行车视距课件
合集下载
汽车的制动性、行车视距及其保证 PPT课件 ppt课件
在视距曲线与轨迹线之 间的空间范围,应保证通 视,障碍物予以清除。
ppt课件
27
(二)横净距及其计算(了解)
横净距 h :在弯道各点的横断面上,驾驶员视点轨迹线 与视距曲线之间的距离。
1.不设缓和曲线的横净距计算:
(1)L>S:
h Rs Rs cos
Rs (1 cos ) 2 2
L
180
Rs
ppt课件
29
2.设缓和曲线的横净距计算:
(1)圆曲线长L′>S:
h Rs (1 cos ) 2
(2)曲线总长L>S>L′
h Rs (1 cos
2
2
) (l l ' ) sin( ) 2
l l' l' 2 arctg { [1 ( ) ]} 6RS l l
ppt课件 17
2.超车汽车在对向车道上行驶的距离S2:
V S2 t2 3.6
V---超车汽车的速度(km/h). t2---在对向车道上的行驶时间(s).
3.超车完成后,超车汽车与对向汽车之间的安全距离S3: S3=15~100m
ppt课件 18
4.超车汽车从开始加速到超车完对向汽车行驶距离S4:
ppt课件
16
超车视距的全程可分为四个阶段: 1.加速行驶距离S1:
当超车汽车经判断认为有超车的可能,便加速行驶移向对向车 道,在进入该车道之前的行驶距离为S1:
S1
1 t1 at12 3.6 2
V0
V0——被超汽车的速度(km/h); t1——加速时间(s); a——平均加速度(m/s2)。
第14讲 行车视距5-3
第六节
行车视距及其保证
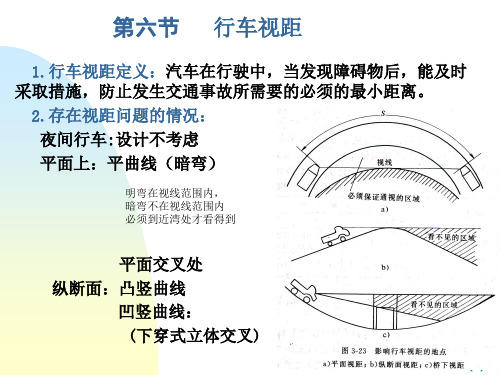
1.行车视距定义:汽车在行驶中,当发现障碍物 后,能及时采取措施,防止发生交通事故所需要的必 须的最小距离。 2.存在视距问题的情况: 平面上:平曲线(暗弯)
纵断面:凸竖曲线 凹竖曲线:(下穿式立 体交叉)
3.行车视距分类:
(1)停车视距:汽车行驶时,自驾驶人员看到前 方障碍物时起,至到达障碍物前安全停止,所需的最 短距离。 (2)会车视距:在同一车道上两对向汽车相遇, 从相互发现时起,至同时采取制动措施使两车安全停 止,所需的最短距离。 (3)错车视距:在没有明确划分车道线的双车道 道路上,两对向行驶的汽车相遇,发现后即采取减速 避让措施安全错车所需的最短距离。 (4)超车视距:在双车道公路上,后车超越前车 时,从开始驶离原车道之处起,至可见逆行车并能超 车后安全驶回原车道所需的最短距离。
(二)视距曲线
驾驶员视点轨迹线每隔一定间隔绘出一系列与视 线相切的外边缘线。
AB是行车轨迹线,从汽车行驶轨迹线上的不同位置(图中的1、2、3、…各 点)引出一系列视线(图中的1-1’、1-2’、3-3’…),它们的弧长都等于视 距S,与这些线相切的曲线(包络线)称为视距曲线。
(三)最大横净距及其计算
(2)清除距离视点轨迹线小于最大横净距的障碍物。 适用:分散障碍物,如独立建筑物等 。
h1 h2
h3
(四)保证行车视距的工程措施:
1.清除障碍物: (1)清除视距包络曲线与视点轨迹线间的全部障碍物。 适用:连续障碍物的清除,如路堑边坡等。
(2)清除距离视点轨迹线小于最大横净距的障碍物。 适用:分散障碍物,如独立建筑物等 。
(1)加速行驶距离S1 当超车汽车经判断认为有超车的可能,于是加速行 驶移向对向车道,在进入该车道之前所行驶距离为 S1: 1 2 V0
行车视距及其保证
1.行车视距定义:汽车在行驶中,当发现障碍物 后,能及时采取措施,防止发生交通事故所需要的必 须的最小距离。 2.存在视距问题的情况: 平面上:平曲线(暗弯)
纵断面:凸竖曲线 凹竖曲线:(下穿式立 体交叉)
3.行车视距分类:
(1)停车视距:汽车行驶时,自驾驶人员看到前 方障碍物时起,至到达障碍物前安全停止,所需的最 短距离。 (2)会车视距:在同一车道上两对向汽车相遇, 从相互发现时起,至同时采取制动措施使两车安全停 止,所需的最短距离。 (3)错车视距:在没有明确划分车道线的双车道 道路上,两对向行驶的汽车相遇,发现后即采取减速 避让措施安全错车所需的最短距离。 (4)超车视距:在双车道公路上,后车超越前车 时,从开始驶离原车道之处起,至可见逆行车并能超 车后安全驶回原车道所需的最短距离。
(二)视距曲线
驾驶员视点轨迹线每隔一定间隔绘出一系列与视 线相切的外边缘线。
AB是行车轨迹线,从汽车行驶轨迹线上的不同位置(图中的1、2、3、…各 点)引出一系列视线(图中的1-1’、1-2’、3-3’…),它们的弧长都等于视 距S,与这些线相切的曲线(包络线)称为视距曲线。
(三)最大横净距及其计算
(2)清除距离视点轨迹线小于最大横净距的障碍物。 适用:分散障碍物,如独立建筑物等 。
h1 h2
h3
(四)保证行车视距的工程措施:
1.清除障碍物: (1)清除视距包络曲线与视点轨迹线间的全部障碍物。 适用:连续障碍物的清除,如路堑边坡等。
(2)清除距离视点轨迹线小于最大横净距的障碍物。 适用:分散障碍物,如独立建筑物等 。
