基于的汽车动力学模型研究
基于CarSim的整车动力性建模
基于CarSim的整车动力性建模张绅山东省潍坊市潍坊学院 山东省潍坊市 261061摘 要: C arSim软件是一款越来越受到汽车研发人员喜爱的一款汽车仿真软件,利用软件对汽车进行整车建模以及仿真测试,可以通过三维动画或者数据图表分析仿真结果,从而便于汽车研发人员提升汽车的各项性能。
本文是针对汽车动力性进行建模仿真,文章首先对CarSim软件进行了简单介绍以及简单的使用教学,介绍了汽车动力性研究意义、影响因素及评价指标等相关内容,最后介绍了CarSim中车辆的各个部分参数设置问题。
关键词:CarSim;动力性;整车建模;仿真1 CarSim软件介绍1.1 CarSim软件的简介CarSim是一款专门针对中小型汽车的仿真软件,软件在本质上就是先建立一个车辆模型,再根据自己的仿真内容进行参数设置,处理器运算以后通过3D动画或表格数据展示仿真结果。
利用CarSim在计算机上进行模拟仿真速度比实际测试实验速度快许多倍,软件可以用来仿真车辆对驾驶员、地面情况等输入的响应,主要用来帮助提升汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性。
现如今CarSim凭借自身的优势已经逐渐被更多研发人员所应用。
CarSim软件系统可以与许多软件共同进行模拟仿真,例如CarSim和Simulink的协同仿真,从Simulink的各种变量中选择需要的导入到CarSim中进行模拟仿真,变量包括车辆控制输入、轮胎力和力矩、弹簧和阻尼力、转向系统驱动角度、传动系扭矩、制动扭矩和制动压力、空气动力学相关变量等超过160个变量。
CarSim建模和仿真后的数据也可以导出到其他模拟软件作为数据源进行模拟仿真和数据分析。
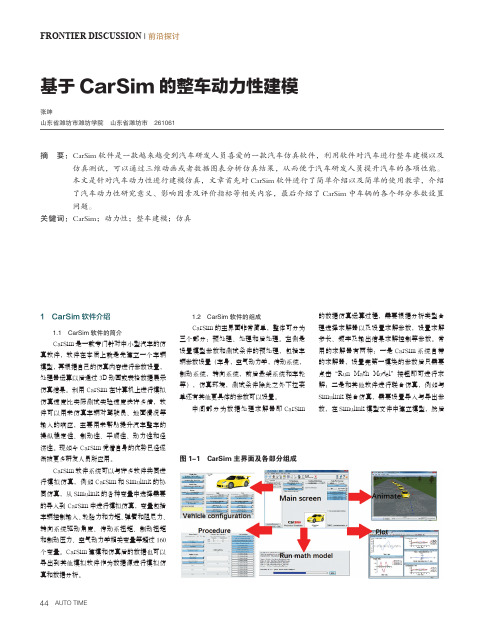
1.2 CarSim软件的组成CarSim的主界面非常简单,整体可分为三个部分:预处理、处理和后处理。
左侧是设置模型参数和测试条件的预处理,包括车辆参数设置(车身,空气动力学,传动系统,制动系统,转向系统,前后悬架系统和车轮等),仿真环境,测试条件除此之外下拉菜单还有其他更具体的参数可以设置。
基于DirectX的汽车动力学模型研究
汽车驾驶模拟系统中要求仿真的内容很多其序与硬件间坚实可靠的接口操作减少对硬件的设中汽车动力学操纵模型的建立是一项非常重要的内通软置并能体现硬件优越性能
汽车二自由度动力学模型

汽车二自由度动力学模型
汽车二自由度动力学模型是一种用于描述汽车运动的简化模型。
它考虑了两个自由度,通常是车辆的纵向(前进方向)和侧向(横向)运动。
在这个模型中,车辆被视为一个质量集中的刚体,通过两个自由度来描述其运动状态。
这两个自由度通常是车辆的速度(纵向)和横摆角速度(侧向)。
汽车二自由度动力学模型的建立基于一些基本的物理原理,如牛顿第二定律、动量守恒定律和刚体动力学。
通过对这些原理的应用,可以得到描述车辆运动的微分方程。
这些方程通常包括车辆的加速度、驱动力或制动力、转向力矩以及车辆的惯性参数等。
通过求解这些微分方程,可以预测车辆在不同工况下的运动响应,例如加速、制动、转弯等。
汽车二自由度动力学模型在车辆动力学研究、驾驶模拟器、自动驾驶系统等领域有广泛应用。
它可以帮助工程师和研究人员了解车辆的基本运动特性,评估车辆的操控稳定性、行驶安全性等方面的性能。
然而,需要注意的是,二自由度模型是一种简化的模型,它忽略了许多实际情况中的复杂因素,如悬挂系统、轮胎特性、空气动力学等。
在实际应用中,可能需要使用更复杂的多自由度模型或考虑更多的因素来更准确地描述汽车的运动。
