梯形图程序的设计方法s7-200资料
零基础学习PLC入门,6个指令完成模拟量程序梯形图(附程序)

零基础学习PLC入门,6个指令完成模拟量程序梯形图(附程序)这一节讲述4-20mA的模拟量信号进入西门子S7-200PLC以后,PLC怎样通过程序把它变成我们想要的实际数值。
虽然这节讲的是西门子PLC的模拟量处理程序,但道理都是一样的,你只要把程序的原理弄明白了,在其他品牌的PLC上应用也是一样的,不管是三菱的还是施耐德的都一样。
所以文章最后我会附上本节所讲的程序的下载方法,有需要的朋友可以自己下载研究。
通过上一节的学习我们知道,模拟量其实就是一个在一定数字范围内连续变化的数值。
这个数字范围绝大多数都是用4-20mA这个电流信号作为标准范围,至于为什么这样用,上一节已经讲的很清楚了,这里不再重复。
接下来看图1。
图1,的左边是一个量程范围为0-10kpa的压力变送器,它的输出电流就是0-10kpa对应4-20mA,所以压力在5kpa时对应的电流就是12mA,我们只要在电路中串联一个数字万用表就能看到电流的读数,然后我们通过这个读数,拿一个计算器通过加减乘除就能算出实际的压力是5kpa。
这就是手动的算法,如果用这种算法去算实际压力值,简直就是太老土了。
这些活只要交给PLC去干就行了,你只要把程序写好PLC就会不知疲倦的去算还不会出错,我们腾出时间看点自己想看的片片多好呢。
那怎么让PLC去算呢?很简单,我们只要做两件事就可以了。
第一,硬件部分,看图1的右边,我们只要在原来接数字万用表的地方,接一个PLC的模拟量输入模块就行了,你没看错,原理就是这样的。
它实际的接线图就是下面的图2。
在图2我们看到压力变送器和PLC的模拟量模块串联在一起,模拟量模块把接收到的4-20mA电流信号经过处理传送给PLC,这样PLC就能通过程序计算出实际的压力值了。
它的内部处理过程如下。
图3,是模拟量信号在PLC内部的处理过程和工作原理,只要能看明白这张图,我下面讲程序时你就能很容易理解了。
其实模拟量模块内部和压力变送器内部一样,都是有一块电路板。
西门子S7-200 SMART PLC原理及应用教程课件第六章
3)动力头快进到工进位置时,输入信号I0.1有效;指令“SCRT SO.2"对应的状态继电器 SO.2的状态由“0”变为“1”,操作系统使状态继电器SO.1的状态由“1”变为“0”,快进活动步 变为静止步,状态继电器SO.1对应的SCR段程序不再被执行。系统从快进步转换到T进步,
输出信号QO.O变为OFF,QO.1变为ON,动力头工进。 4)动力头工进到位后,输入信号10.2有效;指令“SCRTSO.3"对应的状态继电器SO.3的状
5)动力头快退返回原位后,输入信号IO.O有效;指令“SCRT SO.O’’对应的状态继电器 SO.O的状态由“0”变为“1”,操作系统使状态继电器SO.4的状态由“1”变为“0”,动力头快 退步由活动步变为静止步,状态继电器SO.4对应的S(、R段程序不再被执行,输出信号
Q0.2变为OFF,动力头停止运行。系统从快退步转换到初始步,在原位等待起动信号。
表6-1 S7-200 PLC顺序控制指令
第三节 顺序控制的梯形图编程方法
使用S7-200 Smart系列PLC顺序流程指令需要注意以下几点。 1)顺序控制指令仅对状态继电器S有效,S也具有一般继电器的功能,对它还 可使用与其他继电器一样的指令。 2)SCR段程序(LSCR至SCRE之间的程序)能否执行,取决于该段程序对应的 态器S是否被置位。另外,当前程序SCRE(结束)与下一个程序LSCR(开始) 之间程序不影响下一个SCR程序的执行。 3)同一个状态器S不能用在不同的程序中,如主程序中用了S0.2,在子程序 中不能再使用它。 4)SCR段程序中不能使用跳转指令JMP和LBL,即不允许使用跳转指令跳人、 到ISCR程序或在SCR程序内部跳转。 5)SCR段程序中不能使用FOR.NEXT和END指令。 6)在使用SCRT指令实现程序转移后,前SCR段程序变为非活动步程序,该程 序的元件会自动复位,如果希望转移后某元件能继续输出,可对该元件使用 置位或复位指令在非活动步程序中,PLC通电常ON触点SMO.O也处于断开状 态。
S7-200电梯控制系统梯形图

OUT VB2
M0.0 R 2
M0.2 S 1
M0.3 R 4
Q4.5 S 1
网络 2 用户输入指令登记程序
I0.0
M1.0 S 1
网络 3 I0.1
M1.1 S 1
网络 4
1 / 29
Created with SmartPrinter trail version
I0.2
M3.2
MOV_B
EN
ENO
1 IN
OUT VB0
网络 42 I2.3
M3.3
MOV_B
EN
ENO
2 IN
OUT VB0
网络 43
6 / 29
Created with SmartPrinter trail version
I2.4
梯形图 / 主程序 (OB1)
M3.4
MOV_B
M1.5 /
M2.0 /
M2.1 /
M2.2 /
M2.3 /
57.B
57.C
12 / 29
Created with SmartPrinter trail version
梯形图 / 主程序 (OB1)
M2.4 /
M2.5 /
M2.6 /
M2.7 /
M3.0 /
57.C
13 / 29
M0.0
M0.1 /
Q3.4
网络 62
M0.0 /
M0.1
Q3.5
网络 63 Q3.4
Q3.5
I3.2
Q3.6
网络 64 Q3.4
Q3.6
Q4.0 /
I3.1 /
Q3.7
15 / 29
第5章 S7-200系列PLC的基本指令及程序设计-2

●计数器的当前值≠0时,其状态位为0;而它 的当前值=0时,状态位置 1,且停止计数。 ●当装载输入端 LD=1时,减计数器复位:
当前值=设定值,状态位=0。
计数器的应用 举例--计数范围的扩展
【例5-4-1】: 做一个计数器,当计数到200000时, 使Q0.0 = 1。 控制程序如下:
2
手动复位 初始化
●跳转/标号指令必须成对使用,且只能用在同一程 序块中。 ●跳转/标号指令中, n 的范围: 0~255。 ●执行跳转指令后,跳过程序段中各个元件(除定 时器外)的状态不变,保持跳转前的状态。
●跳过程序段中若有定时器:
a.1ms、10ms的定时器,系统会对它们周期 刷新,故会继续计时. b. 对于100ms的定时器,只有执行指令时其 当前值和状态位才会被刷新,因此跳过程序 段中的定时器指令因不执行而停止刷新,会 使定时器计时失准.