(1)加速行驶距离S1 当超车汽车经判断认为有超车的可能,于是加速行 驶移向对向车道,在进入该车道之前所行驶距离为 S1: 1 2 V0
行车视距的概念标准和措施课件
车速
车速也是影响行车视距的重要因素。在高速行驶时,驾驶员的视距会相对较短, 因为车辆需要更多的时间来响应和避免障碍物。因此,在高速行驶时,驾驶员需 要更加注意前方路况,以确保安全行驶。
03
行车视距的措施
改善道路条件
03
道路宽度
道路标线
道路照明
增加道路宽度可以减少车辆之间的干扰, 提高行车视距。
清晰、标准的道路标线有助于驾驶员判断 路况和保持行车视距。
的认识,增强安全意识。
推广安全驾驶理念
积极推广安全驾驶理念,倡导文 明行车,让驾驶员自觉遵守行车
视距规定,保障交通安全。
鼓励社会监督
鼓励社会各界对行车视距问题进 行监督和关注,形成全社会共同 参与交通安全管理的良好氛围。
THANKS
驾驶员培训与教育
安全驾驶培训
通过安全驾驶培训,教授 驾驶员如何保持行车视距 、正确判断路况和应对紧 急情况。
驾驶员考核
将行车视距作为驾驶员考 核的重要指标,提高驾驶 员对保持行车视距的重视 程度。
宣传教育
通过宣传教育,提高驾驶 员的安全意识,使其更加 注重保持行车视距。
04
行车视距在交通安全中的 作用
良好的道路照明可以提高夜间和低光环境 下的行车视距。
提升车辆性能
车辆安全性能
提高车辆的安全性能,如安装防 抱死刹车系统、稳定性控制系统 等,可以提升车辆在紧急情况下
的行车视距。
车灯升级
升级车辆的照明系统,如使用LED 车灯,可以提高夜间行车视距。
盲区监测系统
安装盲区监测系统可以帮助驾驶员 了解盲区内的路况,提高行车安全 性。
在双向行驶的道路上,两车相 向而行时,为了确保安全会车
的距离。
车速也是影响行车视距的重要因素。在高速行驶时,驾驶员的视距会相对较短, 因为车辆需要更多的时间来响应和避免障碍物。因此,在高速行驶时,驾驶员需 要更加注意前方路况,以确保安全行驶。
03
行车视距的措施
改善道路条件
03
道路宽度
道路标线
道路照明
增加道路宽度可以减少车辆之间的干扰, 提高行车视距。
清晰、标准的道路标线有助于驾驶员判断 路况和保持行车视距。
的认识,增强安全意识。
推广安全驾驶理念
积极推广安全驾驶理念,倡导文 明行车,让驾驶员自觉遵守行车
视距规定,保障交通安全。
鼓励社会监督
鼓励社会各界对行车视距问题进 行监督和关注,形成全社会共同 参与交通安全管理的良好氛围。
THANKS
驾驶员培训与教育
安全驾驶培训
通过安全驾驶培训,教授 驾驶员如何保持行车视距 、正确判断路况和应对紧 急情况。
驾驶员考核
将行车视距作为驾驶员考 核的重要指标,提高驾驶 员对保持行车视距的重视 程度。
宣传教育
通过宣传教育,提高驾驶 员的安全意识,使其更加 注重保持行车视距。
04
行车视距在交通安全中的 作用
良好的道路照明可以提高夜间和低光环境 下的行车视距。
提升车辆性能
车辆安全性能
提高车辆的安全性能,如安装防 抱死刹车系统、稳定性控制系统 等,可以提升车辆在紧急情况下
的行车视距。
车灯升级
升级车辆的照明系统,如使用LED 车灯,可以提高夜间行车视距。
盲区监测系统
安装盲区监测系统可以帮助驾驶员 了解盲区内的路况,提高行车安全 性。
在双向行驶的道路上,两车相 向而行时,为了确保安全会车
的距离。
行车视距(城市道路中)~
3.6 行车视距
(第9讲)
教学内容: ➢1. 行车视距的概念 ➢2. 行车视距的计算方法及标准 ➢3. 行车视距的保证
重点解决的问题: 1. 各级公路执行的行车视距的指标分别是什么? 2. 如何保证各级公路在平曲线内的行车视距?
3.6 行车视距
1.定义:行车视距是指汽车在行驶中,当发现障碍物后,能及时采取措 施,防止发生交通事故所需要的必须的最小距离。
其值可根据视距S和曲线长L、行车轨迹曲线半径RS算出。
(2)最大横净距计算方法:
▪ 1)不设回旋线的横净距计算:
▪ ①曲线长L>视距S:
h
Rs
Rs
cos
2
Rs (1
cos
)
2
180 S Rs
视点轨迹线
▪式中:Rs——驾驶员视点轨迹线半径,
Rs
R
B 2
1.5
②曲线长L<视距S:
▪ 横净距:在弯道各点的横断面上,驾驶员视点轨迹线与视距线之间的 最大距离叫横净距。
▪ 驾驶员视点位置:
➢ ➢
视线高度:1.2m 平面位置:距未设加宽的路面外边缘1.5m,或距路中线
B 1.5(m) 2
B2BB2/211-.5.15(m.5()m) 1.5m b
1.2
路面加宽
3.6.3 平曲线视距的保证
具干线功能的二级公路宜在3min的行驶时间内,提供一次满足超车 视距要求的超车路段。其他双车道公路可根据情况间隔设置具有超车 视距的路段。
2. 保证各级公路在平曲线内的行车视距的方法: 确定行车视距指标;
用最大横净距法或视距包络图法检查曲线内侧的视点轨迹线处的视 距是否满足指标要求;
(第9讲)
教学内容: ➢1. 行车视距的概念 ➢2. 行车视距的计算方法及标准 ➢3. 行车视距的保证
重点解决的问题: 1. 各级公路执行的行车视距的指标分别是什么? 2. 如何保证各级公路在平曲线内的行车视距?
