新时达STEP系统调试说明
STEP机器人操作安全手册-新时达机器人
STEP机器人操作安全手册-新时达机器人STEP 机器人操作安全手册新时达机器人一、机器人操作前的准备工作1、环境检查在操作新时达机器人之前,必须对工作环境进行全面检查。
确保工作区域整洁,无杂物堆积,地面平整且干燥,以防止滑倒和绊倒事故。
同时,要保证工作区域有足够的照明,以便操作人员能够清晰地看到机器人的动作和周围的情况。
2、机器人检查仔细检查机器人的外观,查看是否有损坏、松动的部件或线缆。
检查机器人的关节运动是否灵活,有无异常噪音或卡顿现象。
确保机器人的控制系统、传感器和执行器等部件正常工作。
3、工具和设备准备根据操作任务的需要,准备好相应的工具和设备,并确保其处于良好的工作状态。
同时,要熟悉这些工具和设备的使用方法和安全注意事项。
4、人员培训所有参与新时达机器人操作的人员,都必须经过专业的培训,了解机器人的工作原理、操作方法和安全规程。
只有通过考核并获得相关资质的人员,才能进行机器人的操作。
二、机器人操作中的安全注意事项1、保持安全距离在机器人运行过程中,操作人员必须与机器人保持足够的安全距离。
严禁靠近正在运动的机器人手臂或其他部件,以免发生碰撞和挤压事故。
2、禁止随意触摸未经授权,任何人不得随意触摸机器人的控制面板、按钮和线缆等部件。
避免因误操作导致机器人失控或发生故障。
3、注意警示标识机器人工作区域通常会设置各种警示标识,如“危险区域”、“禁止入内”等。
操作人员必须严格遵守这些标识的指示,不得擅自进入警示区域。
4、避免多人操作为了避免操作指令混乱,同一时间内只能由一名经过授权的操作人员对新时达机器人进行操作。
5、监控机器人状态在操作过程中,操作人员要时刻监控机器人的运行状态,包括运动轨迹、速度、负载等参数。
一旦发现异常情况,应立即停止机器人的运行,并进行检查和处理。
三、机器人编程与调试中的安全措施1、离线编程在进行机器人编程时,尽量采用离线编程的方式。
这样可以在不影响机器人实际运行的情况下,对程序进行编写、修改和优化,降低安全风险。
新时达便捷调试手册

便捷调试方法:新式达的主板有很多参数,大多是对于有特殊要求的电梯,一般的电梯很少使用得到;下面以异步举例说一下调试的方法:A. 异步电梯配置:a.电梯是10/10层/站1.75m/s;b.主机转速1470转;c.编码器1024;d.井道内换速开关有两级(单层换速开关一级,双层换速开关一级);e.平层感应器是常闭(不在平层的时候接通,如果在平层的时候接通就是常开);f.开(关)门到位,安全触板,超载是常闭,其他轿内信号是常开;g.换速开关,限位开关是常闭;慢车调试:1. 电梯机械安装到位,安全,门锁接通,动作正常(特殊情况下可以短接,但必须保证安全);2. 换速开关,限位开关安装到位,工作正常(特殊情况下可以短接,但必须保证安全);3. 控制柜到主机U V W,抱闸接线正常;4. 编码器到PG卡的连接线必须牢靠,准确无误;5. 主板上对应的X5,X6必须点亮(特殊情况下可以短接,但必须保证安全);6. 主板参数设置:F6=1.75F7=1470F8=1024F11=10F25=设定X3,X4,X5,X6,X7,X8,X9,X10常闭F27=4239F182=2(其他参数保持出厂值,可以不用更改)另外:变频器的参数也要设置正常,和主板工作模式一致,7. 给控制柜上行信号,轿厢应该是上行,同样给下行信号,轿厢应该下行;否则调换主板输出的JP10.4Y与JP10.5;如果不能运行,则检查故障代码,根据故障说明排除问题;8. 检修运行,电梯运行的速度必须与设置的速度一致:如果设置速度时0.25m/s,实际的转速远远低于0.25m/s,主机抖动,则更换编码进变频器PG卡的A,B相(仅仅对于异步电梯);9. 监控主板的液晶或手持操作器,电梯上行的时候速度必须是+,如果下行是+,则调换主板JP8.与JP8.4或则调换JP7.1与JP7.3,JP7.2与JP7.4,保证上行时必须是+;否则主板会报22故障;10. 检修试运行,主机旋转正常,则整定完毕;快车调试:1. 电梯机械安装到位,安全,门锁接通,动作正常(不可以短接);2. 门机工作开关门正常,开关门到位信号工作正常接线正确;3. 平层感应器安装到位,工作正常;4. 平层插板垂直度,深度到位,没有误动作,不动作等;5. 换速开关,限位开关安装到位,工作正常;6. 随行通讯线接线正确,终端电阻短接正常;万用表测量:TXV-与TXV+,TXA+,TXA-的电压分别是24VDC,2.8VDC,2.6VDC左右,TXA+与TXA-是0.2VDC左右,TXA+与TXA-的电阻是120Ω左右;7. 主板上对应的X3,X4,X5,X6,X7,X8必须工作正常,平层位置的时候X9,X10不亮;检修向上运行时,应该是X10先动作,X9后动作,快到上端站的时候,X3动作,然后是X7动作,X5动作,同时保证X7动作后必须一直保持动作状态,甚至到X5动作后也要保持,其间不允许有一次复位;同样,检修向上运行时,应该是X9先动作,X10后动作,快到下端站的时候,X4动作,然后是X8动作,X6动作,同时保证X8动作后必须一直保持动作状态,甚至到X6动作后也要保持,其间不允许有一次复位;8. 监控主板的液晶或手持操作器,通过监控菜单,开门到位后:TX0,TX1,TX2,TX3必须是“-”,“*”,“*”,“*”,关门到位后:TX0,TX1,TX2,TX3必须是“*”,“-”,“*”,“*”;其他的TX*信号是“-”;9. 任何位置,进入井道自学习菜单,确认后转正常,电梯会自动返回到一楼,平层后开关门一次,然后电梯自动测楼层高度,到顶楼后,会自动停止运行;表示自学完成;打一下检修,然后转正常;10. 通过手持操作器登记电梯运行(如果试运行的时候,不想让电梯开关门,可以把主板的F165设置2),单层,双层,多层逐层运行,如果上行的时候,电梯不到平层,增大F56,冲过平层,减小F56,一般情况下10相当于100mm;同样下行通过F57调整,不到平层,增大F57,冲过平层,减小F57;11. 正常后,接好外呼通讯线,设置地址,测试其他功能;12. 调试完毕。
STEP系统调试说明

一.新时达电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1. 机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2. 运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)3. 矢量控制相关PI参数设置。
(比例增益,积分时间等)如果机械系统方面存在着问题,主板参数和变频器参数也只能是使舒适感更好一些,而无法根本改变机械缺陷。
