双手动作操作分析图
IE七大手法及案例

防呆法之 自动原理
3.自动原理 以各种光学、电学、力学、机构学、化学等原理来限制某些动作的执行或不 执行,以避免错误之发生。目前这些自动开关非常普遍,也是非常简易的 “自动化”之应用。 (1)以“浮力”的方式来控制 例:抽水马桶之水箱内设有浮球,水升至某一高度时,浮球推动拉杆,切断
水源。 (2)以“重量”控制的方式来完成 例:电梯超载时,门关不上,电梯不能上下,警告钟也鸣起。 (3)以“光线”控制的方式来完成 例:自动照相机,光线若不足时,则快门按不下去。 (4)以“时间”控制的方式来完成 例:洗手间内的“烘手机”,按一次只有“一分钟”,时间一到自动停止。
防呆法之 自动原理
(5)以“方向”控制的方式来完成 例:超级市场内进口及出口之单向栏栅,只能进不能出。或只能出不能进。 (6)以“电流”用量的方式来完成 例:家庭的电源开关皆装置保险丝,用电过量时,保险丝就熔断,造成断电。 (7)以“温度”控制的方式来完成 例:家庭内冷气机之温度控制,冷度够时,自动停止,温度上升时,自动开启
双手法 动改法
IE七大手法简介
授人以鱼,不如授人以渔!
名称 动改法 防呆法 五五法 双手法
人机法
流程法 抽查法
目的 改善人体动作的方式,减少疲劳使工作更为舒适、更有效率. 如何避免做错事情,使工作第一次就做好的. 借着质问的技巧来发掘出改善的构想. 研究人体双手在工作时的过程,借以发掘出可改善之地方.
判断以下防呆用的是什么原理?
治具上面贴有 不一样的颜色
相符原理
机器工作时需手同时下 压绿色按扭方可
保险原理
AB C
AB C
相符原理
断根原理
相符原理
断根原理
手机壳生产混穴的防呆改善
第五章 作业分析
第五章 作业分析5.1 作业分析概述 5.1.1作业分析的基本概念作业分析是研究如何使工人的操作以及工人和机器的配合达到最经济和最有效的程度。
这种分析是研究一道工序、一个工作地的工人(一人或多人)使用机器或不使用机器的各个操作活动。
它与程序分析的区别是:程序分析是研究整个制造的运动过程,分析到工序为止;作业分析是研究一道工序的运动过程,分析到操作为止。
1.操作的定义和分类1)定义 指为实现一定目的而进行的独立完整的劳动活动,是加工工序或作业的再分解,同时操作也可以进一步分解为若干个动作。
2)分类 基本操作、辅助操作 2.作业分析的含义及目的 1)含义作业分析是指通过对以人为主的工序的详细研究,使作业者、作业对象、作业工具三者科学地组合、合理地布置和安排,达到工序结构合理,减轻劳动强度,减少作业的工时消耗、缩短整个作业的时间,以提高产品的质量和产量为目的而作的分析。
2)目的作业分析的总目的是提高工作效率,减轻操作疲劳,使操作者能高效、舒适的工作。
具体有以下几点:(1)使作业内结构合理,删除多余无效的操作,使操作最有效,总数最少; (2)使人和机器能很好的协调配合工作,充分发挥人和机器的效能; (3)改进操作方法和工作地布置,减轻操作者的疲劳。
3.作业分析的方法作业分析根据不同的调查目的,作业分析可分为人机作业分析、联合作业分析和双手作业分析三种。
(1)在使用机器的作业中用人机作业分析,研究人和机器在作业过程时间上的协调配合关系,尽量减少人和机器的空闲时间,使人和机器的效能得到充分发挥。
