7-1 离散时间信号与系统的Z域分析
第七章离散时间信号与系统的Z域分析总结
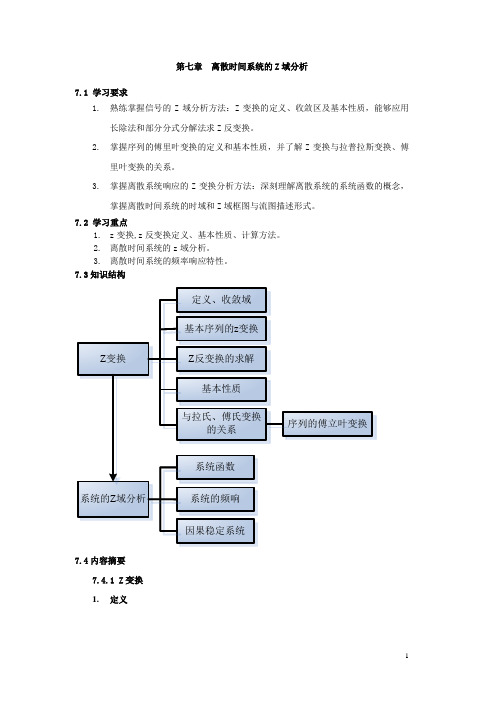
1 z X ( z) = 此时, = 1 − az −1 z − a
z > a 收敛域:
0
j Im[ z ]
a
*收敛域一定在模最大的极点 所在的圆外。
Re[ z ]
信号与系统
第7章 离散时间信号与系统的z域分析
13 /82
3.左边指数序列 x(n) = −b nu (−n − 1)
的形式 ,其中x2+Ax+B是实数范围内的不可约 多项式,而且k是正整数。这时称各分式为原 分式的“部分分式”。
信号与系统
第7章 离散时间信号与系统的z域分析
19 /82
M X ( z ) 通常, 可表成有理分式形式: b z −i ∑ i B( z ) = i =0N X ( z) = A( z ) 1 + ∑ ai z −i
z −n < ∞
n1 ≤ n ≤ n2 ;
信号与系统
第7章 离散时间信号与系统的z域分析
7 /82
因此,当时,只要,则 n= z − n 1/ z n , ≥0 同样,当时,只要,则 n <= 0 z z ,
n −n
z≠0 z≠∞ z
z −n < ∞
−n
<∞
所以收敛域至少包含,也就是除 0< z <∞ “有限平面” z= (0, ∞) z 。 ∞外的开域,即所谓
9 /82
(3)左边序列
x(n), n ≤ n2 x ( n) = n > n2 0,
X ( z)
n = −∞
= x ( n) z ∑ ∑ x ( n) z
−n n = −∞
n2
实验报告模版与说明
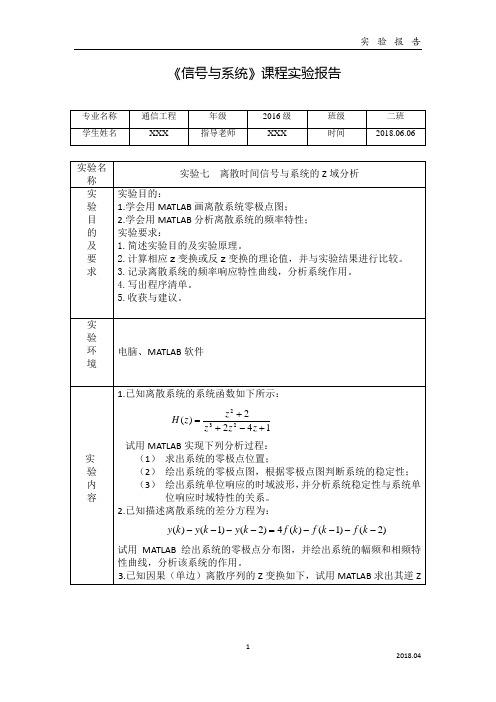
东莞理工学院信号与系统实验报告班级: 姓名: 学号: 指导老师: 日期:一、实验名称: 利用MA TLAB 进行离散时间信号与系统的Z 域分析(实验八)二、实验目的1、学会用MATLAB 进行Z 域部分分式展开;2、学会用MATLAB 分析离散LTI 系统的特性;3、学会用MATLAB 进行Z 正、反变换。
三、实验原理及内容1、用MATLAB 进行Z 域部分分式展开信号的Z 域表示式通常可用下面的有理分式表示)()(1)(221122110z den z num za z a z a zb z b z b b z F n n m m =++++++++=------ 为了能从系统的Z 域表示式方便地得到其时域表示式,可以将)(z F 展开成部分分式之和的形式,再对其取Z 反变换。
MATLAB 的信号处理工具箱提供了一个对)(z F 进行部分分式展开的函数residuez ,其调用格式为),(],,[den num residuez k p r =其中,num ,den 分别表示)(z F 的分子和分母多项式的系数向量,r 为部分分式的系数,p 为极点,k 为多项式的系数。
若)(z F 为有理真分式,则k 为零。
例8-1 试用MATLAB 对321431818)(-----+=zz z z F 进行部分分式展开。
解:计算程序如下:num=[18];den=[18,3,-4,-1];[r,p,k]=residuez(num,den)运行结果为:r=0.3600 0.2400 0.4000p=0.5000 -0.3333 -0.3333k=[]从运行结果可以看出,32p p =,这表示系统有一个二重极点。
所以,)(z F 的部分分式展开为:2111)3330.314.03333.0124.05.0136.0)(---++++-=z z z z F ( 2、用MATLAB 分析离散LTI 系统的特性如果系统函数)(z H 的有理函数表示式为11211121)(+-+-++++++++=n n n n m m m m a z a z a z a b z b z b z b z H 那么,系统函数的零极点就可通过函数roots 得到,也可償助函整tf2zp 得到,ufrz ተ的貃用格式为),(2],,[a b zp tf k p z =式中,b 和ተ分娫伺ț EMBE 䁄 Equati ተn.3 )(z H 的分子和分母多项式的系数向量。