三.舒适感的性能指标1. 电梯起动舒适感起动是否平稳,有无台阶感、振动等;2. 电梯高速运行中舒适感高速运行是否平稳,有无振动、晃动等;3. 电梯停车舒适感平层停车是否平稳可**有无制动感、振动等;以上三点舒适感须作重点考虑并调试。
四、电梯调试流程概述及要点1. 线路检查,包括:通电前线路检查,通电后线路检查2. 曳引机整定旋编安装,参数设置,曳引机自整定3. 慢车运行安全回路,门锁回路,上、下限位,上、下强慢4. 井道学习井道各开关,平层感应器,井道学习,井道学习数据保存5. 快车运行单层、双层、多层、顶层、底层运行,冲顶沉底试验6. 舒适感调试机械调整,运行曲线设定,速度环PI值,(电流环PI值)7. 功能检查按合同要求逐一测试各项标准功能和特殊功能,8. 平层调整平层精度测量记录,平层感应器插板调整,相应平层参数调整五.标准参数在实践中,我们总结出了一套标准参数,这就是下面我们所说的推荐参数,效果比较理想。
模拟量速度给定舒适感的调试一. SM-01主板相关参数的调整电梯准备运行,先打开抱闸,经F16(打开抱闸机械延时时间)后,开始按S曲线运行:起动起动过渡时间T0 匀加速F0 加速末过渡时间T1 匀速运行初减速过渡时间T2 匀减速F1 平层信号检测减速停车过渡时间T3 消号停车,经F17(释放抱闸机械延时时间)后,抱闸、开门。
参数号参数名称推荐值及范围参数范围F16 抱闸延时1 10(5~12) 电梯起动时,先打开抱闸,经过此延时后才给出速度。
新时达STEP系统调试说明书

一.新时达电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1. 机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2. 运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)3. 矢量控制相关PI参数设置。
(比例增益,积分时间等)如果机械系统方面存在着问题,主板参数和变频器参数也只能是使舒适感更好一些,而无法根本改变机械缺陷。
三.舒适感的性能指标1. 电梯起动舒适感起动是否平稳,有无台阶感、振动等;2. 电梯高速运行中舒适感高速运行是否平稳,有无振动、晃动等;3. 电梯停车舒适感平层停车是否平稳可**有无制动感、振动等;以上三点舒适感须作重点考虑并调试。
四、电梯调试流程概述及要点1. 线路检查,包括:通电前线路检查,通电后线路检查2. 曳引机整定旋编安装,参数设置,曳引机自整定3. 慢车运行安全回路,门锁回路,上、下限位,上、下强慢4. 井道学习井道各开关,平层感应器,井道学习,井道学习数据保存5. 快车运行单层、双层、多层、顶层、底层运行,冲顶沉底试验6. 舒适感调试机械调整,运行曲线设定,速度环PI值,(电流环PI值)7. 功能检查按合同要求逐一测试各项标准功能和特殊功能,8. 平层调整平层精度测量记录,平层感应器插板调整,相应平层参数调整五.标准参数在实践中,我们总结出了一套标准参数,这就是下面我们所说的推荐参数,效果比较理想。
模拟量速度给定舒适感的调试一. SM-01主板相关参数的调整电梯准备运行,先打开抱闸,经F16(打开抱闸机械延时时间)后,开始按S曲线运行:起动起动过渡时间T0 匀加速F0 加速末过渡时间T1 匀速运行初减速过渡时间T2 匀减速F1 平层信号检测减速停车过渡时间T3 消号停车,经F17(释放抱闸机械延时时间)后,抱闸、开门。
参数号参数名称推荐值及范围参数范围F16 抱闸延时1 10(5~12) 电梯起动时,先打开抱闸,经过此延时后才给出速度。
新时达机器人系统说明书

1.1机器人组成 (3)1.2机械本体说明 (3)1.2.1机械本体 (3)1.2.2机器人轴说明 (4)1.2.3各关节电机说明 (5)1.2.4各轴机械零点说明 (6)1.2.5机器人铭牌 (8)1.3电气控制柜说明 (9)1.3.1控制柜正面介绍 (9)1.3.2控制柜内部说明 (9)1.3.3控制柜背面说明 (10)1.3.4控制柜接线斜面板说明 (11)1.4示教器说明 (12)1.5连接线缆说明 (13)1.6机器人系统的吊装搬运方式 (14)1.6.1准备工作 (14)1.6.2 搬运和拆封 (15)1.6.3安装机器人控制系统 (18)1.6.4 机器人本体线缆连接 (19)1.6.5 机器人控制柜电源连接 (19)1.6.6机器人工作状态确认 (19)2机器人控制系统介绍 (20)2.1控制器说明 (20)2.2 STEP伺服说明 (21)2.3安全逻辑板说明 (27)2.4柜冷却装置说明 (28)2.5 I/O模块 (28)2.6 软件功能介绍 (29)3机器人标定和性能测试 (30)3.1.1标定工具DynCal (30)3.1.2标定过程 (30)3.2机器人性能测试 (30)3.2.1性能测试工具CompuGauge (31)3.2.2硬件安装及调试 (31)4故障处理及维护说明 (33)4.1示教器常见错误信息提示及处理方法 (33)4.2电气系统常见故障 (36)4.3机器人维护保养 (37)4.3.1 维护保养注意 (37)4.3.2 定期检修日程表 (37)4.3.3检修项目 (38)5安全注意事项 (52)5.1机器人安全防护装置 (52)5.1.1 安全防护装置预览 (52)5.1.2 紧急关断按键 (52)5.1.3 运行方式选择开关 (52)5.1.4 点动运行 (53)5.1.5 机械终端限位 (53)5.1.6 软件限位开关 (53)5.2 相关人员 (53)5.2.1 操作人员资格要求 (54)5.2.2设备操作规程的规定 (54)5.3培训 (54)5.4安全措施 (55)5.5检查 (56)1机器人系统1.1机器人组成1)机器人2)机器人控制柜3)连接线缆4)手持式示教器其中2和4可以合称为机器人控制系统,下图为一个标准机器人系统的部件连接示意图。
手持编程器使用手册

画面第三行显示为该电梯所在楼层。显示的值是相对值,由显示设置设定的 值不会在这里显示。
画面第四行的左边为电梯的此时的运行方向。“↑”表示电梯正在向上运行; “↓”表示电梯正在向下运行。该行的右边为电梯此时的运行速度。该速度值始 终为正值,正、负由方向表示。
画面流程如下图:
欢迎画面 (STEP electric)
ESC
Enter,←,→,↑,↓
登陆画面 (Input password) ESC Enter 状态画面 ESC Enter
功能选择 (Function)
ESC
Enter 监视画面 (Monitor) ESC
Enter 修改画面 (Parameter) ESC
这八个功能中英文对照如下表所示:
中文介绍
设置 F 参数画面 设置 B 参数画面 设置输入输出类型
设置楼层封锁 显示设置 更改密码
上传所有参数 下载所有参数
英文菜单名称
1 F Parameter 2 B Parameter 3 Input Type 4 Floor Lock 5 Display Set 6 Password Chg. 7 UP Load Para. 8 Dn Load Para.
英文菜单名称
Set Curve Feedbk Curve Err Record Run Record Shaft Data In State Out State Load Data
各选项的功能如下: Ⅰ、设定曲线(Set Curve):
该画面显示的是事先在程序中设定的电梯运行曲线。
Ⅱ、反馈曲线(Feedbk Curve): 该画面显示的是编码器反馈回来的电机运行速度曲线。
曳引新时达电梯一体机电气调试手册12-3-9

、调试流程框图……………………………………………………………………………………………:功能参数表………………………………………………………………………………………:故障代码说明重要提示:调试流程框图通电前检查控制系统电气线路安装完毕后,通电前必须对电气部分进行检查:应对照电气图纸,检查各部分的连接是否正确。
送电检查)检查控制柜内所有熔断器,)确认所有接线均正确无误后,将手持服务器连接至主板的控制柜开关拨到“检修”2.4V(2.2~2.5V)TXV+ TXV- TXA+ TXA-设置主板参数)控制系统正常通电后,为了方便接下来的调试,建议首先参照本手册附录值将全部参数设置一遍。
个别需根据实际情况调整的参数,可在相应步骤中根据具体的合同值或者参数名称电梯额定速度电机额定转速预设总层数检修速度驱动控制器规格减速开关级数井道自学习速度电机原点自学习将曳引机钢丝绳安全脱离曳引轮,电梯参数按表确认变频器输出相序UVW与电机相序对应,编码器连接正确,编码器屏蔽线已可靠固定整定完成后自动退到主菜单,抱闸在电机原点自学习完成之后,由于一个方向溜车的现象。
所以必须重新检查和设置合适的可以参照下表进行设置:慢车试运行及检修运行检查)通过慢车试运行的程序来检查电梯运行指令的方向与电机实际转动方向是否正确一致,试时电梯无法预知的转动而导致的损害。
) 检修运行检查通过以上步骤的调整,异,如果空载电流或者速度差异偏大,则必须在电梯带负载运行前重新校正。
以尽量避免由于电机检修单梯=== 00000018 = 挂上钢丝绳进行井道检修运行检查,逐层检查各层厅门,不得与轿厢部件干涉碰撞通讯线路检查确认一体机主板CAN1图8.1 SM-02-D板通讯终端电阻设置,按上或下按钮调整图8.2 SM-04-HRF板通讯终端电阻设置调整门机和光幕)断开控制柜SAD2)调整厅、轿门相关机械部件,确保不带电时开关门自由顺畅;监视状态井道楼层数据学习平层装置位置调整)轿厢与厅门地坎保持水平时,平层插板的上端高出下平层开关、下端低于上平层开关的长度均是采用压导板经此两孔将隔磁板安装于平层位置的导轨上须保证每层的隔磁板均居中于磁感应器内,以免轿厢运行时造成碰撞!注:上平层开关安装在下面,而下平层开关安装在上面。
GF21新时达调试说明 3(1)(1)(1)
货梯一体机控制柜调试参数表G8000003-CS/A编制: 校对:标准化: 批准:巨人通力电梯有限公司Giant KONE Elevator Co.r Ltd.20M年04月版本记录1用户界面操作说明E1板载操作界面I1. 1. I板载操作界面I1.1.2显示状态说明 11.2LCD手持操作鬆I1.2.1LCD手持操作歸酿示界面 21.2.2LCD手持操作器按键功能 21.2.3操作实例31.2. 3.1上电至电梯状态显示的操作31.2. 3.2功能状态切换51.2. 3.3査看监视状态方詰 61.2. 3. 4设置参数方法 61.2. 3. 5呼梯功能 B 2慢车调试2,1上电前检査92.2参数设置92,3电机调谐10 3快车调试3.1井道自学习113.2楼层显示设置113.3平层精度调整II3.4舒适感调试113.4. 1起动舒适感调试113. 4. 1. 1谒整零伺服PTD参数和励礎时间改善舒适感113. 4.1.2调整起劫时序改善舒适感123, 4.2运行过程中舒适感调试123, 4. 3停牢舒适感调试133. 4.4电梯运行曲线调整14 附录1功能参数表16 附录2故障代码及处理方案22G8000003-CS/A共小页第1页图L2貨样一体机1用户界面操作说明 1.1板载操作界面1.1.1板载操作器板载搠作界而由七段码显示器及按键组成°外祝如下图1. I 所示-图1」1.2 LCD 手持操作器LU )手持操作器由LCD 液晶捉示器和薄膜按健I 虾部分组成,手持操作器的外观如下图1. £所示,货样一体机控制拒调试参数表G 8000003 <S/A 共26页第之页1.2.1 LCD手持操作器显示界面1,2. 2 LCD手持操作器按键功能G800Q003-CS/A负暢一体机1.2.3操作实例1.2.3. 1上电至电操状态显示状态的操作当将手持操作器和主板接通之后,披瞪如下的步骤可以进入查看电梯运行状态;电梆法志显示其中,密码登录的界面操作挙例如下:(密码以初始密码1234为例)货梯一体机控制柜调试参数表G8000003-CS/A 共26页第4页顾序 按纏 操作器的显示上电凿码登录Enter密码賢录'□密码登录密码登衆B34按2y ;密码登录■ 234密码登录OOOOOSS= (WOiM[门顿闭台鼓i 次密码.说咬鬱码登录[1234说明密■始入完単和录成功,进入电崩状态显示界而货梯…体机GB000003-CS/A控搦相调试參数表共26页郊5页1.2. 3. 2功能状态切换在非故障充询页而状态下,按下F1攏可回到电梯状态曇示界而,按照如下流程图进行功能选热1.2. 3. 3査看监视状态方法1.2, 3.4设置養数方法黄様一体机碧宣車泪试参数表GB000003-CS/A 共26页第7页-现翳垣参数分类调试操作参数分类爲蠶羸参数按键以实现功能选择进入二级菜刑参数分类参散汇总控制参数复位_…签艶箜__F0= 0.550m/s2 「如速度斜宰』F1 0.550^2,诚速度斜率FI1 巳3预设总层数查呑F参数的債可査看上1个参麹可直看上10个参:故__箜塹匚虹FU = £.预设总层数 ,___婪艶凰__=_ 下ii=E、顼设总层数 , _―鹭塾眞____FU = |2.预毁总层皴, ____经翌―_ pH = m,預设总层敎,參数査看状态按ENTER諷进入編国状态.可以修改卷妝向上数字加I向下数字滅1向左移动到参数克位向右移动丑參数低位1-2. 3.5呼梯功能该功能可以监初到哪些楼层已登记指令,那些楼层的外呼已登记;还可以通过该界而直接在手持操作器中登记指令和召唤,只有在非检修状态才能登记召唤/指令。
STEP一体机现场调试简易说明

SUPEX-COMFORT 调试手册简明一. 电机自学习调试前准备:a.变频器,控制柜,曳引机接地应良好,零地分开;b.安全回路,门锁回路导通(具体短接可参考图纸),板子指示灯X32,X33应点亮;c.检查动力线,电机三相线及安全门锁回路对地情况,若有请逐一排除;d.通讯线插头CD,HD可先不插上,避免接地引起主板通讯口烧坏;e.短接限位(HA-J01和HA-J06,HA-J02和HA-J06),保证板子指示灯X12,X13点亮;f.若强换开关没装可先短接掉(HA-J03和HA-J06,HA-J04和HA-J06),板子指示灯X4,X5点亮(1.75m/s以上电梯还需短接二级强换开关);g.检查抱闸110DC接线。
电机自学习步骤:a.吊轿箱,钢丝绳挂起,曳引机空载;b.轿顶打正常,控制柜打检修,此时手持操作器应显示“检修”;c.控制柜送电后,先查看通讯灯闪烁是否正常,若闪烁很慢说明系统有故障,可通过手持操作器参看故障名称,并排除故障;通讯/故障指示灯d.通过手持操作器正确设置如下参数;参数号参数名称参数设置值备注F06 电梯额定速度1750mm/s(★) 根据电机铭牌设置F07 电梯额定转速168rpm(★) 根据电机铭牌设置F08 编码器每转脉冲数2048PPR(★) 海德汉1387编码器F12 检修速度250mm/s 0-500mm/sF25 输入类型1(X0-X15 输入点的常开或常闭设置)12531F26 输入类型2(X16-X31 输入点的常开或常闭设置) 1F27 输入类型3(TX0-TX15 输入点的常开或常闭设置)4255F28 输入类型4(TX16-TX31 输入点的常开或常闭设置)0F32 电梯一体化驱动控制器规格选择2(★) 5.5KW设成0;7.5KW 设成1;11KW设成2;15KW设成3;18.5KW设成4;22KW设成5;30KW设成6;37KW 设成7。
