STM32的串口配置(中断方式)
关于STM32串口空闲中断IDEL的问题

关于STM32串口空闲中断IDEL的问题1.空闲中断是接受数据后出现一个byte 的高电平(空闲)状态,就会触发空闲中断.并不是空闲就会一直中断,准确的说应该是上升沿(停止位)后一个byte,如果一直是低电平是不会触发空闲中断的(会触发break 中断)。
2.关于第二点有要铺垫的三个情况,datasheet 中”当一空闲帧被检测到时,其处理步骤和接收到普通数据帧一样,但如果IDLEIE 位被设置将产生一个中断”“空闲符号被视为完全由'1'组成的一个完整的数据帧,后面跟着包含了数据的下一帧的开始位'1'的位数也包括了停止位的位数”空闲符号的配图后面跟这一个低电平.有人理解为只有收到下一个数据的起始位才会触发中断,这样理解是不对的,应该是数据后有空闲了一帧就会触发.3.清中断的方式感觉奇怪,使用函数USART_ClearITPendingBit( USART1,USART_IT_IDLE )清除不了中断的.我用的是3.5 的库,查看函数说明,里面的@param 参数并没有IDLE,后面的@note 中,这样说:”PE(Parity error),FE(Framingerror),NE(Noise error),ORE(OverRun error) and IDLE(Idle line detected) pendingbits are cleared by software sequence: a read operation to USART_SR register(USART_GetITStatus()) followed by a read operation to USART_DR register(USART_ReceiveData()).”我是通过语句”USART1->DR;”来清除IDLE 中断的.现在有很多数据处理都要用到不定长数据,而单片机串口的RXNE 中断一次只能接收一个字节的数据,没有缓冲区,无法接收一帧多个数据,现提供两种利用串口IDLE 空闲中断的方式接收一帧数据,方法如下:方法1:实现思路:采用STM32F103 的串口1,并配置成空闲中断IDLE 模式且使能DMA 接收,并同时设置接收缓冲区和初始化DMA。
stm32cubemx 串口中断和回调函数运行机制
stm32cubemx 串口中断和回调函数运行机制在STM32CubeMX 中配置串口中断和回调函数的运行机制涉及到STM32 微控制器的中断系统和HAL 库的使用。
下面是一个简要的概述:1. 配置串口硬件:首先,在STM32CubeMX 中,你需要配置串口硬件,选择串口的引脚、波特率等参数。
在配置过程中,你还可以选择是否启用串口的中断。
2. 生成代码:完成硬件配置后,通过STM32CubeMX 生成初始化代码。
这将生成包含初始化串口的HAL 库函数调用的 C 代码文件。
3. 中断配置:如果启用了串口中断,STM32CubeMX 将生成相应的中断处理函数的框架,但并不会直接实现中断处理的代码。
在生成的代码中,你会看到像`USARTx_IRQHandler` 这样的中断处理函数,其中`x` 是你所配置的串口号。
你需要在这个函数中实现具体的中断处理逻辑。
4. HAL_UART_IRQHandler 函数:在中断处理函数中,通常会调用HAL 库的相应函数,如`HAL_UART_IRQHandler`。
这个函数实际上是一个通用的串口中断处理函数,它会检查串口中断的原因并调用相应的回调函数。
5. 回调函数:在HAL 库中,你可以注册一个回调函数,该函数将在串口中断发生时被调用。
回调函数的注册通常在初始化串口时完成,使用的函数是`HAL_UART_Receive_IT` 或`HAL_UART_Transmit_IT`。
这两个函数中的`_IT` 表示启用中断。
以下是一个伪代码示例,演示了串口中断和回调函数的配置:```c// 串口接收缓冲区uint8_t rxBuffer[BufferSize];// 串口中断回调函数void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {// 处理接收完成中断// 处理完后重新启动接收HAL_UART_Receive_IT(&huart1, rxBuffer, BufferSize);}int main() {// STM32CubeMX 生成的初始化代码// 启动串口接收中断HAL_UART_Receive_IT(&huart1, rxBuffer, BufferSize);while (1) {// 主循环}}```在这个例子中,`HAL_UART_RxCpltCallback` 函数是串口接收完成中断的回调函数。
STM32串口配置步骤
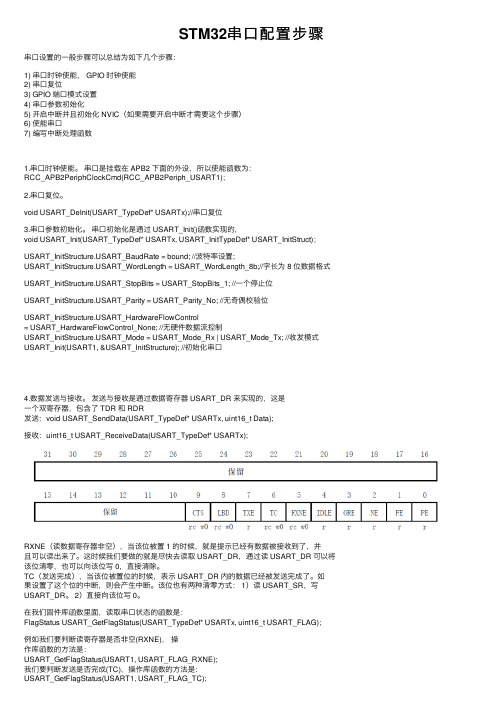
STM32串⼝配置步骤串⼝设置的⼀般步骤可以总结为如下⼏个步骤:1) 串⼝时钟使能, GPIO 时钟使能2) 串⼝复位3) GPIO 端⼝模式设置4) 串⼝参数初始化5) 开启中断并且初始化 NVIC(如果需要开启中断才需要这个步骤)6) 使能串⼝7) 编写中断处理函数1.串⼝时钟使能。
串⼝是挂载在 APB2 下⾯的外设,所以使能函数为:RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1);2.串⼝复位。
void USART_DeInit(USART_TypeDef* USARTx);//串⼝复位3.串⼝参数初始化。