(2)在有多个操作者共同完成的作业中用联合作业分析,目的是为了发现空闲与等待的作业时间,使共同工作中的每一个作业人员的工作负荷趋于平衡,以获得更好的较低的人工成本。
减少周期(程)时间。
(3)在以手工作业为主的作业中用双手作业分析,研究双手的动作及其平衡,左、右手5.1作业分析概述 5.2人机作业分析 5.3联合作业分析 5.4双手作业分析本章学习要点 理解人机作业分析、双手作业分析、联合作业分析的定义及主要用途;掌握人机作业分析图、双手操作分析图、联合作业分析图的基本结构及分析改进重点。
第四章操作分析

四、人机操作分析的案例分析
图4-2 滚齿加工的人机操作图(现行方法)
四、人机操作分析的案例分析
1.人机作业活动分析 由图4-2可以看出,人的空闲时间太多,人的时间利 用率仅为27%。则采用“5W1H”提问技术和 “ECRS”原则进行分析改进: 1)分析得取加工件为人的独立工作与装夹工件前后顺 序不紧密。 问:为什么是先取加工件再装夹工件后滚齿? 答:这是加工操作的习惯和顺序。 问:可不可以在机器滚齿过程中取加工件为装夹工作 做准备? 答:可以,这样还可以减少机器空闲时间。
四、人机操作分析的案例分析
2)分析得去毛刺和检查尺寸为人的独立工作。 问:为什么去毛刺和检查尺寸要在机器停止时进行? 答:过去一直是这样的。 问:有无改进的可能性? 答:有。 问:如何改进? 答:可将操作重排,在滚齿机加工齿轮时,可以对上 一个已加工好的齿轮进行去毛刺和检查尺寸的作业。 改进后的人机操作图如图4-3所示。
4.1 操作分析概述
4.操作分析的类型 操作分析的种类,按照不同的工序作业对象和调查目 的,可分为三类: (1)人机操作分析; (2)联合操作分析; (3)双手操作分析。
4.2 人机操作分析
一、人机操作分析概述
1.人机操作分析的概念 人机操作分析是应用于机器作业的一种分析方法,通 过现场观察记录一个操作周期(加工完一个零件的整 个过程称为一个操作周期或周程)内操作者和机器设 备在同一时间内的工作情况与相互关系,绘制人机操 作图并加以分析,研究人与机器的闲余时间,寻求合 理的操作方法,使人和机器的配合更加协调,充分发 挥人和机器的效率。
基础工业工程 第五章
(二)联合操作分析工具——联合操作分析图
• 画法 与人机操作分析图的画法基本相同。
2. 举例 某仓库内老张、老王的工作是将箱子搬到转运板 上,两人各负责一张转运板,每人摞满一个转运 板需要6分钟,然后由堆垛机将转运板上的箱子 进行码垛,一个循环需要3分钟,在一个循环中, 堆垛机将盛满箱子的转运板送过去,将另一块空 转运板带回来。
表示操作,伸手、握取、使用、放置等动作。 表示搬运、手移动的动作。
表示检验。
D
表示手的停顿、等待。
表示手持住工具、工件或材料等。
工作地布置图
轴 轴套
尺子
双手操作分析图(原方法)
左手 伸向轴
拿起一根轴
右手
伸向尺子 拿起尺子
带轴至尺
测量长度 持住
带尺至轴
测量长度 放下尺子 伸向轴套 拿起一根轴套
带至轴处
举例:
某工人操作设备加工某产品,作业程序及时间值如 下:装夹零件需要用3分钟、机器自动加工7分钟、卸 下零件2分钟,假如机器加工完毕后能够自动停止, 在不考虑工人从一台机器行走到另一台机器的移动时 间情况下,问工人能够看管几台设备,画出人机操作 图。
N=(t+M)/t = (5+7)/5 = 2.4(台)
运板 3
运板 1 运板 2 运板 3 运板 1 运板 2 运板 3