e.确认编码器电缆与PG卡连接可靠到位;f.确认电机三相动力线UVW与控制柜一一严格对应;g.设置参数零速积分F205=0、电流环增益F216=1.00(慢车学完后改回原值);进入电机学习菜单,按ENTER 键确定,此时操作器会显示“自学习”字样,然后按住检修上行或下行按钮(即检修给使能和方向),电机整定开始,如整定结束,故障指示灯未亮则整定成功;h.如果整定结束,故障指示灯亮,操作器显示65号故障,则需调换电机任意两相,不需要重新自整定;i.正常情况下,按住检修上行按钮做自整定时也曳引轮顺时针转动(人面向曳引轮站立),按住检修下行按钮做自整定时曳引轮逆时针转动,如果方向反掉的话自学习肯定会报电机相序反向故障,需调换电机任意两相重新自整定;j.自整定结束后可查看磁极相位角F228的值;k.重复自学习三次,若所得F228的值偏差在10度以内,则自整定有效;l.试检修运行,观察电梯一体化驱动控制器速度反馈。
STEP一体机调试简明

SUPEX-COMFORT 调试手册简明一. 电机自学习调试前准备:a. 变频器,控制柜,曳引机接地应良好,零地分开;b. 安全回路,门锁回路导通(具体短接可参考图纸),板子指示灯X32,X33应点亮;c. 检查动力线,电机三相线及安全门锁回路对地情况,若有请逐一排除;d. 通讯线插头CD ,HD 可先不插上,避免接地引起主板通讯口烧坏;e. 短接限位(HA-J01和HA-J06,HA-J02和HA-J06),保证板子指示灯X12,X13点亮;f. 若强换开关没装可先短接掉(HA-J03和HA-J06,HA-J04和HA-J06),板子指示灯X4,X5点亮(1.75m/s 以上电梯还需短接二级强换开关); g. 检查抱闸110DC 接线。
电机自学习步骤:a. 吊轿箱,钢丝绳挂起,曳引机空载;b. 轿顶打正常,控制柜打检修,此时手持操作器应显示“检修”;c. 控制柜送电后,先查看通讯灯闪烁是否正常,若闪烁很慢说明系统有故障,可通过手持操作器参看故障名称,并排除故障;手持操作器与主板连接处 通讯/故障指示灯d. 通过手持操作器正确设置如下参数;e.确认编码器电缆与PG卡连接可靠到位;f.确认电机三相动力线UVW与控制柜一一严格对应;g.设置参数零速积分F205=0、电流环增益F216=1.00(慢车学完后改回原值);进入电机学习菜单,按ENTER 键确定,此时操作器会显示“自学习”字样,然后按住检修上行或下行按钮(即检修给使能和方向),电机整定开始,如整定结束,故障指示灯未亮则整定成功;h.如果整定结束,故障指示灯亮,操作器显示65号故障,则需调换电机任意两相,不需要重新自整定;i.正常情况下,按住检修上行按钮做自整定时也曳引轮顺时针转动(人面向曳引轮站立),按住检修下行按钮做自整定时曳引轮逆时针转动,如果方向反掉的话自学习肯定会报电机相序反向故障,需调换电机任意两相重新自整定;j.自整定结束后可查看磁极相位角F228的值;k.重复自学习三次,若所得F228的值偏差在10度以内,则自整定有效;l.试检修运行,观察电梯一体化驱动控制器速度反馈。
新时达现场调试指导性文件(iAStar-S3电梯专用变频器)

新时达现场调试指导性文件(iAStar-S3电梯专用变频器) 编制编制日期 2009年4月现场调试指导性文件STEP ?(iAStar-S3电梯专用变频器) 页码标准编号 STEPiAStar-S3电梯专用变频器调试指导性文件 iAStar电梯专用变频器配有以下PG卡(AS.T002配推挽或者集开编码器;AS.T007配SINCOS编码器;AS.T010配带UVW相编码器)高级菜单A参数A01 软件版本号 99.99参数初始化;99.98清除故障代码;88.88不检测变频器风扇;88.89检测变频器风扇例版本号445.01 从左到右第一位:电压等级 4=400V 2=200V第二位:硬件号第三位:功率等级0=2.2 1=3.7 2=5.5 3=7.5 4=115=15 6=18.5 7=22 8=30 9=37第四,五位软件版本A02 选择语言 0 英语 1 汉语A03 同步电机整定 4 相位整定 0 正常运行状态同步电机自整定步骤:1。
轿箱内加半载2(将参数C02=0,C13=1。
3(将参数A03=44(检修运行,抱闸会打开,电机中注入电流,微微转动。
5(整定完成后,变频器运行信号会自动撤消,抱闸会合上,此时观察到A03还是4,切换到其它参数后再切换回来,A03变3,说明整定完成,将A03=0后可以正常运行。
6(整定好的参数记录在E11中,建议整定5次以上,角度相差10度之内说明整定没有问题。
注意:A03=4:电机自整定自整定时自动辨识编码器的幅值和中心偏移量。
B14、B15对应编码器A、B相的中心值,标准值为33000左右。
进入自整定时,B14、B15为标准值,整定完成后显示测量值。
测量值与标准值的偏差在1000以内可认为合格;自整定结束,如整定成功,A03=3;手动将A03=0;如采用这组修正值,需将A03=7;采用标准值,需将A03=8;A03=7 采用编码器修正值设置A03=7后A03自动归0。
新时达调试资料
STEP串行调试注意事项串行系统调试说明(以F板为例)一.电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1.机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2.运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)?3.矢量控制相关PI参数设置。
(比例增益,积分时间等)匀加速F0??????F16 抱闸延时1 10(5~12)电梯起动时,先打开抱闸,经过此延时后才给出速度。
一般不调,起动时有明显延时即可。
如果带闸起动,则调大此延时;如果起动有倒溜,可适当调小。
F17 抱闸延时2 5(5~12)电梯停止时,先降为零速,经过此延时后才合上抱闸。
一般不调,停车时有明显延时即可。
如果抱闸动作太快,停车太急,可适当调大;如果抱闸太慢,停车回溜,可适当调小,也可调抱闸机械结构。
F0 加速斜率a1 50(40~65)此值越小,加速越平稳,太小则效率不高。
越大加速越急:①太急则用户感觉不太舒适,②太急易引起变频器出现“OC”过电流故障。
一般1m/s为40;1.5~1.8m/s为50;2.0m/s为60较为合适。
F1 减速斜率a2 50(40~65)此值越小,减速越平稳,太小则效率不高;越大减速越急:①太急则用户感觉不太舒适,②太急易引起变频器出现“OV”过电压故障。
一般1m/s为40;1.5~1.8m/s为50;2.0m/s为60较为合适。
F2 S曲线T0 130(130~160)T0:起动到加速段初的过渡时间曲线,调大起动更平稳。
此时段电梯速度很低,太长易出现电动机拖不动电梯的现象致使变频器出现“PGO”故障,或过电流“OC”故障,尤其轿厢重载满载时。
F3 S曲线T1 110(100~120)T1为加速段末到最高速度间的过渡时间曲线,T2为最高转速到减速段初的过渡时间曲线。
T1和T2对舒适感没有明显的影响,一般不调。
新时达调试指导说明

调试指导说明通电前检查控制系统电气安装完毕后,必须对电气部分进行检查:1. 应对照使用说明书和电气原理图,检查各部分的连接是否正确。
2. 检查强电部分和弱电部分是否有关联。
用万用表欧姆档检查不同电压回路之间电阻、对地电阻应为∞。
3. 请认真检查控制柜电源进线与电机连线是否正确。
避免上电后烧毁变频器。
4. 检查控制柜壳体、电动机壳体、轿厢接地线、厅门接地线是否可靠安全接地,确保人身安全。
▲注意:柜壳体与电动机壳体要一点接地。
通电后检查1. 合上总电源开关。
若相序继电器KAP 上绿灯亮,则表示相位正确。
若绿灯不亮,关闭总电源,调换任意两相相位然后重新上电。
2. 检查控制柜中隔离变压器TCO 各端子电压,是否在其标称范围内。
3. 在上述步骤正确的前提下,进行如下步骤:1)合上熔丝FUn(n=1,2,3······);2)合上开关电源控制开关;开关电源TPB 得电,同时主板得电工作。
开关电源各端子电压如下:表4-1 开关电源各端子电压端子L~N 24V~COM电压220±7%VAC 24.0±0.3VDC3)将控制柜急停开关复位,安全回路接通,主板输入点对应LED 灯亮。
4)检查如下回路:◆检查门锁回路是否正常;◆检查门区信号、上下限位信号是否正常;◆手持编程器上电梯工作状态此时应显示“检修”;如有不正常请做相应检查并改正。
系统参数设定1.变频器参数(电机参数自学习)根据现场实际情况正确设定系统参数,具体参数的定义和设置方法请参考正确设定系统参数,具体参数的定义及设置方法请参考第三章和附录B。
