第4章传递函数矩阵的状态空间实现
由传递函数求状态空间表达式根据前面介绍的微分方程与状态空间

b0sm b1sm1 L bm1s bm sn a1sn1 L an1s an
c1 c2 L cn
s 1 s 2
s n
(n m)
其中:
ci
lim G(s)(s
si
i )
X
1
(s
)
s
1
1
U (s)
X
2
(
s)
s
1
2
U (s)
X
n
(s)
s
1
n
U (s)
分解式第二部分表示状态变量与输出的关系, 输出y等于各状态变量与输入的线性组合,即式中 的C和D阵。
若传递函数等效为:
G(s)
b0
b1s n1 b2 s n1 s n a1s n1
bn1s an1s
bn an
式中
bi (bi aib0 ), (i 1,2, , n)
:
此时,式中的C阵和D阵可直接写成
sX 1(s) 1 X1 (s) U (s)
sX2
(s)
2
X
2 (s) U (s)
sX n (s) n X n (s) U (s)
x1 1x1 u
x2
2 x2
u
xn n xn u
Y (s) G(s)U (s) c1 U (s) c2 U (s) L cn U (s)
sn
a1s n1
b
an1s an
系统的微分方程为:
y (n) a1 y (n1) an1 y an y bu
则根据上节公式,可直接写出状态空间表达 式。即:
0 1 0
0
A
0
,
B , C 1
传递函数到状态空间的实现

传递函数到状态空间的实现在计算机科学领域中,函数通常被看作是一组输入和输出之间的映射关系。
在传递函数到状态空间的实现中,我们将函数转化为一种状态的组合,以便在状态空间中进行操作和分析。
状态空间是由一组状态和状态之间的转换关系组成的数学模型。
状态空间建模需要定义所有可能的状态集合,并描述状态之间的转换规则。
在这个模型中,函数可以被看作是状态之间的转换规则,其中每个状态都代表函数的一个输入和输出。
传递函数到状态空间的实现包括以下几个关键步骤:1.定义状态集合:根据函数的输入和输出,确定状态的取值范围,以及输入和输出状态的组合。
例如,如果函数有两个输入参数和一个输出结果,那么状态的取值范围将是所有可能的参数和结果的组合。
2.定义状态转换规则:根据函数的定义和用例需求,确定状态之间的转换规则。
这些规则可以是函数本身的定义,也可以是基于函数的输入和输出之间的关系定义的。
例如,如果函数的输入是一个正整数,输出是它的平方,那么状态转换规则可以是"当前状态为x,下一个状态为x*x"。
3.建立状态转换图:将状态和状态之间的转换规则绘制成状态转换图。
状态转换图是一种有向图,其中每个状态表示图的一个节点,状态之间的转换规则表示图的有向边。
根据函数的输入和输出,将状态转换规则应用到状态集合中的每个元素,构建状态转换图。
4.状态空间分析:在状态空间中分析函数的性质和行为。
通过遍历状态转换图,可以确定函数可能存在的问题或者潜在的错误。
例如,可以找出函数的输入参数中可能导致函数出错的特殊情况,或者确定函数是否存在无法到达的状态。
5.测试和验证:基于状态空间分析的结果,设计测试用例来验证函数的正确性。
根据状态集合和状态转换规则,选择具有代表性的输入组合来测试函数的各种可能行为。
通过比较函数的实际输出和期望输出,验证函数在不同状态下的正确性。
传递函数到状态空间的实现可以帮助我们更好地理解和分析函数的行为,发现隐藏的问题,并设计更有效的测试策略。
传递函数写状态空间表达式
传递函数写状态空间表达式【导言】在工程学科领域中,状态空间方法是一种十分重要的工具,在控制系统和信号处理方面得到了广泛应用。
在此过程中,传递函数和状态空间表达式便成为了其中不可或缺的两个环节。
