结构动力学题解(1)
结构动力学题解(1)

题图
23 l 3 = 1536 EI
则系统的自振频率
ω=
1 1536 EI = mδ 23ml 3 1 1536 EI = 2 ω 1536 EI − 23ml 3ω 2 1− ω2 1536 EI 23l 3 ⋅ ⋅F 1536 EI − 23ml 3ω 2 1536 EI
2 2 1 l12 l2 l12 k1 + l2 k2 = 1 / m + 3 2 3EI (l + l ) (l + l ) k k mδ 1 2 1 2 1 2
(e) 解,考虑质体水平单位位移时的系统劲度。
k1 = k3 = k2 =
12 EI 2 h3
3EI 2 h3
令 δ t 为两支座弹簧无限刚度时单位力作用下质体的垂直位移
1 1 l1l2 2 l1l2 l12 l22 δt = × (l1 + l2 ) × × = 3 EI (l1 + l2 )2 3 (l1 + l2 )2 2 3EI (l1 + l2 )
总变形: δ = δ t + δ M 其自振频率: ω =
F (t ) = F sin ω t
y0 =
l3 3EI 3EI ml 3
题图
系统自振频率 ω =
动力系数 µ =
1 3EI = 2 ω 3EI − ml 3ω 2 1− ω2 3EI l3 Fl 3 ⋅ ⋅ F = 3EI − ml 3ω 2 3EI 3EI − ml 3ω 2
&& , Fi1 = Fi 2 = mY
两柱的侧移劲度相等为: k =
3i 3EI = 3 (单位位移下的水平剪力) l2 l
结构动力学习题解析
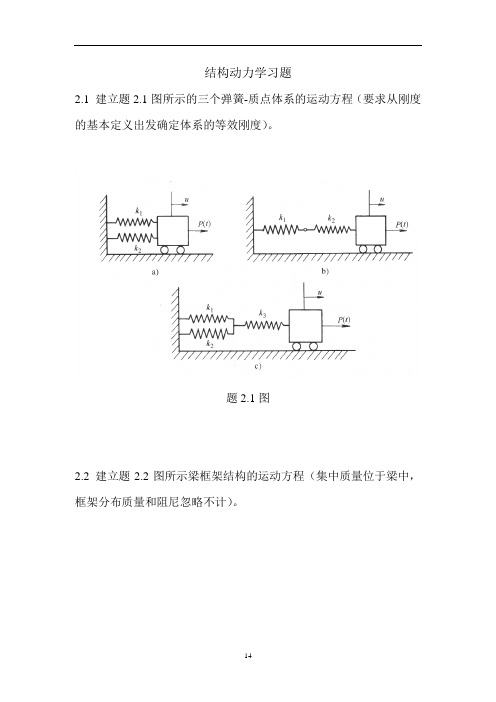
结构动力学习题2.1 建立题2.1图所示的三个弹簧-质点体系的运动方程(要求从刚度的基本定义出发确定体系的等效刚度)。
题2.1图2.2 建立题2.2图所示梁框架结构的运动方程(集中质量位于梁中,框架分布质量和阻尼忽略不计)。
题2.2图2.3 试建立题2.3图所示体系的运动方程,给出体系的广义质量M、广义刚度K、广义阻尼C和广义荷载P(t),其中位移坐标u(t)定义为无重刚杆左端点的竖向位移。
题2.3图2.4 一总质量为m1、长为L的均匀刚性直杆在重力作用下摆动。
一集中质量m2沿杆轴滑动并由一刚度为K2的无质量弹簧与摆轴相连,见题 2.4图。
设体系无摩擦,并考虑大摆角,用图中的广义坐标q1和q2建立体系的运动方程。
弹簧k2的自由长度为b。
题2.4图2.5 如题2.5图所示一质量为m1的质量块可水平运动,其右端与刚度为k的弹簧相连,左端与阻尼系数为c的阻尼器相连。
摆锤m2以长为L的无重刚杆与滑块以铰相连,摆锤只能在图示铅垂面内摆动。
建立以广义坐标u和θ表示的体系运动方程(坐标原点取静平衡位置)。
题2.5图2.6如题2.6图所示一质量为m1的质量块可水平运动,其上部与一无重刚杆相连,无重刚杆与刚度为k2的弹簧及阻尼系数为c2的阻尼器相连,m1右端与刚度为k1的弹簧相连,左端与阻尼系数为c1的阻尼器相连。
摆锤m2以长为L的无重刚杆与滑块以铰相连,摆锤只能在图示铅垂面内摆动。
建立以广义坐标u和θ表示的体系运动方程(坐标原点取静平衡位置,假定系统作微幅振动,sinθ=tanθ=θ)。
计算结果要求以刚度矩阵,质量矩阵,阻尼矩阵的形式给出。
3.1单自由度建筑物的重量为900kN,在位移为3.1cm时(t=0)突然释放,使建筑产生自由振动。
如果往复振动的最大位移为2.2cm(t =0.64s),试求:(1)建筑物的刚度k;(2)阻尼比ξ;(3)阻尼系数c。
3.2 单自由度体系的质量、刚度为m=875t,k=3500kN/m,且不考虑阻尼。
在线测试题试题库及解答(第十章)结构动力学