信号与系统第8章 离散时间系统的z域分析
零状态响应为
Yf
(z)
(1 z 1 z 2 ) 2 3z 1 z 2
1 1 z 1
1/ 6 0.5 5 / 6 1 z1 1 z1 1 0.5z1
yf [k] Z 1{Yf (z)}{1/ 6 0.5(1)k (5/ 6)(0.5)k}u[k]
y[k] yx[k] yf [k] {1/ 6 3.5(1)k (4 / 3)(0.5)k}u[k]
离散时间信号与系统的Z域分析
• 离散时间信号的Z域分析 • 离散时间系统的Z域分析 • 离散时间系统函数与系统特
性
离散时间信号的Z域分析
• 理想取样信号的拉普拉斯变换 • 单边Z变换定义 • 单边Z变换的收敛域 • 常用序列的Z变换 • 单边Z变换的性质 • Z反变换
理想取样信号的拉普拉斯变换
fs (t) f (t) (t kT) f (kT) (t kT)
Re(z)
三、常用序列的Z变换
1) Z{ (k)} 1, z 0
2) 3)
Z{u(k)} 1 1 z
Z{aku(k)}
1 , 1
1 a
z
z
1
1 z
a
4)
Z{e
j0k
u(k
)}
1
e
1
j0
z
1
z z e j0
5)
Z{e-
j0k u (k
)}
1
1 e- j0
z
1
z z e- j0
z e j0 z e j0
解代数方程
二阶系统响应的z域求解
y[k] a1 y[k 1] a2 y[k 2] b0 f [k] b1 f [k 1] k 0
初始状态为y[1], y[2] 对差分方程两边做Z变换,利用
信号与系统实验(MATLAB 西电版)实验17 离散系统的Z域分析

实验17 离散系统的Z域分析
离散系统的分析方法可分为时域解法和变换域解法两大 类。其中离散系统变换域解法只有一种,即Z变换域解法。Z 变换域没有物理性质,它只是一种数学手段,之所以在离散 系统的分析中引入Z变换的概念,就是要像在连续系统分析 时引入拉氏变换一样,简化分析方法和过程,为系统的分析 研究提供一条新的途径。
F=ztrans(f): 实现函数f(n)的Z变换,默认返回函数F是 关于z
F=ztrans(f,w):实现函数f(n)的Z变换,返回函数F是关 于w
F=ztrans(f,k,w):实现函数f(k)的Z变换,返回函数F是 关于w的函数。
实验17 离散系统的Z域分析
2. 单边逆Z变换函数iztrans 功能:iztrans可以实现信号F(z)的逆Z
实验17 离散系统的Z域分析
3) 一个离散LTI系统,差分方程为y(k)-0.81y(k-2)=f(k)-f(k-2),
(1) 系统函数H(z); (2) 单位序列响应h(k)的数学表达式,并画出波形; (3) 单位阶跃响应的波形g(k); (4) 绘出频率响应函数H(ejθ)
实验17 离散系统的Z域分析
实验17 离散系统的Z域分析
MATLAB %确定信号的Z syms n z% f1=3^n f1_z=ztrans(f1) f2=cos(2*n) f2_z=ztrans(f2);
实验17 离散系统的Z域分析
f1 = 3^n f1_z = 1/3*z/(1/3*z-1) f2 = cos(2*n) f2_z = (z+1-2*cos(1)^2)*z/(1+2*z+z^2-4*z*cos(1)^2)
极点图见图17.3
实验17 离散系统的Z域分析
中北大学精品课程-7_离散时间信号与系统的z域分析
7 离散时间信号与系统的Z域分析
例 利用部分分式法,求 1 X ( z) , z 2 的z反变换。 1 1 (1 2 z )(1 0.5z )
1 z2 X ( z) 1 1 (1 2 z )(1 0.5 z ) ( z 2)( z 0.5) X ( z) z A1 A2 z ( z 2)( z 0.5) z 2 z 0.5