3.6 行车视距
1.定义:行车视距是指汽车在行驶中,当发现障碍物后,能及时采取措 施,防止发生交通事故所需要的必须的最小距离。
其值可根据视距S和曲线长L、行车轨迹曲线半径RS算出。
(2)最大横净距计算方法:
▪ 1)不设回旋线的横净距计算:
▪ ①曲线长L>视距S:
h
Rs
Rs
cos
2
Rs (1
cos
)
2
180 S Rs
视点轨迹线
▪式中:Rs——驾驶员视点轨迹线半径,
Rs
R
B 2
1.5
②曲线长L<视距S:
▪ 横净距:在弯道各点的横断面上,驾驶员视点轨迹线与视距线之间的 最大距离叫横净距。
▪ 驾驶员视点位置:
➢ ➢
视线高度:1.2m 平面位置:距未设加宽的路面外边缘1.5m,或距路中线
B 1.5(m) 2
B2BB2/211-.5.15(m.5()m) 1.5m b
1.2
路面加宽
3.6.3 平曲线视距的保证
具干线功能的二级公路宜在3min的行驶时间内,提供一次满足超车 视距要求的超车路段。其他双车道公路可根据情况间隔设置具有超车 视距的路段。
2. 保证各级公路在平曲线内的行车视距的方法: 确定行车视距指标;
用最大横净距法或视距包络图法检查曲线内侧的视点轨迹线处的视 距是否满足指标要求;
行车视距的概念、标准和措施
▪ 制动生效时间为1.0s。
▪ 感觉和制动生效的总时间t=2.5s,我国采用1.2s
▪ 在这个时间内汽车行驶的距离为:
S1
V 3.6
t
3.6.1 行车视距的计算
1.停车视距 ▪定义:停车视距是指驾驶人员发现前方有障碍物后,采取制定措施使汽 车在障碍物前停下来所需要的最短距离。 ▪ 停车视距构成:
▪(1)反应距离S1:是当驾驶人员发现前方的阻碍物,经过判断决定采 取制动措施的那一瞬间到制动器真正开始起作用的那一瞬间汽车所行驶
在满足停车视距的路段,也可采用严格的分道行驶措施,如设分道 线、分隔带、分隔桩;或设成两条分离的单车道等。
4. 高速公路、一级公路以及大型车比例高的二、三级公路的下坡路段, 应采用下坡段货车停车视距对相关路段进行检验。
5. 积雪冰冻地区的停车视距宜适当增长。
3.6.3 平曲线视距的保证
平曲线视距检查方法: ①最大横净距法
1. 最大横净距法
②视距包络曲线法
▪ (1)基本概念
▪ 横净距:在弯道各点的横断面上,驾驶员视点轨迹线与视距线之间的 最大距离叫横净距。
S4
V 3.6
(t1
t2 )
➢ 全超车视距为: S超=S1+S2+S3+S4
最小必要超车视距为:
全超车视距为: S超=S1+S2+S3+S4
对向汽车行驶时间大致为t2的2/3
,
S4'
2 3
t2
V 3.6
最小必要超车视距为: S超
2 3
S2
S3
S
' 4
最小必要超车视距
2
3 S2
SS’S’44'4
行车视距城市道路中演示文档
▪ 感觉和制动生效的总时间t=2.5s,我国采用1.2s
▪ 在这个时间内汽车行驶的距离为:
S1
V 3.6
t
3.6.1 行车视距的计算
1.停车视距 ▪定义:停车视距是指驾驶人员发现前方有障碍物后,采取制定措施使汽 车在障碍物前停下来所需要的最短距离。 ▪ 停车视距构成:
▪(1)反应距离S1:是当驾驶人员发现前方的阻碍物,经过判断决定采 取制动措施的那一瞬间到制动器真正开始起作用的那一瞬间汽车所行驶
平面上的视距问题 纵断面上的视距问题
3.6.1 行车视距的计算
1.停车视距
▪定义:停车视距是指驾驶人员发现前方有障碍物后,采取制定措施使汽 车在障碍物前停下来所需要的最短距离。
▪ 停车视距构成:
STS1SZS0
反应距离
制动距离
S1
停车视距SSTZ
S0 安全距离
3.6.1 行车视距的计算
1.停车视距
视线高度:1.2m
B
平面位置:距未设加宽的路面外边缘1.5m,或距路中线
1.5(m) 2
最大横净距:在弯道内所有横净距中的最大值,称为最大横净距,用h 表示。
其值可根据视距S和曲线长L、行车轨迹曲线半径RS算出。
(2)最大横净距计算方法:
▪ 1)不设回旋线的横净距计算:
▪ ①曲线长L>视距S:
进入该车道之前所行驶距离为S1:
S1 3V.06t112a1t2
式中:V0——被超汽车的速度(km/h),较设计速度低10~20km/h; t1——加速时间(s), t1=2.9~4.5s; a——平均加速度(m/s2)。
3. 超车视距
(1)定义: 超车视距是指汽车安全超越前车所需的最小通视距离。
行车视距(城市道路中)~
引入智能技术
利用智能交通技术,如自动驾驶、车路协同等,提高行车视距和道 路安全。
06
案例分析
案例一:某城市道路的行车视距问题
问题描述
01
某城市道路由于两侧建筑物的遮挡,导致部分路段行车视距不
足,存在安全隐患。
解决方案
02
通过调整建筑物的布局,增加视距,同时设置交通标志和标线,
提醒驾驶员注意安全。
如何通过改善行车视距提高交通安全
优化道路设计
合理规划车道宽度、道路线形和交通标志等 ,提高驾驶员的视距和感知能力。
改善照明条件
在道路两侧设置绿化带和防护栏,减少驾驶 员视线遮挡,提高行车视距。
增加绿化带和防护栏
合理布置路灯和加强照明,提高夜间和低能 见度条件下的行车视距。
强化交通管理
加强交通执法和交通疏导,规范驾驶员行为 ,降低因超速、违规变道等行为导致的事故 风险。