三、双手操作分析
(一)目的作用 1. 研究双手的动作及其平衡; 2. 发掘“独臂”式的操作; 3. 发现伸手、找寻等笨拙而无效的动作; 4. 发现工具、物料、设备等不合适的放置位置; 5. 使动作规范化。 (二)双手操作分析的工具——双手操作分析图 1. 画法
人员利用率 = 6/10 = 0.6
机器利用率 = 6/10 = 0.6
双手操作分析

南京工程学院实验报告课程名称基础工业工程实验项目名称双手操作分析学生实验班级工业工程132 实验学生姓名黄正雯实验学生学号 201131436 实验时间 2015年11月04日实验地点工程实践中心2-212 同组成员顾文慧实验成绩评定指导教师签字王云霞2015年11月04日一.实验目的1.掌握双手操作分析图的绘制方法。
2.学会对双手操作图所记录的现状进行分析,并能找出问题的所在,提出改善方案。
二.实验原理1、双手作业分析的含义生产现场的某些作业以工序的操作过程为研究对象,详细观察和记录其过程,重点是了解双手如何进行实际的操作,称为双手作业分析。
2、双手作业分析的特征(1)双手作业分析的主要对象是作业者的双手。
(2)双手作业分析是借助于双手作业图进行分析。
(3)双手作业分析简单明了,随时随地都可记录分析,清楚地反映出动作是否符合动作经济原则。
3、双手作业分析的作用(1)研究双手的动作及其平衡,左、右手分工是否恰到好处。
(2)发掘“独臂”式的作业。
(3)发现伸手、找寻以及笨拙而无效的动作。
(4)发现工具物料、设备等不合适的放置位置。
(5)使动作规范化,,并据此拟定作业规程,为编制标准化作业指导书提供参考。
4、双手作业分析图的作用双手作业分析图以双手操作为对象,采用标准流程图符号来记录其动作,表示其关系,并可指导作业者如何有效地运用双手,从事生产性的工作,提供一种新的动作观念,找出一种新的改善途径。
5、双手作业分析图的画法参考课本P65图2-10。
(1)图的左上部。
填写常规项目,包括编号、作业名称、地点、作业人员、作业的起点、终点(结束)、日期等。
(2)图的右上部。
填写工作地布置平面简图,并表明各种零件、工具、设备的位置。
(3)图的中间部分。
分别在左右两边填写左、右手动作的代表符号及动作说明。
(4)图的右下方。
对左、右手的动作进行统计。
6、绘制双手作业分析图时的注意事项。
(1)开始记录前,要对整个作业周期认真研究若干次。
基础工业工程动作分析
第 六 章 动 作 分 析
锡钎焊作业动素分析表
左手
动素
右手
分析要点
伸到工件处
抓起工件 成品堆放处
放开 等待 等待 移动 对准电路板 作业 放回焊丝 等待 等待
1
2 3 4 5 6 7 8 U 9U 10 11 12
伸到工件处
抓起工件 移动工件到锡钎焊处
放开 伸手到处
握取 移动电烙铁 对准电路板(定位) 锡焊丝作业(使用) 锡焊丝作业(使用) 移动电烙铁 放开电烙铁
1.3 动作分析的目的
第
六
➢(1)了解操作者身体各部分的动作顺序和方
章
法。
➢(2)了解以两手为中心的人体各部位是否能
动
尽可能同时动作,是否相互联系。
作
➢(3)明确各种动作的目的,动作过程中的必
分
要动作和不必要动作
析
➢ (4)了解在必要的作业动作中两手的平衡。
1.4 动作分析的用途
第
六
➢ (1)为减轻作业疲劳、提高工作效率而找出动作存在的
法.