7 离散时间信号与系统的Z域分析
§ 7.2 Z反变换
7 离散时间信号与系统的Z域分析
7.2.1部分分式展开法 1.z变换式的一般形式
bi z i 1 ai z i
i 1 i 0 N M
B( z ) X ( z) A( z )
7 离散时间信号与系统的Z域分析
因此,X(z)可以展成以下部分分式形式
7 离散时间信号与系统的Z域分析
第7章 离散时间信号与系统的Z域分析
7.1 离散信号的Z变换 7.2 Z反变换 7.3 Z变换的基本性质和定理 7.4 Z变换与拉普拉斯变换傅里叶变换的关系 7.5 序列的傅里叶变换的定义和性质 7.6 利用Z变换求解差分方程 7.7 离散系统的系统函数和频率响应
7.8 离散系统的信号的流图
双边序列指n为任意值时,x(n)皆有值的序列,即左边序列 和右边序列之和。
X ( z)
n
x ( n) z x ( n) z
n n 0
n
n
x ( n) z
1
第一项为右边序列(因果)其收敛域为: z 第二项为左边序列,其收敛域为: 当Rx-<Rx+时,其收敛域为
*第一项为有限长序列,第二项为z的负幂级数,
7 离散时间信号与系统的Z域分析
7.离散时间信号与系统的z域分析
第七章离散时间系统的Z域分析7.1 学习要求1.熟练掌握信号的Z域分析方法:Z变换的定义、收敛区及基本性质,能够应用长除法和部分分式分解法求Z反变换。
2.掌握序列的傅里叶变换的定义和基本性质,并了解Z变换与拉普拉斯变换、傅里叶变换的关系。
3.掌握离散系统响应的Z变换分析方法:深刻理解离散系统的系统函数的概念,掌握离散时间系统的时域和Z域框图与流图描述形式。
7.2 学习重点1.z变换,z反变换定义、基本性质、计算方法。
2.离散时间系统的z域分析。
3.离散时间系统的频率响应特性。
7.3知识结构7.4内容摘要7.4.1 Z变换1.定义∑∞-∞=-=n nz n x z X )()( 表示为:)()]([z X n x Z =。
2. 收敛域 (1) 有限长序列12(),()0,x n n n n x n n ≤≤⎧=⎨⎩其他当0,021>>n n 时,收敛条件为0>z ;当0,021<<n n 时,收敛条件为∞<z ;当0,021><n n 时,收敛条件为∞<<z 0。
(2) 右边序列11(),()0,x n n n x n n n ≥⎧=⎨<⎩当01>n 时,收敛域为1x R z >,1x R 为最小收敛半径;当01<n 时,收敛域为∞<<z R x 1。
(3) 左边序列2(),()0,x n n n x n n ≤⎧=⎨⎩其他 当02<n ,收敛域为2x R z <,2x R 为最大收敛半径; 当02>n ,收敛域为20x R z <<。
(4) 双边序列双边序列指n 为任意值时,)(n x 皆有值的序列,即左边序列和右边序列之和。
其z 变换:∑∑∑∞=--∞=--∞-∞=-+==1)()()()(n n nnn nzn x zn x zn x z X双边序列的收敛域为一环形区域21x x R z R <<。
离散时间信号与系统的Z域分析
《信号与系统》课程实验报告变换。
zz z z z z F 2112)(232+++-=一、实验原理的验证 1、离散系统零极点图实验原理如下:离散系统可以用差分方程描述:∑∑==-=-Mm m Ni i m k f b i k y a 0)()(Z 变换后可得系统函数:NN MM z a z a a z b z b b z F z Y z H ----++++++==......)()()(110110 可以用root 函数可分别求零点和极点。