跳转、标号指令应用
【例5-3-5】
有一个机械手, 用工作方式开关
选择手动、单步
、自动工作方式
,主程序如下:
6. 子程序
● 在结构化程序设计时,采用子程序可以
优化程序结构,减少扫描时间;
● 与子程序相关的操作有: ※ ※ ※ 建立子程序 子程序调用 子程序返回
1)创建子程序
用命令“编辑” 程序” “插入” “子
第五章 S7-200PLC 基本指令及程序设计-2
河南延龙机电设备有限公司
§5-3 PLC的梯形图程序设计方法
1. 梯形图程序设计的方法 梯形图程序的基本 形式:
X开:开启条件 X关:关断条件 Fk 的自锁触点。
Fk
尽可能是短信号.
线圈Fk: 逻辑运算的中间(或最终)结果;
1)梯形图程序的设计方法:
Plc程序设计_S7200讲解
• 2.选择序列
对于图8-19所 示的选择序列, 采用置位复位 法实现的梯形 图程序如图825所示。选择序 列的分支如 图 8-25所示的 “ 网络3”和 “网络4”, 选择序列的合 并如图825“网络7” 所示。
图8-25 选择序列的置位复位法实 现
• 采用顺序控制继电 器作为步序标志写 出图8-29所示的单 序列顺序功能图, SCR指令实现的梯 形图程序如图8-30 所示。
SM0.1
S0.0
I0.0
S0.1
Q0.0 Q0.1
I0.1
S0.2
Q0.1
I0.2
S0.3
Q0.2
I0.3
图8-29 单序列
2. 选择序列
• 对于图8-31所示的选 择序列,采用SCR指 令实现的梯形图程序 如图8-32所示,请结 合顺序控制指令自行 分析。
图8-40 定义向导所生成的PID初始化子程序和中断程序名及手/自动模式对话框
• 单击图8-40 “下一步”,生成PID子程序、中断 程序及符号表等,即完成PID向导的组态。
图8-41 PID向导生成的符号表示例
• 图8-42所示为在主程 序调用PID子程序的清 单及注释。调用PID子 程序时,不用考虑中 断程序。子程序会自 动初始化相关的定时 中断处理事项,然后 中断程序会自动执行。
(3)自动确定滞后和偏差
• 参数“滞后”(Hysteresis)指定了过程变量相对于给定 值的正负偏移量,过程变量在这个偏移范围内时,不会使 继电控制器改变输出值。
• 参数“偏差”(Deviation)指定了希望的过程变量围绕给 定值的峰-峰值波动量。
PLC-s7-200 实验
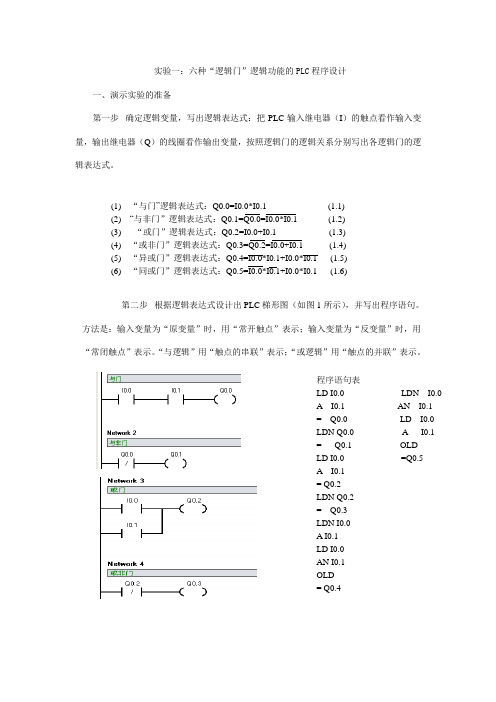
实验一:六种“逻辑门”逻辑功能的PLC程序设计一、演示实验的准备第一步确定逻辑变量,写出逻辑表达式:把PLC输入继电器(I)的触点看作输入变量,输出继电器(Q)的线圈看作输出变量,按照逻辑门的逻辑关系分别写出各逻辑门的逻辑表达式。
第二步根据逻辑表达式设计出PLC梯形图(如图1所示),并写出程序语句。
方法是:输入变量为“原变量”时,用“常开触点”表示;输入变量为“反变量”时,用“常闭触点”表示。
“与逻辑”用“触点的串联”表示;“或逻辑”用“触点的并联”表示。
程序语句表LD I0.0 LDN I0.0 A I0.1 AN I0.1 = Q0.0 LD I0.0 LDN Q0.0 A I0.1 = Q0.1 OLDLD I0.0 =Q0.5A I0.1= Q0.2LDN Q0.2= Q0.3LDN I0.0A I0.1LD I0.0AN I0.1OLD= Q0.4第三步:用电脑或手持编程器将以上所编程序送入PLC用户存储器中。
第四步:进行I/O分配,并接线调试。
为了接线简单起见,我们让六个“门”的输入接线相同,均为:开关K0 ─→I0.0,开关K1 ─→I0.11 (“─→”表示在两个端钮间连线);而输出接线分别为:COM1─→24V直流电源正极,COM2─→24V直流电源正极。
“与门”输出接线: Q0.0 ─→L0 (L0---L5为发光二极管指示灯)“与非门”输出接线:Q0.1 ─→L1“或门”输出接线: Q0.2 ─→L2“或非门”输出接线:Q0.3 ─→L3“异或门”输出接线:Q0.4 ─→L4“同或门”输出接线:Q0.5 ─→L5接线调试完毕,实验的准备工作即告结束。
二、演示实验的做法比如在做“与门”逻辑关系实验时,可按“与门”逻辑关系接线:K0 ─→I0.0K1 ─→I0.1K0─→L0,并设开关闭合为1,开关断开为0;指示灯亮为1,指示灯灭为0。
让学生观察开关K0、K1通断组合与指示灯L0亮灭的逻辑关系,并列出真值表,从而分析出是什么逻辑关系。
S7-200西门子PLC基础教程第5章 顺序设计方法中梯形图的编程方法

没有剪完C0设定的块数时,C0的常 闭触点闭合,将返回步M0.1,所以将两个 前级步M0.5和M0.7的常开触点和C0的常闭 触点串联,作为后续步M0.1置位和对前级 步M0.5和M0.7复位的条件。对应的梯形图 如图5-8所示。
图5-8
剪板机控制系统的梯形图
5.3 使用SCR指令的顺序 控制梯形图的编程方法 5.3.1 顺序控制继电器指令
加计数器C0是用来控制剪料的次数, 每次工作循环C0的当前值在步M0.7加1。 没有减完20块料时,C0的当前值小于设定 值20,其C0常闭触点闭合,即转换条件满 足,将返回步M0.1,重新开始下一周期的 工作。
当剪完20块板料后,C0的当前值等于 设定值20,C0常开触点闭合,即转换条件 满足,将返回到初始步M0.0,等待下一次 起动信号。
图5-7
转换的同步实现
5.2.4 应用设计举例
图5-4为剪板机的顺序功能图,用以转 换条件为中心编程方法绘制梯形图程序。
顺序功能图中共有9个转换(包括 SM0.1),转换条件SM0.1只需对初始步 M0.0置位。