➢ (7)提高能细微分析动作和判断动作好坏的动作意识。
2.1 观察作业动作的方法
第
六
目视动作观察法
章
➢动素分析法
动
作
影像动作观察法
分
析
➢慢速摄影分析
➢常速影像分析
2.2 动作分析的方法
第
六
方法
目的
分析对象
优点
缺点
章
能用最小
的单位分
动 作 分 析
目 视 动 作 观 察 法
人体各部分 在固定的作业 析动作,
等待
1.2 动作分析的定义
双手操作分析

实验三双手操作分析一、实验任务绘制电脑主机主板装配的双手操作分析图,并加以研究改进。
二、实验目的及训练要点1)掌握双手操作分析图的绘制方法2)学会正确描述、设计和改进工作地布置3)学会正确分析双手操作图所及记录的工作现状,并能找出存在的问题,提出改进方案。
三、实验原理1、双手操作分析的意义和作用双手操作分析是对由一名操作者所承担的作业内容进行记录和分析的技术。
通过双手操作分析可以考察操作者的操作方法和步骤是否合理,左右手的分工是否恰当,是否存在多余和笨拙的动作需要改进,工作地物料的摆放、工作地布置是否合理等等,经研究和改进,以达到降低劳动强度、提高作业效率的目的。
双手操作分析的作用,可以归纳为以下几点:1)研究双手的动作及其平衡问题2)发掘“独臂”式操作并改进3)发现伸手、找寻以及笨拙而无效的动作4)发现工具、物料、设备等不合适的放置位置5)使动作规范化2、双手操作分析图的画法绘制双手操作分析图应该注意以下几点:1 须深入操作现场,观察全部操作,了解情况,确定操作周程及其起点和终点2 画图前,首先要填写有关资料,比如工作名称、操作人员、研究人员等3 画出工作场所的平面布置图4 正式画图时,要边观察、边记录,一次观察一只手的动作。
通常先记录右手,将其动作用合适的符号及文字说明记录在右边。
左右手的同时动作应画在同一水平位置,并多次核对两只手的动作,使记录准确无误。
5 最后将左右手的动作分别进行统计,并记录在操作图的下方或者右下方。
四、实验设备、仪器、工具及资料1数码摄像机2计算机主机主板、CPU、CPU风扇、网卡、内存条3螺丝旋具多把、手套一副、料盒一个及其他。
五、实验内容及步骤本实验通过录像资料来观察装配电脑主机主板及其配件的工作过程,并由同学们自己动手操作电脑主板及其配件的组装过程,然后在熟练掌握了操作流程之后,将工作场地布置简图及双手操作过程记录下来,根据动作经济原则,并采用“5W1H”提问技术和“ECRS”分析原则进行改进。
精选基础工业工程知识点

说明
○
操作
□
检验
▽
受控制的存储
D
暫存或等待
搬运,运输
Presented By李成兵(Li ,Victor)
程序分析的四大技巧?
Presented By李成兵(Li ,Victor)
什么是操作分析?
提高質量和產能
以人為主的研究對象
操作者操作對象操作工具
科學地結合佈置和安排
減輕勞動強度,減少工時消耗
工作阶次分哪四类?
第一阶次:动作第二阶次:单元第三阶次:作业第四阶次:制程
Presented By李成兵(Li ,Victor)
何为“评比”?
Presented By李成兵(Li ,Victor)
何为正常速度?
30秒发52张牌
每小时走4.8km
Presented By李成兵(Li ,Victor)
什么是标准资料法?
定义:运用作业测定所制定的标准工时资料或经验分析整理,制定各类结构的动作单元正常时间的资料库,以后运用这些资料制定标准工时的方法。特点: 事前制定工时; 低成本; 工时一致性高; 无须评比。
空闲时间
总观察时间
X 100%
工作比率(%) =
工作时间
总观察时间
X 100%
绩效指标(%) =
标准时间
实际时间
X 100%
Presented By李成兵(Li ,Victor)
工作抽样可靠度与精度?
可靠度:指观察结果的可信程度。
式中 P观察事项发生率; n 观察次数; E决定精度; S相对精度。
什么是ECRS原则?
Presented By李成兵(Li ,Victor)
什么是5W1H提问技术?