总的来说,汽车二自由度动力学模型提供了一个简单而有用的工具,用于初步研究和理解汽车的运动行为,但在具体应用中,需要根据实际需求进行适当的修正和扩展。
如果你对汽车动力学模型有更深入的问题或需要进一步的讨论,我将很愿意提供帮助。
基于微观动力学模型的车辆行驶模拟研究
基于微观动力学模型的车辆行驶模拟研究近年来,城市交通越来越拥堵,给人们的出行带来了很大的不便。
为了更好地理解和研究城市交通拥堵的原因,许多学者和科研人员对车辆行驶行为进行了深入的研究。
随着计算机技术的不断发展,基于微观动力学模型的车辆行驶模拟技术越来越成熟,并在城市交通研究中得到广泛应用。
一、微观动力学模型的基本概念微观动力学模型是一种用于分析车辆交通流行为的数学模型,它是基于车辆内部驾驶人员的行为,研究车辆之间的相互作用、跟随行驶、频繁变道、车流调度等问题的一种模型。
与宏观模型不同的是,微观动力学模型是以车辆为研究对象,考虑车辆内部的驾驶员行为及周围车辆的影响,模拟车辆在实际道路上的行驶情况。
在微观动力学模型中,每个车辆是一个具有一定质量、长度、宽度等属性的“微观粒子”,它受到的力包括惯性力、摩擦力、引力、阻力等。
同时,车辆也会受到周围车辆的影响,如追随距离、车速等。
基于这些力和影响,微观动力学模型模拟了车辆的加速度、速度和位置等状态变化。
二、微观动力学模型在车辆行驶模拟中的应用基于微观动力学模型的车辆行驶模拟可应用于城市交通流量预测、道路规划、交通控制等领域。
首先,它可以用于城市交通流量预测。
通过对微观动力学模型的仿真模拟,可以得到车流的运行情况,如车速、流量等数据。
利用这些数据,可以预测城市交通拥堵情况,同时也可以为交通规划提供数据依据。
其次,微观动力学模型还可以应用于道路规划。
道路的设计必须考虑到车辆的流动性和性能。
通过微观动力学模型模拟车辆的行驶情况,可以更好地了解车辆行驶行为,从而为道路设计提供数据基础,制定更加合理的道路规划方案。
最后,微观动力学模型在交通控制方面也有广泛的应用。
根据微观动力学模型可以计算出车辆的运行状态和交通状况,可以针对性地采取交通控制措施,如借助信号灯和智能限速设备等实现公路交通流调度和控制。
三、微观动力学模型在城市交通研究中的挑战及发展在微观动力学模型的研究中,存在诸如数据缺乏、模型调节等问题。
基于ADAMSCar的汽车悬架系统_动力学建模与仿真分析毕业设计

毕业设计(论文)题目:基于ADAMS/Car的汽车悬架系统动力学建模与仿真分析毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日指导教师评价:一、撰写(设计)过程1、学生在论文(设计)过程中的治学态度、工作精神□优□良□中□及格□不及格2、学生掌握专业知识、技能的扎实程度□优□良□中□及格□不及格3、学生综合运用所学知识和专业技能分析和解决问题的能力□优□良□中□及格□不及格4、研究方法的科学性;技术线路的可行性;设计方案的合理性□优□良□中□及格□不及格5、完成毕业论文(设计)期间的出勤情况□优□良□中□及格□不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格建议成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)指导教师:(签名)单位:(盖章)年月日评阅教师评价:一、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格二、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格建议成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)评阅教