串⼝初始化是通过 USART_Init()函数实现的,void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);USART_ART_BaudRate = bound; //波特率设置;USART_ART_WordLength = USART_WordLength_8b;//字长为 8 位数据格式USART_ART_StopBits = USART_StopBits_1; //⼀个停⽌位USART_ART_Parity = USART_Parity_No; //⽆奇偶校验位USART_ART_HardwareFlowControl= USART_HardwareFlowControl_None; //⽆硬件数据流控制USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串⼝4.数据发送与接收。
发送与接收是通过数据寄存器 USART_DR 来实现的,这是⼀个双寄存器,包含了 TDR 和 RDR发送:void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);接收:uint16_t USART_ReceiveData(USART_TypeDef* USARTx);RXNE(读数据寄存器⾮空),当该位被置 1 的时候,就是提⽰已经有数据被接收到了,并且可以读出来了。
stm32多任务多数据串口接收及处理方法
stm32多任务多数据串口接收及处理方法STM32多任务多数据串口接收及处理方法通常涉及到使用中断服务程序(ISR)或轮询方法来接收串口数据,并在多个任务之间分配和同步处理这些数据。
以下是一个基本的步骤和策略,用于实现这一功能:1. 初始化串口:首先,你需要初始化串口以进行通信。
这包括设置波特率、数据位、停止位、奇偶校验等。
2. 配置中断:STM32的串口通常具有一个接收中断。
你可以配置这个中断,以便每当一个新的字节被接收时,它就会触发一个中断。
3. 中断服务程序(ISR):在中断服务程序中,你可以读取接收缓冲区中的数据,并将其放入一个全局变量或数据结构中,以便其他任务或函数可以访问它。
4. 多任务处理:你可以使用一个任务或一组任务来处理这些串口数据。
这可能涉及到解析数据、执行某些操作或将数据发送到其他设备。
5. 数据同步:在多任务环境中,你需要确保数据的同步。
这意味着,当一个任务正在处理数据时,其他任务不能同时访问或修改这些数据。
这通常通过使用互斥锁、条件变量或其他同步机制来实现。
6. 轮询:除了使用中断,你还可以使用轮询方法来检查串口是否有数据可供读取。
这种方法可能在某些应用中更简单,但可能不如中断方法效率高。
7. 错误处理:不要忘记在代码中包含错误处理逻辑。
这可能包括检查读取的数据是否完整、是否有任何传输错误等。
8. 优化:对于高性能应用,你可能还需要考虑其他优化策略,如非阻塞读取、缓冲区管理、流量控制等。
以上只是一个基本的框架,具体的实现细节将取决于你的具体需求和STM32的具体型号。
建议查阅STM32的参考手册和相关文档以获取更详细的信息和示例代码。
奋斗STM32开发板串口1中断例程详解及实验手册
淘宝店铺:
8
奋斗版 STM32 开发板例程详解———串口 1 中断实验
应答起始位。发送和接收由一共用的波特率发生器驱动,当发送器和接收器的使能位分别置 位时,分别为其产生时钟。每个功能块的详细资料如下给出。 图2 字长设置
单字节通信
清零TXE 位总是通过对数据寄存器的写操作来完成的。TXE 位由硬件来设置,它表明: ● 数据已经从TDR 移送到移位寄存器,数据发送已经开始 ● TDR 寄存器被清空 ● 下一个数据可以被写进USART_DR 寄存器而不会覆盖先前的数据如果TXEIE 位被设置,此 标志将产生一个中断。如果此时USART 正在发送数据,对USART_DR 寄存器的写操作把数据 存进TDR 寄存器,并在当前传输结束时把该数据复制进移位寄存器。如果此时USART 没有在 发送数据,处于空闲状态,对USART_DR 寄存器的写操作直接把数据放进移位寄存器,数据 传输开始,TXE 位立即被置起。当一帧发送完成时(停止位发送后),TC 位被置起,并且 如果USART_CR1 寄存器中的TCIE 位被置起时,中断产生。先读一下USART_SR 寄存器,再写 一下USART_DR 寄存器,可以完成对TC 位的清零。 注意: TC 位也可以通过对它软件写0 来清除。此清零方式只在多缓冲器通信模式 下推荐使用。
断开符号
淘宝店铺:
10
奋斗版 STM32 开发板例程详解———串口 1 中断实验
置位SBK位可发送一个断开符号。断开帧长度取决M位(见图166)。如果SBK位被置1,在完成 当前数据发送后,将在TX线上发送一个断开符号。断开字符发送完成时(在断开符号的停止 位时)SBK被硬件复位。USART在最后一个断开帧的结束处插入一逻辑1 位,以保证能识别下 一帧的起始位。 注意:如果在开始发送断开帧之前,软件又复位了SBK 位,断开符号将不被发送。如果要发 送两个连续的断开帧,SBK 位应该在前一个断开符号的停止位之后置起。
STM32串口教程

STM32串口教程STM32是一种基于ARM Cortex-M内核的32位微控制器系列。
它具有强大的处理能力和丰富的外设接口,适用于各种嵌入式应用。
其中,串口通信是STM32常用的外设之一,可以用于和其他设备进行数据的收发。
本文将介绍STM32串口的配置和使用方法。
一、串口的基本原理串口是一种以串行方式传输数据的通信方式。
在串口通信中,数据按照比特位的顺序传输,一次传输一个位。
数据的传输包括一个或多个字节,每个字节由8位组成,其中包括1位起始位、1位停止位和可选的奇偶校验位。
串口通信需要两根信号线,一根用于发送数据(TX),一根用于接收数据(RX)。