动作分析教程

1.3 双手操作分析的作用
1.研究双手的 动作平衡 平衡
规范
5.使动作规 范化
放置 “独臂” 独臂”
4.发现工具、 物料、设备 等不合适的 放置位置
2.发掘独臂式操作
无效动作
3.发现伸手、 寻找以及笨拙 而无效的动作
1.4 基本动作符号介绍
符号 意义
操作,即握取、放置、使用、放手的动作
○
搬运 检查
1.6 双手操作分析图
• 1.6.3绘制双手作业分析图时的注意事项
1.开始记录前,要对整个作业周期认真研究若干次。 2.每个作业周期开始时,应以拿起新的工件的动作 作为开始记录的起点。 3.一次记录一只手的动作,从左手或右手开始均可, 一般应从工作最多的一只手开始,并将全部操作 记录完毕。 4.当左、右手同时动作时要记录在同一水平线上, 顺次发生的动作,要记录在 不同水平线上。要多 次核对左右手动作关系,使记录准确无误。
3.建立新方法 :通过以上分析,重新设计 一种夹具,支承件可在夹具底座上移动, 根据切成定长进行调整,然后夹紧,将开 切口放在支承件的右边。因此,轻轻一敲, 短头就断下来,没有必要再取出管子,用 双手来折断它了。改进后的双手作业图见 图2-4。
图2-4 将玻璃管切成定长的改良方法
4.实施: 采用新方法后,操作次数和动作次数由28个减为6 个,提高生产率133%,因为消除了“将玻璃管在夹具中定 位”这一费事的操作以后,现在的工作使工人满意多了。新 的方法不需要密切注视工件,因此工人的培训比较容易,工 人的疲劳也减轻了。
动作分析 Hands operation analysis
制作:NPW推进室 日期:2012.2.3
IE 工 作 研 究
方 法 研 究
女生双手投篮技术分析与图解
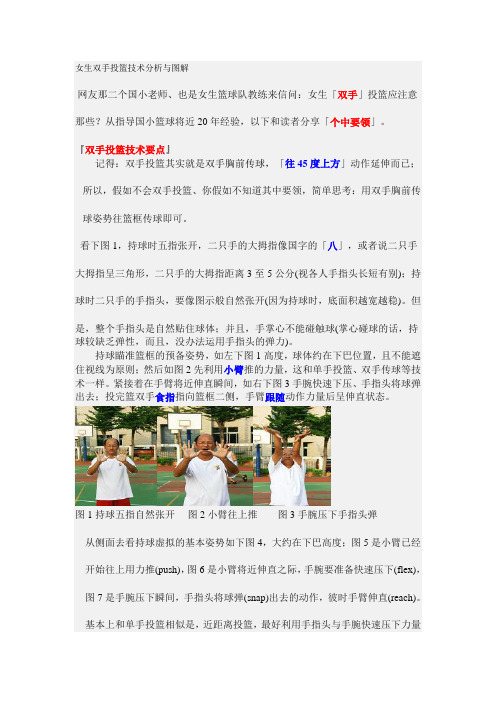
女生双手投篮技术分析与图解网友那二个国小老师、也是女生篮球队教练来信问:女生「双手」投篮应注意那些?从指导国小篮球将近20年经验,以下和读者分享「个中要领」。
『双手投篮技术要点』记得:双手投篮其实就是双手胸前传球,「往45度上方」动作延伸而已;所以,假如不会双手投篮、你假如不知道其中要领,简单思考:用双手胸前传球姿势往篮框传球即可。
看下图1,持球时五指张开,二只手的大拇指像国字的「八」,或者说二只手大拇指呈三角形,二只手的大拇指距离3至5公分(视各人手指头长短有别);持球时二只手的手指头,要像图示般自然张开(因为持球时,底面积越宽越稳)。
但是,整个手指头是自然贴住球体;并且,手掌心不能碰触球(掌心碰球的话,持球较缺乏弹性,而且,没办法运用手指头的弹力)。
持球瞄准篮框的预备姿势,如左下图1高度,球体约在下巴位置,且不能遮住视线为原则;然后如图2先利用小臂推的力量,这和单手投篮、双手传球等技术一样。
紧接着在手臂将近伸直瞬间,如右下图3手腕快速下压、手指头将球弹出去;投完篮双手食指指向篮框二侧,手臂跟随动作力量后呈伸直状态。
图1 持球五指自然张开图2 小臂往上推图3 手腕压下手指头弹从侧面去看持球虚拟的基本姿势如下图4,大约在下巴高度;图5是小臂已经开始往上用力推(push),图6是小臂将近伸直之际,手腕要准备快速压下(flex),图7是手腕压下瞬间,手指头将球弹(snap)出去的动作,彼时手臂伸直(reach)。