在线测试题试题库及解答第十章结构动力学基础一、单项选择题1、结构的主振型与什么有关?A、质量和刚度B、荷载C、初始位移D、初始速度标准答案A2、结构的自振频率与什么有关?A、质量和刚度B、荷载C、初始位移D、初始速度标准答案A3、单自由度体系在简谐荷载作用下,下列哪种情况内力与位移的动力系数相同?A、均布荷载作用B、荷载作用在质点上与质点运动方向垂直C、荷载不作用在质点上D、惯性力与运动方向共线标准答案D4、具有集中质量的体系,其动力计算自由度A、等于其集中质量数B、小于其集中质量数C、大于其集中质量数D、以上都有可能标准答案D5、具有集中质量的体系,其动力计算自由度A、等于其集中质量数B、小于其集中质量数C、大于其集中质量数D、以上都有可能标准答案D6、当简谐荷载作用于有阻尼的单自由度体系质点上时,若荷载频率远远大于体系的自振频率时,则此时与动荷载相平衡的主要是A、弹性恢复力B、重力C、阻尼力D、惯性力标准答案D7、设ω为结构的自振频率,θ为荷载频率,β为动力系数下列论述正确的是A、ω越大β也越大B、θ/ω越大β也越大C、θ越大β也越大D、θ/ω越接近1,β绝对值越大标准答案D8、如果体系的阻尼增大,下列论述错误的是A、自由振动的振幅衰减速度加快B、自振周期减小C、动力系数减小D、位移和简谐荷载的相位差变大标准答案B9、无阻尼单自由度体系在简谐荷载作用下,共振时与动荷载相平衡的是A、弹性恢复力B、惯性力C、惯性力与弹性力的合力D、没有力标准答案D10、有阻尼单自由度体系在简谐荷载作用下,共振时与动荷载相平衡的是A、弹性恢复力B、惯性力与弹性力的合力C、惯性力D、阻尼力标准答案D11、当简谐荷载作用于无阻尼的单自由度体系质点上时,若荷载频率远远小于体系的自振频率时,则此时与动荷载相平衡的主要是A、弹性恢复力B、阻尼力C、惯性力D、重力标准答案A12、一单自由度振动体系,其阻尼比为ξ,动力系数β,共振时下列结果正确的是A、ξ=0.05,β=10B、ξ=0.1,β=15C、ξ=0.15,β=20D、ξ=0.2,β=25标准答案A13、一单自由度振动体系,由初始位移0.685cm,初始速度为零产生自由振动,振动一个周期后最大位移为0.50cm,体系的阻尼比为A、ξ=0.05B、ξ=0.10C、ξ=0.15D、ξ=0.20标准答案A14、在低阻尼体系中不能忽略阻尼对什么的影响?A、频率B、主振型C、周期D、振幅标准答案D15、单自由度体系受简谐荷载作用,ω为体系自振频率,θ为荷载频率,动位移y(t)与荷载P(t)的关系是A、当θ/ω>1时,y(t)与P(t)同向,当θ/ω<1时,y(t)与P(t)反向。
结构动力学习题解答一二章
2、 动量距定理法
适用范围:绕定轴转动的单自由度系统的振动。
解题步骤:(1) 对系统进行受力分析与动量距分析;
(2) 利用动量距定理J ,得到系统的运动微分方程;
(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
3、 拉格朗日方程法:
;
1、7求图1-36所示齿轮系统的固有频率。已知齿轮A的质量为mA,半径为rA,齿轮B的质量为mB,半径为rB,杆AC的扭转刚度为KA,,杆BD的扭转刚度为KB,
解:由齿轮转速之间的关系 得角速度 ;转角 ;
系统的动能为:
CA
;B D
图1-36
系统的势能为:
;
系统的机械能为
;
由 得系统运动微分方程
;
适用范围:所有的单自由度系统的振动。
解题步骤:(1)设系统的广义坐标为 ,写出系统对于坐标 的动能T与势能U的表达式;进一步写求出拉格朗日函数的表达式:L=T-U;
(2)由格朗日方程 =0,得到系统的运动微分方程;
(3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
4、 能量守恒定理法
1、2叙述用衰减法求单自由度系统阻尼比的方法与步骤。
用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法与共振法。
方法一:衰减曲线法。
求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期与相邻波峰与波谷的幅值 、 。
(2)由对数衰减率定义 , 进一步推导有
,
因为 较小,所以有
。
方法二:共振法求单自由度系统的阻尼比。
;L/2L/2
则固有频率为:
图1-33(b)
结构动力学习题解答(一二章)
结构动力学习题解答(一二章)第一章单自由度系统总结求单自由度系统固有频率的方法和步骤。