除了与并行序列的分支、合并有关的 转换以外,其余的转换都只有一个前级步 和一个后级步,对应的电路块均由代表转 换实现的两个条件的触点组成串联电路, 一条置位指令和一条复位指令组成。
当M0.3步为活动步时,且剪刀下行到 位I0.2条件满足,同时使步M0.4与步M0.6 为活动步,使压钳和剪刀同时上行,这是 一个并行序列的分支开始,用M0.3· I0.2的 常开触点串联作为步M0.4与步M0.6的起动 条件。
当M0.4、M0.6均为活动步时,则步 M0.3变为不活动步,所以用M0.4或M0.6的 常闭触点与M0.3的线圈串联,作为关断 M0.3线圈的条件。
s7-200plc顺序控制梯形图的设计方法课件

2.某组合机床的动力头控制系统梯形图设计
s7-200plc顺序控制梯形图的设计方法
注意:使用这种编程方法时,不能将输出位的线 圈与置位指令和复位指令并联。因为图5-8中控 制置位、复位的串联电路连通的时间是相当短的, 只有一个扫描周期,转换条件满足后前级步马上 被复位,该串联电路断开,而输出位的线圈至少 应该在某一步对应的全部时间内接通。
5.1.1单序列编程方法
1. 锅炉的鼓风机和引风机梯形图设计 设计起保停电路的关键是它的启动条件和停 止条件。
s7-200plc顺序控制梯形图的设计方法
s7-200plc顺序控制梯形图的设计方法
2. 输出电路的设计方法 1)某一输出量仅在某一步中为ON,可将它的线 圈与对应步的存储器位(M0.2)的线圈并联。 2)某一输出在几步中都为ON,将代表各有关步 的存储器位的常开触点并联后,驱动该输出的线 圈。(M0.1~M0.3的常开触点并联驱动Q0.0的 线圈) 用存储器位来代表步具有概念清楚、编程规 范、梯形图易于阅读和查错等优点。
s7-200plc顺序控制梯形图的设计方法
装载顺序控制继电器(Load Sequence Control Relay)指令“LSCR s-bit” 用来表示一个SCR段(即 顺序功能图中的步)的开始。
顺序控制继电器结束(sequence Control Relay End)指令SCRE用来表示SCR段的结束。
第5章 顺序控制梯形图的设计方法
定义: 根据顺序功能图设计梯形图的方法。 方法: 1.使用起保停电路; 2.以转换为中心; 3.使用顺序控制继电器(SCR); 4.具有多种工作方式的系统。
s7-200plc顺序控制梯形图的设计方法
5.1 使用起保停电路设计顺序控制梯形 图的方法
s7-200 plc 顺序控制梯形图的设计方法

使用SCR时有如下的限制: 不能在不同的程序中使用相同的s位; 不能在SCR 段之间使用 JMP 及LBL指令,即不 允许用跳转的方法跳入或跳出SCR段; 不能在SCR段中使用FOR、NEXT和END指令。
• 5.3.2 单序列 编程方法 • 某小车运动的梯形图设计。
5.3.3 选择序列与并行序列编程
5.2.2 .3 使用SCR指令的顺序控制梯形图设计 方法
5.3.1顺序控制继电器指令 顺序控制继电器s专门用于编制顺序控制程序。
装 载 顺 序 控 制 继 电 器 (Load Sequence Control Relay) 指 令 “ LSCR s-bit” 用来 表 示一个 SCR 段(即顺序功能图中的步)的开始。 顺序控制继电器结束 (sequence Control Relay End)指令SCRE用来表示SCR段的结束。 顺序控制继电器转换 (sequence Control Relay Transition) 指令“ SCRT S-bit” 用来 表示 SCR 段之间的转换,即步的活动状态的转 换。
例:某机械手用来将工件从 A 点搬运到 B 点(图5-16),控制面板(图5-17),外部 接线图(图5-18)。
5.4.1 使用起保停电路的编程方法 • 1公用程序 • 功用:(见图5-20)自动程序和手动程序相 互切换的处理。 • 2手动程序(图5-21) • 3.自动程序 • 顺序功能图(图5-22) • 梯形图( 图5-23) • 4.自动回原点程序
2.某组合机床的动力头控制系统梯形图设计
注意:使用这种编程方法时,不能将输出 位的线圈与置位指令和复位指令并联。因 为图 5 - 8 中控制置位、复位的串联电路连 通的时间是相当短的,只有一个扫描周期, 转换条件满足后前级步马上被复位,该串 联电路断开,而输出位的线圈至少应该在 某一步对应的全部时间内接通。
西门子PLCS7-200图解教程

模块数目见表3.2。
S7-200 CPU存储器系统
S7-200 CPU存储器系统由RAM和EEPROM两种存储
器构成。 系统掉电时,自动将RAM中M存储器的有关内容保存到 EEPROM存储器。
3.1.2 扫描周期及工作方式
写输出
读输入
一个扫描周 期 执行CPU自诊断 执 行 程 序 处理通讯请求
5. 特殊标志位(SM)存储器
CPU 224编址范围SM0.0 ~SM179.7,共180个字节。其中SM0.0~SM29.7
的30个字节为只读型区域。 ① SMB0为状态位字节,在每次扫描循环结尾由S7-200 CPU更新,定义如下: SM0.0 RUN状态监控,PLC在运行RUN状态,该位始终为1。 SM0.1 首次扫描时为1,PLC由STOP转为RUN状态时,ON(1态)一个扫描周期,用 于程序的初始化。 SM0.2 当RAM中数据丢失时,ON一个扫描周期,用于出错处理。 SM0.3 PLC上电进入RUN方式,ON一个扫描周期。 SM0.4 分脉冲,该位输出一个占空比为50%的分时钟脉冲。用作时间基准或简易延时。 SM0.5 秒脉冲,该位输出一个占空比为50%的秒时钟脉冲。可用作时间基准。 SM0.6 扫描时钟,一个扫描周期为ON(高电平),另一为OFF(低电平)循环交替。 SM0.7 工作方式开关位置指示,0为TERM位置,1为RUN位置。为1时,使自由端口 通讯方式有效。 ② SMB1为指令状态位字节,常用于表及数学操作,部分位定义如下: SM1.0 零标志,运算结果为0时,该位置1。 SM1.1 溢出标志,运算结果溢出或查出非法数值时,该位置1 。 SM1.2 负数标志,数学运算结果为负时,该位为1。
