机器人灭火项目PPT演示文稿
设计灭火机器人粤高教版九年级信息技术下册公开课课件PPT
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
1.编程思路的设计原则: 设计原则:自上而下,逐步细化。
2.小组讨论:复杂程序的总体设计思路?
总体结构 细化 分支结构 细化 细分结构 总体目标 细化 功能目标 细化 细分目标
组长:总体思路框架。 主程序员:编写主程序。 子程序员1:编写搜寻程序。 子程序员2: 编写灭火程序。
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】 设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
风扇的位置安装是否合理? 电机的速度设置的是否合理? 火焰传感器的灵敏度设置是否合理?
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
1.比赛规则:交叉计分,以小组为单位计 分,分数相同的,时间短者获胜。
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
拓展
小组探讨: 机器人在完成 灭火后,还有 其他方法返回
原地吗?
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
任务分解,精简流程
2.完成子程序后,仿真,分段调试。
设计灭火 机器人 粤高教 版九年 级信息 技术下 册课件 【公开 课课件 】
完善程序
苏科版九年级信息技术全册 课件 - 3.2机器人灭火(共12张PPT)
目录
CONTENTS
1 活动要求 2 任务分析 3 程序流程图
探究学习
• 学习目标:综合运用各种传感 器制件灭火机器人并进行小组 比赛。
• 学习感悟:没有规矩,不成方 圆。
• 实践创作:制作灭火机器人。
一、活动要求
在“学生机器人”上搭载电扇,并在模拟房间的任意 位置点燃一根蜡烛,蜡烛的周围有一圈白线,机器人开始 在任何位置处搜寻蜡烛,找到蜡烛后,停在白线上用电扇 将火吹灭,如图所示。
(1)竞技比赛中,规则的制 订对比赛的结果起着决Байду номын сангаас性的作 用。试着制订机器人灭火比赛规 则,将规则执行情况填写在下表 中。
规则要点
蜡烛摆放位置
规则参数一
机器人起始位置
蜡烛高度
电扇转动(功率)
比赛所用时间
结论
上网查找各类机 器人
灭火比赛的规则
规则参数二
规则参数三
(2)进行机器人灭火比赛,以 所用时间的长短排列名次,用时最 短者获胜。
机器人灭火的模拟环境
二、任务分析
通过红外接收传感器判 断火焰的方向和距离,从而 控制机器人寻找火源。找到 火源后,机器人停在蜡烛前 的白线上,将火焰吹灭。
1.准备好机器人和实验场地。 2.启动“学生机器人平台”,先 执行“文件→打开”命令,打开 “灭火.dat”文件,再打开“学生机
器人”的电源,将程序写入“学生 机器人”。
(3)能否让机器人在找到火源 时,发出报警声呢?
(4)当蜡烛变短时,哪些参数 会发生变化?
(5)如果机器人不能停止在蜡 烛前的白线上,应如何改变程序参 数呢?
(6)除了用电扇吹,还有其他 办法能让机器人完成灭火任务吗?
第六节 机器人灭火
第六节机器人灭火火灾发生时,消防队员都会不顾一切地跃身火海救人,但他们的生命安全令人担心,如何保证人们安全、使火灾的损失减少到最低程度?我们设想让机器人在公共安全领域发挥他的重要作用。
机器人走入楼房,传感器敏捷地探测到火源,警报器闪耀,找到火源,使灭火剂对准火源,将火扑灭。
这样的情形肯定在不久的将来会变成现实。
今天我们就来设计一个机器人,让它在一个模拟的房间里完成灭火的任务。
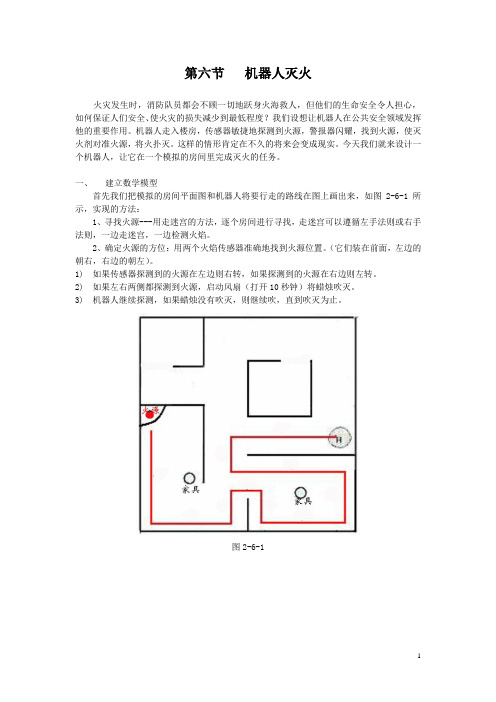