二、STM32串口的配置配置串口的步骤如下:1.设置GPIO引脚功能和模式:将串口的引脚配置为复用功能,并设置引脚的模式为推挽输出。
2.使能串口时钟:根据串口的编号,使能对应串口的时钟。
3.配置串口参数:设置串口的波特率、数据位、停止位、奇偶校验位等参数。
4.使能串口:使能串口的发送和接收功能。
三、STM32串口的使用方法配置完成后,即可使用STM32的串口进行数据的收发。
下面是使用STM32串口的一般流程:1.发送数据:将要发送的数据写入到串口的发送缓冲区,等待数据发送完成。
2.接收数据:检测是否有数据接收到,如果有则读取数据。
在发送数据时,可以使用printf函数实现方便的格式化输出。
为了使用printf函数,需要先配置printf函数的底层接口。
可以使用标准库提供的函数重定向方法,将输出重定向到串口。
在接收数据时,可以使用中断方式或轮询方式。
中断方式需要配置串口的中断,并在中断服务函数中处理接收到的数据。
轮询方式是在主循环中不断检测数据是否接收到,并进行读取。
四、常见问题及解决方法1.串口通信乱码问题:可能是波特率设置不正确导致的,可以检查波特率设置是否和目标设备匹配。
2.串口接收数据丢失问题:可能是接收缓冲区溢出导致的,可以增加接收缓冲区的大小或者使用中断方式处理接收数据。
STM32串口通信学习总结
STM32串口通信学习总结STM32是STMicroelectronics推出的一款32位单片机系列,具有高性能、低功耗、丰富的外设等特点,广泛应用于工业控制、消费电子、汽车电子等领域。
其中,串口通信是单片机中常用的通信方式之一,本文将对STM32串口通信学习进行总结。
1.串口通信原理及基础知识在STM32中,USART(通用同步/异步收发器)是负责串口通信的外设。
USART提供了多种模式的串口通信,包括异步模式(Asynchronous)、同步模式(Synchronous)以及单线模式(Single-wire)等。
2.STM32串口通信配置步骤(1)GPIO配置:首先需要配置串口通信所涉及的GPIO引脚,通常需要配置为复用功能,使其具备USART功能。
(2)USART配置:根据需要选择USART1、USART2、USART3等串口进行配置,设置通信模式、波特率等参数。
在配置时需要注意与外部设备的通信标准和参数保持一致。
(3)中断配置(可选):可以选择中断方式来实现串口数据的收发。
通过配置中断,当接收到数据时会触发中断,从而实现接收数据的功能。
(4)发送数据:通过USART的发送寄存器将数据发送出去,可以通过查询方式或者中断方式进行发送。
(5)接收数据:通过读取USART的接收寄存器,获取接收到的数据。
同样可以通过查询方式或者中断方式进行接收。
3.常见问题及解决方法(1)波特率设置错误:在进行串口通信时,波特率设置错误可能会导致通信失败。
需要根据外设的要求,选择适当的波特率设置,并在STM32中进行配置。
(2)数据丢失:在高速通信或大量数据传输时,由于接收速度跟不上发送速度,可能会导致数据丢失。
可以通过增加接收缓冲区大小、优化接收中断处理等方式来解决该问题。
(3)数据帧错误:在数据传输过程中,可能发生数据位错误、校验错误等问题。
可以通过对USART的配置进行检查,包括校验位、停止位、数据位等的设置是否正确。
STM32串口之空闲中断

STM32串⼝之空闲中断NBiot模块⼀般都是串⼝接⼝,使⽤AT指令集,对接中国移动onenet平台。
先⽤串⼝助⼿去测试,流程测试OK之后需要在MCU上重新写⼀遍。
STM32串⼝ IDLE中断IDLE其实是空闲的意思。
IDLE中断叫空闲中断,不叫帧中断。
那么什么叫空闲,怎么定义空闲呢?在实际发送数据的时候,⽐如⼀串字符串,我们会采⽤如下⽅式发送void uart1_putc(char dat){SBUF = dat;while (!TI);TI = 0;}void uart1_puts_n(char *str){while (*str)uart1_putc(*str++);}void uart1_puts_n("i am handsome");其实发送的两个字符之间间隔⾮常短,所以在两个字符之间不叫空闲。
空闲的定义是总线上在⼀个字节的时间内没有再接收到数据,空闲中断是检测到有数据被接收后,总线上在⼀个字节的时间内没有再接收到数据的时候发⽣的。
⽽总线在什么情况时,会有⼀个字节时间内没有接收到数据呢?⼀般就只有⼀个数据帧发送完成的情况,所以串⼝的空闲中断也叫帧中断。
要怎么开启帧中断呢?其实其他串⼝配置不⽤改变,只需要在开启串⼝接收中断的时候加上⼀句话就Ok。
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串⼝接收中断USART_ITConfig(USART2, USART_IT_IDLE, ENABLE);//开启串⼝空闲中断然后中断函数如下void USART2_IRQHandler(void){ //串⼝1中断服务程序int clear;if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){ //字符接收中断(接收到的数据必须是0x0d 0x0a结尾)USART2_RX_BUF[length++] = USART2->DR & 0x0FF;}else if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){//空闲帧中断if(USART2_RX_BUF[length - 1] == 0xff){clear = USART2->DR;clear = USART2->SR;length = clear;length = 0;USART2_RX_STA = 1;}else{;}}}在普通中断的时候仅仅保存数据,在帧中断的时候需要执⾏相应处理函数。