单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法和能量守恒定理法。
1、牛顿第二定律法适用范围:所有的单自由度系统的振动。
解题步骤:(1)对系统进行受力分析,得到系统所受的合力;(2)利用牛顿第二定律∑xm ,得到系统的运动微分方=F程;(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
2、动量距定理法适用范围:绕定轴转动的单自由度系统的振动。
解题步骤:(1)对系统进行受力分析和动量距分析;(2)利用动量距定理J∑θ ,得到系统的运动微分方程;=M(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
3、拉格朗日方程法:适用范围:所有的单自由度系统的振动。
解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 和势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ;(2)由格朗日方程θθ??-LL dt )( =0,得到系统的运动微分方程;(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
4、能量守恒定理法适用范围:所有无阻尼的单自由度保守系统的振动。
解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 和势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const(2)将能量守恒定理T+U=Const 对时间求导得零,即0)(=+dtU T d ,进一步得到系统的运动微分方程;(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
叙述用衰减法求单自由度系统阻尼比的方法和步骤。
用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法和共振法。
方法一:衰减曲线法。
求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期和相邻波峰和波谷的幅值i A 、1+i A 。
(2)由对数衰减率定义 )ln(1+=i iA A δ,进一步推导有 212ζπζδ-=,因为ζ较小,所以有πδζ2=。
结构力学课后答案第10章结构动力学

10-34试说明用振型分解法求解多自由度体系动力响应的基本思想,这一方法是利用了振动体系的何种特性
10-35试用振型分解法计算题10-32。
解:
刚度矩阵 质量矩阵
其中
由刚度矩阵和质量矩阵可得:
则 应满足方程
其稳态响应为:
同理:
显然最大位移
10-36试用振型分解法计算题10-31结构作有阻尼强迫振动时,质量处的最大位移响应。已知阻尼比ξ1=ξ2=。
得振型方程:
)
,令
,由频率方程D=0
解得: ,
,
(c)
解:
图 图
(1) , ,
(2)振型方程
。
令 ,频率方程为:
(3)当 时,设
当 时,设
绘出振型图如下:
第一振型 第二振型
(d)
解:
#
图 图
频率方程为:
取 代入整理得:
其中
~
振型方程为:
将 代入(a)式中的第一个方程中,得:
绘出振型图如下:
第一振型 第二振型
\
解:
若 为静力荷载,弹簧中反力为 。
已知图示体系为静定结构,具有一个自由度。设为B点处顺时针方向转角 为坐标。建立动力方程:
则弹簧支座的最大动反力为 。
10-21设图a所示排架在横梁处受图b所示水平脉冲荷载作用,试求各柱所受的最大动剪力。已知EI=6×106Nm2,t1=,FP0=8×104N。
(a)
设 ,
;
使 ,则
(2)
设
如果使速度响应最大,则 最大,设 ,显然要求 最小。使: 得 。
(3)
令 显然要求 最小。
则 解的:
结构动力学思考题解答
结构动力学思考题made by 云屹思考题一1、结构动力学与静力学的主要区别是什么?结构的运动方程有什么不同?主要区别为:(1)动力学考虑惯性力的影响,静力学不考虑惯性力的影响;(2)动力学中位移等量与时间有关,静力学中位移等量不随时间变化;(3)动力学的求解方法通常与荷载类型有关,静力学一般无关。