一、建立数学模型首先我们把模拟的房间平面图和机器人将要行走的路线在图上画出来,如图2-6-1所示,实现的方法:1、寻找火源---用走迷宫的方法,逐个房间进行寻找,走迷宫可以遵循左手法则或右手法则,一边走迷宫,一边检测火焰。
2、确定火源的方位:用两个火焰传感器准确地找到火源位置。
(它们装在前面,左边的朝右,右边的朝左)。
1)如果传感器探测到的火源在左边则右转,如果探测到的火源在右边则左转。
2)如果左右两侧都探测到火源,启动风扇(打开10秒钟)将蜡烛吹灭。
3)机器人继续探测,如果蜡烛没有吹灭,则继续吹,直到吹灭为止。
图2-6-1二、画流程图迷宫部分参考流程图2-6-3图2-6-2 机器人灭火流程图N NYN YN YY右转打开风扇10左或右两侧是否有光关闭风扇结束 左转开始 左右两侧都探测到光源 右侧探测到光源左侧探测到光迷宫 否否是 前进是前方有障碍左侧有障碍左转90度右转90度三、项目实施这个项目比较复杂,因此需要分步去实施,特别是程序编好后的调试更是如此。
准备与实施的项目准备与实施的内容备注硬件(1)使用的测障传感器名称,数量:,类型:(数字或模拟)(2)使用的检测火源的传感器名称,数量:,类型:(数字或模拟)检测左方障碍的传感器所接端口号:,检测前方障碍的传感器所接端口号:,检测火焰的传感器所接的端口号: 。
测障传感器检测到障碍时的值是,火焰传感器检测火焰时的值是。
(3)灭火装置:程序启动风扇命令:调试:一“机器人走迷宫”可以按以下步骤去做:1、看机器人沿着墙壁能否不碰墙前进。
机器人灭火——迷宫灭火

灭火
走迷宫
结束
开始
循环开始
机 器 人 灭 火 流 程 图
是否发现火焰
Y 停止前进 打开风扇
N
前进 等待灭火 关闭风扇 循环开始
结束
任务二
小组讨论,设计出流程图 。
开始
机 器 人 迷 宫 灭 火 流 程 图
循环开始
N N 左边有无障碍 Y 等待灭火 关闭风扇 循环开始 右转 前进 左转 N
是否发现火焰
Y 停止前进 打开风扇
第13课 机器人灭火——迷宫灭火
七中育才学校三圣分校 李欢
灭火场景
灭火机器人
障碍物
火源
任务一
1、奇数小组设计走迷宫流程图, 偶数小组设计寻火焰流程图; 2、奇数小组编写寻火焰程序, 偶数小组编写走迷宫程序。机器人走迷宫流来自图开始循环开始
前方有无障碍
N 左边有无障碍 Y N
Y
右转
前进
左转
循环开始
迷宫灭火程序
while 1 if checkmonocular(3)>=30 and checklight(1)>37 then motorbrake(A) motorbrake(B) motorforward(C,100) wait(1) motorbrake(C) else if checktouch(1)==1 then motorforward(A,50) motorforward(B,50) else if checkultrasound(2)<20 then motorforward(B,50) motorforward(A,50) else motorforward(A,25) motorbackward(B,50) end if end if end if end
实践项目6:灭火机器人的制作.21页PPT

❖ 知识就是财富 ❖ 丰富你的人生
71、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 75、内外相应,言行相称。——韩非
13、遵守纪律的风气的培养,只有领 导者本 身在这 方面以 身作则 才能收 到成效 。—— 马卡连 柯 14、劳动者的组织性、纪律性、坚毅 精神以 及同全 世界劳 动者的 团结一 致,是 取得最 后胜利 的保证 。—— 列宁 摘自名言网
15、机会是不Leabharlann 纪律的。——雨果谢谢你的阅读
实践项目6:灭火机器人的制 作.
