转动的称为右旋,沿逆时针方向转动的称为左旋。
目前,大多数商船均采用右旋式。
双桨船的螺旋桨按其旋转方向可分为外旋式和内旋式两,对于双桨船,往舷外方向转动的称为外旋,反之称内旋。
通常采用外旋,以防止水上浮物卷入而卡住桨叶。
进车时,左舷螺旋桨左转,右舷螺旋桨右转,则称为外旋式;反之,称为内旋式。
二、推力、阻力和功率1、船舶推力在主机驱动下,螺旋桨正车旋转时推水向后运动,水对螺旋桨的反作用力在船首方向的分量就是推船前进的推力,倒车时则产生指向船尾的拉力。
流向螺旋桨盘面的水流称为吸入流(suction current);离开螺旋桨盘面的水流称为排出流(discharge current)。
船舶操纵的基本原理(共10张PPT)

12、0)影对响右旋旋回单圈桨大船小,的慢因速素航行时,由SWT的作用,向左回转的旋回圈在直径较小,但对V型船尾高速航行掉头时,由于伴流效应横向力
航海吃水和以最大营运船速航行时,将舵从一舷的350转至另一 、船尾体流 横螺倾旋时性,效由应于横左向右力浸均水使体船积首不右等偏,,低且速大时多,能受克阻服力水推面力效转应船横力向矩力作的用作,用操,舵因向此低向舷右侧回转时的, 旋其回旋圈回直圈径直较径小小;于向左回旋的旋回圈 舷的350,或且从任何一舷的350转至另一舷的300的时间应不 直舵径面。 积系数μ越大,旋回圈直径就越小。 及3通量)对常θ≈反应 所9移0的说0量~超时的(1间横2偏过0极距0距为是之)2重指后L要当,8K ,航进s驾向入;驶转员过一应90熟°般时练的掌情横握距况,。以下便准,确操由纵船正舶。舵至一舷350为止的时间约15s左 右。内河船舶装备机动舵机,当L﹥30m时其主操舵装 (反3移)量逆是风指回转转舵时后的,旋船回舶圈重直心径从小原于航顺向风向回操转舵时相的反旋一回侧圈横直移径的;距离。
船舶制动能力是指船舶在某一船速下,主机停车或倒车以后, 船舶对主机工况的反应能力。它可用主机停车或倒车后船舶 对岸相对静止所需的时间和船舶滑行距离的长短来衡量。
第二节 旋回圈要素与船舶操纵性的关系
船舶在定速直航状态下,操某一舵角(一般为满舵),船舶 将作纵向和横向相结合的复合运动,称为旋回运动。船舶 作旋回运动时重心运动的轨迹,称为旋回圈。旋回圈几何 特征是:
船舶操纵的基本原理
船舶改变航行方向的快慢能力。或者船舶受外力作用偏离 了原航向,用舵操纵船舶使它恢复原航向航行的快、慢能 力(或船舶追随航向或舵角的快、慢能力)。追随性的优劣 可用追随性指数T值来衡量。T值越小,操舵时船舶对舵 角响应所需的时间越少,追随性能越好;T值越大,操舵 时船舶对舵角响应所需的时间越多,追随性能越差。
船舶操纵PPT学习教案课件
会计学
1
船舶操纵绪论
概述 船舶操纵运动学参数 船舶操纵动力学参数 船舶阻力与推进
第1页/共46页
船舶操纵概述
船舶操纵的含义 常规船舶操纵(ship handling)包括三种:
保持航向 改变航向 改变船速
第2页/共46页
船舶操纵概述
保持航向(Course keeping or steering)
第32页/共46页
船舶操纵动力学参数
船体水动力及其表 达式
水动力角是指水动力合力FH 方向与船舶首尾线之间的交 角γ;
水动力角可用水动力横向分 量与纵向分量的比值表示
第33页/共46页
船舶操纵动力学参数
船体水动力及其表 达式
水动力角的大小取决于横向 水动力系数和纵向水动力系 数的比值;
第6页/共46页
船舶操纵设备
• 其他设备:
– 侧推器设备; – 外力协助操纵—拖船的协助; – 系泊设备:锚、缆等。
第7页/共46页
船舶操纵特点
• 惯性大,缓变系统 • 控制输入较小 • 欠驱动特性:
控制输入的维数小于被 控自由度维数(dof), 例如,控制输入:车、 舵;被控坐标:横向位 移y1,航向角和纵向 位移x1
船体水动力及水动力矩
深水中,超大型船舶的纵向附加质 量mx≈0.07m;横向附加质量 my≈0.75m;附加惯性矩Jz≈1.0m。
为了研究问题的方便,有的资料将 船舶质量与附加质量之和称为虚质 量,惯性矩与附加惯性矩之和称 为虚惯性矩。
第30页/共46页
船舶操纵动力学参数
船体水动力及其 表达式
第36页/共46页
船舶操纵动力学参数
水动力作用中心
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
– 吸引、排斥、转头、波荡
• 影响因素 • 具体的局面下的船间效应
– 追越 – 对遇 – 驶过系泊船Fra bibliotek本章作业
• 图示分析前进中的船舶在斜顶风、斜顺风航行时 受力与偏转规律,哪种情况易于保向?为什么?
• 图示说明后退中的船舶在正横前、后来风的受力 和偏转规律。
– 船首转向中央航道而“离岸”的现象称为岸推。
• 岸吸(suction、attraction)
– 船体被岸壁“吸拢”的现象称为岸吸。
2、影响因素
• 距岸越近、偏离中心航道越远岸壁效应越 明显。
• 水道宽度越窄,岸壁效应越激烈。 • 水深越浅、岸壁效应越明显。 • 船速越高,岸壁效应越激烈。 • 船型越肥大,岸壁效应越明显。影响岸壁
• 造成碰撞的危险比追越过程中低; • 主要原因:
– 持续时间短; – 船体惯性大;
• 两船船首相平时,切忌用大舵角抑制船首 外转;
• 横距不足时,应向内转向。
五、驶过系泊船
船舶以极近距离驶过系泊船时,系泊船会产生: • 首摇、横摇、横荡、垂荡、纵荡、纵摇(六自由
度) • 原因:
– 船间效应; – 发散波被岸壁反射后对船体的作用。
三、追越中的船间效应
• 追越的原则:
– 深水中,两船间距至少应保持大船的一倍船长, 最好大于两船船长之和;
– 追越的时间越长越危险;被追越船应适当减速 (前提:保证舵效)
– 追越中出现明显的船间效应而致有碰撞危险, 被追越船应适当加车以提高舵效;
四、对遇中的船间效应
• 两船对遇,船间相互作用与位置关系与追 越类似;
• 危害:
– 对系泊船影响最大的是纵荡, – 可能造成断缆等问题,
五、驶过系泊船
• 相关因素
– 水深越浅,影响越大; – 驶过船航速; – 船间距离; – 航道宽度; – 排水量
• 驶过船排水量越大,影响越大, • 系泊船排水量越大,影响越小。
五、驶过系泊船
• 措施:
– 驶过船:
• 保持足够横距 • 减速
• 岸推(repulsion) • 岸吸(suction、attraction)
– 影响因素 – 岸壁效应与保向 – 斜底效应
1、岸壁效应
• 岸壁效应
– 水道宽度受限时,当船舶偏航接近水道岸壁, 因船体两舷所受水动力不同,而出现的船舶整 体吸向岸壁、船首转向中央航道的现象称为岸 壁效应。
• 岸推(repulsion)
效应
3、岸壁效应与保向
• 船舶一舷接近岸壁航行时,为保向需向岸 壁一侧操舵;
• 在中等舵角难以保向时,应加大离岸距离; • 岸推岸吸力较强,出现危险的转头时,不
应盲目减速,以免丧失舵效
4、斜底效应