运动方程的不同:动力学的运动方程包括位移项、速度项和加速度项;静力学的平衡方程只包括位移项。
2、什么是动力自由度?什么是静力自由度?区分动力自由度和静力自由度的意义是什么?动力自由度:确定结构体系质量位置的独立参数;静力自由度:确定结构体系在空间中的几何位置的独立参数。
意义:通过适当的假设,当静力自由度数大于动力自由度数时,使用动力自由度可以减少未知量,简化计算,提高计算效率。
3、采用集中质量法、广义坐标法和有限元法都可以使无限自由度体系简化为有限自由度体系,它们所采用的手法有什么不同?4、在结构振动的过程中引起阻尼的原因有哪些?(1)材料的摩擦或材料变形引起的热耗散;(2)构件连接处或结构构件与非结构构件之间的摩擦;(3)结构外部介质的阻尼。
5、在建立结构运动方程时,如考虑重力的影响,动位移的运动方程有无改变?如果满足条件:(1)线性问题;(2)重力的影响预先被平衡;则动位移的运动方程不会改变,否则会改变。
思考题二1、刚度系数k ij和质量系数m ij的直接物理意义是什么?如何直接用m ij的物理概念建立梁单元的质量矩阵[M]?k ij:由第j自由度的单位位移所引起的第i自由度的力;m ij:由第j自由度的单位加速度所引起的第i自由度的力。
依次令第j(j=1,2,3,4)自由度产生单位加速度,而其他的广义坐标处保持静止,使用平衡方程解出第i自由度上的力,从而得到m ij,集成得到质量矩阵[M]。
2、如何用刚度矩阵和质量矩阵,以矩阵的形式表示多自由度体系的势能和动能?{}[]{}1=2TT u M u {}[]{}1=2TV u K u3、建立多自由度体系运动方程的直接动力平衡法和拉格朗日方程法的优缺点是什么? (1)直接动力平衡法:优点:概念直观,易于通过各个结构单元矩阵建立整体矩阵,便于计算机编程。
结构动力学1~15
《结构动力学》习题答案1~151. 1简述求多自由度体系时程反应的振型叠加法的主要步骤 答1)建立多自由度体系的运动方程)()()()(t p t kv t v c t vm =++ 2)进行振型和频率分析对无阻尼自由振动,这个矩阵方程能归结为特征问题)(ˆ2t p vm k =-ω 由此确定振型矩阵φ和频率向量ω 3)求广义质量和荷载依次取每一个振型向量n φ,计算每一个振型的广义质量和广义荷载n T n nm Mφφ= )()(t p t p Tn n φ=4)求非耦合运动方程用每个振型的广义质量、广义力、振型频率n ω和给定的振型阻尼比n ξ就能写出每一个振型的运动方程2)(2)(ωωξ++t Y t Y n n n n nn nMt P t Y )()(=5)求对荷载的振型反应根据荷载类型,用适当的方法解这些单自由度方程,每一个振型的一般动力反应表达式用Duhamel 积分给出ττωτωξτωd t t P M t Y Dn n n tn nn n )(sin )](exp[)(1)(0---=⎰写出标准积分形式τττd t h P t Y n tn n )()()(0-=⎰式中)](exp[)(sin 1)(τωξτωωτ---=-t t M t h n n Dn nn n 10<<n ξ6)振型自由振动每一个振型有阻尼自由振动反应的通式为)exp[]sin )0()0(cos )0([)(t t Y Y t Y t Y n n Dn Dnnn n n Dn n n ωξωωωξω-++=7)求在几何坐标中的位移反应通过正规坐标变换求几何坐标表示的位移式)()()()(2211t Y t Y t Y t V n n φφφ+++=显然,它反映了各个振型贡献的叠加。
因此命名为振型叠加法。
8)弹性力反应抵抗结构变形的弹性力)()()(t Y k t kv t f s φ==当频率、振型从柔度形式的特征方程中求出时,可以采用另一种弹性力的表达式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用虚位移原理,设 B 处产生竖向虚位移 δY