基本上和单手投篮相似是,近距离投篮,最好利用手指头与手腕快速压下力量即可;且别忘记是,手腕压下与手指头的弹,就是球体后下旋转的主要技术动作。
图4侧面观持球图5小臂往上推图6力量是往上图7伸直手腕压下『常见缺失与改善之道』大部分女生双手投篮常犯的错误毛病,大略有:一、持球时没有确实控制球体(我常讲叫「球没拿好」);所以,没办法控制投球的力量与方向。
二、持球瞄准篮框时的准备姿势,双手肘过度张开;以致后续变成出手力量,主要是由小臂与大拇指在用力。
工业工程之双手法
34
IE七大手法
双手法的注意事项: 应用双手操作分析时需要注意的问题:
对需要高度注意力,有可能出现安全和质量事故的操作,
在没有确保足够安全的前提下,不要轻易实施双手操作。 双手操作的对象物重量不能过重,通常应该在2kg以下。 双手操作的频率要适宜,且频率快慢能够控制和调节。
35
IE七大手法
结 束:吹好一件放入流水线 操作者:XXX
左手 等待右手取成品 同右手 同右手 取PE袋 等待 右手
一般工作台
作业员
左手
从流水线取成品(伴 有转腰动作)
右手
1
0
2 2 1
除产品静电
检查产品外观 将产品装入PE袋 将成品放回流水线 (伴有转腰动作)
0
2 2外观检测及除静电 方 法:改善后 开 始:双手空的 结 束:吹好一件放入流水线 操作者:XXX
23
IE七大手法
双手法实例讲解:改善方案设计 通过以上分析,重新设计一种夹具,支承件可在夹具底
座上移动,根据切成定长进行调整,然后夹紧,将开切口放
在支承件的右边。因此,轻轻一敲,短头就断下来,没有必 要再取出管子,用双手来折断它。改进后的双手作业图如下:
挡头 玻璃管 夹头
24
刻记号处
IE七大手法
工作:将玻璃管切成定长 开始:握住玻璃管 结束:做好一个 方法:现行
玻璃管 夹头 刻记号处
挡头
左手说明
将管子推向停档
时间 (min)
时间 (min)
右手说明 握住锉刀 用锉刀刻槽 将锉刀轻击管子 管端落入箱内
25
旋转管子
握住管子
IE七大手法
双手法实例讲解:改善效果分析 采用新方法后,操作次数和动作次数由28个减为6个,提
MOD模特排时发详解

page 13
基 本 动 作 ︿ 上 肢 动 作 ﹀
移 动
动
作 M
Lean Manufacturing 精益生产
移 动 动 作 M ︿ 续 ﹀
大臂动作 伴随肘的移动,小臂和大臂 把手伸向放在桌子前方的 M4 作为一个整体在自然状态下 零件; 伸出的动作,其时间值为 把手伸向放在略高于操作 4MOD,移动距离30cm 者头部的工具 注意:大臂移动时,也可能同时进行小臂、手、手指的 动作。 大臂尽量伸 在胳膊自然伸直的基础上, 把手尽量伸向工作台的侧 直的动作 再尽量伸直的动作。其时间 面;尽量伸直胳膊取高架 M5 值为5MOD,移动距离45cm 上的东西;坐在椅子上抓 。 放在地上的物体。 注意:
手 脚
腿
躯干
Lean Manufacturing 精益生产
Prepared By: Forest Zhang
page 3
人体各部位动作的最大频率
动作部位
手指 手 小臂 臂
最大频率(次/min)
204~406 360~430 190~392 99~344
脚
腿
300~378
330~406
Lean Manufacturing 精益生产
在MOD法的21种动作中,不相同的时间值只有“0,1,2,3,4,5,17,30”共8 个,这样只要有了动作表达式就能很快心算出动作时间值,所以“一 记就牢”;