师:(签名)单位:(盖章)年月日教研室(或答辩小组)及教学系意见教研室(或答辩小组)评价:一、答辩过程1、毕业论文(设计)的基本要点和见解的叙述情况□优□良□中□及格□不及格2、对答辩问题的反应、理解、表达情况□优□良□中□及格□不及格3、学生答辩过程中的精神状态□优□良□中□及格□不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格评定成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)教研室主任(或答辩小组组长):(签名)年月日教学系意见:系主任:(签名)年月日********大学毕业设计(论文)任务书姓名:院(系):专业:班号:任务起至日期:毕业设计(论文)题目:基于ADAMS/Car汽车悬架系统动力学建模与仿真分析立题的目的和意义:汽车悬架是车架(或车身)与车轴(或车轮)之间的弹性联结装置的统称。
汽车悬架系统动力学模型的研究
1 绪论随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
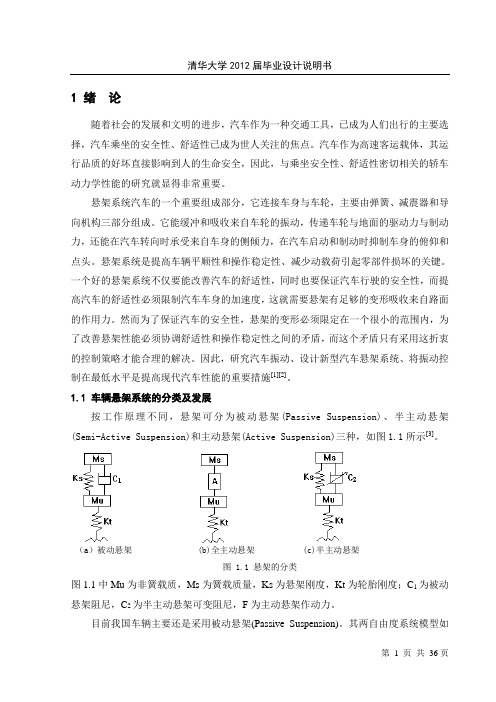
1.1 车辆悬架系统的分类及发展按工作原理不同,悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)和主动悬架(Active Suspension)三种,如图1.1所示[3]。
(a)被动悬架 (b)全主动悬架 (c)半主动悬架图 1.1 悬架的分类图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(Passive Suspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
基于车辆动力学模型的AMT在环仿真实验系统研究
基于车辆动力学模型的AMT在环仿真实验系统研究作者:丁文涛,刘大维,郑旭光,王辛立,王玉海来源:《现代电子技术》2010年第19期摘要:为提高AMT系统的开发效率和开发质量,研制了一种AMT在环仿真实验系统,将真实的车辆AMT相关部件用仿真模型来代替,建立了车辆传动系统及其部件的动力学模型,并进行相应的程序设计,模拟真实车辆的发动机转速、车速等信息,对AMT电控单元在实车实验之前进行验证,为AMT电控系统的开发提供了一个方便、可靠的实验平台。
关键词:AMT; 在环仿真; 车辆动力学; 仿真模型中图分类号:TN919-34文献标识码:A文章编号:1004-373X(2010)19-0195-03Loop Simulation Experimental System for AMT Based on Vehicle Dynamics ModelDING Wen-tao1,LIU Da-wei1,ZHENG Xu-guang2,WANG Xin-li2,WANG Yu-hai2(1.Qingdao University,Qingdao 266071,China; 2.FAW Jiefang Qingdao Auto Factory,Qingdao 266043, China)Abstract: To improve the efficiency and quality of the AMT system development, the-loop simulation experimental system for AMT was developed. Using simulation model instead of the real vehicle related components of