S7-200PLC的基本指令及程序设计

15
5.6 S7-200 PLC的基本指令
I0.0
触点地址编号
1)外接输入电路闭合时,输入映像
寄存器为“1”状态,梯型图中对应
常开触点
的“-| |-”接通,“-|/|-”断开。 2)外接输入电路断开时,输入映像
I0.1
触点地址编号
寄存器为“0”状态,梯型图中对应 的 “-| |-” 断开, “-|/|-”
5.3 编程元件
1、输入/输出继电器(I/Q)
(1)即输入映像寄存器(I)
PLC的输入端子
输入映像寄存器(I)的相应位。输
入映像寄存器的状态只能由外部输入信号驱动,而不能在内部
由程序指令来改变。 位地址:I[字节地址].[位地址],如I0.1; 字节、字、双字地址: I[数据长度] [起始字节地址],
精选ppt课件
10
2、辅助继电器(M) 内部标志位存储器(M)也称内部线圈,是模拟继电器控制
系统中的中间继电器,它存放中间操作状态,或存储其它相关 数据。如M26.7,MB11,MW23,MD26。
3、变量存储器(V) 变量存储器(V)存放全局变量、存放程序执行过程中控制
逻辑操作的中间结果或其他相关数据。变量存储器全局有效。 全局有效是指同一个存储器可以在任一程序分区(主程序、子
闭合。
常闭触点
I0.0 Q0.0
( ) 线圈地址编号
3)梯形图中某一个线圈“通电”时, 对应的输出映像寄存器的位为“1”, 对应外部的负载通电工作。
标准线圈
4)梯形图中某一个线圈“断电”时, 对应的输出映像寄存器的位为“0”,
对应外部的负载断电,停止工作。
精选ppt课件
16
5.6.1 位逻辑指令
PLC编程:梯形图程序设计基础
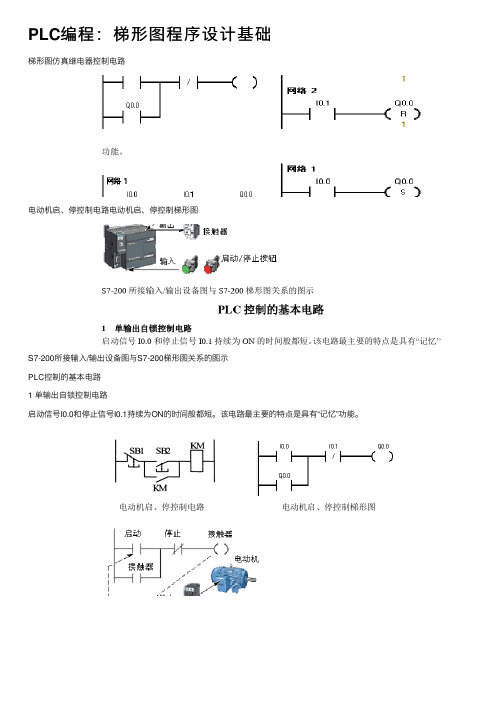
PLC编程:梯形图程序设计基础梯形图仿真继电器控制电路电动机启、停控制电路电动机启、停控制梯形图S7-200所接输⼊/输出设备图与S7-200梯形图关系的图⽰PLC控制的基本电路1 单输出⾃锁控制电路启动信号I0.0和停⽌信号I0.1持续为ON的时间般都短。
该电路最主要的特点是具有“记忆”功能。
多地控制2 多输出⾃锁控制电路(置位、复位)多输出⾃锁控制即多个负载⾃锁输出,有多种编程⽅法,可⽤置位、复位指令3 单向顺序启\停控制电路1. 单向顺序启动控制电路是按照⽣产⼯艺预先规定的顺序,在各个输⼊信号的作⽤下,⽣产过程中的各个执⾏机构⾃动有序动作。
只有Q0.0启动后,Q0.1⽅可启动,Q0.2必须在Q0.1启动完成后才可以启动。
2. 单向顺序停⽌控制电路就是要求按⼀定顺序停⽌已经执⾏的各机构。
只有Q0.2被停⽌后才可以停⽌Q0.1,若想停⽌Q0.0,则必须先停⽌Q0.1。
I0.4为急停按钮。
4 延时启\停控制电路1.延时启动控制设计延时启动程序,要利⽤中间继电器(内部存储器M)的⾃锁状态使定时器能连续计时。
定时时间到,其常开触点动作,使Q0.0动作。
2.延时停⽌控制定时时间到,延时停⽌。
I0.0为启动按钮、I0.1为停⽌按钮。
3.延时启\停控制电路该电路要求有输⼊信号后,停⼀段时间输出信号才为ON;⽽输⼊信号0FF后,输出信号延时⼀段时间才OFF。
T37延时3 s作为Q0.0的启动条件,T38延时5 s作为Q0.0的关断条件。
5 超长定时控制电路S7-200 PLC中的定时器最长定时时间不到1 h,但在⼀些实际应⽤中,往往需要⼏⼩时甚⾄⼏天或更长时间的定时控制,这样仅⽤⼀个定时器就不能完成该任务。
下例表⽰在输⼊信号I0.0有效后,经过10 h 30 min 后将输出Q0.0置位。
T37每分钟产⽣⼀个脉冲,所以是分钟计时器。
C21每⼩时产⽣⼀个脉冲,故C21为⼩时计时器。
当10 h计时到时,C22为ON,这时C23再计时30 min,则总的定时时间为10 h 30 min,Q0.0置位成ON。
S7-200 PLC程序设计方法

图5-35 虚拟步的设 置
3.常闭触点提供的输入信号的处 理
· 在继电器-接触器控制电路中, 热继电器的常 闭触点与接触器的线圈串联。在图5-15中, 使用的却是热继电器 对应的常开触点I0.5, 对于熟悉继电器电路的人来说, 这是很不 习惯的。因此建议尽可能使用常开触点作为PLC的输入信号, 使 继电器电路与对应的梯形图电路中的触点的常开、常闭类型一致 。
图5-20 顺序功能图示 例
图5-21 单一序 列
图5-22 选择序 列
图5-23 并行序 列
5.4.2 顺序功能图的实现
1. 单一序列(单流程)的编程方法 2. 选择序列的编程方法 3. 并行序列的编程方法
1.单一序列(单流程)的编程方 法
1 使用辅助继电器实现顺序控制 2 使用顺序控制继电器指令实现顺序控制
·3)串联级联结构: 如果第一个方框指令评估成功,电 流顺着网络流至第二个方框指令,则可在网络的同一级上将多条ENO指令用串 联方式级联。如果任何指令失败,剩余的串联指令不会执行,使能位停止。
·4)串联及并联技巧: 串联多的支路应尽量放在上部,并联电 路块应尽量靠近母线。
图5-3 串联技 巧
图5-4 并联技 巧
5.4 顺序控制设计法
· 5.4.1 顺序功能图的组成 · 5.4.2 顺序功能图的实现 · 5.4.3 顺序功能图的注意事项
5.4.1 顺序功能图的组成
· 1.工步 · 2.驱动处理(动作
) · 3.有向线段 · 4.转移条件