采用MOD法不需测时和评比就能根据其动作决定正常时间,因此易 用于分析动作、评价工作方法、制定时间标准、平整流水线等; 在实际使用中,还可根据企业实际情况决定MOD单位时间值的大小 ; 用MOD法的时间值计算动作时间的精度并不低于其它PTS方法。
第5章 作业分析

右手
1 右手至螺帽
1 抓住一螺帽 2
移至作业位置
把螺栓与螺帽组装 2 2 把螺帽与螺栓组装
持住螺栓 1 把组件放进组件箱 3
3 转动螺帽
3 松开手回到初始位置
41
❖ 作业 ❖ P130 6,7 ❖ 某工人同时操作两台铣床,其操作流程如下:停机,松开夹
具,取出工件(0.2分);打毛刺并测量工件尺寸(0.2分); 将工件放入箱内,取下一个工件(0.2分);清洁夹具,将 工件装入夹具内,夹紧(0.2分);开机,进刀,拨动自动 走刀,观察(0.2分);步行到另一台机器(0.2分),操作 另一台机器。机器自动运行时间1.6分。试画出该工人操作 两台机床的单人多机程序图。
❖ 在这些情况下,每个工件的最小总成本通常是衡量 人机关系是否优化的标准。
23
5.3 联合作业分析
❖ 生产现场中,两个或两个以上操作人员同时对一台设备(一 项工作)进行操作,即为联合操作作业
❖ 目的 发掘空闲与等待时间 使工作平衡 减少周期时间 获得最大的机器利用率 合适的指派人员与机器 决定最合适的方法
❖ 一般用于分析1人操作1台机器或1人操作多台机器的情况 ❖ 人机程序图是记录在同一时间坐标上,表明作业者与机器的协调和配合
关系的一种图表
6
7
例1
❖ 一人工人操作一台机器,内容是:把装在模子的液 体材料(稍有粘性)投入机器后开始操作,经过一 定时间从机器取出模子,再从模子中取出成品,然 后再装入液体材料等反复性的作业。
• 加工
90秒
• 停止机器 8秒
• 取出模子(取模)12秒
• 等待放入模子——
9
10
❖ 现状:
周期时间为257秒,机器等待为118秒,因此,一 周期中的机器作业率为:(257-118)/257=54.09%
双手操作分析法
螺丝
散热膏机 绝缘粒 绝缘片
晶体
螺帽
成
散
热
品
片
固定胶
加工 治具
操作者
工作台
(4)图的中间分别记录左右手动作。要边观察边记录,一 次观察一只手的动作。通常先记录右手,将其动作记录于 图纸的中间靠右边,并反复补充、核对、改正,切勿遗漏; 再以同样的程序及要求记录左手动作于图纸的中间靠左边。 必须注意:左右手的同时动作应画在同一水平位置,并且 要多次核对左右手动作的关系,使记录的动作准确无误。
2.Where? ¦b ¤° »ò ¦a ¤è °õ ¦æ ? ¬° ¤° »ò ? ¦³ µL ¨ä ¥¦ §ó ¦X ¾A ªº ¦ì ¸m ©M ¥¬ §½
3.When? ¤° »ò ®É Ô °µ ¦¹ ¨Æ ? ¬° ¤° »ò ? ¦³ µL ¨ä ¥¦ §ó ¦X ¾A ªº ®É ¶¡ »P ¶ §Ç
人体之动作应尽量应用最低等级而能 得到满意结果为妥。
左右手能力之比为 9:10
目前所用键盘是 131.25:100
手指分别工作时,其各个负荷应按 照其本能,予以分配。
手别
左手
右手
手指别 小 无 中 食 食 中 无 小
能力顺序 8 7 5 3
12 4 6
发现工具、物料、设备等不合适的设置
DA