本文将从传递函数转化为状态空间表达式这一点入手,给读者详细介绍其操作方法和其中的一些要点。
【一、传递函数和状态空间表达式概述】首先我们需要了解一些基本概念。
传递函数(Transfer Function)指的是在时域和频域之间建立约束关系的函数。
它描述了系统输入与输出之间的关系,是刻画线性时不变系统的一种有效方式。
状态空间表达式(State-Space Representation)指的是在某些符号和运算法则下,将一个时不变系统的整个历史过程表示为一个有限元素向量和矩阵的函数。
它描述了系统在时域和状态空间中的变化、状态之间的相互关系和控制变量和系统状态之间的关联。
传递函数与状态空间模型是描述线性时不变系统常用的两种方法。
传递函数的优点是简单、直接,能够快速得到系统的频率特性,但是只能表达一阶系统。
状态空间模型能够表达高阶、非线性系统,可以更好地反映物理实际。
【二、传递函数转化为状态空间表达式】将传递函数转化为状态空间表达式,原则上可以采用多种方法,本文将以矩阵分式形式为例进行讲解。
假设系统的传递函数为G(s),那么我们可以按照以下步骤进行转化:1、设系统的状态变量为x,输出变量为y,则系统的状态方程可以表示为:x' = Ax + Buy = Cx + Du其中A、B、C和D是系统的状态矩阵、输入矩阵、输出矩阵和耦合矩阵。
2、用连分式的形式表示传递函数:G(s) = D + C(sI - A)⁻¹ B3、将上式展开,得到:G(s) = D + CB⁻¹(sI - A)⁻¹ B4、令P(s) = (sI - A),则:G(s) = D + CB⁻¹P⁻¹(s)B5、对P(s)进行分解:P(s) = (s - λ1)Q1(s) ... (s - λn)Qn(s)其中λ1,λ2,...,λn是P(s)的特征值,Q1(s),Q2(s),...,Qn(s)是与特征值相关的特征向量矩阵。
mimo传递函数转化为状态空间模型matlab代码

MIMO传递函数转化为状态空间模型Matlab代码1. 介绍MIMO(多输入多输出)系统是指系统具有多个输入和多个输出的特性。
在控制系统领域中,MIMO系统的建模和分析是非常重要的。
传递函数和状态空间模型是两种常用的系统建模方法。
本文将介绍如何将MIMO系统的传递函数转化为状态空间模型,并给出相应的Matlab代码实现。
2. MIMO系统的传递函数表示MIMO系统的传递函数通常表示为一个矩阵,每个元素对应一个输入到一个输出的传递函数。
假设有n个输入、m个输出,则MIMO系统的传递函数可以表示为一个m×n的传递函数矩阵G(s)。
传递函数矩阵的元素可以用s表示,如G11(s)、G12(s)等。
3. MIMO系统传递函数到状态空间模型的转化方法MIMO系统的传递函数可以通过状态空间模型来表示。
状态空间模型的基本形式如下:\[ \dot{x}(t) = Ax(t) + Bu(t) \]\[ y(t) = Cx(t) + Du(t) \]其中,A是状态矩阵,B是输入矩阵,C是输出矩阵,D是传递函数零极点对应的矩阵。
MIMO系统的传递函数可以通过以下步骤转化为状态空间模型:1)将传递函数矩阵分解为多个SISO(单输入单输出)系统的传递函数;2)针对每个SISO系统,可以将其转化为状态空间模型;3)将各个SISO系统的状态空间模型组合成一个整体的MIMO系统的状态空间模型。
4. Matlab代码实现下面我们通过一个实例来演示如何用Matlab将MIMO系统的传递函数转化为状态空间模型。