& (t )δY − kY (t )δY − 1 m lY &&(t ) δY × 2 − 1 m l 2Y &&(t ) δY × 2 + pf (t ) l 1 δY = 0 δW = −cY 2 2 12 l 23 2 && & (t ) + kY (t ) = 1 pf (t )l m lY (t ) + cY 3 6
题图
23 l 3 = 1536 EI
则系统的自振频率
ω=
1 1536 EI = mδ 23ml 3 1 1536 EI = 2 ω 1536 EI − 23ml 3ω 2 1− ω2 1536 EI 23l 3 ⋅ ⋅F 1536 EI − 23ml 3ω 2 1536 EI
代入 y1 ,经整理得:
广义质量 m* =
m 3
广义劲度 k * =
广义阻尼 c* = c
广义载荷 F * (t ) =
5、试列出图(a)与(b)所示系统的运动方程,并计算各系数(不考虑阻尼的影响) (a)
F(t)
m
m
EI 常数
l
[解] 取质体的水平位移为 Y ,水平虚位移为 δY 质体上的惯性力
广义质量 m* =
3 4 3 m2 + m1 广义劲度 k * = k B 16 3 4
广义载荷 F * (t ) = 0
广义阻尼 c* = 0
第二章 单自由度系统的振动
1、试计算图示各结构的自振频率。设各杆的质量略去不计。 (a) 解: 求单位力作用下的位移 δ ,如答图 利用图乘法:
3 1 1 l 2 l l δ= × l × × × × 3 = EI 2 2 3 2 4 EI
q( x, t ) = q x f (t ) 3l
EI = ∞
[解] 取 D 点向上的位移为 Y
q( x, t ) = q x f (t ) 3l
EI = ∞
设 y1 为中间变量。 k1 弹簧的力为 k1 y1 − Y
1 3
梁 AB :
∑M ∑M
A
=0
1 Y q f (t ) ⋅ 3l ⋅ l − k1 y1 − ⋅ 2l = 0 2 3 && 3l 1 && 2Y & Y Y 2 Y k1 y1 − l − m − m(3l ) − c ⋅ 2l − k 2Y ⋅ 3l = 0 3 2 2 12 3l 3
题图
k1 k 2 k3 值的计算参考位移法中的形常数
系统总劲度:
k = ∑ ki =
27 EI 2 h3
答图
其自振频率:
ω=
k 27 EI 2 = M Mh 3
(f) 解:考虑质体有单位垂直位移时的系统劲度
k1 =
12 EI1 (l1 / 2)3
k2 =
12 EI 2 (l2 / 2)3 48E l I + l I ll
2 2 1 l12 l2 l12 k1 + l2 k2 = 1 / m + 3 2 3EI (l + l ) (l + l ) k k mδ 1 2 1 2 1 2
(e) 解,考虑质体水平单位位移时的系统劲度。
k1 = k3 = k2 =
12 EI 2 h3
3EI 2 h3
F (t ) = F sin ω t
y0 =
l3 3EI 3EI ml 3
题图
系统自振频率 ω =
动力系数 µ =
1 3EI = 2 ω 3EI − ml 3ω 2 1− ω2 3EI l3 Fl 3 ⋅ ⋅ F = 3EI − ml 3ω 2 3EI 3EI − ml 3ω 2
Fs = kY (t )
利用虚位移原理,设 B 处产生竖向虚位移 δY
1 & 1 &&(t ) 1 δY − 9 m l 2Y &&(t ) δY − 1 c Y & δY + lq(t ) 3 δY − kY (t )δY = 0 δW = − c1Y (t ) δY − 3 m l Y 2 (t ) 2 2 4 4 8 2l 2 2 4 考虑到 δY 的任意性,上式可以简化为:
EI = ∞
m
[解] 取 B 处的竖向位移 Y 为基本未知量,则其他各个力处相应的位移均可以用 Y 及其导数 进行表示。如图。
1 d 1 & Y = c1Y (t ) 2 dt 2 1 && &&(t ) Fi1 = m ⋅ 3l Y (t ) = 3 m l Y 4 4 Fd1 = c1 M1 = J Fd 2 = c2 &&(t ) 1 && 1 2Y 9 2 1 2Y (t ) &&(t ) = m (3l )(3l ) = m l 2Y 4 l 12 4 l 8 1 d & 1 & Y (t ) = c2Y (t ) 2 dt 2