11、战争满足了,或曾经满足过人的 好斗的 本能, 但它同 时还满 足了人 对掠夺 ,破坏 以及残 酷的纪 律和专 制力的 欲望。 ——查·埃利奥 特 12、不应把纪律仅仅看成教育的手段 。纪律 是教育 过程的 结果, 首先是 学生集 体表现 在一切 生活领 域—— 生产、 日常生 活、学 校、文 化等领 域中努 力的结 果。— —马卡 连柯(名 言网)
消防队员——机器人灭火比赛_课件
学习目标
通过熟悉比赛规则、阅读范例 程序,了解比赛过程,熟练掌握能 力风暴机器人各种功能的使用方法, 加深学习智能机器人的兴趣,满了 竞争与挑战的社会,要在竞 争与挑战中获胜,就要熟悉 竞争的规则,并且学会恰当 地利用规则。
任务1 分析范例程序
2.对于参赛选手,参赛策 略尤为关键,它决定着程序采 用何种算法更为合理,直接影 响着比赛的成绩。
3.由于比赛环境中存在 许多偶然因素,因此编制程 序时应尽可能考虑周到细致。
各显神通
根据学校实际情况,修 订比赛规则,自己动手制作 机器人比赛场地,设计比赛 成绩记录表,分组实施比赛。
谢谢
任务要求:阅读系统自 带的灭火程序。
一起做
①打开“标准场地灭火示例”,查看程 序中各子程序及模块参数。 ②在小组内讨论,说说程序执行过程。 ③在“标准灭火场地”中试运行,观看 运行效果。
试一试
适当调整程序部分模块 的参数,使机器人更顺利地 完成任务分析“沿墙走灭火 示例”,比较两程序的区别, 分析不同程序设计方法的利 弊。
任务2 制定比赛规则
任务要求:根据实际条件,制定 自己的比赛规则。
规则对任何比赛来讲都是至关重 要的,只有熟悉了规则,才能有针对 性地制定比赛策略,继而采用适当的 技术和战术,取得良好的成绩。
小结
1.任何比赛,规则的制 定都是至关重要的,它体现 了竞赛的导向,决定着比赛 成绩是否能反映选手的真实 水平。
仿真灭火机器人教程
启动、停顿电机
发音
• 1) 功能:“发音〞模块主要用于让机器人发音,唱一个音符。 • (2) 操作:用鼠标将“发音〞模块移到流程图生成区并连接在程序中
。右击“发音〞模块,在弹出的对话框中选择音阶和节拍,也可直接 输入音频与发声时间参数。 • (3)设置参数说明: • 时间:在对话框中输入机器人发音的持续时间,单位为秒。也可直接 选择节拍,如二分之一音符发音0.5秒,四分之一音符发音0.25秒, 以此类推。 • 音频设置:音频对应于机器人唱的音阶,单位为赫兹。 • 1,2,3等代表简谱音阶。 • 休止符,表示不发声〔静音〕,也须指定时间间隔。 • 自定义,可在对话框中输入任意音频数值,使机器人发出相应频率的 声音。
变量,左键单击该按钮,可在弹出的变量百宝箱中选择其它两个变量 ,“红外变量二〞和“红外变量三〞。 • Ø 带判断功能的模块 • ①“红外变量一〞:功能同上。 • ②条件判断表达式:左边的红外变量与右边的参数进展比较。 • 例:“红外变量一 == 左〞代表如果检测到障碍在左边,条件判断成 功,执行“是〞下面的模块;如果检测到其他任何情况,条件判断失 败,执行“否〞下面的模块。 • 例:“红外变量二 != 无〞代表如果检测到有障碍物〔无论在左边、 在右边还是在前面〕,条件判断成功,执行“是〞下面的模块;如果 检测不到障碍物,条件判断失败,执行“否〞下面的模块。
• 显示信息设置:在对话框中直接输入要显示的英 文信息。可以显示两行信息,每行最多16个字符 。
显示
设置眼睛
• ⑴ 功能:模块主要用于设置机器人眼睛的颜色和 状态,如:红、绿、黄、闪烁或者熄灭。
• ⑵ 操作:用鼠标将“设置眼睛〞模块移到流程图 生成区,并连接在程序中。右击“设置眼睛〞模块 ,在弹出的对话框中按你的想法设置机器人的眼 睛。
第3单元第15课 机器人灭火 ppt(24张PPT)