STM32-实现串口中断接收和发送数据

STM32-实现串⼝中断接收和发送数据⼀、⼯具 1、硬件:STM32L053R8单⽚机(HAL库) 2、编译环境:Atollic TrueSTUDIO for STM32 9.3.0 3、辅助⼯具:STM32CubeMX⼆、单⽚机系统时钟配置 1、系统时钟配置(没有显⽰的默认),这⾥选择的是内部的⾼速时钟(HSI)作为时钟源,系统时钟频率配置到24MHz。
三、串⼝配置 1、选⽤的是串⼝1,模式是异步通讯,波特率为38400,数据位长度为8,⽆校验位,⼀个停⽌位,接收和发送都打开,其它默认。
2、使能串⼝中断四、⽣成⼯程并进⾏完善 1、⼯程⽣成设置 2、完善代码 在配置完串⼝后,要以中断的⽅式接收数据,后⾯新增的接收⼀个字节数据函数主要是为了打开串⼝中断并等待有数据发来,剩下的字节由中断的回调函数控制接收。
/*** @brief USART1 Initialization Function* @param None* @retval None*/static void MX_USART1_UART_Init(void){/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 38400 ;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 */HAL_UART_Receive_IT(&huart1, &r_data, 1);/* USER CODE END USART1_Init 2 */} 当有数据发来,会响应中断接收数据,接收完后会关闭中断然后调⽤⼀个回调函数,如果想接收多个数据,就需要在回调函数中重新开启接收中断,回调函数的内容可以由⽤户⾃⼰添加(该函数名为固定写法不能随意更改)。
stm32串口中断原理

stm32串口中断原理
STM32串口中断是指在串口收发数据时,通过中断方式进行
数据的处理和传输。
在STM32单片机中,串口通信是通过UART或USART模块实现的。
UART(Universal Asynchronous Receiver/Transmitter)是一种
通用异步收发器,主要用于串行通信。
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)是一个更加
通用且功能更强大的串行通信接口,可同时支持异步和同步通信。
在STM32中,串口通信一般使用USART模块。
通过配置USART的寄存器,设置波特率、数据位、停止位、校验位等
参数。
然后,通过使能USART接收中断和发送中断,可以实
现接收和发送数据时的中断处理。
当有新的数据要发送时,CPU会将数据写入USART的发送缓冲区,并启动发送操作。
当发送操作完成后,USART会触发
发送完成中断,通知CPU可以继续发送下一个数据。
当收到新的数据时,USART会将数据存入接收缓冲区,并触
发接收完成中断,通知CPU可以读取接收到的数据。
在中断服务函数中,我们可以根据需要处理发送和接收的数据。
比如,可以通过发送中断函数来发送下一个数据,或者在接收中断函数中进行数据的处理和分析。
总的来说,STM32串口中断通过配置USART的相关寄存器和使能中断,实现了在数据收发过程中的中断处理。
这种方式可以提高效率和可靠性,使程序可以及时响应串口数据的变化。
STM32串口1中断实验

串口1中断实验一、实验要求开发板加电后,先向串口输出一串测试数据,然后在PC端的串口助手类软件上输入结束符为0x0d 0x0a的一串数据,发送到开发板,开发板接收到该字符串后将该字串回传给PC端串口助手软件,传送和接收过程中LED灯闪烁。
二、硬件电路设计如下图所示,只需要将开发板配套的RS232串口线连接开发板9针串口到PC的串口上,如果电脑上没有串口,可以用USB转串口设备取代标准串口。
三、软件设计思路根据任务要求,程序内容主要包括:1. 初始化串口1,使能串口接收中断,通过串口输出相关信息到PC2. 通过串口中断服务程序检测串口输入信息3. 将收到的字符发送回PC,然后回到步骤2继续等待四、程序分析1.工程结构:整个工程包含4类源文件,把它们安排在4个组当中:1)RVMDK组:仅包含一个启动用汇编源文件startup_stm32f10x_hd.s 。
由于奋斗板采用STM32F103大存储器芯片(512k片上FLASH),因此采用STM32标准库中自带的大存储器芯片启动代码.这个文件已经配置好了初始状态,以及中断向量表,可以直接在工程里使用。
如果你在以后的应用中采用了中存储器或者小存储器的STM32芯片,可以将启动代码替换为startup_stm32f10x_md.s (中容量)或者startup_stm32f10x_ld.s(小容量)。
2)StdPeriph_Driver组:stm32f10x_gpio.c:ST公司的标准库,包含了关于对通用IO口设置的函数。
stm32f10x_rcc.c :ST公司的标准库,包含了关于对系统时钟设置的函数。
stm32f10x_USART.c:ST公司的标准库,包含了关于对USART设置的函数。
Misc.c:ST公司的标准库,包含了关于中断设置的函数。
3)CMSYS组:是关于整个Cortex-M3平台的系统函数及定义,由ARM公司给出。
4)USER组:main.c:例程的主函数。
使用STM32CubeMX实现中断模式下的串口收发

单击 UART 按钮弹出设置窗口。