诱导视距
01
定义
诱导视距是指通过道路设计、交通工程措施等手段,诱导驾驶员形成良
好的行车视距,提高行车安全性的距离。
02
影响因素
诱导视距受到道路线形、路面状况、交通工程设施等因素的影响。
03
安全距离
在城市道路中,应合理设置诱导视距,通过优化道路设计、改善路面状
况、完善交通工程设施等措施,引导驾驶员形成良好的行车视距,降低
行车视距(城市道路中)
目录
• 引言 • 行车视距的分类 • 影响行车视距的因素 • 行车视距与交通安全 • 行车视距的检测与评估 • 案例分析
01
引言
行车视距的定义
01
行车视距是指驾驶员在行驶过程 中,从眼睛到道路上最近障碍物 的视线距离。
02
利用智能交通技术,如自动驾驶、车路协同等,提高行车视距和道 路安全。
06
案例分析
案例一:某城市道路的行车视距问题
问题描述
01
某城市道路由于两侧建筑物的遮挡,导致部分路段行车视距不
足,存在安全隐患。
解决方案
02
通过调整建筑物的布局,增加视距,同时设置交通标志和标线,
提醒驾驶员注意安全。
如何通过改善行车视距提高交通安全
优化道路设计
合理规划车道宽度、道路线形和交通标志等 ,提高驾驶员的视距和感知能力。
改善照明条件
在道路两侧设置绿化带和防护栏,减少驾驶 员视线遮挡,提高行车视距。
增加绿化带和防护栏
合理布置路灯和加强照明,提高夜间和低能 见度条件下的行车视距。
强化交通管理
加强交通执法和交通疏导,规范驾驶员行为 ,降低因超速、违规变道等行为导致的事故 风险。
诱导视距
01
定义
诱导视距是指通过道路设计、交通工程措施等手段,诱导驾驶员形成良
好的行车视距,提高行车安全性的距离。
02
影响因素
诱导视距受到道路线形、路面状况、交通工程设施等因素的影响。
03
安全距离
在城市道路中,应合理设置诱导视距,通过优化道路设计、改善路面状
况、完善交通工程设施等措施,引导驾驶员形成良好的行车视距,降低
行车视距(城市道路中)
目录
• 引言 • 行车视距的分类 • 影响行车视距的因素 • 行车视距与交通安全 • 行车视距的检测与评估 • 案例分析
01
引言
行车视距的定义
01
行车视距是指驾驶员在行驶过程 中,从眼睛到道路上最近障碍物 的视线距离。
02
行车视距和路线平面设计成果PPT课件
跳转到第一页
二、超车视距
1.定义:
超车视距是指汽车安全超越前车所需的最小通视距 离。
最小必要超车视距
2 S2 3
S '4
加速 S1
超车(逆向行驶) S2 全超车视距
S3
安全距离
对向行驶 S4
跳转到第一页
2.超车视距的构成: 超车视距的全程可分为四个阶段: (1)加速行驶距离S1
跳转到第一页
三、各级公路对视距的要求
1. 高速公路、一级公路应满足停车视距。 2. 二、三、四级公路的视距应满足会车视距的要求, 其长度应不小于停车视距的两倍。 工程特殊困难或受其它条件限制的地段,可采用 停车视距,但必须采取分道行驶措施。 3. 二、三、四级公路还应在适当间隔内设置满足超 车视距“一般值”的超车路段。 当地形及其它原因 不得已时,超车视距长度可适当缩减,最短不应小于 所列的低限值。 在二、三级公路中,宜在 3min 的行驶时间里,提 供一次满足超车视距的超车路段。一般情况下,不小 于总长度的10%~30%,并均匀布置。
跳转到第一页
4.目高(视线高)与物高: 目高(视线高):是指驾驶人员眼睛距地面的高度, 规定以车体较低的小客车为标准,采用1.2m。 物高:路面上障碍物的高度,0.10m
跳转到第一页
一、停车视距
1.定义:停车视距是指驾驶人员发现前方有障 碍物后,采取制定措施使汽车在障碍物前停下来所需 要的最短距离。 2.停车视距构成:
V S2 t2 3.6
( 3 )超车完了时,超车汽车与对向汽车之间的安 全距离S3: S3=15~100m
( 4)超车汽车从开始加速到超车完了时对向汽车 的行驶距离S4:
第二章第七节行车视距

第七节 行车视距
0 1 2 3 4 0' 5 R
6
2' 7
3'
4' 5'
6'
b
7'
0
图2-25 视距包络线图
1.2m y
第七节 行车视距
Z 路中线
Z0
A
a 路面 1.5m Bjx
1:n
B C
图2-26 开挖视距台
1:n 挖除
第八节 平面线形设计要点
圆曲线
R=∞
R
回旋线A β
图2-27 基本型
第八节 平面线形设计要点
III II
HY 由双向横坡向单 向 II
图2-17 平曲线缓和段
第七节 行车视距
s1
s2
s0=5m-10m
停车视距
图2-20 停车视距计算示意图
第七节 行车视距
汽车1 汽车1
S1
汽车1 汽车2
汽车1 汽车2 汽车2
汽车3 汽车1
汽车3
S2
S0
S3
SC
图2-21 超车视距计算示意图
第七节 行车视距
(一) 用解析法确定横净距
第七节 行车视距
(二)几何法确定横净距
● 用绘图方法确定清除障碍物范围,称为视距包络图。
● 视距包络图的作图步骤如下: ◆ 按比例画出弯道平面图,在图上示出路面两边边缘(包 括路面加宽在内)、路基边缘线(包括路基加宽在内)、路 中线及距加宽前路面内侧边缘1.5 m 的行车轨迹线(有缓和 曲线时也应按缓和曲线形式画出汽车轨迹线);