例7-4 求系统函数零极点图131)(45+-+=z z z z H实验结果如下:2、离散系统的频率特性实验原理如下:离散系统的频率特性可由系统函数求出,既令ωj e z =,函数freqz 可计算频率特性,调用格式是:[H ,W]=freqz(b,a,n),b 和a 是系统函数分子分母系数,n 是π-0范围内n 个等份点,默认值为512,H 是频率响应函数值,W 是相应频率点; 例7-5 系统函数z z z H 5.0)(-=10个频率点的计算结果为幅频特性曲线相频特性曲线freqz语句直接画图例7-7已知系统函数114/11)1(4/5)(----=z z z H ,画频率响应和零极点图。
零极点图幅频特性曲线相频特性曲线二、已知离散系统的系统函数如下所示:1422)(232+-++=z z z z z H试用MATLAB 实现下列分析过程: (1)求出系统的零极点位置;(2)绘出系统的零极点图,根据零极点图判断系统的稳定性; (3)绘出系统单位响应的时域波形,并分析系统稳定性与系统单位响应时域特性的关系。
(1)由计算结果可知:系统的极点为p0=-3.3028、p1=1、p2=0.3028。
由计算结果可知:系统的零点为z0=1.4142i 、z1=-1.4142i 。
(2)系统的零极点图如下:程序清单如下: a=[1 2 -4 1]; b=[1 0 2]; ljdt(a,b)p=roots(a)q=roots(b)pa=abs(p)由图可知:第一个极点(p0)在单位圆外部,第二个极点(p1)在单位圆上,第三个极点(p2)在单位圆内部,因为有一个极点在单位圆外部,故该系统是不稳定的系统(稳定系统要求极点全部在单位圆内)。
数字信号处理实验离散时间 LTI 系统的时域分析与 Z 域分析
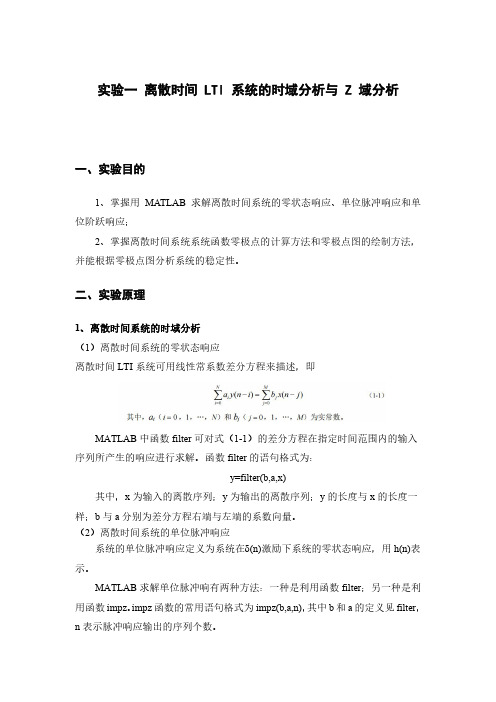
实验一离散时间LTI系统的时域分析与Z域分析一、实验目的1、掌握用MATLAB求解离散时间系统的零状态响应、单位脉冲响应和单位阶跃响应;2、掌握离散时间系统系统函数零极点的计算方法和零极点图的绘制方法,并能根据零极点图分析系统的稳定性。
二、实验原理1、离散时间系统的时域分析(1)离散时间系统的零状态响应离散时间LTI系统可用线性常系数差分方程来描述,即MATLAB中函数filter可对式(1-1)的差分方程在指定时间范围内的输入序列所产生的响应进行求解。
函数filter的语句格式为:y=filter(b,a,x)其中,x为输入的离散序列;y为输出的离散序列;y的长度与x的长度一样;b与a分别为差分方程右端与左端的系数向量。
(2)离散时间系统的单位脉冲响应系统的单位脉冲响应定义为系统在 (n)激励下系统的零状态响应,用h(n)表示。
MATLAB求解单位脉冲响有两种方法:一种是利用函数filter;另一种是利用函数impz。
impz函数的常用语句格式为impz(b,a,n),其中b和a的定义见filter,n表示脉冲响应输出的序列个数。
(3)离散时间系统的单位阶跃响应系统的单位阶跃响应定义为系统在ε(n)激励下系统的零状态响应。
MATLAB求解单位脉冲响应有两种方法:一种是利用函数filter,另一种是利用函数stepz。
stepz函数的常用语句格式为stepz(b,a,N)其中,b和a的定义见filter,N表示脉冲响应输出的序列个数。
2、离散时间系统的Z域分析(1)系统函数的零极点分析离散时间系统的系统函数定义为系统零状态响应的z变换与激励的z变换之比,即如果系统函数H(z)的有理函数表示式为那么,在MATLAB中系统函数的零极点就可通过函数roots得到,也可借助函数tf2zp得到。
roots的语法格式为:Z=roots(b)%计算零点b=[b1b2…bmbm+1]P=roots(a)%计算极点a=[a1a2…anan+1]tf2zp的语句格式为[Z,P,K]=tf2zp(b,a)其中,b与a分别表示H(z)的分子与分母多项式的系数向量。
离散系统的Z域分析
k
cos(
0
k
)
k
z
z2 z2 z cos 2z2 2z cos 0
0
1
2
..........
k
sin 0k
k
z
2z2
z 2
sin 0 z cos 0
1 2
.........