Baud Rate :波特率:此后生成的初始化程序会对波特率和 APB 总线频率进行自动换算。 Word Length:字长
Parity:校验位 Stop Bits:停止位 Data Direction:设置发送接收模式 Over Sampling:对接收信号的采样倍率。如果软件模拟串口一般 3 次采样/位就够了,这里 默认即可。
C)串口接收的实现方法 在 main.c 的 while(1)前执行
if(HAL_UART_Receive_IT(&huart5,aRxBuffer,1)!=HAL_OK)Error_Handler();开启接收中 断,准备接收。
在 main.c 中重写串口接收回调函数如下: void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle) {
Uart5Ready_R = SET; Rx_Num_UART5 = ++Rx_count_UART5; Rx_count_UART5 = 0; } else Rx_count_UART5++; HAL_UART_Receive_IT(&huart5,aRxBuffer,1); //开启下一次接收中断 } } 在此回调函数中,每次接收到的字节 aRxBuffer[0]都会存入 Rxbuff[ ] ,Rx_count_UART5 自动加 1。结束字节为 0x0D 0x0A。一组字节接收结束后,Uart5Ready_R 将赋值为 SET, 接收字节数保存在 Rx_Num_UART5。 因为在调用 HAL_UART_IRQHandler(&huart5);时,调用了 UART_Receive_IT(),其中 执行了 __HAL_UART_DISABLE_IT(huart, UART_IT_RXNE),所以接收中断必须在回调函 数中重新开启,最简单的就是重复调用 HAL_UART_Receive_IT(&huart5,aRxBuffer,1)了。
STM32使用DMA加串口空闲中断接收数据

STM32使用DMA加串口空闲中断接收数据在STM32中使用DMA和串口空闲中断接收数据可以实现高效的数据接收。
下面是一个示例代码,可以在1200字以上使用DMA和空闲中断接收数据。
首先,需要启用STM32的串口空闲中断和DMA功能。
在CubeMX中配置相关的引脚和串口设置,并使能空闲中断和DMA接收。
接下来是代码实现:```c#include "stm32f4xx_hal.h"#define UART_RX_BUFFER_SIZE 2048 // 接收缓冲区大小UART_HandleTypeDef huart2;DMA_HandleTypeDef hdma_usart2_rx;uint8_t uart_rx_buffer[UART_RX_BUFFER_SIZE];uint16_t uart_rx_index = 0;```上面的代码定义了串口接收的缓冲区和相关的变量。
```cvoid HAL_UART_IdleCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//空闲中断发生HAL_UART_DMAStop(&huart2);}```这是串口空闲中断回调函数,当串口空闲中断发生时,将设置一个标志表示接收完成,并停止DMA接收。
```cvoid HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)if (huart->Instance == USART2)//DMA接收完成uart_rx_index += UART_RX_BUFFER_SIZE -hdma_usart2_rx.Instance->CNDTR;if (uart_rx_index >= UART_RX_BUFFER_SIZE)//接收缓冲区满了,重置索引uart_rx_index = 0;}HAL_UART_Receive_DMA(&huart2, uart_rx_buffer,UART_RX_BUFFER_SIZE);}```这是DMA接收完成回调函数,当DMA接收完成时,更新接收缓冲区索引,并重新启动DMA接收。
STM32串口接收流程-串口接收中断

STM32串⼝接收流程-串⼝接收中断串⼝接收串⼝接收流程1. 编程USARTx_CR1的M位来定义字长。
2. 编程USARTx_CR2的STOP位来定义停⽌位位数。
3. 编程USARTx_BRR寄存器确定波特率。
4. 使能USARTx_CR1的UE位使能USARTx。
5. 如果进⾏多缓冲通信,配置USARTx_CR3的DMA使能(DMAT)。
6. 使能USARTx_CR1的RE位为1使能接收器。
7. 如果要使能接收中断(接收到数据后产⽣中断),使能USARTx_CR1的RXNEIE位为1。
当串⼝接收到数据时1. USARTx_SR(ISR)的RXNE位置1。
表明移位寄存器内容已经传输到RDR(DR)寄存器。
已经接收到数据并且等待读取。
2. 如果开启了接收数据中断(USARTx_CR1寄存器的RXNEIE位为1),则会产⽣中断。
(程序上会执⾏中断服务函数)3. 如果开启了其他中断(帧错误等),相应标志位会置1。
4. 读取USARTx_RDR(DR)寄存器的值,该操作会⾃动将RXNE位清零,等待下次接收后置位。