顺序功能图主要有以下三种基本形式:
单一序列(单流程) 选择序列 并行序列
2.电动机点动起停控制
表5-2 电 动 机 点 动 起 停 控 制 程 序 地 址 分 配表
PLCS7-200立体车库毕业设计(带有上位机及梯形图程序)
学校代码:学号:毕业论文(设计) BACH ELOR DISSERTATION论文题目:基于PLC立体车库控制系统的设计学位类别:工学学士学科专业:自动化1班作者姓名:导师姓名:完成时间:基于PLC的立体车库控制系统的设计中文摘要随着我国经济的飞速发展,城市人口日益增多,特别是随着改革开放以来,我国进入了汽车拥有率迅速上升时候。
以往那种单层平面停车场也越来越不能满足市场的需求。
对多停车位、少占空间、使用操作简单、安全可靠的“立体停车库”的建设,是解决目前寸土寸金的大都市内停车难的有效办法。
本设计基于PLC控制,同时利用下位机与上位机通讯,在上位机上进行实时监控立体车库运行,升降横移立体停车库车位结构为M*N的2维矩阵形式,M为层,N为列,可设计为多层、多列。
现在设计为3层*3列车库。
本设计软件部分是基于SETP7 Micro/WIN开发环境,采用梯形图进行程序编写。
硬件部分是基于上位机MCGS组态环境及下位机硬件试验箱完成的。
毕业设计结果表明:该系统可以实现空车车位号的LED显示,并且LED显示实现了优先选择空车位的功能,即1号车位优先于2号、2号优先于3号,以此类推。
上位机上可以实现车位的升降横移功能。
关键词:PLC;立体车库;组态软件;S7-200;监控系统The design of general multi-layered fluctuation three-dimensional garagecontrol system based on PLCABSTRACTWith the rapid development of China's economy,increasing urban population, especially with the reform and opening up, China has entered a rapid increase in car ownership in time. Single-plane parking lot in the past that can not meet market demand. On more parking spaces, less space, use a simple, safe and reliable "parking" of the building, is solve the high cost of land within the city parking is difficult and effective way.The design is based on PLC control, while use of lower computer and the host computer communication, the host computer on a real-time monitoring parking operation, lifting and transferring parking parking structure for the M * N 2-dimensional matrix, M for the layer, N is the column can be designed for the multi-layer, multi-column.Now is designed to 3 * 3. Part of this design software is based on SETP7 Micro / WIN development environment for programming using ladder. Hardware configuration is based on PC MCGS environment and lower computer hardware test chamber complete.Graduation results show that: the system can empty parking space number LED display and LED display of the priority function of empty parking spaces, that parking space No. 1 priority 2, priority 2, 3, and so on. PC can be achieved on the function of lifting and transferring of parking spaces.Keywords: PLC; parking; configuration software;S7-200;Monitoring System目录第一章前言 (1)1.1本课题研究的主要意义 (1)1.2 发展的现状及前景展望 (1)1.3本课题的主要任务及结构组织 (3)第二章立体车库系统设计 (5)2.1 立体车库系统功能设计 (5)2.2 立体车库系统结构的设计 (5)2.3 系统方案设计及选择 (6)2.3.1方案的设计 (6)2.3.2 方案的选择 (7)第三章立体车库的软件系统设计及实现 (7)3.1 PLC概述 (7)3.1.1 PLC的基本结构 (9)3.1.2 PLC的编程语言 (12)3.2 西门子S7-200 (16)3.3 STEP7-Micro/WIN软件的使用及编程规则 (16)3.3.1 