1)在进行慢车调试之前,必须正确设定所配置变频器的参数;2)不同型号的变频器的具体参数的设置可以参看附录或变频器说明书;3)基本电机参数的设定可以通过铭牌输入。
电机参数自学习参看所使用的变频器使用说明书。
电机参数自学习的步骤:关掉电梯电源,按下控制柜上的急停开关,将控制柜中自动运行/检修开关拨至检修位置; 确认主机抱闸线已正确接在控制柜ZQ1、ZQ2 端子上;吊起轿厢,移去主机曳引轮上的钢丝绳,并加以保护,以防磨损;确认主机曳引轮及其他运转部件在运行时无阻碍;跨接线:保证安全回路102-114 为通路,门锁回路120-118 为通路;将主板上的输出接触器Y0,Y1,Y2,Y3 和其公共端上对应的线拆下,并作好标记,合并在一起,用绝缘胶带缠好,以防短路。
新时达调试指导说明_图文(精)
调试指导说明通电前检查控制系统电气安装完毕后,必须对电气部分进行检查:1. 应对照使用说明书和电气原理图,检查各部分的连接是否正确。
2. 检查强电部分和弱电部分是否有关联。
用万用表欧姆档检查不同电压回路之间电阻、对地电阻应为∞。
3. 请认真检查控制柜电源进线与电机连线是否正确。
避免上电后烧毁变频器。
4. 检查控制柜壳体、电动机壳体、轿厢接地线、厅门接地线是否可靠安全接地,确保人身安全。
▲注意:柜壳体与电动机壳体要一点接地。
通电后检查1. 合上总电源开关。
若相序继电器KAP 上绿灯亮,则表示相位正确。
若绿灯不亮,关闭总电源,调换任意两相相位然后重新上电。
2. 检查控制柜中隔离变压器TCO 各端子电压,是否在其标称范围内。
3. 在上述步骤正确的前提下,进行如下步骤:1合上熔丝FUn(n=1,2,3······;2合上开关电源控制开关;开关电源TPB 得电,同时主板得电工作。
开关电源各端子电压如下:表4-1 开关电源各端子电压端子L~N 24V~COM电压220±7%VAC 24.0±0.3VDC3将控制柜急停开关复位,安全回路接通,主板输入点对应LED 灯亮。
4检查如下回路:◆检查门锁回路是否正常;◆检查门区信号、上下限位信号是否正常;◆手持编程器上电梯工作状态此时应显示“检修”;如有不正常请做相应检查并改正。
系统参数设定1.变频器参数(电机参数自学习根据现场实际情况正确设定系统参数,具体参数的定义和设置方法请参考正确设定系统参数,具体参数的定义及设置方法请参考第三章和附录B。
1在进行慢车调试之前,必须正确设定所配置变频器的参数;2不同型号的变频器的具体参数的设置可以参看附录或变频器说明书;3基本电机参数的设定可以通过铭牌输入。
电机参数自学习参看所使用的变频器使用说明书。
电机参数自学习的步骤:关掉电梯电源,按下控制柜上的急停开关,将控制柜中自动运行/检修开关拨至检修位置;确认主机抱闸线已正确接在控制柜ZQ1、ZQ2 端子上;吊起轿厢,移去主机曳引轮上的钢丝绳,并加以保护,以防磨损;确认主机曳引轮及其他运转部件在运行时无阻碍;跨接线:保证安全回路102-114 为通路,门锁回路120-118 为通路;将主板上的输出接触器Y0,Y1,Y2,Y3 和其公共端上对应的线拆下,并作好标记,合并在一起,用绝缘胶带缠好,以防短路。
as320-三维互动调试系统介绍

上海新时达(STEP)电梯变频器AS320售后三维互动调试系统简介一、系统目的1.个性化产品结构展示,促进客户对产品的了解,提升销量;2.标准化产品售后安装流程,降低售后安装和调试的成本;二、功能结构1.语言选择:满足全球各个区域和国家的语言差异的需求;特点:自由选择多语种2.标准的安装流程1)结构拆卸:真三维720度任意旋转放大缩小,无死角的展示拆卸的任何一个部位,标准化产品的拆卸与安装步骤;特点:将工作更加趣味化,就像玩游戏置身于真实的三维空间;2)配线说明:根据现场不同PG卡选择对应的控制方式、PG卡、高低电平以及控制方式,系统自动判断出每一种方式,一对一的将系统图纸接口与产品端子对应;特点:不同现场不同选择,相同的只是更加任性话的操作;3)通电前检查:变频器与控制柜安装好之后,在通电前一遍基础检查;特点:自由的选择+视频的播放二合一,才是解决问题最好的方法;4)调试准备:调试前对调试工具(手操器)的了解也是至关重要,所以准备工作也是不能省去的;特点:除了手操器的基本介绍之外,我们还设定了通用的两个实例,通过实例的学习和实际操作的练习,让工程师对此产品能够更加得心应手;5)参数设定:有了前面了解的基础,才开始真正的参数设定,同步和异步电机有着本质的区别,所以分门别类的选择是必须的;特点:基本参数设定都不是问题,更重要的是如电梯自整定(自学习)成功与否的判断以及不同电梯梯速出现的不同信息的呈现,需要就是更多智能化的判断;6)首次运行:当我们按住上/下行方向键时,电梯轿厢实际运行的方向和手操器反馈数据的方向是我们首次运行检查和调试解决的重点;特点:根据上下行反馈的实际的数据,给出相应的解决方法;7)舒适感调整:启动、运行、停车种种不同情况出现现象不同,处理的方法也不一样;通过三维动画有效的说明现象,通过建议调整的参数解决问题;特点:出现的问题配合三维动画一目了然,建议调整的参数清晰具体;3.常见故障列表:将常见的故障进行汇总成库,故障代码、故障显示、故障原因、解决放方法等一一列出,通过简单的搜索来实现快速查找;特点:快速有效的查找故障原因和解决方案,其解决方案中的内互动容有文字、图片、互动视频;。
新时达机器人操作软件使用说明书-B

本使用说明书中,与安全相关的内容,使用下列标记。附有安全标记的叙述、 内容重要,请务必遵守。
!危险 错误使 错误使用时,会引起危险,可能导致人身轻度或重度伤害
和设备损坏。
重要 用户需要遵守和重点注意的部分。
I
SPD-12-00-B
上海新时达机器人有限公司
3.2.1 设置 .................................................................................................................................... 8 3.2.2 用户管理 ............................................................................................................................ 9 3.2.3 配置 .................................................................................................................................. 11 3.2.4 回零 .................................................................................................................................. 14 3.2.5 IO 监视 .............................................................................................................................. 19 3.3 工作空间和信号配置界面 ...................................................................................................... 22 3.3.1 工作空间配置................................................................................................................... 23 3.3.2 信号配置 .......................................................................................................................... 30 3.4 变量维护界面.......................................................................................................................... 