AMT, establishing the vehicle transmission system and dynamic model, designing the corresponding program to simulate the engine speed and vehicle speed. The AMT control unit is verified before experiment, and a convenient and reliable experimental platform is provided for the development of AMT control system.Keywords: AMT; the-loop simulation; vehicle dynamics; simulation model0 引言重型车辆具有总质量大、使用工况复杂、挡位多等特点,为减轻驾驶员的操纵难度和劳动强度,实现重型车辆的自动变速具有重大现实意义[1]。
汽车车辆动力学建模与仿真研究
汽车车辆动力学建模与仿真研究汽车车辆动力学是汽车工程的重要学科之一,其研究内容包括车辆运动、悬挂、转向、制动、驱动等方面。
为了更好地理解汽车动力学,进行科学的研究与优化,需要对汽车车辆动力学进行建模与仿真。
一、汽车车辆动力学建模汽车车辆动力学建模是指将汽车运动过程中的各个因素用数学模型表示出来,以便在计算机上进行仿真和分析。
1. 车辆模型车辆模型是汽车车辆动力学建模的基础,主要分为自由度模型和多体模型两种。
自由度模型通常包括垂直运动、横向运动和纵向运动三个自由度,其建模基于牛顿第二定律,包括了车辆的悬挂系统、车轮力、刹车等因素。
多体模型是指以整个车辆为一个多体系统进行建模,除了考虑车辆受力、受扭等因素外,还需要考虑车辆的刚度、弹性等因素。
2. 动力系统模型动力系统模型指的是发动机、变速器、传动系等部分的建模,主要用于模拟车辆行驶过程中的速度、加速度和所需的扭矩等参数。
这些参数可以帮助分析车辆的加速和制动性能,以及制定优化策略。
3. 环境模型环境模型包括路面状态、气象条件等因素,通过对这些因素的建模,可以更好地帮助预测车辆的行驶状态和性能。
例如,模拟不同路面条件下车辆的制动距离、转向响应和行驶稳定性等。
二、汽车车辆动力学仿真汽车车辆动力学仿真是通过计算机程序对汽车运动过程进行模拟,以评估汽车的性能、预测其行为并进行优化设计。
1. 动力学仿真动力学仿真主要用于分析车辆加速、制动和转向等性能。
通过仿真可以模拟不同车速下车辆的加速和制动距离、不同路面条件下车辆的制动力和转向响应等因素,从而得出优化设计的方案。
2. 悬挂系统仿真悬挂系统的仿真主要用于分析车辆在不同路面条件下的行驶稳定性和舒适性。
通过对悬挂系统进行仿真,可以预测不同路面下车辆的摇摆情况、平顺性能以及行驶性能等参数,为改进车辆悬挂系统提供设计方案。
3. 转向仿真转向仿真主要用于分析车辆在快速转向和超车等情况下的转向响应和稳定性。
通过对车辆转向系统的建模和仿真,可以分析车辆的稳定性、刹车距离和抓地力等因素,为设计更有效的转向系统提供方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[1]蔡忠法,章安元.汽车模拟驾驶模型与仿真的研究[J],浙江大学 学报(工学版),2005,5(3):327—330. [2]余志生.汽车理论(第三版)[M].北京:机械工业出版社,2004. [3]曾辉,严新平,吴超仲等.基于动力学分析的驾驶模拟器运动仿 真算法[J],武汉理工大学学报(交通科学与工程版),2005,6(3):
肘。为离合器上的扭矩,丝为发动机输出扭矩,
万方数据
.1 1.