k k
k
z (z )2k kk Nhomakorabea1
五、ZT & DTFT
求和收敛
设f(k)
为因果序列、则
F (e j ) f k e jk
Z eS Ts e e Ts jTs e j
k
F (z) f (k)zk k 0
e Ts
Ts
2 s
S 域中的一点→ → Z 域中的一点;Z 域中的一点→ → S 域中的无穷个点。
S 1 Ln z 1 Ln(e j ) 1 Ln j
Ts
Ts
Ts
Ts
三、收敛域: F (z) f k zk
ak (k) bk (k 1) z z ∣a∣< |z|< |b|
za zb
jIm[z]
|b|
|a|
o
Re[z]
四、常用 z 变换
(k+1) ←→z; (k-1) ←→z-1;……
(k) ←→1 (k) ←→z/(z-1) ←→ - (- k-1)
零、极 点分布
k k z k k 1
F(z)
K1 e j z
z e j
K1 e j z
z e j
若z> , f(k)=2K1kcos(k+)(k),… …
(3) F(z)有重极点 推导记忆:
离散信号与系统的Z域分析
8 离散信号与系统的 Z 域分析 p 16
例: F(z) = 1/(za) |z| a 求f [k]。 解:
1 F ( z) z 1 1 az
z 例: (3) u[k ] , z 3 z 3
k
类似于傅氏、拉氏变换的尺度变换特性。
1 1 s L f (at ) F ( j ) f (at ) F ( ), a a a a
F
8 离散信号与系统的 Z 域分析 p 18
a 0, a 0
例*:求aksin(0k) u[k] 的z变换及收敛域
1 cos 0 z 1 1 2 z 1 cos 0 z 2 sin 0 z 1 1 2 z 1 cos 0 z 2
五、单边z变换的主要性质
f [k ] F ( z), z R f
f1[k ] F1 ( z), z R f 1
1 2
sin 0 z 1 za 2 2 z 1 cos 0 z 2
8 离散信号与系统的 Z 域分析 p 19
五、单边z变换的主要性质
4. z域微分特性(时域线性加权)
dF ( z ) kf [k ] z dz
Z
Z Rf
m d m d F ( z) Z m m 或写成 : ( z ) F ( z ) k f [k ] ( z ) m dz dz
2 2
8 离散信号与系统的 Z 域分析 p 13
五、单边z变换的主要性质
2. 位移特性(记忆)
因果序列的位移
信号与系统chapter 7离散时间信号与系统的Z域分析
由此可见,位移特性Z域表达式中包含了系统的起始条 件,把时域差分方程转换为Z域代数方程,因此,可以方便 求出Z域的零输入响应和两状态响应。
式(7.3)又称为左移序性质,与拉普拉斯变换的时域 微分特性相当。式(7.4)又称右移序性质,与拉普拉斯变 换的时域积分特性相当。
进一步,对于因果序列 x ( n ) , x ( 1 ) 0 ,x ( 2 ) 0 , ,则
Z [nx(n)u(n)]zdd zn∞ 0znx(n)zdd zX(z)
求下列序列的Z变换。
(1) n 2 u ( n )
n(n 1)
(2)
u(n)
解:(1 )Z[n2 u(n)] zd d z 2zz 1 zd d z2 zd d z zz 1
dz
z2 z
z [
]
, z 1
zlnz1 1ln1 zzlnzz1,z1
(2)因为
Z1
u(n 1) , z 1 z 1
根据Z域积分特性,可得
∞1
X(z)
x 1dx∞
1
z dxln ,z1
2
z x1
z x(x1 )
z1
§ 6. 卷积和定理
若 x1(n)u(n) ZX 1(z),z Rx;x2(n)u(n) ZX2(z),z Rx,则 :
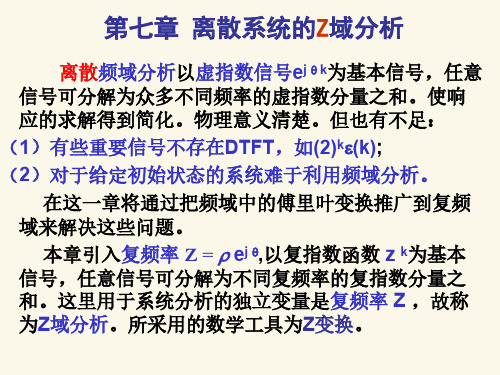
第七章 离散时间信号与系统的Z域分析
7.1引言 7.2 Z 变换 7.3 Z 变换的性质 7.4 反变换 7.5离散时间系统的 Z 域分析 7.6离散时间系统的系统函数与系统特性 7.7离散时间系统的模拟
7.1 引 言
按照与连续时间信号与系统相同的分析方法,本章将
讨论离散时间信号与系统的 z 域分析。
§ 4. Z域微分特性
离散信号与系统的 Z 域分析
第 六 章 离散信号与系统的 Z 域分析引言与线性连续系统的频域分析和复频域分析类似,线性离散系统的频域分析是输入信号分解为基本信号e jΩk 之和,则系统的响应为基本信号的响应之和。
这种方法的数学描述是离散时间傅里叶变换和逆变换。
如果把复指数信号e jΩk 扩展为复指数信号Z k ,Z=re jΩ ,并以Zk 为基本信号, 把输入信号分解为基本信号Z k 之和, 则响应为基本信号Z k 的响应之和。
这种方法的数学描述为Z 变换及其逆变换,这种方法称为离散信号与系统的Z 域分析法.如果把离散信号看成连续时间信号的 抽样值序列,则Z 变换可由拉普拉斯变换引入.因此离散信号与系统的Z 域分析 和连续时间信号与系统的复频域分析有许多相似之处.通过Z 变换,离散时间信 号的卷积运算变成代算,离散时间系统的差分方程变成Z 域的代数方程,因此可 以比较方便的分析系统的响应。