STEP7-Micro/WIN的使用 (16)3.3.2 STEP7-Micro/WIN的编程规则 (19)3.4 软件系统设计 (19)3.4.1 输入输出分配表 (19)3.4.2 I/O接线图 (20)3.4.3 顺序功能图 (20)3.4.4 梯形图 (21)第四章立体车库的硬件设计及实现 (22)4.1 MCGS组态软件的介绍 (22)4.2 MCGS组态设计 (24)4.2.1 用户窗口设计 (24)4.2.2 设备窗口设计 (25)4.2.3实时数据库 (28)4.2.4 组态画面与下位机关联 (29)4.3 硬件实验箱设计 (31)第五章立体车库系统的调试与分析 (32)5.1 调试结果及分析 (32)5.2 出现的问题及解决方法 (33)第六章结束语及展望 (33)参考文献 (34)致谢 (35)附录(梯形图) (36)第一章前言1.1本课题研究的主要意义自动化立体车库系统是指在不需要人工干预的情况下,运输设备能自动存储和取出车辆的多层车库存储系统。
plc梯形图程序设计基础
包头钢铁职业技术学院
4.2.2 梯形图仿真继电器控制电路
可 编 程 控 制 技 术 与 应 用
电动机启、停控制电路
电动机启、停控制梯形图
S7-200所接输入/输出设备图 与S7-200梯形图关系的图示
包头钢铁职业技术学院
梯形图中的基本编程元素:触点、线圈和方框 可 编 程 控 制 技 术 与 应 用 触点: 代表逻辑控制条件。触点闭合时表示能量可以流过。触
包头钢铁职业技术学院
4.1 语言与结构
可 编 程 控 制 技 术 与 应 用 4.1.1 编程语言 S7-200 PLC有两种指令集:IEC 1131-3指令集 SIMATIC指令集。 IEC1131-3指令集:国际电工委员会(IEC)制定的PLC国 际标准1131-3 ProgrammingLanguage(编程语言)中推荐的 标准语言。 SIMATIC指令集:西门子公司为S7-200 PLC设计的编 程语言。 本章着重介绍SIMATIC指令集。
可 编 程 控 制 技 术 与 应 用
包头钢铁职业技术学院
(2)梯形图中流过的是“能流”,它只能从左到右、自上 而下流动。“能流”不允许倒流。能流到,线圈则接通。能 流是用户程序运算中满足输出执行条件的形象表示方式。继 电器控制系统中的电流是不受方向限制的,导线连接到哪里, 电流就可流到那里。 (3)梯形图中的常开、常闭触点不是现场物理开关的触点。 它们对应输入、输出映像寄存器或数据寄存器中的相应位的 状态,而不是现场物理开关的触点状态。因此在梯形图中同 一元件的一对常开、常闭触点的切换没有时间的延迟,常开 常闭触点只是互为相反状态。而继电器控制系统大多数的电 器是属于先断后合型的电器。
包头钢铁职业技术学院
4.1.2 用户程序的结构
梯形图程序的设计方法
第5章 梯形图程序的设计方法
7.电动机正反转控制电路
外部接线图
停止按钮
异步电动机正反转控制电路
自锁
梯形图
联锁
互锁
第5章 梯形图程序的设计方法
5.2 梯形图的经验设计法
在PLC开展的初期,一般采用经验设 计法来设计梯形图。
所谓经验设计法,是指设计人员根据 被控对象对控制系统的具体要求,对一 些典型电路进行组合、修改和完善来完 成梯形图设计的方法。这种方法无普遍 规律可循,需要屡次反复调试和修改, 设计所需的时间和设计的质量决大局部 取决于设计者的经验。
⑵定时器与计数器配合延时
如右以下图,其总的延时为两 个设定值之积:t=t0×c0。
总延时:60×60=3600秒。
两个定时器延时 定时器与计数器配合延时
第5章 梯形图程序的设计方法
5.大容量计数电路
FX2N系列PLC中16位计数器 最大计数范围为32767,当计数 值远远大于该值时,可采用32位 计数器,也可将两个16位计数器 串级相连,得到一个大容量计数 值。
个扫描周期的一系列脉冲。
FX2N系列PLC中16位计数器最大计数范围为32767,当计数值远远大于该值时,可采用32位计数器,也可将两个16位计数器串级相连,
右限位开关 得到一个大容量计数值。
转移:表示从一个步向另一个步的变化。
X4
梯形图在黑板上板书
第5章 梯形图程序的设计方法
5.3 梯形图的顺序控制设计法
X1 左行输出控制
Y1
停止按钮 X2 制动控制 Y2 步是根据输出量的状态变化来划分的,在任何一步之内,各输出量的状态是不变的,但相邻两步的输出量总有不同之处。
第章梯形图程序的设计方法 第5章 梯形图程序的设计方法
定时器、计数器简单电路编程及梯形图的经验设计法

TON T××,PT
TONR T××,PT
TOF T××,PT
2. 时基 按时基脉冲分,则有1ms、10ms、100ms 三种定时器。不同的时基标 准,定时精度、定时范围和定时器刷新的方式不同。 (1)定时精度和定时范围。 定时器的工作原理是:使能输入有效后,当前值PT对PLC内部的时基 脉冲增1计数,当计数值大于或等于定时器的预置值后,状态位置1。 其中,最小计时单位为时基脉冲的宽度,又为定时精度; 从定时器输入有效,到状态位输出有效,经过的时间为定时时间, 即:定时时间=Байду номын сангаас置值×时基。 当前值寄存器为16bit,最大计数值为32767,由此可推算不同分辨率 的定时器的设定时间范围。CPU 22X系列PLC的256个定时器分属TON (TOF)和TONR工作方式,以及3种时基标准,如表4-4所示。 可见时基越大,定时时间越长,但精度越差。
设: 输入信号:I0.0为故障信号;I0.1为消铃按钮;I0.2为试灯、 试铃按钮 输出信号:Q0.0为报警灯;Q0.1为报警电铃
设计小车自动往返运动的梯形图
正次品分拣机编程实训