2007年第4期
农业装备与车辆工程
面的平面上运动,汽车行驶方向模型可看作汽车转 角与方向盘转角之间的函数关系,并假设汽车转向 时汽车行驶方向的改变无延迟地跟随方向盘转角的 控制。当方向盘转动8W角度时,经时间出后,汽车 行驶方向在初始方向基础上转过施角度,其中汽车 转弯半径R由方向盘转角&决定,即R=%/岛,其 中乇为汽车转弯半径与方向盘转角的系数。由此可 以推导出:
dO=≯醣dt
1W
(10)
2.4制动系模型 采用一阶函数来模拟脚刹车产生的制动力矩 吒,即:E=矗6xp6 (11)
4结果和改进
本文介绍了~个基于DirectX技术的汽车驾驶 模拟操纵控制模型,这一控制模型包括汽车运动学 数学模型、3D环境下的运动仿真模型以及根据驾车 实际情况制定的汽车转向和换挡操作策略。实验表 明。本系统较好地模拟了汽车驾驶操作及其在三维 场景的行驶。今后将在汽车的动力学建模、行驶碰撞 反应以及汽车3D实体模型等方面加以改进,使得 基于此模型的虚拟现实模拟驾驶系统具备更好的真 实感,使操作者能够更好地“沉浸”在汽车驾驶当中。
content
simulation model.The main
is
a
real time simulation model、terrain detection arithmetic、the strategy of steering control and
logical estimation of shift change for 3D environment application. Key
丝啦¨+掣(喁o
2.2速度模型和传动系模型 过程中的动力学方程为:
发动机转速‘JO/r・min。
圈2发动机外特性及部分负荷特性转矩曲线
(4)
接受用户的输人,包括汽车模型的加速、制动、离合、 转向以及换挡操作等。
直线行驶是汽车行驶过程中最基本的运动方 式,在直线行驶过程中,汽车速度的变化与汽车的驱 动力E、滚动阻力E、坡度阻力t、风阻力%有关, 根据汽车行驶过程中力的平衡关系。汽车直线行驶
2007年第4期 (总第189期)
农业装备与车辆工程
AGRICULTURAL EQUIPMENT&VEHICLE ENGINEERING
No,4
2007
(Totally 189)
【设计与研究】
基于DirectX的汽车动力学模型研究木
荆旭1,王龙江2,柴山1,焦学键1,王树凤1,刚宪约1
(1.山东理工大学交通与车辆工程学院,山东淄博255049;2.山东理工大学机械工程学院,山东淄博255049) 摘要:介绍了一种基于DirectX技术的汽车模拟驾驶仿真操纵模型,对建模与仿真、DirectX及碰撞检测等技术在汽 车模拟驾驶操纵模型方面的应用进行了探索与尝试,并重点介绍了汽车在3D环境下的实时数字仿真模型、地形检 测算法、汽车转向控制策略以及换档过程的逻辑判断。 关键词:DirectX;破5-真;模拟驾驶;虚拟现实;汽车
2.School of Mechanical Engineering,Shandong University of Technology,Zibo Abstract:This paper presents
as a
255049 China)
comprehensive vehicle model for automobile emulated driving based on DirectX.Technologies such modeling and simulation、DireetX and collision detection were tested in the building of visual automobile emulated driving
为发动机转速。M.0为发动机转矩。
(1)
式中:秽为汽车速度(m/s);g为重力加速度(9.8m/s‘); 6为旋转质量转换系数;G为整车总重量(N);M。 为驱动轮转矩(N.m);r为车轮滚动半径(m);i。为 主传动比;i。为各挡传动比;卵,为汽车传动系效率; /为滚动阻力系数;i为爬坡度;G为风阻力系数;A 为汽车迎风面积(m’);%=3.5v为汽车速度(kin/h)。
哦(i--0,1,2,3)为转矩与转速关系拟合系数耽,
在计算出各阶拟合系数后.可求出发动机的全 负荷特性,其中发动机转速在稳定行驶过程中由下 式(m/s)。
(2)
汽车在制动过程中。脚刹制动器或手刹所产生 的制动力E是影响汽车速度的重要因素。综合上述 情况.汽车行驶动力学方程为:
万方数据
荆旭等:基于DirectX的汽车动力学模型研究
2007年4月
产臁 襄燃I口l匝亟蛔l软件模拟
l DirectX予程序l