路线由一条黑线表示,因此,机器人需要具有循迹能力并在 建筑物中寻找火源,需要机器人能避障行走。
新知讲解
完成灭火任务的具体思路如下:
(1)从起点出发,沿黑线走到建筑群。
(2)利用走迷宫的方法在 建筑群中避障行走寻找火 源,当检测到火源后机器 人停止前进。
(3)启动电机灭火。
新知讲解
根据问题分 析,设计机器 人灭火流程图 如图所示。
消防机器人代替消防救援人员 进入现场进行数据采集、火灾处 理、信息反馈,能有效解决消防 人员面临的人身安全、数据信息 采集不足等问题(如图所示)。
新知讲解
设计一个灭火机器人,以如图所示的场景为例, 编程控制机器人完成灭火任务。
新知讲解
日积月累
火焰传感器是机器人专门用来搜寻火源的传感 器,它能检测到火焰发出的波长在700~1000纳 米范围内的红外线。
二、设计流程图
新知讲解
知识链接
子程序 设计程序时,可以把功能相同的程 序段单独编写成子程序,根据需要,主程序在 执行过程中可以反复调用子程序,子程序执行 结束后又能返回到主程序,继续执行后面的程 序段。
新知讲解
三、项目实施
根据上述分析,结合下表准备机器人硬件、 准备活动场地、编写程序、调试机器人,完成 循迹、走迷宫和灭火任务。
作业布置
1.根据所学知识设计一 个踢足球的足球机器人。
新知讲解 机器人搭建 实施内容
实施项目
1.配件:主机1个,马达2个,随动轮1 个,灭火电机1个,小风扇。
2.左电机的端口号:( )右电机的 端口号:( )风扇电机的端口号: ()
3.Байду номын сангаас度传感器2个,左边传感器的端 口:( )右边传感器的端口:( )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
灭火竞赛规则
运行模式
标准运行 :系数 1.0 声音启动 :系数 0.9,自备发音器 回家模式 :2 min, 系数 0.8 搜救模式 :1 min, 系数 0.6
房间系数
搜索1个房间,系数 1.0 搜索2个房间,系数 0.85 搜索3个房间,系数 0.50 搜索4个房间,系数 0.35
13
红外接受扩展卡
14
PSD红外测距卡
15
PSD红外测距卡
16
数字指南针
17
多功能卡
18
多功能卡编程环境
19
伺服电机驱动卡
20
救援夹持装置
21
救援夹持装置
22
改装实例
23
改装实例
24
改装实例
25
改装实例
26
灭火策略
随机走 固定路线走 左/右手规则:
红外接收扩展 PSD传感器扩展 指南针扩展
27
回家策略
记住房间+规划路径
地面灰度检测扩展
PSD传感器方式 红外接收扩展卡
左右手交替
28
救援策略
寻找救援目标 拾起救援目标
双面海绵胶(不增加特别机械装置) 机械夹持装置 伺服电机解决方案
29
3
灭火竞赛规则
可靠性
三次成功,可靠性系数 0.9 两次成功,可靠性系数 1.0
4
灭火场地
5
灭火机器人要求
巡查
避免碰撞墙壁,遍历各房间
发现火
高度: 15 cm / 2~3 cm
发现地面白圈/门槛/出发点
进入30cm半径白圈
扑灭火
6
灭火机器人设计
巡查
碰撞传感器 红外测障
机器人灭火项目
上海广茂达伙伴机器人有限公司
1
灭火竞赛规则
场地 场地照明 :室内冷光源 机器人 :不限 蜡烛 :15~20 + 7x7x3 家具 :R6 x 30 cm , 3kg 得分=实际时间×启动模式系数×房间系数×搜救
系数×回家系数。 成绩:三轮比赛,发现地面白圈/门槛/出发点
地面灰度检测
扑灭火
灭火风扇装置
7
远红外火焰探测器及扩展卡
8
地面灰度检测卡
9
双卡的叠加
切 断 此 线 , 改 接 PE7
10
灭火风扇装置
11
高级扩展配件
红外接收扩展卡 PSD红外测距传感器 数字指南针 多功能扩展卡
12
红外接收扩展卡