39 3.4.1 基本变量设置................................................................................................................... 39 3.4.2 坐标系设置....................................................................................................................... 42 3.4.3 工具设置 .......................................................................................................................... 50 3.5 工程界面.................................................................................................................................. 60 3.5.1 功能描述 .......................................................................................................................... 60 3.5.2 界面描述 .......................................................................................................................... 60 3.6 程序界面.................................................................................................................................. 65 3.6.1 功能描述 .......................................................................................................................... 65 3.6.2 界面描述 .......................................................................................................................... 66 3.6.3 程序显示 .......................................................................................................................... 67 3.7 机器人位置界面 ...................................................................................................................... 70 3.7.1 功能描述 .......................................................................................................................... 70
新时达一体机控制系统各功能模式设置汇总
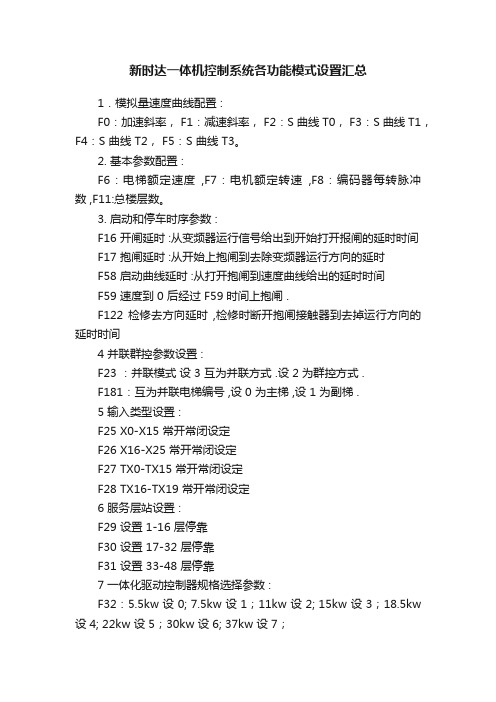
新时达一体机控制系统各功能模式设置汇总1.模拟量速度曲线配置 :F0:加速斜率, F1:减速斜率, F2:S 曲线 T0, F3:S 曲线 T1,F4:S 曲线 T2, F5:S 曲线 T3。
2. 基本参数配置 :F6:电梯额定速度,F7:电机额定转速,F8:编码器每转脉冲数 ,F11:总楼层数。
3. 启动和停车时序参数 :F16 开闸延时 :从变频器运行信号给出到开始打开报闸的延时时间F17 抱闸延时 :从开始上抱闸到去除变频器运行方向的延时F58 启动曲线延时 :从打开抱闸到速度曲线给出的延时时间F59 速度到 0 后经过 F59 时间上抱闸 .F122 检修去方向延时,检修时断开抱闸接触器到去掉运行方向的延时时间4 并联群控参数设置 :F23 :并联模式设 3 互为并联方式 .设 2 为群控方式 .F181:互为并联电梯编号 ,设 0 为主梯 ,设 1 为副梯 .5 输入类型设置 :F25 X0-X15 常开常闭设定F26 X16-X25 常开常闭设定F27 TX0-TX15 常开常闭设定F28 TX16-TX19 常开常闭设定6 服务层站设置 :F29 设置 1-16 层停靠F30 设置 17-32 层停靠F31 设置 33-48 层停靠7 一体化驱动控制器规格选择参数 :F32:5.5kw 设 0; 7.5kw 设 1;11kw 设 2; 15kw 设 3;18.5kw 设 4; 22kw 设 5;30kw 设 6; 37kw 设 7;8 自动运行设置 :F33 自动运行间隔F34 自动运行次数设置完 F33 和 F34 后请在轿内登记指令信号来触发自动运行功能9 抱闸开关检测 :F36 设 0 无抱闸开关检测设 1 中国地区标准设 2 香港地区标准10 司机外呼蜂鸣闪烁功能 :F43 设 0 无蜂鸣无闪烁设 1 有蜂鸣无闪烁设 2 无蜂鸣有闪烁设 3 有蜂鸣有闪烁11 串行通讯地址 :F44 串行通讯本机地址,小区监控时需设置,以便远程电脑区分主板 .12 设置开门 :F50 开门允许 1-16 层.F51 开门允许 17-32 层.F52 开门允许 33-48 层.F53 后门允许 1-16 层.F54 后门允许 17-32 层.F55 后门允许 33-48 层.13 KMC 检测模式 :F60 :设 0 KMC 前置 ,常通 ,不检测 .设 1 KMC 前置 ,常通 ,粘连检测 .设 2 KMC 前置 ,每次运行后通断 ,粘连检测 .设 3 KMC 后置 ,每次运行后通断 ,粘连检测 .14 打滑保护时间限制 :F62快车全程运行加 10S 和 45S 取小值范围在 20S-45S 之间15 楼层显示代码 :F65-F112:对应 1-48 层楼层显示16 强迫关门开门保持时间 :F117:强迫关门或者开门保持按钮(TX18) 按过后的开门保持时间设定值17 残疾人开门保持时间 :F118:残疾人开门保持时间设定值18 防捣乱功能 :F120:设 0 无此功能设 1 按光幕动作计算 (连续 3 层停靠没有光幕动作 )设 2-64 防捣乱指令数 (根据轻载开关来检测 )19 强迫关门功能 :F121设 0 不开通设 1 开通20 召唤分类功能 :F123设 0 只有前门召唤 (地址 1-48)设 1 有前门召唤 (地址 1-48)和后门召唤 (地址 49-96)设 2有前门召唤 (地址 1-48)和残疾人召唤 (地址 49-96)设 3 有前门召唤 (地址 1-32),后门召唤 (地址 33-64) 和残疾人召唤 (地址 65-96)21 前后门控制模式 :F128设 0 前后门分开控制 (有前后门操纵箱 )设 1 前后门一起控制 (只有一个操纵箱 )22 提前开门功能 :F129设 0 没有提前开门和开门再平层功能设 1 有提前开门功能设 2 有开门再平层功能设 3 既有提前开门又有开门再平层功能23 开关门力矩保持功能设定 :F130设 0 无开关门力矩保持设 1 有开门力矩保持设 2 有关门力矩保持设 3 有开关门力矩保持设 4 运行中有关门力矩保持24 NS-SW 功能设定 :(对应 02 板输入 TX16)F137NS-SW 功能时设定服务楼层 1-16 层F138NS-SW 功能时设定服务楼层 17-32 层F139NS-SW 功能时设定服务楼层 33-48 层25 称重模式 :(匹配 STEP称重装置 )F164设 0 系统不处理称重设1 称重信号通过CAN 通讯输入主板,超满载信号也通过CAN 通讯输入 .