安全距离是指汽车停住至障碍物前的距离,S 0 一般取5m~10 m。
结论 停车视距为:
道路勘测设计 4第2章 平面设计4s视距习题PPT课件
整理上式得:
h L (2S L) 8RS
h
π L 180αRs
26
《道路勘测设计》
2、设回旋线的横净距计算:
分三种情况,一是圆曲线长L' > S,二是曲线总长
L>S>L' ,三是曲线总长L<S
(1)圆曲线长L' > S
RS
h S2 8RS
27
《道路勘测设计》
(2)曲线总长L>S>L'
hh1h2
180 S Rs
式中:RS—行车轨迹线半径
Rs
R
B1.5 2
将cosγ/2按三角级数
展开,并整理得:
h S2 8RS
25
《道路勘测设计》
(2)L< S:
RS
h1RsRsco2 sRs(1co2)s
h2
SLsinα 22
hh 1h2R s(1co α 2)s S 2Lsiα 2n
式中: L——曲线内侧行驶轨迹线长度
6
《道路勘测设计》
第六节 行车视距及其保证
一、视距的类型 二、视距计算 三、行车视距的保证 四、各级公路对视距的要求
7
《道路勘测设计》
二、视距计算
☆目高(视线高):是指驾驶人员眼睛距地面的高度,规定以车体较低的小 客车为标准,采用1.2m。
☆物高:路面上障碍物的高度,一般取0.10m
(一)停车视距 1、定义:停车视距是指驾驶人员发现前方有障碍物后,采取制定措施使汽车 在障碍物前停下来所行驶的最短距离。 2、停车视距构成:
S2
t2
S2=t2V/3.6
S3 S4=V/3.6×(t1+t2)
第二章行车视距精制课件
V2
254
故停车视距为
S停
S1
S2
S0
V ·t 3
KV 2
254 (
)
(3~5)
精制课件
11
式中:V―――计算行车速度; t―――反应时间,取1.2s ;
―――路面与轮胎之间的附着系数,
一般按潮湿状态; ψ―――道路阻力系数。 K ―――制动系数,一般为1.2~1.4。
精制课件
12
公路等级
K1+047.435
K1+147.985
K1+248.535
K1+298.535 104.562 523.850 116º46′43.0″
K1+856.809
K1+896.809
K1+922.015
K1+947.221
K1+987.221 558.274 787.538 82º14′27.0″
K2+315.893
S
h
B
A
其值可根据视距S和弯道的曲线长L、行车轨迹曲线半径RS算出。
精制课件
24
• 1.不设回旋线的横净距 计算:
• (1)L>S:
h
Rs
Rs
cos
2
Rs (1
cos )
2
180 S . Rs
式中:Rs——驾驶员视点轨迹线半径,
Rs
R
B 2
1.5
精制课件
RS
25
• 1.不设回旋线的横净距计算:
: ▪ 2.停车视距构成
反应距离
制动距离
停车距离ST
安全距离
精制课件
行车视距(城市道路中) ppt课件
(2)分道行驶: 二、三、四级公路,受地形条件或其它特殊情况限制路段 ,若不能保证
2倍停车视距,则必须满足停车视距,同时必须采用严格的分道行驶措施。 如设分道线、分隔带、分隔桩;或设成两条分离的单车道。
补救措施:限速、设反光镜等
PPT课件
21
结论
1. 各级公路执行的行车视距的指标: 高速、一级公路应满足停车视距的要求;
Rs R
Ls
LY L'
▪ ③曲线总长L<S:
h
Rs (1
cos
2
2
0)
Ls
'sin(
2
)
S
L' 2
sin
2
arctan LS'
6RS
PPT课件
17
2. 视距包络图法
▪ 视距包络图就是在驾驶员视点轨迹线上每隔一定间隔绘出一系列的视距 线,视距线相互交叉而形成的外边缘线作为清除障碍的界限的方法。
②视距包络曲线法
▪ (1)基本概念
▪ 横净距:在弯道各点的横断面上,驾驶员视点轨迹线与视距线之间的 最大距离叫横净距。
▪ 驾驶员视点位置:
➢ ➢
视线高度:1.2m 平面位置:距未设加宽的路面外边缘1.5m,或距路中线
B 1.5(m) 2
B2BB2/211-.5.15(m.5()m) 1.5m b
1.2
11
3.6.3 平曲线视距的保证
平曲线视距检查方法: ①最大横净距法
1. 最大横净距法
②视距包络曲线法
▪ (1)基本概念
▪ 横净距:在弯道各点的横断面上,驾驶员视点轨迹线与视距线之间的 最大距离叫横净距。
S
h B
A
PPT课件
2倍停车视距,则必须满足停车视距,同时必须采用严格的分道行驶措施。 如设分道线、分隔带、分隔桩;或设成两条分离的单车道。
补救措施:限速、设反光镜等
PPT课件
21
结论
1. 各级公路执行的行车视距的指标: 高速、一级公路应满足停车视距的要求;
Rs R
Ls
LY L'
▪ ③曲线总长L<S:
h
Rs (1
cos
2
2
0)
Ls
'sin(
2
)
S
L' 2
sin
2
arctan LS'
6RS
PPT课件
17
2. 视距包络图法
▪ 视距包络图就是在驾驶员视点轨迹线上每隔一定间隔绘出一系列的视距 线,视距线相互交叉而形成的外边缘线作为清除障碍的界限的方法。
②视距包络曲线法
▪ (1)基本概念
▪ 横净距:在弯道各点的横断面上,驾驶员视点轨迹线与视距线之间的 最大距离叫横净距。