串⼝接收流程(HAL库)配置过程:接收配置步骤①~⑥和发送流程⼀样,调⽤HAL_UART_Init函数HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart);步骤⑦开启接收中断:HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef*huart, uint8_t *pData, uint16_t Size);接收数据过程:步骤①获取状态标志位通过标识符实现:__HAL_UART_GET_FLAG //判断状态标志位__HAL_UART_GET_IT_SOURCE //判断中断标志位步骤②~③中断服务函数:void USARTx_IRQHandler(void) ;//(x=1~3,6)void UARTx_IRQHandler(void) ;//(x=4,5,7,8)在启动⽂件startup_stm32fxxx.s中查找。
STM32串口中断接受数据教程

STM32串口中断接受数据教程在STM32系列微控制器中,使用串口接收数据可以通过中断方式实现,这种方式对于实时性要求较高的应用非常有用。
本教程将介绍如何在STM32中配置串口接收中断,并编写相应的中断服务程序来处理接收到的数据。
首先,我们需要初始化串口硬件和中断。
在STM32CubeIDE中,可以使用CubeMX来生成初始化代码。
在"Pinout & Configuration"选项卡中,选择所需的串口引脚,并设置相应的参数(如波特率、数据位、停止位等)。
然后,在"Configuration"选项卡中,启用串口的中断功能。
接下来,需要在代码中创建串口接收中断的回调函数。
在CubeMX生成的代码中,可以找到一个名为"USARTx_IRQHandler"的函数,其中"x"是串口的编号。
在这个函数中,可以添加处理接收数据的代码。
在回调函数中,可以使用HAL库提供的函数来判断是否接收到了新的数据。
例如,可以使用"__HAL_UART_GET_FLAG"函数来检查接收寄存器非空标志位,并使用"__HAL_UART_CLEAR_FLAG"函数清除该标志位。
然后,可以使用"__HAL_UART_GET_IT_SOURCE"函数来检查是否使能了接收中断。
如果使能了接收中断且接收寄存器非空,可以使用"__HAL_UART_CLEAR_IT"函数清除接收中断标志位,并使用"HAL_UART_RxCpltCallback"函数来处理接收到的数据。
在回调函数中,可以通过使用"HAL_UART_Receive_IT"函数来继续接收更多的数据。
此函数可以在接收完成后自动调用回调函数,以便连续接收数据。
在主函数中,可以使用"HAL_UART_Receive_IT"函数启动接收数据。
STM32使用DMA加串口空闲中断接收数据
STM32使用DMA加串口空闲中断接收数据在STM32上使用DMA加串口空闲中断接收数据时,可以通过以下步骤实现:1.配置串口进行接收:-设置串口的波特率、数据位、停止位等参数;-使能串口的接收功能;-配置串口的空闲中断使能。
2.配置DMA进行接收:-设置DMA通道的传输方向为从外设到内存;-设置DMA的数据传输大小为字节;-设置DMA的外设地址为串口的数据寄存器地址;-设置DMA的内存地址为接收缓冲区的起始地址;-设置DMA的传输模式为循环传输,以实现连续接收;-使能DMA传输完成中断。
3.在空闲中断中处理接收到的数据:-在空闲中断服务函数中判断DMA传输是否完成;-如果传输完成,说明接收到了数据;-可以通过DMA的传输计数器获取到接收到的数据长度;-根据接收到的数据长度,可以在接收缓冲区中找到接收到的数据。
以下是一个示例代码,演示如何使用DMA加串口空闲中断接收数据:```c#include "stm32f4xx.h"#define BUFFER_SIZE 1024uint8_t rx_buffer[BUFFER_SIZE];volatile uint16_t rx_index = 0;void USART_Configuration(void)GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;DMA_InitTypeDef DMA_InitStructure;//使能USART1和DMA2时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2, ENABLE);//配置GPIOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 , GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);//配置USARTUSART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_HardwareFlowControl =USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx ,USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);//配置DMADMA_DeInit(DMA2_Stream2);DMA_InitStructure.DMA_Channel = DMA_Channel_4;DMA_InitStructure.DMA_PeripheralBaseAddr =(uint32_t)&USART1->DR;DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)rx_buffer;DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;DMA_InitStructure.DMA_BufferSize = BUFFER_SIZE;DMA_InitStructure.DMA_PeripheralInc =DMA_PeripheralInc_Disable;DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;DMA_InitStructure.DMA_PeripheralDataSize =DMA_PeripheralDataSize_Byte;DMA_InitStructure.DMA_MemoryDataSize =DMA_MemoryDataSize_Byte;DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;DMA_InitStructure.DMA_Priority = DMA_Priority_High;DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;DMA_InitStructure.DMA_FIFOThreshold =DMA_FIFOThreshold_HalfFull;DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;DMA_InitStructure.DMA_PeripheralBurst =DMA_PeripheralBurst_Single;DMA_Init(DMA2_Stream2, &DMA_InitStructure);//配置DMA接收完成中断DMA_ITConfig(DMA2_Stream2, DMA_IT_TC, ENABLE);//配置空闲中断USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);//使能USART和DMAUSART_Cmd(USART1, ENABLE);DMA_Cmd(DMA2_Stream2, ENABLE);//配置NVICNVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);void USART1_IRQHandler(void)if (USART_GetITStatus(USART1, USART_IT_IDLE) != RESET)//清除空闲中断标志USART_ReceiveData(USART1);//禁止DMA传输DMA_Cmd(DMA2_Stream2, DISABLE);//计算接收到的数据长度uint16_t length = BUFFER_SIZE -DMA_GetCurrDataCounter(DMA2_Stream2);//处理接收到的数据for (uint16_t i = 0; i < length; i++)// 处理rx_buffer[i]数据//...}//重启DMA传输DMA_SetCurrDataCounter(DMA2_Stream2, BUFFER_SIZE); DMA_Cmd(DMA2_Stream2, ENABLE);}int main(void)USART_Configuration(;while (1)//等待接收完成}//处理接收到的数据for (uint16_t i = 0; i < rx_index; i++)// 处理rx_buffer[i]数据//...}//重置接收状态rx_index = 0;}```请注意,代码中的波特率及其他配置可能需要根据您的实际需求进行修改。
STM32中断法USART串口简单使用

STM32中断法USART串口简单使用
1.初始化USART外设:首先需要在STM32的寄存器中对USART进行初始化。
具体的步骤包括:选择时钟源、配置波特率、设置数据长度、设置停止位、设置校验位等。
这些设置都可以在USART的控制寄存器中进行。
2.配置串口引脚:需要将USART的引脚与STM32的GPIO引脚进行连接。
具体的配置方法包括将GPIO引脚设置为复用功能,并且选择对应的USART信号。
3.编写中断服务函数:为了使用中断方式接收和发送数据,需要编写中断服务函数。
中断服务函数通常由硬件自动调用,当USART接收到数据或发送数据完成时触发。
在中断服务函数中,我们可以读取接收到的数据或者发送下一个数据。
4.使能中断:要使能USART的串口接收中断,需要在USART的控制寄存器中设置相应的位。
通常有RXNE和TC中断位,分别表示接收缓冲区非空和发送完成。
5.启动USART:启动USART外设,使其处于工作状态。
可以在相应的控制寄存器中设置TE(发送使能)和RE(接收使能)位。
6.外部中断配置:在STM32中,需要在NVIC寄存器中配置和使能USART接收中断的优先级。
这样才能通过中断向量表触发中断。
通过上述步骤,可以完成USART串口的简单使用,实现数据的接收和发送。
在编写中断服务函数时,可以根据实际需求进行数据处理,例如打印接收的数据或根据接收到的数据触发其他功能。
STM32HAL库使用中断实现串口接收不定长数据

STM32HAL库使用中断实现串口接收不定长数据要在STM32HAL库中实现串口接收不定长数据超过1200字,您可以使用中断来接收。