设 2 称重信号通过 CAN 通讯输入主板 ,超满载信号通过轿箱板输入26 调试不开门模式 :F165设 0 调试时电梯开门设 1 检修时禁止门动作设 2 调试时电梯不开门设 3检修时禁止门动作和调试时电梯不开门27 速度增益 :F180 对速度给定峰值的增益出厂值 100028 井道中减速开关的级数 :F182井道中安装有几道强迫减速开关该参数设置不当会导致井道学习失败29 井道学习速度 :F183模拟量给定时井道自学习速度 .30 井道学习 :1.电梯检修开到最底层平层 ;2.触发手持操作器中的井道学习菜单3.转自动 ,电梯会以井道学习速度上行 ,直到最顶层停止4.井道学习完成 ,可以运行快车 .31 井道学习不成功的原因 :1.自学习的插板数和总楼层数不一样2.平层插板太长或者太短:(平层插板长度+平层开关间距)/2 的距离小于100mm 或者大于900mm ;3.平层区太长或太短:(平层插板长度- 平层开关间距)/2的距离小于10mm 或者大于200mm32 减速开关级数( F182)与实际安装减速开关数不一致 ;5.减速开关的距离不符合规定;33 井道数据含义(通过监控界面) :1: 下端站平层基准位置 0 mm2: 2 楼平层离开下端站平层位置 (mm)3: 3 楼平层离开下端站平层位置 (mm)4: 4 楼平层离开下端站平层位置 (mm)64: 64 楼平层离开下端站平层位置 (mm)65: 平层插板的长度 (以2楼的插板为基准 ,mm)66: 平层感应器间距 (mm)67: 上行 1 级减速开关到上端站的距离 (mm)68: 上行 2 级减速开关到上端站的距离(mm)69: 上行 3 级减速开关到上端站的距离 (mm)70: 上行 4 级减速开关到上端站的距离 (mm)71: 下行 1 级减速开关到下端站的距离 (mm)72: 下行 2 级减速开关到下端站的距离 (mm)73: 下行 3 级减速开关到下端站的距离 (mm)74: 下行 4 级减速开关到下端站的距离 (mm)34 同步电机自整定 :触发手持操作器中电机自学习菜单,检修上行,从电机负载侧看,电机应该顺时针转,如反,可交换主机 V , W 相,整定完毕会自动上闸,整定出的角度储存在参数F228 中。
新时达调试指导说明概论

调试指导说明通电前检查控制系统电气安装完毕后,必须对电气部分进行检查:1. 应对照使用说明书和电气原理图,检查各部分的连接是否正确。
2. 检查强电部分和弱电部分是否有关联。
用万用表欧姆档检查不同电压回路之间电阻、对地电阻应为∞。
3. 请认真检查控制柜电源进线与电机连线是否正确。
避免上电后烧毁变频器。
4. 检查控制柜壳体、电动机壳体、轿厢接地线、厅门接地线是否可靠安全接地,确保人身安全。
▲注意:柜壳体与电动机壳体要一点接地。
通电后检查1. 合上总电源开关。
若相序继电器KAP 上绿灯亮,则表示相位正确。
若绿灯不亮,关闭总电源,调换任意两相相位然后重新上电。
2. 检查控制柜中隔离变压器TCO 各端子电压,是否在其标称范围内。
3. 在上述步骤正确的前提下,进行如下步骤:1)合上熔丝FUn(n=1,2,3······);2)合上开关电源控制开关;开关电源TPB 得电,同时主板得电工作。
开关电源各端子电压如下:表4-1 开关电源各端子电压端子L~N 24V~COM电压220±7%VAC 24.0±0.3VDC3)将控制柜急停开关复位,安全回路接通,主板输入点对应LED 灯亮。
4)检查如下回路:◆检查门锁回路是否正常;◆检查门区信号、上下限位信号是否正常;◆手持编程器上电梯工作状态此时应显示“检修”;如有不正常请做相应检查并改正。
系统参数设定1.变频器参数(电机参数自学习)根据现场实际情况正确设定系统参数,具体参数的定义和设置方法请参考正确设定系统参数,具体参数的定义及设置方法请参考第三章和附录B。
1)在进行慢车调试之前,必须正确设定所配置变频器的参数;2)不同型号的变频器的具体参数的设置可以参看附录或变频器说明书;3)基本电机参数的设定可以通过铭牌输入。
电机参数自学习参看所使用的变频器使用说明书。
电机参数自学习的步骤:关掉电梯电源,按下控制柜上的急停开关,将控制柜中自动运行/检修开关拨至检修位置; 确认主机抱闸线已正确接在控制柜ZQ1、ZQ2 端子上;吊起轿厢,移去主机曳引轮上的钢丝绳,并加以保护,以防磨损;确认主机曳引轮及其他运转部件在运行时无阻碍;跨接线:保证安全回路102-114 为通路,门锁回路120-118 为通路;将主板上的输出接触器Y0,Y1,Y2,Y3 和其公共端上对应的线拆下,并作好标记,合并在一起,用绝缘胶带缠好,以防短路。
新时达STEP系统调试说明书
一.新时达电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1. 机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2. 运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)3. 矢量控制相关PI参数设置。
(比例增益,积分时间等)如果机械系统方面存在着问题,主板参数和变频器参数也只能是使舒适感更好一些,而无法根本改变机械缺陷。
三.舒适感的性能指标1. 电梯起动舒适感起动是否平稳,有无台阶感、振动等;2. 电梯高速运行中舒适感高速运行是否平稳,有无振动、晃动等;3. 电梯停车舒适感平层停车是否平稳可**有无制动感、振动等;以上三点舒适感须作重点考虑并调试。
四、电梯调试流程概述及要点1. 线路检查,包括:通电前线路检查,通电后线路检查2. 曳引机整定旋编安装,参数设置,曳引机自整定3. 慢车运行安全回路,门锁回路,上、下限位,上、下强慢4. 井道学习井道各开关,平层感应器,井道学习,井道学习数据保存5. 快车运行单层、双层、多层、顶层、底层运行,冲顶沉底试验6. 舒适感调试机械调整,运行曲线设定,速度环PI值,(电流环PI值)7. 功能检查按合同要求逐一测试各项标准功能和特殊功能,8. 平层调整平层精度测量记录,平层感应器插板调整,相应平层参数调整五.标准参数在实践中,我们总结出了一套标准参数,这就是下面我们所说的推荐参数,效果比较理想。
模拟量速度给定舒适感的调试一. SM-01主板相关参数的调整电梯准备运行,先打开抱闸,经F16(打开抱闸机械延时时间)后,开始按S曲线运行:起动起动过渡时间T0 匀加速F0 加速末过渡时间T1 匀速运行初减速过渡时间T2 匀减速F1 平层信号检测减速停车过渡时间T3 消号停车,经F17(释放抱闸机械延时时间)后,抱闸、开门。
参数号参数名称推荐值及范围参数范围F16 抱闸延时1 10(5~12) 电梯起动时,先打开抱闸,经过此延时后才给出速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.新时达电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1. 机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2. 运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)3. 矢量控制相关PI参数设置。
(比例增益,积分时间等)如果机械系统方面存在着问题,主板参数和变频器参数也只能是使舒适感更好一些,而无法根本改变机械缺陷。
三.舒适感的性能指标1. 电梯起动舒适感起动是否平稳,有无台阶感、振动等;2. 电梯高速运行中舒适感高速运行是否平稳,有无振动、晃动等;3. 电梯停车舒适感平层停车是否平稳可**有无制动感、振动等;以上三点舒适感须作重点考虑并调试。
四、电梯调试流程概述及要点1. 线路检查,包括:通电前线路检查,通电后线路检查2. 曳引机整定旋编安装,参数设置,曳引机自整定3. 慢车运行安全回路,门锁回路,上、下限位,上、下强慢4. 井道学习井道各开关,平层感应器,井道学习,井道学习数据保存5. 快车运行单层、双层、多层、顶层、底层运行,冲顶沉底试验6. 舒适感调试机械调整,运行曲线设定,速度环PI值,(电流环PI值)7. 功能检查按合同要求逐一测试各项标准功能和特殊功能,8. 平层调整平层精度测量记录,平层感应器插板调整,相应平层参数调整五.标准参数在实践中,我们总结出了一套标准参数,这就是下面我们所说的推荐参数,效果比较理想。
模拟量速度给定舒适感的调试一. SM-01主板相关参数的调整电梯准备运行,先打开抱闸,经F16(打开抱闸机械延时时间)后,开始按S曲线运行:起动起动过渡时间T0 匀加速F0 加速末过渡时间T1 匀速运行初减速过渡时间T2 匀减速F1 平层信号检测减速停车过渡时间T3 消号停车,经F17(释放抱闸机械延时时间)后,抱闸、开门。
参数号参数名称推荐值及范围参数范围F16 抱闸延时1 10(5~12) 电梯起动时,先打开抱闸,经过此延时后才给出速度。