控制要求 (1)用启动和停止按钮控制电动机M运行和停止。在电动机运行时, 被检测的产品(包括正次品)在皮带上运行。 (2)产品(包括正、次品)在皮带上运行时,S1(检测器)检测到 的次品,经过5s传送,到达次品剔除位置时,起动电磁铁Y驱动剔除 装置,剔除次品(电磁铁通电1s),检测器S2检测到的次品,经过 3s传送,起动Y,剔除次品;正品继续向前输送。正次品分拣操作流 程如图4-51所示。
表4-4 定时器的类型
工作方式
时基(ms) 1 TONR 10 最大定时范围(s) 32.767 327.67 定时器号 T0,T64 T1-T4,T65-T68
s7-200系列PLC基本指令

2.语句表(Statement List)设计语言 语句表( 语句表 )
语句表是用助记符来描述程序的一种设计 语言。 语言。 语句表设计语言具有下列特点: 语句表设计语言具有下列特点: 语句表.doc 第3章\语句表 章 语句表
顺序功能流程图( 3.顺序功能流程图(Sepuential 顺序功能流程图 Function Chart)程序设计 )
4.功能块图(Function Block 功能块图( 功能块图 Diagram)程序设计语言 )
功能块图设计语言是用逻辑门电路表 示的程序设计语言。功能块图指令由输入、 示的程序设计语言。功能块图指令由输入、 输出端及逻辑关系函数组成。 输出端及逻辑关系函数组成。
第3章\002.doc
4.2 基本位逻辑指令与应用
I0.0
OFF
I0.1
OFF
Q0.0
(OFF )
输出映像寄存器
Q0.0
OFF
LD O AN =
I0.0 Q0.0 I0.1 Q0.0
起动 I0.0 停止 I0.1
Q0.0
Q0.0
输入映像寄存器
0 CPU224
I0.0 I0.1
0 1
SB1 SB2
I0.0 I0.1
1L
AC220V
1M 2M L+
KM
顺序功能流程图是近年来发展起来的一种程序设计 语言。 语言。采用顺序功能流程图描述的控制系统被分为若干 个子系统,从功能入手进行设计, 个子系统,从功能入手进行设计,使系统的操作具有明 确的含义,便于设计人员和操作人员设计思想沟通, 确的含义,便于设计人员和操作人员设计思想沟通,便 于程序的分工设计与检查调试。 于程序的分工设计与检查调试。顺序功能流程图的主要 元素是步、转移、转移条件和动作。如下图所示。 元素是步、转移、转移条件和动作。如下图所示。顺序 功能流程图程序设计的特点是: 功能流程图程序设计的特点是: 第3章\001.doc
梯形图程序的设计方法s7-200

作者 贺娟
四、长延时电路
S7-200系列可编程控制器的定时器最长定时时间为3276.7s, 要设定更长的时间,需要用户自己设计长延时电路。 1、定时器“接力”电路
用N个定时器串级“接力”延时,达到长延时的目的,电路总 的延时时间为各个定时器设定值之和,所能达到的最大延时时 间为3276.7×N秒。 I0.1 I0.0 M0.0
X2
X1
Y1
X3 Y0
左行
X0: 左行启动按钮 X1: 右行启动按钮 X2: 停止按钮
X2
X0
Y0
X4 Y1
右行
X3: 左行程开关 X4: 右行程开关
M100
屏蔽 X5 Y2 Y1
X5: 右中行程开关
装料
K100
Y0: 左行 Y1: 右行 Y2: 装料 Y3: 卸料
T0 Y3
T1
X5 X4 X5 M100 Date: 2017/5/2
Date: 2017/5/2
Page: 18
作者 贺娟
I0.0
M0.0
(S)
M0.1
T39 TON IN 90 PT 100ms T40 TON IN 80 PT 100ms Q0.0 ( ) T39 M0.1 Q0.1 ( ) Q0.2 ( )
I0.1
M0.1 (S) M0.0 (R) T37 TON IN
I0.0 M0.1 ( M0.0 ) M0.1 ) M0.2 ) Q0.0 ) I0.0 M0.0 M0.1 M0.2 Q0.0
I0.0
( M0.0 M0.0 Q0.0 Q0.0 (
M0.2
(
(a) 梯形图
(b) 时序图
图6-7 分频电路
Date: 2017/5/2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M0.0
Q0.0
I0.0
P Q0.0
M0.0 ( ) M0.1 ( )
M0.0
2、用置位复位指令构成二分频 电路
M0.0
M0.1
Q0.0 ( S ) 1 Q0.0 ( R ) 1
图4 -44 习题10梯形图程序
Date: 2018/10/23 Page: 10
作者 贺娟
3、用多个辅助继电器构成二分频电路
作者 贺娟
四、长延时电路
S7-200系列可编程控制器的定时器最长定时时间为3276.7s, 要设定更长的时间,需要用户自己设计长延时电路。 1、定时器“接力”电路
用N个定时器串级“接力”延时,达到长延时的目的,电路总 的延时时间为各个定时器设定值之和,所能达到的最大延时时 间为3276.7×N秒。 I0.1 I0.0 M0.0
第七章 梯形图程序的设计方法
7.1
梯形图的分析设计法 顺序控制设计法
7.2
Date: 2018/10/23
Page: 1
7.1 梯形图的分析设计法
梯形图的典型环节
一、启动、保持和停止电路
I0.0 Q0.1 ( Q0.0 Q0.0 )
图6-1 启保停电路
设在可编程控制器的I0.0和I0.1两个输入端接有两个常开按钮SB1和SB2, 则针对梯形图6-1而言SB1为系统的启动按钮,SB2为系统的停止按钮。 Q0.0的常开触点为自保持电路。
Date: 2018/10/23 Page: 2
作者 贺娟
绘图时应注意PLC外部所接“输入信号”的触点状态与
梯形图中所采用内部输入触点(X编号的触点)的关系!