假设传递函数矩阵为:\[ G(s) = \begin{bmatrix} \frac{2s+1}{s^2+3s+2}\frac{3s+2}{s^2+4s+3} \\ \frac{4s+1}{s^2+2s+1}\frac{5s+2}{s^2+3s+2} \end{bmatrix} \]我们需要将传递函数矩阵分解为四个SISO系统的传递函数:\[ G11(s) = \frac{2s+1}{s^2+3s+2} \]\[ G12(s) = \frac{3s+2}{s^2+4s+3} \]\[ G21(s) = \frac{4s+1}{s^2+2s+1} \]\[ G22(s) = \frac{5s+2}{s^2+3s+2} \]针对每个SISO系统,我们可以将其转化为状态空间模型,以G11(s)为例:```Matlab将传递函数G11(s)转化为状态空间模型num = [2, 1]; 分子系数den = [1, 3, 2]; 分母系数[A11, B11, C11, D11] = tf2ss(num, den); 转化为状态空间模型```将各个SISO系统的状态空间模型组合成整体的MIMO系统的状态空间模型:```Matlab对四个SISO系统的状态空间模型进行组合A = [A11, A12; A21, A22];B = [B11, B12; B21, B22];C = [C11, C12; C21, C22];D = [D11, D12; D21, D22];```至此,我们成功地将MIMO系统的传递函数转化为状态空间模型,并通过Matlab代码实现了这一过程。
传递函数到状态空间的实现.docx
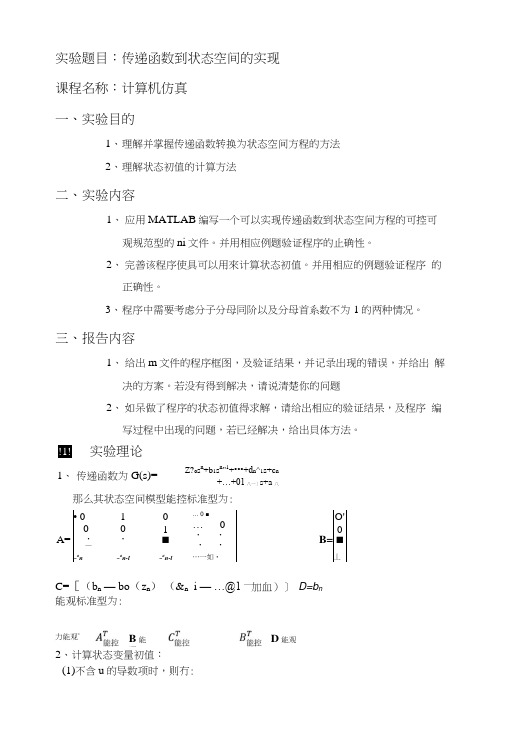
实验题目:传递函数到状态空间的实现 课程名称:计算机仿真 一、实验目的1、 理解并掌握传递函数转换为状态空间方程的方法2、 理解状态初值的计算方法二、 实验内容1、 应用MATLAB 编写一个可以实现传递函数到状态空间方程的可控可观规范型的ni 文件。
并用相应例题验证程序的止确性。
2、 完善该程序使具可以用來计算状态初值。
并用相应的例题验证程序 的正确性。
3、 程序中需要考虑分子分母同阶以及分母首系数不为1的两种情况。
三、 报告内容1、 给出m 文件的程序框图,及验证结果,并记录出现的错误,并给出 解决的方案。
若没有得到解决,请说清楚你的问题2、 如呆做了程序的状态初值得求解,请给岀相应的验证结杲,及程序 编写过程中出现的问题,若已经解决,给出貝体方法。
能观标准型为:2、计算状态变量初值:(1)不含u 的导数项时,则冇:A= • 0 0 •■1 0• •0 1■ ■… 0 ■…• • ••B=O' 0 ■ ■~a n~a n-l~a n-l…一如・丄Z?o s n +b 1s n "1+•••+d n ^1s+c n+…+01八一]s+a 八那么其状态空间模型能控标准型为:C=[(b n — bo (z n ) (&n _i — …@1 —加血)] D=b n!1!实验理论传递函数为G(s)=1、 力能观=B 能观D 能观和0)X?(O) 1(0)」 yj(o)(2)系统微分方程不仅包含u 的输入项,而口包含u 的导数项,则:五、程序检验(1)输入一个分母首系数为1月.分子分母不同阶传递函数:2S 3+ 4S 2+ 3S + 5 G = -------------------------------S 4 + 2S 3 + 5S 2 + 4S + 2程序运行结果: 能控标准型:A 二0 1 0 00 1 00 0 0 1-2-4-5-2B =兀 1(0)a n-l an-2 …兀2(0)a n-2%一3…七(0) ■ • = an-3•■ • • • • • • ■^-1(0)■ 1 … _ 兀“(0)..10 (x)n xa x 1 y (o )~Cn-l1 0 y (o )一 Cn-2 • •… •■ y(0) ■ •+ _ Cn-3■ ■ ■…0 严)(0)_C]…0 严(()) ■ ■_ 0nxl /ix(n -1)一 C] w(O)〃(()):M(O)•• • ••• :宀(0)0 ]“"-2)(0)(/?