一般不调,起动时有明显延时即可。
如果带闸起动,则调大此延时;如果起动有倒溜,可适当调小。
F17 抱闸延时2 5(5~12) 电梯停止时,先降为零速,经过此延时后才合上抱闸。
一般不调,停车时有明显延时即可。
如果抱闸动作太快,停车太急,可适当调大;如果抱闸太慢,停车回溜,可适当调小,也可调抱闸机械结构。
F0 加速斜率a1 50(40~65) 此值越小,加速越平稳,太小则效率不高。
越大加速越急:①太急则用户感觉不太舒适,②太急易引起变频器出现“OC”过电流故障。
一般1m/s为40;1.5~1.8m/s为50;2.0m/s为60较为合适。
F1 减速斜率a2 50(40~65) 此值越小,减速越平稳,太小则效率不高;越大减速越急:①太急则用户感觉不太舒适,②太急易引起变频器出现“OV”过电压故障。
一般1m/s为40;1.5~1.8m/s为50;2.0m/s为60较为合适。
F2 S曲线T0 130(130~160) T0:起动到加速段初的过渡时间曲线,调大起动更平稳。
此时段电梯速度很低,太长易出现电动机拖不动电梯的现象致使变频器出现“PGO”故障,或过电流“OC”故障,尤其轿厢重载满载时。
F3 S曲线T1 110(100~120) T1为加速段末到最高速度间的过渡时间曲线,T2为最高转速到减速段初的过渡时间曲线。
T1和T2对舒适感没有明显的影响,一般不调。
T2调得太大易出现冲层现象。
F4 S曲线T2 110(100~120)F5 S曲线T3 110(100~130) T3为减速段末到停车间的过渡时间曲线,调大停车更平稳。
此时段电梯速度很低,太长易出现电动机拖不动致使变频器出现“PGO”故障,或过电流“OC”故障,尤其轿厢重载、满载时。
F21 平层调整73(56~90) 因为光电开关和磁开关动作灵敏程度不一样(★注:同一台电梯的平层插板必须长度一致。
)如果第一个平层开关插入平层插板时有台阶感,平台状F21调小;凹进状F21调大。
二.变频器相关参数的调整电梯运行时的振动或抖动可用变频器相关参数调整,主要分为以C5-07为分界的高速区和低速区。
1.低速区:包括0速→ C5-07起动段和C5-07 →0速停车段。
如有抖动(或振动),则将C5-03调大↗,C5-04调小↘,效果更好一些。
2.高速区:即从起动段C5-07 →恒速→ 停车段C5-07如有抖动(或振动),则将C5-02调大↗,C5-01调小↘,效果更好一些。
参数名称推荐值参考范围C5-01 15 12~20C5-02 0.5 0.4~0.6C5-03 30 20~55C5-04 0.5 0.3~0.6C5-07 8 3~154. 层起动有倒溜,C5-03调大一点↗,可消除倒溜,但一般C5-03不宜大于55。
5. 在机械方面没有问题的情况下,如果高速或低速时的抖动(振动),调整相关比例和积分增益均无明显变化,则有“电气共振”的可能。
可适当调一下滤波时间H3-12和C5-06,然后再重新调整舒适感。
参数名称推荐值参考范围备注C5-06 0.004 0.004~0.008 一般不调H3-12 0.04 0.04~0.08 一般不调6.如果C5-07=5HZ,而抖动发生在8HZ或10HZ处,调试人员在轿厢中仍感觉是低速段发生的抖动(振动),但是用C5-03和C5- 04调节仍消除不了。
此时可设C5-07为10HZ或12HZ,再重新用C5-03和C5-04来调,即可消除该点的抖动(振动)。
三、机械相关因素的调整1.导轨:a.导轨表面平整度;b.导轨安装垂直度;c.导轨之间连接头处理。
导轨垂直度和两导轨平行度应控制在国标(GB)规定的范围以内。
如果误差太大,则会影响高速运行时的电梯舒适感,会出现抖动或振动,或在某些位置处轿厢左右有晃动。
导轨连接头处理不好,会使电梯运行在某些固定位置处出现台阶感。
2.导靴松紧程度导靴太紧起动易有台阶感,停车易有制动感;导靴太松运行时轿厢中易有晃动感。
如果导靴是滑动式的,则导靴与导轨之间应留有少量间隙。
如果没有间隙,甚至导靴紧蹭导轨面,会使电梯在起动和停车时出现振动或台阶感。
调试时,可在轿顶上,用脚左右用力晃轿厢,如轿厢能明显在左右方向可以少许位移即可。
3.钢丝绳张紧均匀度钢丝绳张紧不均匀,会出现电梯运行时某几根受力绷紧,某几根很松受力而抖动或振动,对电梯起动、高速运行、停车都有影响。
调试时,可将电梯停在中间楼层,在轿顶上用手以同样的力,拉每一根钢丝绳。
如果拉开距离大致相同,则说明该钢丝绳张紧均匀;如果拉开距离不一样,则必须让安装人员调整钢丝绳张紧均匀度。
另外,钢丝绳在安装以前盘旋捆扎,内有回复扭应力,直接安装的话,电梯运行时容易产生振动。
所以钢丝绳安装之前应先充分释放这种回复扭应力。
4.轿厢安装紧固、密封电梯高速运行时,整个轿厢要受到很大的作用力。
如果轿厢支架或轿厢壁等处某个部位没有紧固好,则当电梯高速运行时,该部位处很容易有相对错动,使轿厢产生振动。
高速运行中,轿厢有时会出现风鸣共振声,多与轿厢安装紧固度、轿厢密封度及井道有关。
5.是否有防机械共振装置:a. 曳引机搁置钢梁下垫橡胶垫;b. 可在轿厢钢丝绳绳头处用木头夹头或其他类似装置也有利于振动的消除。
c. 目前,有些电梯为了追求装潢效果,轿厢采用了新颖轻质材料,使轿厢质量较轻,易产生“机械共振”,尤其是高层高速电梯。
出现此种现象时,可在轿厢处适当加一些负载改变轿厢的固有频率,可消除机械共振。
6.曳引机有时曳引机由于装配不当,涡轮蜗杆或齿轮之间啮合不好;或使用时间长了,涡轮蜗杆或齿轮之间磨损较大,会出现电梯加速或减速时有轴向窜动,导致加速或减速时有台阶感。
7. 轿厢平衡问题有时由于设计或安装等原因,导致轿厢质量不平衡而向一侧倾斜,电梯运行时,导靴紧蹭导轨面,在运行中有抖动或振动感。
此时,可在轿厢质量较轻的一侧加重块测试。
8.其他曳引轮、导向轮平行度、运行时抱闸间隙调整等模拟量和数字量比较摸拟量参数配置:主板:驱动模式F24=1参数名称推荐值可调范围加速斜率F0 50 40~65减速斜率F1 50 40~65S曲线T0:F2 130 130~160T1:F3 110 100~120T2:F4 110 100~120T3:F5 110 100~130上平层精度调整F56=50下平层精度调整F57=50单层减速距离SS1双层减速距离SS2 不起作用多层减速距离SS3变频器参数设置(安川616G5或676GL5) C1-01=0 d1-04=0C1-02=0 d1-05=0C2-01=0 d1-06=0C2-02=0 d1-07=0C2-03=0 d1-08=0C2-04=0 d1-09=0H3-02=100% H3-03=0H3-12=0.042. 数字量参数配置:主板:驱动模式F24=0此时,加速斜率F0,减速斜率F1上平层调整F56,下平层调整F57没有实际意义,保留出厂值即可S曲线T0,T1,T2,T3在速度给定为数字段速给定中,决定着加速时系统可以响应的截车时间。
⑴如果单层可运行到满速:T0 30单层减速距F45=150 T1 0双层减速距F46=150 T2 0多层减速距F47=150 T3 0⑵如果双层可运行到满速:T0 30单层减速距F45=170 T1 40双层减速距F46=300 T2 0多层减速距F47=300 T3 0⑶如果双层运行不到满速:T0 30单层减速距F45=190 T1 40双层减速距F46=320 T2 50多层减速距F47=480 T3 0注:①单层减速距F45,双层减速距F46,多层减速距F47,这几个参数的调整是根据相对应速度时电梯平层停车前的爬行情况;如果爬行太长,则调小;如果冲过层,则说明相应减速太小,调大一些使平层停车前有一点爬行即可。
平层精度调整,数字量时如果上下平层都不到或都冲过层,可将爬行速度适当加大或减小;其他情况则视平层开关和平层插板相对关系调整位置。
也可根据C1-02、C2-03、C2-04参数值调整平层精度。
变频器参数设置:推荐值调整范围C1-01 2.5 2.0~3.0C1-02 2.5 2.0~3.0C2-01 1.2 1.0~1.5C2-02 0.8 0.8~1.0C2-03 0.8 0.8~1.0C2-04 1.0 1.0~1.5D1-04=1.5 (爬行速度) D1-05=10 (检修速度) D1-06=30 (单层速度) D1-07=40 (双层速度) D1-08=50 (多层速度) D1-09=0 (不用)H1-03=3 (多段速1) H1-04=4 (多段速2) H1-05=5 (多段速3)系统应用注意事项请重视串行通讯回路的正确接线方法接线、换线等情况,均请注意记录相关线号,以免错接外呼板接线请注意插头线号与进柜端的线号对应关系,正确接线。