Z 变换从拉普拉斯变换到Z 变换对连续信号f(t)进行理想抽样,即f(t)乘以单位冲击序列δT (t),T 为 抽样间隔,得到抽样信号为f s (t)=f(t)δT (t)= =对fs(t)取双边拉普拉斯变换,得F s (s)=£[fs(t)]=令z=e sT , 则Fs(s)=F(z) ,得F(z)=因为T为常数,所以通常用f(k)表示f(kT),于是变为F(z)=称为f(k)的双边Z变换,z为复变量。
z和s的关系为:z=e sTs=(1/T)㏑z由复变函数理论,可以得到f(k)= ∮cF(z)z k-1 dz式(7.1-5)称为F(z)的双边Z逆变换(后面讨论).双边Z变换的定义和收敛域§双边 Z 变换的定义对于离散序列f(k)(k=0,±1,±2,┄),函数(z的幂级数)F(z)=称为f(k)的双边Z变换,记为F(z)=Z[f(k)].F(z)又称为f(k)的象函数,f(k)又 称为F(z)的原函数.为了表示方便,f(k)与F(z)之间的对应关系可表示为 f(k) F(z)§双边 Z 变换的收敛域f(k)的双边Z变换为一无穷级数,因此存在级数是否收敛的问题.只有当 (7.1-6)式的级数收敛,F(z)才存在.F(z)存在或级数收敛的充分条件是 ∞在f(k)给定的条件下,式(7.1-6)级数是否收敛取决于z的取值.在z复平面上, 使级数收敛的z取值区域称为F(Z)的收敛域。
信号与系统课后习题答案第7章

143
第7章 离散信号与系统的Z域分析 144
第7章 离散信号与系统的Z域分析
题图 7.7
145
第7章 离散信号与系统的Z域分析 146
第7章 离散信号与系统的Z域分析
题解图 7.31
147
第7章 离散信号与系统的Z域分析
(2) 由H(z)写出系统传输算子: 对应算子方程和差分方程为
148
7.25 已知一阶、二阶因果离散系统的系统函数分别如下, 求离散系统的差分方程。
111
第7章 离散信号与系统的Z域分析 112
第7章 离散信号与系统的Z域分析 113
第7章 离散信号与系统的Z域分析 114
第7章 离散信号与系统的Z域分析
7.26 已知离散系统如题图7.5所示。 (1) 画出系统的信号流图; (2) 用梅森公式求系统函数H(z); (3) 写出系统的差分方程。
① 或者
② 容易验证式①、②表示同一序列。
57
第7章 离散信号与系统的Z域分析 58
第7章 离散信号与系统的Z域分析 59
第7章 离散信号与系统的Z域分析 60
第7章 离散信号与系统的Z域分析 61
第7章 离散信号与系统的Z域分析
也可以将Yzs(z)表示为
再取Z逆变换,得 ②
自然,式①、②为同一序列。
44
第7章 离散信号与系统的Z域分析 45
第7章 离散信号与系统的Z域分析 46
第7章 离散信号与系统的Z域分析
7.10 已知因果序列f(k)满足的方程如下,求f(k)。
47
第7章 离散信号与系统的Z域分析 48
第7章 离散信号与系统的Z域分析
(2) 已知K域方程为
49
《信号与系统》讲义教案第6章离散信号与系统的Z域分析
第 6 章离散信号与系统的Z 域分析6.0 引言与拉氏变换是连续时间傅立叶变换的推广相对应,Z 变换是离散时间傅立叶变换的推广。
Z 变换的基本思想、许多性质及其分析方法都与拉氏变换有相似之处。
当然, Z 变换与拉氏变换也存在着一些重要的差异。
6.1 双边 Z 变换6.1.1双边Z变换的定义前面讨论过,单位脉冲响应为h[n] 的离散时间 LTI 系统对复指数输入z n的响应y[n]为y[ n]H ( z) z n(6.1)其中H ( z)h[ n] z n(6.2)n式 (6. 2) 就称为 h[n] 的双边 Z 变换。
当 z= e j时, Z 变换就转变为傅立叶变换。
因此一个离散时间信号的双边Z 变换定义为:X ( z)x[ n]z n(6.3)n式中 z 是一个复变量。
而x[n]与它的双边z 变换之间的关系可以记做zx[n]X (z)6.1.2双边Z变换的收敛域x[n] 的双边 Z 变换为一无穷级数,因此存在级数是否收敛的问题,即一方面并非所有信号的Z 变换都存在;另一方面即使某信号的Z 变换存在,但并非Z 平面上的所有点都能使X(z)收敛。
那些能够使X(z)存在的点的集合,就构成了X(z)的收敛域,记为ROC。
只有当式 (6.3) 的级数收敛,X (z) 才存在。
X ( z) 存在或级数收敛的充分条件是x[n]z n(6.4)n在 x[ n] 给定的条件下,式 (6.4)级数是否收敛取决于 z 的取值。
在 z 复平面上,使式 (6.4)级数收敛的 z取值区域就是 X(z)的收敛域。
6.1.3零极点图如果X(z) 是有理函数,将其分子多项式与分母多项式分别因式分解可以得到:N ( z)(z z i )X ( z)i(6.5)M(zD ( z)z p )p则由其全部的零极点即可表示出X ( z) ,最多相差一个常数因子。
在Z 平面上表示出全部的零极点,即构成X ( z) 的几何表示——零极点图。
第七章 z变换、离散时间系统的z域分析 PPT课件

1
n
u(n)的z变换,
2
3
并标明收敛域,绘出零极点图。
解:Zx(n)
x(n)zn
1
n
z
+