-l)xly(0) y(0)5 342D 二能观标准型:A =0 00-21 00-40 10-50 01-2B =5342C =0 001D 二初值部分:请输入系统输出的初值二[1 ;1;1;1]请输入系统输入的初值二[0; 0; 0] x0 二12831运行结果正确(2)输入一个分母首系数为2 口分子分母同阶传递函数:S 2 + 2S + 3G =2S 2 + 5S + 3程序运行结果: 能控标准型:0. 5000初值部分:请输入系统输出的初值二[1;1] 请输入系统输入的初值二[0]xO 二A =0 -1. 5000 B =0 1 C 二1. 5000 D =0. 5000能观标准型:A 二0 1.0000 B =1. 5000 1.5000 C 二1.5000 D =1.0000 -2. 50001. 5000-1. 5000 -2. 50001. 50003. 50001.0000运行结果正确六.流程图七、实验小结通过木次实验我了解了如何通过matlab的编程来实现传递函数转化为状态空间方程的能控和能观性,并掌握了程序的状态初值的求解。
状态空间表达式及其与传递函数间的关系

x Ax Bu y Cx Du
u(t)
y(t)
系统
A : 系统(状态)矩阵 (n n)
B : 控制(输入)矩阵 (n p)
C : 输出矩阵 (q n)
D : 前馈矩阵 (q p)
A、B、C、D 为常数阵 定常系统
A、B、C、D 含时变参数 时变系统
9
x Ax Bu y Cx Du
不同状态变量之间存在线性变换关系
13
2.6 两种模型的相互转化
2.6.1由状态空间模型转化为传递函数(阵) 2.6.2由传递函数转化为状态空间描述 应用MATLAB进行模型之间的相互转化(自
学)
14
2.6.1 由状态空间模型转化为传递函数(阵)
设 线 性 定 常 系 统 的 状 态空 间 模 型 为
0 1u
1 G( s ) LCs2 RCs 1
y 1
0
x1 x2
由同一系统的不同状态空间表
达式导出的传递函数(阵)必
然相同
18
2.6.2 由系统传递函数建立状态空间模型
之前已知:由微分方程转
A,B,C,D
化为状态空间模型
u(t)
y(t)
系统
U(s)
x Ax Bu 注意! u(t)
G(s)
y(t)
y Cx Du
系统
对其进行拉氏变换 sX(s) x(0 ) AX(s) BU(s) Y(s) CX(s) DU(s)
对应的传递函数(阵)为
令初始条件为零, x( 0 ) 0 得:sX(s) AX(s) BU(s)
x n
xn
传递函数阵

串联联结(3/5)
相应的输出方程为
y y2 C2 x2 D2 u2 C2 x2 D2 (C1 x1 D1u1 ) D2C1 x1 C2 x2 D2 D1u
若对此系统作线性状态变换 x Px ,则相应的状态空间 表达式为 ( A, B, C, D) ,相应的传递函数阵 ~ ~ ~ 1 ~ ~ G ( s) C ( sI A) B D 其中 A P 1 AP , B P 1B, C CP , D D
即有
x1 A1 0 x1 B1 x B D u x2 B2C1 A2 2 2 1 y D C C x1 D D u 2 1 2 x 2 1 2
串联联结(4/5)
因此,由上述状态空间模型可知,串联连接组合系统的状态 变量的维数为子系统的状态变量的维数之和。 由串联组合系统的状态空间模型可求得组合系统的传递函数 阵为
G ( s ) D2 C1 D2 C1 A1 C2 sI B2 C1 0 B1 B D D2 D1 A2 2 1 B 1 D2 D1 1 sI A2 B2 D1 0