Windows Win32应用程序
,_、
暑
杰
、一
i
I.耋l薹l薹l砉l喾
4暑舞苗£IQ
言磊苗岩盘
警 鼎 辑
硬件抽象层
硬件:视频、音频、输入……
图1 DirectX组件构成及其与Win32的关系
为了得到在不同油门开度下的发动机输出转 矩.在实验中将汽车的油门开度分为N+1个不同的 固定油门开度值Ot。Ot,Ot,…Ot、,当汽车未点火或熄火 时Ot。:0,发动机输出转矩哆。。=0。图2所示某种型 号轿车所用发动机不同油门开度时的发动机外特性 及部分负荷特性中的转矩曲线,在某个固定油门开 度%下的转矩拟和多项式为: 丝何=%+qjn。+吻n。2+%n。3
Words:DirectX;simulation;emulated
driving;virtual reality;automobile
0引言
把虚拟现实技术应用于汽车驾驶模拟系统中, 实现汽车驾驶的虚拟训练,从而可以体验、认识和学 习现实世界中的汽车驾驶。基于虚拟现实技术的汽 车驾驶模拟系统将极大地提高系统的主动性、交互 性和沉浸感等性能.可以提供逼真的虚拟驾驶环境。 汽车驾驶模拟系统中要求仿真的内容很多,其 中汽车动力学操纵模型的建立是一项非常重要的内 容。要做好汽车动力学仿真。建立正确的汽车动力 学模型和采用正确的操纵策略是关键。本文基于虚 拟现实技术的汽车虚拟驾驶系统研究,基于汽车动 力学知识、DirectX技术以及汽车的真实驾驶环境, 建立三维场景下的汽车动力学仿真操纵模型。
参考文献
式中P。为脚刹踏板行程,k。为制动力系数。制 动力的最大值为汽车根据当前地形环境产生的最大 制动力附着力。
3汽车数据模型和仿真模型
3.1汽车数据模型 汽车的数据模型就是将某种型号汽车的车辆整 体参数、发动机输出扭矩拟和参数以及汽车传动比 系数等数据制作为单独的数据文件,在仿真过程中 通过选择不同的汽车数据文件可以在虚拟驾驶中使 用不同的车辆进行仿真。 3.2汽车速度仿真模型 在汽车速度仿真模型中,传统的方法是采用经 典欧拉法来仿真计算.首先假设汽车的加速度在一 个仿真时间步长孔内保持不变,可求得dv(k)/dt, 即汽车行驶加速度a(k)。则汽车行驶速度的离散化 模型为:v(k+1)=秒(尼)+o(忌)正 (12) 为提高计算精度,本仿真模型采用四阶Runge— Kutta法.常用的四阶Runge—Kutta方法采用的积分 方程如下:
1
应用程序可以直接访问计算机的硬件。DirectX组件 构成及其与Win32的关系见图1所示。DirectX下 面有两个层丽,分别是硬件模拟层和硬件抽象层。通 过上述组件的协同工作,就可以开发出3D多媒体 仿真系统。 使用DirectX,软件开发者便可得益于与开发的 硬件无关性,还能直接访问操作硬件。其提供应用程 序与硬件间坚实可靠的接口操作,减少对硬件的设 置并能体现硬件优越性能。通过这些接口,软件开发 者在不需要了解硬件的详细资料的状况下也能充分 发挥硬件特性。 DirectX由多个组件构成,本系统主要用到下面 两个组件: DirectXGraphics:提供三维图形开发接口,包括 DirectDraw和Direct3D两个三维开发组件,另外还 包括一个D3DX库.其提供大量的接口方法,可大大 简化图形编程开发的难度。在本仿真模型中,汽车行 驶方向的变化计算和地形检测使用其中的两个接口 方法来实现: Directlnput:提供接受外部设备(鼠标、键盘、游 戏杆及力反馈设备等)输入的接13: 本仿真系统利用DirectX Graphics组件控制汽 车模型在三维空间中的变换;利用DirectInput组件
发动机部分负荷特性是指在某个油门开度Ot 下的发动机输出转矩Me。设某时刻油门踏板未完全 踩下,油门开度为仪,假设仪坐落于(dHd,]区间内, 由线性插值法可得发动机在此油门开度时的发动机 输出转矩: £。一为离合器最大有效行程,£。为离合器当前有效 行程,M,为传递到驱动轮上的发动机的扭矩。 2.3水平转向系模型 在主动型汽车驾驶模拟训练系统中。要确定汽 车的坐标位置,不仅需要求出汽车行驶的速度,还需 要求出汽车行驶的当前方向。假设汽车在平行于路
式中:j=l,2,…,N。 (3)
百dv=盘(f一咒一哆一只一%)
(6)
汽车的传动系负责将发动机的扭矩传递到驱动 轮胎,中间要经过离合器、变速箱以及主减速器。在 模型中,假定离合器传递扭矩是线性传递的。离合器 传递的扭矩和传递到驱动轮的扭矩为: 鸭=必(L。一一L。)儿。。。
M,e=M iot'grL (7) (8)
采用四阶Runge—Kutta法的汽车速度的离散仿 真模型为: K。=口(后)t K2=al(k+1)I