n
1
n
z
n
1
n
+
1
n
n-
n0 2
n0 3
n0 2z n0 3z
当 1 2z
1即 z
1时,
1
n
2 n0 2z
1 1-1/(2z)
z z1
2
当1 3z
1即 z
1时,
1
n
X (z) k A
m
z
m0 z z
m
其中,z 是 X (z)的极点,z 0。
m
z
0
A m
z
z m
X (z) z
zzm
k
X (z)
Az m
m0 z z
m
k
m0
A m
z m
n
u
(
n),
(右边Fra bibliotek序列
)
x(n)
Z
X 1
(z)
Z
1
k
m0
A m
z
z z
m
k
m0
A m
z m
n
u(n
1),(左边序列)
级数的系数就是序列x(n)。
• 右边序列,N(z)、D(z)按z的降幂(或z-1的升幂)排列
X (z) x(n)zn x(0)z0 x(1)z1 x(2)z2 n0
• 左边序列,N(z)、D(z)按z的升幂(或z-1的降幂)排列
1
X (z) x(n)zn x(1)z1 x(2)z2 x(3)z3 n
信号与系统 第六章离散系统的Z域分析

Z平面
k 1 k (1 z ) ( 3z ) 3 k 1 k 0
0
|z|<3时,第一项收敛于
z ,对应于左边序列。 z 3 z |z|>1/3时,第二项收敛于 ,对应于右边序列。 1 收敛域 z3
1 3
3
1 当 | z | 3 时, 3
8 z z 3 z F ( z) 1 z 3 z 3 ( z 3)( z 1 3)
应用尺度变换:
k
sin k (k )
z a
z sin z 2 2 z cos 1
0< a <1
sin a z sin a sin k (k ) z 2 z ( a ) 2( a ) cos 1 z 2 2 a z cos a 2
§6.2
Z变换的性质
| k-3|(k)
解:(1) F z
k k k z 1
k 1
(2) 双边z变换: F z
k
f k z
k
2 1 z 2z 3 2 z z
2
0 z
单边z变换: F z f k z
k 0
长春理工大学
零点:0 极点:3,1/3
§6.1
Z 变换
Z变换的收敛域
收敛域内不包含任何极点,在极点处,F(z)为无穷大, Z变换不收敛。 有限长序列的收敛域为整个Z平面, 可能不含z=0, z=。 因果有限长序列: F(z)=f (1)z -1+ f (2)z -2+· · · · |z|>0 反因果有限长序列: F(z)=f (-1)z 1+ f (-2)z2+· · · · |z|< 如果是因果序列,收敛域为|z|>0圆的外部。 如果是左边序列,收敛域为|z|<0 。 如果是双边序列,收敛域由圆环组成。
第七章 离散信号与系统的Z域分析
f (k ) 3k (k 1) 3k (k 2)
31 3k 1 (k 1) 32 3k 2 (k 2)
由表7.1
根据双边Z变换位移性质,得: z z2 3k 1 (k 1) z z 3 z 3
z 3 (k ) z 3
(2) 无限长因果序列双边Z变换的收敛域为|z|>|z0|,z0为复数、虚数或实数, 即收敛域为半径为|z0|的圆外区域。 (3) 无限长反因果序列双边Z变换的收敛域为|z|<|z0|,即收敛域为以|z0|为 半径的圆内区域。
(4) 无限长双边序列双边Z变换的收敛域为|z1|<|z|<|z2|,即收敛域位于以|z1| 为半径和以|z2|为半径的两个圆之间的环状区域。
k 0
f (i) z
( i m )
z
1
m
i m
f (i) z
i
z [ f (i) z
m i i 0
i m
f (i) z
1
i
]
z m [ F ( z )
i m
f (i) z i ]
z
7.2 Z变换的性质
例 7.2-3 已知f(k)=3k[ε(k+1)-ε(k-2)],求f(k)的双边Z变换 及其收敛域。 解: f(k)可以表示为
(5) 不同序列的双边Z变换可能相同,即序列与其双边Z变换不是一一对 应的。序列的双边Z变换连同收敛域一起与序列才是一一对应的。
7.1 Z 变 换
7.1.3 常用序列的双边Z变换
(1) f (k ) (k )
F ( z)
k
(k ) z k (0) z 0 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
|z|>0
ROC扩大
线性加权后序列z变换的ROC可能比原序列z变换的ROC1大3
例:求以下周期序列的单边z变换。
(1)
f [k]
1, 0,
k 2n, k 2n 1,
n 0, n 0,
1, 1,
2, 2,
k
(2) y[k ] (1)i f [k i]
i0
分析:周期为N的单边周期序列fN[k]u[k]可以表示为第一个
9
五、单边z变换的主要性质
2. 位移特性
➢ 因果序列的位移 f [k n] u[k n] znF(z) |z|> Rf
➢ 非因果序列的位移
n1
Zf [k n]u[k] z n[F (z) f [k]z k ] |z|> Rf k 0 1
Zf [k n]u[k] z n[F (z) f [k]z k ] |z|> Rf k n 10
单边z变换
F(z)
f [k]z k
k 0