分解兩個以上目的物之動作
RL
放下目的物的動作
I
將目的物与規格標准相比較之動作
SH
為确定目的物之位置
ST
選定目的物之動作
PN
計划作業方法而延遲之動作
P
使用目的物時校正位置之動作
PP
避免對准而放置目的物之動作
H
保持目的物之狀態
精益管理之作业动作分析

图 3 双手同时作业
要达到双手同时作业,夹具的应用是必不可少的。见图 3(右) 为被夹具牢固固定的工件,将工件固定在夹具上,原本持住工件的左手 就可以被解放出来,参与零部件的装配。以产品主体与盖子粘在一起这 项简单作业为例。
2.动作经济管理
动作经济管理,就是依据动作经济原则,制定标准动作。通过这种 管理,让作业人员可以简单地做到标准动作,即用低的疲劳程度、少的 动作时间完成预定动作。
(1)保持动作的有效性 作业中要保持动作的有效性是完全可以做到的。但要注意,保持动 作的有效性需要在体力恢复之后才能实现。 ①计算用力水平与持续时间。 作业中需要用力时,尽量使力气维持在肌肉最大负荷的15%以下。 用力水平与持续时间见图 1。
吉尔布雷斯曾说过:“世界上最大的浪费,莫过于动作的浪费。”生 产活动实际上是由人和机械设备对零部件或材料进行的加工或检验组成 的,而所有的加工或检验又都是由一系列的动作所组成。
这些动作的快与慢、多与少、是否有效,就直接影响到生产效率的 高低。运用动作经济原则可以协助管理人员在不增加劳动强度的前提 下,更省力、快捷地工作,进而不断消除动作浪费。动作经济原则,见 表 1。
图 1 用力水平与持续时间
管理人员可以根据操作所需要的体力来确定员工所需的持续时间,
以保证其动作的有效性。 ②选择适合作业的操作者。 根据作业的性质来选择操作者的适合人群,如操作者的年龄、性别
等。女性肌肉的力量是男性的35%~85%;一般地,对于习惯右手的人 来说,左手的力量是右手的90%。在设计工具时,为了保证工作的有效 性,就要充分地考虑人体的力量因素。人体的肌力与年龄的关系,见图
作业分析PPT课件

作效率, 待加工件和已加工件应用标准容器盛装。
6
人 装夹工件
空闲
1‘03" 2′10″
机 空闲 车削
1‘03" 2′10″
卸车刀并外出更换或磨削
装刀
27′44″ 22″
– 锉刀的拿起放下是重复动作,可取消。 – 是否需要在玻璃管上作记号再刻划? – 为何不在玻璃管转动时即开始刻划,为何右手要等待? – 为何玻璃管必须抽出时才可折断,而不能在夹头内折断? – 为何玻璃管要抽出,而使其折断后再放入夹头时产生对准困难? – 双手的动作是否能减少?是否能协调的更好?
改进方法如下
现行方法
左手
右手
2
4
2
4
1
2
5
10
33
名称:检查轴的长度及装入套筒 开始:双手空的,用品在台上 结束:装好一只 工具:两只标准长的尺固定在台上
轴
套筒 标准长的尺 操作者
左手 同右 1 同右 1 带至轴左边尺2 同右 2 等待测量长度 1 同右 3 同右 3
右手
1
至近中央处离身 体最近一排的轴
1 取一只
16
现 行 联 合 作 业 图
工人 A
分离工件与余料 26“
上 料 6“ 调 整 并 切 割 14“
分离工件及余料 42“
工人 B 同A 空 闲 20 去 毛 刺 42“
空 闲 23“ 下 料 23“
下工件并分离 工 件 与 余 料 23
“
同A
上仍可用的余料 5‘
移动待割余料 7