2、图示 L 型刚架,其单位质量 m , BA 、 BC 两杆的 EI = ∞ ,刚架所受的载荷以及约束 见图。试求广义单自由度系统的 m * 、 k * 、 c * 、 F * (t ) ,写出其运动方程。
Fd q( x, t ) = p
m EI = ∞
C Mi2 Fi2 Fi1 A l
x f (t ) l l
&& , Fi1 = Fi 2 = mY
两柱的侧移劲度相等为: k =
3i 3EI = 3 (单位位移下的水平剪力) l2 l
忽略顶部横梁部分的轴向变形 如图:
Fi1 F(t) Fs1 m m Fs2 Fi2
取
∑F
x
=0:
F (t ) − Fi1 − Fi 2 − Fs1 − Fs 2 = 0 && − 2kY = 0 F (t ) − 2mY && + 6 EI Y = F (t ) 2mY l3
梁 CD :
C
=0
由上两式消去中间变量 y1 :
&& + 4 cY & + 3k Y = 3 qf (t )l mY 2 3 4
广义质量 m* = m 广义劲度 k * = 3k 2
3 qlf (t ) 4 4、图示结构系统, AB 、 CD 两杆 EI = ∞ ,略去 AB 的质量, CD 杆的总质量为 m ,系统
广义阻尼 c* = 广义载荷 F * (t ) = 所受载荷及约束如图,试求此广义单自由度系统的 m * 、 k * 、 c * 、 F * (t ) ,写出其运动 方程。
q(t) A
4 c 3
k1
EI = ∞
B k2 C D c l/2
l
l
l/2
[解] 取 B 点向上的位移 Y ,
q(t) A y1 B Fs2 Mi C Y Fc
题图
其自振频率:
ω=
1 4 EI 2 EI = = mδ ml 3 l ml
答图
(b) 解 如答图 利用图乘法求单位力情况下的位移 δ ,
m EI1=∞ EI2 l
δ=
1 1 2 lh 2 × l × h× h = EI 2 2 3
ω=
1 3EI 2 = mδ mh 2l
F (t ) = F sin ω t
受迫振动的振幅:
ymax = µ y0 F =
(b) 利用图乘法求质体在单位力作用下的垂直位移。 可利用力法或位移法画出单位力作用下的弯矩图。
δ1 =
1 1 l l 2 13 l 1 l l 5l + × × × × × × × EI 2 2 4 3 64 2 2 4 48
广义质量 m* = 2m 广义阻尼 c* = 0 (b) 广义劲度 k * =
6 EI l3
广义载荷 F * (t ) = F (t )
EI = ∞
[解] 取 m1 的竖向位移为 Y
∑M
A
=0
3 && l 3 && 4 l = 0 m2 Y + k B Y ⋅ l + m1Y 8 2 4 3
4 && 3 3 + k BY = 0 m2 + m1 Y 3 4 16
2 ml 3 广义劲度 k * = k 广义阻尼 c* = c 1 广义载荷 F * (t ) = pf (t )l 6
广义质量 m* = 3、图示结构系统, AB 、 CD 两杆 EI = ∞ ,略去 AB 的质量, CD 杆的总质量为 m ,系统 所受载荷及约束如图,试求此广义单自由度系统的 m * 、 k * 、 c * 、 F * (t ) ,写出其运动 方程。
(d) 单位力作用下可知:
l2 l Fs 2 = 1 l1 + l2 l1 + l2 l2 l1 δ1 = δ2 = (l1 + l2 )k1 (l1 + l2 )k2 Fs1 =
令 δ M 为梁无限刚度时的质体垂直位移
k1 Fs1
题图 m 1 EI k2 Fs2 答图
δM
l = δ1 + (δ 2 − δ1 ) 1 l1 + l2 l1 l2 l2 l1 + − (l1 + l2 )k1 (l1 + l2 )k1 (l1 + l2 )k2 (l1 + l2 ) l 2k + l 2k = 1 1 22 2 (l1 + l2 ) k1k2 =