▪ 驾驶员视点位置:
➢ ➢
视线高度:1.2m 平面位置:距未设加宽的路面外边缘1.5m,或距路中线
B 1.5(m) 2
B2BB2/211-.5.15(m.5()m) 1.5m b
1.2
11
3.6.3 平曲线视距的保证
平曲线视距检查方法: ①最大横净距法
1. 最大横净距法
②视距包络曲线法
▪ (1)基本概念
▪ 横净距:在弯道各点的横断面上,驾驶员视点轨迹线与视距线之间的 最大距离叫横净距。
S
h B
A
PPT课件
【高速公路】第四章 4-7行车视距
跳转到第一页
第七节
平面中线定线
高速公路、一级公路应以曲线为基础的平面定线方法
跳转到第一页
跳转到第一页
跳转到第一页
跳转到第一页
跳转到第一页
第七节 路线平面设计成果
1. 设计图:路线平面设计图 图4-30 道路平面布置图 2. 设计表:直线、曲线及转角表 逐桩坐标表 路线固定表 总里程表等。
(一)坐标系统的采用: 1.采用统一的高斯正投影3°带平面直角坐标系统; 2.采用高斯正投影3°带或任意带平面直角坐标系 统,投影面可采用1985年国家高程基准、测区抵偿高 程面或测区平均高程面; 3.三级和三级以下公路、独立桥梁、隧道及其它 构造物等小测区,可不经投影,采用平面直角坐标系 统在平面上直接进行计算; 4.在已有平面控制网的地区,应尽量沿用原有的 坐标系统,如精度不合要求,也应充分利用其点位, 选用其中一点的坐标及含此点的方位角,作为平面控 制的起算依据。
跳转到第一页
(二)中桩坐标的计算
1.计算导线点DD坐标: 采用两阶段勘测设计的公路或一阶段设计但遇 地形困难的路段,一般都要先作平面控制测量, 而路线的平面控制测量多采用导线测量的方法。
跳转到第一页
2.计算交点坐标:
Xn=Xn-1+LJDcosφn-1 Yn=Yn-1+LJDsinφn-1 式中:Xn——JDn的X坐标(北坐标); Yn——JDn的Y坐标(东坐标); LJD——交点间距(JDn-1 到JDn间距);
计算磁偏角
跳转到第一页
跳转到第一页
3.行车视距分类:
(1)停车视距:汽车行驶时,自驾驶人员看到前 方障碍物时起,至到达障碍物前安全停止,所需的最 短距离。 (2)会车视距:在同一车道上两对向汽车相遇, 从相互发现时起,至同时采取制动措施使两车安全停 止,所需的最短距离。 (3)超车视距:在双车道公路上,后车超越前车 时,从开始驶离原车道之处起,至可见逆行车并能超 车后安全驶回原车道所需的最短距离。
第七节
平面中线定线
高速公路、一级公路应以曲线为基础的平面定线方法
跳转到第一页
跳转到第一页
跳转到第一页
跳转到第一页
跳转到第一页
第七节 路线平面设计成果
1. 设计图:路线平面设计图 图4-30 道路平面布置图 2. 设计表:直线、曲线及转角表 逐桩坐标表 路线固定表 总里程表等。
(一)坐标系统的采用: 1.采用统一的高斯正投影3°带平面直角坐标系统; 2.采用高斯正投影3°带或任意带平面直角坐标系 统,投影面可采用1985年国家高程基准、测区抵偿高 程面或测区平均高程面; 3.三级和三级以下公路、独立桥梁、隧道及其它 构造物等小测区,可不经投影,采用平面直角坐标系 统在平面上直接进行计算; 4.在已有平面控制网的地区,应尽量沿用原有的 坐标系统,如精度不合要求,也应充分利用其点位, 选用其中一点的坐标及含此点的方位角,作为平面控 制的起算依据。
跳转到第一页
(二)中桩坐标的计算
1.计算导线点DD坐标: 采用两阶段勘测设计的公路或一阶段设计但遇 地形困难的路段,一般都要先作平面控制测量, 而路线的平面控制测量多采用导线测量的方法。
跳转到第一页
2.计算交点坐标:
Xn=Xn-1+LJDcosφn-1 Yn=Yn-1+LJDsinφn-1 式中:Xn——JDn的X坐标(北坐标); Yn——JDn的Y坐标(东坐标); LJD——交点间距(JDn-1 到JDn间距);
计算磁偏角
跳转到第一页
跳转到第一页
3.行车视距分类:
(1)停车视距:汽车行驶时,自驾驶人员看到前 方障碍物时起,至到达障碍物前安全停止,所需的最 短距离。 (2)会车视距:在同一车道上两对向汽车相遇, 从相互发现时起,至同时采取制动措施使两车安全停 止,所需的最短距离。 (3)超车视距:在双车道公路上,后车超越前车 时,从开始驶离原车道之处起,至可见逆行车并能超 车后安全驶回原车道所需的最短距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
视距
必须保证通视的区域 ) 看不见的区域
)
看不见的区域
) 图3-23 影响行车视距的地点
3
2.行车视距的分类
(1)停车视距 汽车行驶时,自驾驶人员看到前方障碍 物时起到安全停车所需的最短距离。
(2)会车视距 在同一车道上两对向汽车相遇,从相互 发现并同时采取措施时起,到两车安全停止所需的最短 距离。
15
会车视距示意图
16
三、 超车视距
为了超车时的安全,司机必须能看到前面有足 够长度的车流空隙,以便在相邻车道上没有出现对 向驶来的汽车之前,完成超车而不阻碍被超汽车的 行驶。
这种快车超越前面慢车后再回到原来车道所需 要的最短距离称为超车视距.