SB1
SB2 SB1 SB2
SB1 SB2
Date: 2018/10/23
Page: 3
作者 贺娟
二、延时接通、延时断开电路
方法一:用两个接通延时定时器实现。
用一个按钮 实现单按钮控制功能
I0.0 P C9 M0.0 M0.1 C9 CU CTU M0.0 ( ) M0.1 ( )
R
2 M0.0 C9 Q0.0 ( )
Q0.0
图6-8 利用计数器实现单按钮控制功能
Date: 2018/10/23 Page: 12
( )
M0.0
M0.0 T38 20000 IN PT T39 16000 T39 Q0.0 ( ) 作者 贺娟 IN PT
X0用于启动延时电路, M0.0自保持,经过 2000s+1600s=3600s=1h 后Y0为ON。
TON
100ms TON
T38
100ms
Date: 2018/10/23
Page: 7
图6-6 定时器“接力”延时电路
2、定时器与计数器配合使用
I0.0
T38 IN T38 TON
18000
T38 C9 CU CTU I0.0 R 21 C9 ( (a) 梯形图 Q0.0 )
PT
100ms
此电路有无问题? 怎么改?
I0.0 Q0.0 10.5h
延时时间=60s60=3600s
(b) 时序图
Date: 2018/10/23 Page: 5
作者 贺娟
三、振荡电路
I0.0 T39 IN T39 IN 60 T38 PT Q0.1 ( ) (a) 梯形图 30 TON 100ms PT T38 TON 100ms
T38
T38 3S 6S
Q0.1
(b) 时序图
图6-4 振荡电路
Date: 2018/10/23 Page: 6
(b) 时序图
图6-3 用一个TON和一个TOF实现的延时接通/延时断开电路 电路中输入信号I0.0的为ON后,T38开始计时,6s后T38的位为ON,T38 常开触点接通使断开延时定时器T39的线圈通电,T39为ON,其常开触 点闭合使Q0.1有输出;I0.0为OFF后,T38常开触点断开使T39线圈断电 并开始计时,9s后T39变为OFF,T39常开触点断开使Q0.1变为OFF。
Date: 2018/10/23 Page: 4
作者 贺娟
方法二:用一个接通延时定时器和一个断开延时定时器实 现
I0.0 60 T38 90 T39 T38 IN PT IN PT Q0.1 ( ) TON 100ms I0.0 Q0.1 6S T38 T39 9S
T39
TOF 100ms
(a) 梯形图
I0.0 M0.1 ( M0.0 ) M0.1 ) M0.2 ) Q0.0 ) I0.0 M0.0 M0.1 M0.2 Q0.0
I0.0
( M0.0 M0.0 Q0.0 Q0.0 (
M0.2
(
(a) 梯形图
(b) 时序图
图6-7 分频电路
Date: 2018/10/23
Page: 11
作者 贺娟
六、单按钮启动、停止电路
I0.0 T38
IN T39 60 PT Q0.1 ( ) I0.0 90 (a) 梯形图 IN PT TON 100ms T39 TON 100ms I0.0 Q0.1 6S
T38 Q0.1
9S
T38
T39
(b) 时序图
图6-2 用两个TON实现的延时接通/延时断开电路
电路中X0为ON后T0开始计时。6s后T0常开触点接通,Y0为 ON并保持。X0为OFF后T6开始计时,9S后T6常闭触点断开, 使Y0为OFF,T6亦被复位。
作者 贺娟
方法二:利用最基本的逻辑指令来实现单按钮控制功能
I0.0 M0.0
P
M0.0 Q0.0
(
)
Q0.0
( Q0.0
)
M0.0
图6-9 利用最基本的逻辑指令实现单按钮控制功能
Date: 2018/10/23
Page: 13
作者 贺娟
七、电动机正反转控制电路
I0.0
I0.1 I0.2
接触器辅助 常闭触点的 互锁
Q0.0
Q0.1
I0.0 M0.0 I0.1 M0.1
I0.2
I0.1
M0.1
M0.0 ( )
电气互锁
I0.2 I0.0 M0.0 M0.1 ( )
机械互锁
M0.0
T38 M0.1 T39 Q0.1 ( ) Page: 14 t2
T38 IN TON 100ms T39 IN PT TON 100ms
图6-5 计数器对定时范围的扩展
Date: 2018/10/23 Page: 8
作者 贺娟
思 考
如何实现如下图所示周期为50s的脉冲输出?
I0.0 I0.1
Q0.0
Date: 2018/10/23
Page: 9
作者 贺娟
四、分频电路
1、用边沿检测触点构成二分频电路
I0.0 Q0.0
M0.0
I0.0