收敛域(ROC)
使上式级数收敛的所有z的范围称为F(z)的收敛域
右边序列的收敛域为z
Im z
平面中的一圆外区域
ROC
R
f
Re z
z Rf
6
例:求以下序列的Z变换及收敛域。
(1) f [k] a k u[k]
(2)
f
[k]
1 0
0 k N 1 其它
解:
周期序列f1[k]及其位移f1[klN]的线性组合,即
f N [k]u[k] f1[k lN ] l0
若计算出f1[k]的z变换F1(z),利用因果序列的位移 特性和线性特性,则可求得其单边周期序列的z变换为
Zf N [k]u[k]
l0
F1 (z)z Nl
F1(z) 1 zN
z 114Fra bibliotek例:求以下周期序列的单边z变换。
(1)
f [k]
1, 0,
k 2n, k 2n 1,
n 0, n 0,
1, 1,
2, 2,
k
(2) y[k ] (1)i f [k i]
i0
解:(1) f [k]可表示为 f [k] [k] [k 2] [k 4]
利用[k]的Z变换及因果序列的位移特性,可得
F(z) 1 z2 z4 1 1 z 2
sin 0 z 1 2z 1 cos 0
z 2
8
五、单边z变换的主要性质
f [k]zF(z), z Rf
f1[k]zF1(z), z R f 1
f2[k]z F2 (z), z R f 2
1.线性特性
af1[k] bf2[k] aF1(z) bF2 (z)
z max(Rf 1, Rf 2 )
C为F(z) 的收敛域(ROC )中的一闭合曲线
由 Z 变换的定义式两边乘以 zm1 ,然后用围线求积分
F(z)zm1dz
f [k]z(m1k)dz
C
C k
交换积分与求和顺序,得
F(z)zm1dz f [k] z(m1k)dz (*)
C
k
C
4
二、z变换定义及符号表示
根据复变函数中的 Cauchy 积分定理
C
z m 1dz
2πj
0
m0 m0
从而(*)中只有 k m 这一项不等于零
F(z)zm1dz 2πjf [m]
C
物理意义: 将离散信号分解为不同频率复指数esTk的线性组合
符号表示
正变换:F(z)=Z{f[k]} 反变换: f[k] =Z1{F(z)}
或
f [k]z F (z)
5
三、单边z变换及其收敛域
z2F(z) z1 f [1] f [2]
依此类推 可证上式成立
12
例:求RN[k]=u[k]u[kN]的z变换及收敛域
解:
u[k]Z 1 , z 1 1 z 1
利用因果序列的位移特性和线性特性,可得
F(z)
1 1 z 1
1
zN z 1
1 zN 1 z 1
由于RN[k]为有限长序列,故其收敛域为
z 1
k
(2) 将y[k]改写为 y[k] (1)i f [k i] (1)k u[k] * f [k]
i0
由(1)题的结果及卷积特性,可得 Y (z)
五、单边z变换的主要性质
2. 位移特性 1
证明 Zf [k n]u[k] z n[F (z) f [k]z k ]
k n
f [k]
z F(z)
f [k 1]
f [k 2]
0
k
0
k
0
k
Z{ f [k 1]u[k]} Z{ f [k 1]u[k 1] f [1][k]}
z1F(z) f [1]
11
五、单边z变换的主要性质
2. 位移特性 1
证明 Zf [k n]u[k] z n[F (z) f [k]z k ] k n Z{ f [k 1]u[k]} z1F (z) f [1]
Z{ f [k 2]u[k]} Z{ f [k 2]u[k 2] f [1][k 1] f [2][k]}
离散时间信号与系统的Z域分析
离散时间信号的Z域分析 离散时间系统的Z域分析 离散时间系统函数与系统特性 离散时间系统的模拟
1
离散时间信号的z域分析
理想取样信号的拉普拉斯变换 z变换定义 单边z变换及其收敛域 常用单边序列的z变换 单边z变换的性质 单边z反变换
2
一、理想取样信号的拉普拉斯变换
f s (t) f (t) (t k T) f (k T) (t k T)
za
Z{u[k]}
1 1 z1
z 1
z
,
z 1
3) Z{e j0k u[k]}
1
1 cos 0 z 1 jsin 0 z 1
1 e j0 z 1
1 2z 1 cos 0 z 2
cos( 0k)u[k]
1
1 cos 0 z 2z 1 cos 0
1
z
2
sin( 0k)u[k] 1
(1)
F(z)
k 0
ak zk
1 1 az1
ROC : z a
Im z
|a|
Re z
(2)
N 1
F(z)
k 0
z k
1 1
zN z 1
ROC : z 0
有限长序列z变换的收敛域为|z|>0 7
四、常用单边序列的Z变换
1) Z{[k]} 1, z 0
2)
Z{
k
u[k
]}
1
1
z
1
令 a 1,即得
k
k
Fs (s) L[ f s (t)] f (kT)eksT k
令e sT z, 有
L{ f s (t)}
f
[k]z k
F(z)
k
s域到z域的映射关系:
z esT
3
二、z变换定义及符号表示
双边z变换 z反变换
F(z)
f [k]z k
k
f
[k]
1 2πj
c
F (z)z k1dz