17
最小必要超车视距
2 3
S
2
S
' 4
加速 S1
超车 S2
n 折减的超车视距: S超=S1+S2+S3+S'4
n 最小必要超车视距为: S超3 2S2 S3S4'
21
以上四个距离之和是比较理想的全超车过程,其 距离较长。在地形较为复杂的地点感到很难实现。
因此,应将计算结果减小以便实际能够接受。 事实上,尾随在慢车后面的快车司机往往在未看到 前面的安全区段就已经开始了超车作业,如果进入对向 车道之后发现迎面有汽车开来而超车距离又不足时,可 返回自己的车道。
停车视距 210 160 110 75 160 75 110 40 110 40 75 30 40 20
14
会车视距:
§ 定义:会车视距是在同一车道上两对向汽车相遇,从相互发现时起,至 同时采取制动措施使两车安全停止,所需的最短距离。 § 停车视距构成: §①双方驾驶员反应时间所行驶的距离; §②双方汽车的制动距离; §③安全距离。 §会车视距的规定值是其长度不应小于停车视距的两倍。
5
二、停车视距
§ 1.定义:停车视距是指驾驶人员发现前方有障碍物后,采取制定措施使汽车 在障碍物前停下来所需要的最短距离。
: § 2.停车视距构成
反应距离
制动距离
停车距离ST
安全距离
6
为使高速公路上车辆之间保持安全距离,通常采用200 米,150米,100米,50米等距离法,将标志放在右侧。
7
北京,中国
全超车视距
S3 安全距离
对向行驶 S4
18
n 2.超车视距的构成:
n 超车视距的全程可分为四个阶段:
n (1)加速行驶距离S1 n 当超车汽车经判断认为有超车的可能,于是加速行 驶移向对向车道,在进入该车道之前所行驶距离为S1:
S1 3V.06t1 12at12
n式中:V。——被超汽车的速度(km/h);
4.高速、一级及大型车比.积雪冰冻地区适当延长。
23
• 平曲线视距的保证 • 一.平曲线视距检查方法
22
各级公路对视距的要求
• 1. 高速公路、一级公路应满足停车视距。
• 2. 二、三、四级公路的视距应满足会车视距的要求,其长度应不小 于停车视距的两倍。
• 工程特殊困难或受其它条件限制的地段,可采 用停车视距,但 必须采取分道行驶措施。
3. 在二、三级公路中,宜在3min的行驶时间里,提供一次满足超 车视距的超车路段。一般情况下,不小于总长度的10%~30%,并均 匀布置。
S1
V 3.6
t
式中:t―――反应时间,取t=1.2s。
11
2 . 制动距离
制动距离是指汽车从制动生效到汽车完全停住,这 段时间内所走的距离:
S2
V2
254
故停车视距为
S停 S1S2S0V 3 · t2K 5 ( 4 2V ) ( 3~ 5)
12
式中:V―――计算行车速度; t―――反应时间,取1.2s ;
n
t1——加速时间(s);2.9~4.5s
n
a——平均加速度(m/s2)。
19
(2)超车汽车在对向车道上行驶的距离S2
V S2 3.6 t2
n(3)超车完了时,超车汽车与对向汽车之间的安全距离S3:
n
S3=15~100m
n(4)超车汽车从开始加速到超车完了时对向汽车的行驶距离S4:
S4 3V.d6(t1 t2)
―――路面与轮胎之间的附着系数,
一般按潮湿状态; ψ―――道路阻力系数。 K ―――制动系数,一般为1.2~1.4。
13
公路等级
各等级公路停车视距
汽车专用公路
高速公路
一
二
表 3—12
一般公路
二
三
四
地形
平原 微丘
重丘
山岭
平原 山岭 平原 山岭 平原 山岭 平原 山岭 平原 山岭 微丘 重丘 微丘 重丘 微丘 重丘 微丘 重丘 微丘 重丘
(3)超车视距 在双车道公路上,后车超越前车时,从 开始驶离原车道之处起,至可见逆行车并能超车后安全 驶回原车道所需的最短距离。
4
3. 目高与物高
(1)目高 是指驾驶员眼睛距地面的高度,规定 以小客车为标准,采用1.2m。
(2)物高 是指路面上的物体至路面的垂直距离 。汽车底盘离地的最小高度一般为0.14~0.2m,故 规定物高为0.1m。
n以上四个距离之和是比较理想的全超车过程, t2 =9.3~10.4s
n全超车视距为: S超=S1+S2+S3+S4
20
• 最小必要超车视距为:
最小必要超车视距
2 3
S
2
S
' 4
加速 S1
超车 S2
全超车视距
S3 安全距离
对向行驶 S4
n对向汽车行驶时间大致为t2的2/3 ,
S'4
2 3
t
2
Vd 3.6
8
英国公路上最近采用路面划标线的办法,使车辆保持两个波距
9
为使高速公路上车辆之间保持安全距离,通常采用200米,150米,100米,50 米等距离法,将标志放在右侧,英国最近采用路面划标线的办法,保持两个波距
10
1.反应距离
反应距离是指当驾驶员发现前方的障碍物,经过 判断决定采取制动措施的那一瞬间到制动器真正开始起 作用的那一瞬间汽车所行驶的距离:
一、 基本概念
1.行车视距:为了行车安全,驾驶人员应能看到汽车 前面相当远的一段路程,一旦发现前方路面上有障碍物 或迎面来车,能及时采取措施(刹车或绕避),避免相撞, 这一必须的最短距离称为行车视距。
行车视距能否得到保证,直接关系到行车的安全, 它是道路使用质量的重要指标之一。
1
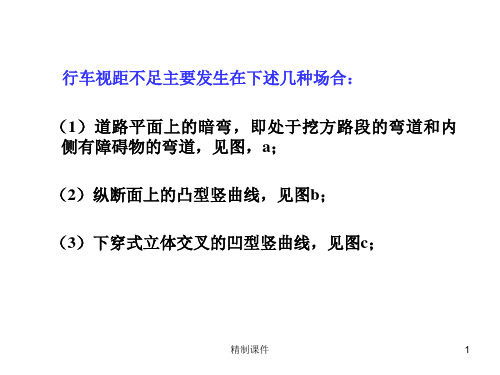
行车视距不足主要发生在下述几种场合: (1)道路平面上的暗弯,即处于挖方路段的弯道和内 侧有障碍物的弯道,见图,a; (2)纵断面上的凸型竖曲线,见图b; (3)下穿式立体交叉的凹型竖曲线,见图c;
视距
必须保证通视的区域 ) 看不见的区域
)
看不见的区域
) 图3-23 影响行车视距的地点
3
2.行车视距的分类
(1)停车视距 汽车行驶时,自驾驶人员看到前方障碍 物时起到安全停车所需的最短距离。
(2)会车视距 在同一车道上两对向汽车相遇,从相互 发现并同时采取措施时起,到两车安全停止所需的最短 距离。
15
会车视距示意图
16
三、 超车视距
为了超车时的安全,司机必须能看到前面有足 够长度的车流空隙,以便在相邻车道上没有出现对 向驶来的汽车之前,完成超车而不阻碍被超汽车的 行驶。
这种快车超越前面慢车后再回到原来车道所需 要的最短距离称为超车视距.