以下是一个简单的示例代码,演示了如何设置串口接收中断,并处理超过1200个字的数据:```c#include "stm32xxxx.h" // 根据您的STM32型号进行包含适当的头文件#define RX_BUFFER_SIZE 2000 // 定义接收缓冲区的大小//定义接收缓冲区和相关变量uint8_t rxBuffer[RX_BUFFER_SIZE];volatile uint16_t rxIndex = 0;volatile uint8_t rxDataAvailable = 0;//初始化串口void UART_Ini//串口GPIO引脚配置//串口时钟配置//串口配置//使能接收中断__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);//中断处理函数void USART1_IRQHandler(void)if ((__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE) != RESET)) rxBuffer[rxIndex++] = huart1.Instance->DR;if (rxIndex >= RX_BUFFER_SIZE)//接收超过1200字,进行处理//在这里添加您的处理代码//重置接收缓冲区和相关变量rxIndex = 0;rxDataAvailable = 0;} else//未达到1200字,继续接收rxDataAvailable = 1;}}int main(void)//初始化硬件//...//初始化串口UART_Init(;while (1)if (rxDataAvailable)//执行接收数据处理//在这里添加您的处理代码//重置接收缓冲区和相关变量rxIndex = 0;rxDataAvailable = 0;}//执行其他任务//...}```在上述代码中,我们首先定义了一个接收缓冲区 `rxBuffer`,并使用 `rxIndex` 变量来跟踪接收到的字节数。
STM32HAL库使用中断实现串口接收不定长数据

STM32HAL库使⽤中断实现串⼝接收不定长数据 以前⽤DMA实现接收不定长数据,DMA的⽅法接收串⼝助⼿的数据,全部没问题,不过如果接收模块返回的数据,⽽这些数据如果包含回车换⾏的话就会停⽌接收,例如接收:AT\r\nOK\r\n,就只能接收到AT\r,导致没有接收完成,具体原因还没搞懂,有了解的,希望可以告知⼀下,DMA不定长接收⽅法传输门:。
好了,不多说了,现在进⼊正⽂。
⾸先建⽴⼀个STM32Cumebx的⼯程,打开串⼝中断,完成配置,具体的配置流程就不细说了,没什么难度就只是打开串⼝跟中断⽽已。
⽣成⼯程代码后,先定义好⼀些变量://串⼝4中断接收定义#define MAX_RECV_LEN 1024 //设定可以接收的最⼤字节uint8_t msg_buff[MAX_RECV_LEN] = {0}; //接收缓存区uint8_t * msg = msg_buff; //定义⼀个指针指向接收缓存区int flag = 0; //接收完成标志int len_u4=0; //数据长度记录 接着重写串⼝接收回调函数/*重写串⼝接收回调函数*/void HAL_UART_RxCpltCallback(UART_HandleTypeDef*UartHandle){uint8_t ret = HAL_OK;msg++;len_u4++;//数据长度计数if( msg == msg_buff + MAX_RECV_LEN){msg = msg_buff;}do{ret = HAL_UART_Receive_IT(UartHandle,(uint8_t *)msg,1);}while(ret != HAL_OK);if(*(msg-1) == '\n') //接收以\n为结尾字符,则表⽰接收完成{flag = 1;}} 最后在main函数⾥⾯编写接收后的逻辑,注意要在while(1){ }前打开串⼝接收中断int main(void){/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration----------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init(); MX_DMA_Init(); MX_USART3_UART_Init();MX_UART4_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE *///⾃⼰添加代码部分:while前打开串⼝中断接收HAL_UART_Receive_IT(&huart4, (uint8_t *)msg, 1); //开启第⼀次中断while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///======⾃⼰添加代码部分=========if (flag == 1){printf("msg_buff = %s ;len = %d\r\n",msg_buff,len_u4); HAL_Delay(100); //加延时,保证接收到数据过长的时候,等待数据存⼊缓存区发送HAL_UART_Transmit(&huart3,msg_buff, len_u4,100); //将串⼝4接收到的数据通过串⼝3传出memset(msg_buff, 0, sizeof(msg_buff)); //清空缓存区// 指向接收缓存的头部msg = msg_buff;(&huart4)->pRxBuffPtr = msg;flag = 0;len_u4=0;//每次数据长度清0}HAL_Delay(10);}//==============================/* USER CODE END 3 */} 运⾏结果如下,效果正确 谈谈串⼝RS232跟RS485:这两个串⼝除了逻辑电平不同外,还有传输距离也不同,如果对速度要求不⾼,传输距离要⽐较远的就⽤RS485⽐较好,虽然RS485是个半双⼯,但是抑制共模⼲扰能⼒⽐较强,不过这些只是对于硬件层⾯的,对于软件层⾯来说他们的本质都是串⼝,在STM32Cubemx中,都是只是配置为串⼝,按照串⼝的编程来处理即可。