• 亦称斜坡效应当船舶航行于水深在船宽方 向上不等时,会出现船体吸向浅水而船首 转向深水的现象;
• 原理及相关的因素与岸壁效应类似; • 为保向,需向浅水一舷操舵。
二、影响船间效应的因素
• 两船间距
– 一般当两船间的横距小于两船船长之和时,就会直接 产生这种作用;
– 两船间横距小于两船船长之和的一半时,相互作用明 显增加。两船过度接近则有碰撞的危险。
• 船速:船间作用与船速的平方成正比。 • 作用时间:航向相同比航向相反时影响大。 • 小船受到的影响大。 • 浅窄水域船间效应更为激烈。
上节要点回顾
• 流对船速、冲程、舵效和掉头水域的影响 • 受限水域的影响
– 浅水影响:
• 阻力的增加与降速(出现影响的水深) • 船体下沉与纵倾变化(规律) • 浅水对操纵性的影响(出现影响的水深) • 浅水域航行时的富余水深
– 影响因素 – 经验确定及简单计算
本节主要内容
• 受限水域的影响
– 宽度影响
三、追越中的船间效应
• 危险的现象
– 追越船A接近被追越船B船尾时,B船内转,挡 住A船进路;
– A,B两船有部分重叠时,回转力矩先后达到最 大值,追越船A船船首内转,碰撞被追越船B的 船中或船尾;
– 两船平行,横向作用力很大,两船迅速接近, 追越船A船船尾擦碰B船船中;
– 当A船船首追过B船,两船部分重叠时,被追越 船B船的船首碰撞追越船A的船中或船尾。
• 原因
– 船体周围压力分布发生变化 – 船行波
1、吸引与排斥
• 航进中的船舶,首尾处水位升高,压力增 高从而给靠近航行的他船以排斥作用;
• 船中部附近的水位下降,压力降低,则给 靠近航行的他船以吸引作用。
2、波荡
• 波浪的水质点以一定的速度作轨园运动, 当水质点处于波峰时,其运动方向与波的 传播方向相同(向前运动)、处于波谷时 则与波浪的传播方向现反。
• 处于他船发散波中的船舶,由于相对于波 的位置不同而受到加速或减速的现象,称 之为波荡或无索牵引。
• 兴波越激烈、追越船的吃水越小,波荡现 象越明显。
3、转头
• 处于他船发散波中的船舶,当其船首向与 他船发散波方向存在夹角时,即船舶斜向 与发散波遭遇时,由于波中水质点作轨园 运动,导致波峰处的船体部分受波的前进 方向的力,而波谷处的船体部分则受相反 方向的力,其结果构成了力矩使船首转头。
第四节 船间效应
• 船间效应的现象
– 吸引、排斥、转头、波荡
• 影响因素 • 具体的局面
– 追越 – 对遇 – 驶过系泊船
一、船间效应的现象
• 现象
– 船舶在近距离上对驶会船、或追越、或驶过系 泊船时,在两船之间产生的流体作用,将使船 舶出现互相吸引、排斥、转头、波荡等现象, 称之为船间效应(interaction)
• 岸壁效应(bank effect) • 影响因素 • 岸壁效应与保向
• 船间效应
– 吸引、排斥、转头、波荡 – 影响因素 – 各种局面下的船间效应
• 追越 • 对遇 • 驶过系泊船
第三节 受限水域的影响
• 影响船舶操纵的水深及航道宽度 • 浅水影响 • 宽度影响
三、宽度影响
• 岸壁效应(bank effect)
– 系泊船:
• 应对缆绳和碰垫作必要的调整:
– 尤其是应使各缆绳均匀受力; – 避免某根缆绳单独过紧或过松。
• 系泊船应停止有关可能受影响的作业 • 应对舷梯做出必要调整,避免船体移动而发生擦碰
等事故
本节主要内容
• 受限水域的影响-宽度影响
– 岸壁效应(bank effect)
• 岸吸(suction、attraction)、岸推(repulsion)、斜坡效应