17
最小必要超车视距
2 3
S
2
S
' 4
加速 S1
超车 S2
n 折减的超车视距: S超=S1+S2+S3+S'4
n 最小必要超车视距为: S超3 2S2 S3S4'
21
以上四个距离之和是比较理想的全超车过程,其 距离较长。在地形较为复杂的地点感到很难实现。
因此,应将计算结果减小以便实际能够接受。 事实上,尾随在慢车后面的快车司机往往在未看到 前面的安全区段就已经开始了超车作业,如果进入对向 车道之后发现迎面有汽车开来而超车距离又不足时,可 返回自己的车道。
停车视距 210 160 110 75 160 75 110 40 110 40 75 30 40 20
14
会车视距:
§ 定义:会车视距是在同一车道上两对向汽车相遇,从相互发现时起,至 同时采取制动措施使两车安全停止,所需的最短距离。 § 停车视距构成: §①双方驾驶员反应时间所行驶的距离; §②双方汽车的制动距离; §③安全距离。 §会车视距的规定值是其长度不应小于停车视距的两倍。
5
二、停车视距
§ 1.定义:停车视距是指驾驶人员发现前方有障碍物后,采取制定措施使汽车 在障碍物前停下来所需要的最短距离。
: § 2.停车视距构成
反应距离
制动距离
停车距离ST
安全距离
6
为使高速公路上车辆之间保持安全距离,通常采用200 米,150米,100米,50米等距离法,将标志放在右侧。
7
北京,中国
全超车视距
S3 安全距离
对向行驶 S4
18
n 2.超车视距的构成:
n 超车视距的全程可分为四个阶段:
n (1)加速行驶距离S1 n 当超车汽车经判断认为有超车的可能,于是加速行 驶移向对向车道,在进入该车道之前所行驶距离为S1:
S1 3V.06t1 12at12
n式中:V。——被超汽车的速度(km/h);
4.高速、一级及大型车比.积雪冰冻地区适当延长。
23
• 平曲线视距的保证 • 一.平曲线视距检查方法
22
各级公路对视距的要求
• 1. 高速公路、一级公路应满足停车视距。
• 2. 二、三、四级公路的视距应满足会车视距的要求,其长度应不小 于停车视距的两倍。
• 工程特殊困难或受其它条件限制的地段,可采 用停车视距,但 必须采取分道行驶措施。
3. 在二、三级公路中,宜在3min的行驶时间里,提供一次满足超 车视距的超车路段。一般情况下,不小于总长度的10%~30%,并均 匀布置。
S1
V 3.6
t
式中:t―――反应时间,取t=1.2s。
11
2 . 制动距离
制动距离是指汽车从制动生效到汽车完全停住,这 段时间内所走的距离:
S2
V2
254
故停车视距为
S停 S1S2S0V 3 · t2K 5 ( 4 2V ) ( 3~ 5)
12
式中:V―――计算行车速度; t―――反应时间,取1.2s ;
n
t1——加速时间(s);2.9~4.5s
n
a——平均加速度(m/s2)。
19
(2)超车汽车在对向车道上行驶的距离S2
V S2 3.6 t2
n(3)超车完了时,超车汽车与对向汽车之间的安全距离S3:
n
S3=15~100m
n(4)超车汽车从开始加速到超车完了时对向汽车的行驶距离S4:
S4 3V.d6(t1 t2)
―――路面与轮胎之间的附着系数,
一般按潮湿状态; ψ―――道路阻力系数。 K ―――制动系数,一般为1.2~1.4。
13
公路等级
各等级公路停车视距
汽车专用公路
高速公路
一
二
表 3—12
一般公路
二
三
四
地形
平原 微丘
重丘
山岭
平原 山岭 平原 山岭 平原 山岭 平原 山岭 平原 山岭 微丘 重丘 微丘 重丘 微丘 重丘 微丘 重丘 微丘 重丘
(3)超车视距 在双车道公路上,后车超越前车时,从 开始驶离原车道之处起,至可见逆行车并能超车后安全 驶回原车道所需的最短距离。
4
3. 目高与物高
(1)目高 是指驾驶员眼睛距地面的高度,规定 以小客车为标准,采用1.2m。
(2)物高 是指路面上的物体至路面的垂直距离 。汽车底盘离地的最小高度一般为0.14~0.2m,故 规定物高为0.1m。
n以上四个距离之和是比较理想的全超车过程, t2 =9.3~10.4s
n全超车视距为: S超=S1+S2+S3+S4
20
• 最小必要超车视距为:
最小必要超车视距
2 3
S
2
S
' 4
加速 S1
超车 S2
全超车视距
S3 安全距离
对向行驶 S4
n对向汽车行驶时间大致为t2的2/3 ,
S'4
2 3
t
2
Vd 3.6
8
英国公路上最近采用路面划标线的办法,使车辆保持两个波距
9
为使高速公路上车辆之间保持安全距离,通常采用200米,150米,100米,50 米等距离法,将标志放在右侧,英国最近采用路面划标线的办法,保持两个波距
10
1.反应距离
反应距离是指当驾驶员发现前方的障碍物,经过 判断决定采取制动措施的那一瞬间到制动器真正开始起 作用的那一瞬间汽车所行驶的距离:
一、 基本概念
1.行车视距:为了行车安全,驾驶人员应能看到汽车 前面相当远的一段路程,一旦发现前方路面上有障碍物 或迎面来车,能及时采取措施(刹车或绕避),避免相撞, 这一必须的最短距离称为行车视距。
行车视距能否得到保证,直接关系到行车的安全, 它是道路使用质量的重要指标之一。
1
行车视距不足主要发生在下述几种场合: (1)道路平面上的暗弯,即处于挖方路段的弯道和内 侧有障碍物的弯道,见图,a; (2)纵断面上的凸型竖曲线,见图b; (3)下穿式立体交叉的凹型竖曲线,见图c;