x1 A1 x 0 2
C1
0 x1 B1 x B u A2 2 2
y C1 x1 D1u1 C2 x 2 D2 u2 x1 C2 ( D1 D2 )u x2
现代控制理论从状态空间表达式求传递函数矩阵
《现代控制理论》MOOC课程1.4从状态空间表达式求传递函数矩阵一. 传递函数矩阵的定义定义:对于多输入-多输出线性定常系统,输入向量为,输出向u =u 1u 2⋯u r T 量为, 且假定初始状态为零。
分别表示的拉氏y =y 1y 2⋯y m T ෝu i s ,ෝy i s u i ,y i ොy 1s =w 11s ොu 1s +w 12s ොu 2s +⋯+w 1r s ොu r sොy 2s =w 21s ොu 1s +w 22s ොu 2s +⋯+w 2r s ොu r s⋮ොy m s =w m1s ොu 1s +w m2s ොu 2s +⋯+w mr s ොu r sෝy (s)=ොy 1(s)⋮ොy m (s)=w 11s⋯w 1r s⋮⋯⋮w m1s⋯w mr s ොu 1(s)⋮ොu r (s)=W (s )ෝu (s )写成向量形式:称为系统的传递函数矩阵。
W (s )变换,表示第j 个输入端到第i 个输出端的传递函数,系统的输入输出关系可描述为:w ij (s )x=A x+Bu x0=0y=C x+Du结论:对应于状态空间描述W(s)=C(sI−A)−1B+D 其传递函数矩阵为:证明:lims→∞W s=D且有:W(s)并且,当D≠0时,为真有理分式矩阵,当D=0时,为严格真有理分式矩阵,W s对状态空间表达式取拉氏变换:s X(s)=AX(s)+BU(s)Y(s)=CX(s)+DU(s)由状态方程的拉氏变换表达式可得:X(s)=(sI−A)−1B U(s)Y(s)=(C(sI−A)−1B+D )U(s)代入输出方程的拉氏变换表达式可得:故传递函数矩阵为:W(s)=C(sI−A)−1B+D对于传递函数矩阵:W(s )=C (sI −A )−1B +D 考虑:(sI −A)−1=Τadj(sI −A )det (sI −A )且伴随矩阵每个元素多项式的最高次幂都小于的最高次幂,故adj (sI −A )det (sI −A )lim s→∞W s =D因此有:lim s→∞(sI −A )−1=0当D =0时,为严格真有理分式;W s 故当D ≠0时,为真有理分式;W s三. 传递函数矩阵的唯一性证明:一个系统的状态空间表达式是非唯一的,但其传递函数矩阵是唯一的。
传递函数到状态空间的实现

实验题目:传递函数到状态空间的实现课程名称:计算机仿真一、实验目的1、理解并掌握传递函数转换为状态空间方程的方法2、理解状态初值的计算方法二、实验内容1、应用MATLAB®写一个可以实现传递函数到状态空间方程的可控可观规范型的m文件。
并用相应例题验证程序的正确性。
2、完善该程序使其可以用来计算状态初值。
并用相应的例题验证程序的正确性。
3、程序中需要考虑分子分母同阶以及分母首系数不为1的两种情况<三、报告内容1、给出m文件的程序框图,及验证结果,并记录出现的错误,并给出解决的方案。
若没有得到解决,请说清楚你的问题2、如果做了程序的状态初值得求解,请给出相应的验证结果,及程序编写过程中出现的问题,若已经解决,给出具体方法。
四、实验理论1、传递函数为 --------------------那么其状态空间模型能控标准型为:A= B=C=能观标准型为:能观能控能观能控能观2、计算状态变量初值:D= 能控能观能控(1)不含u的导数项时,则有:y (o ) y (o )I = I]y (n 」(0)-五、程序检验程序运行结果: 能控标准型:A = 0 1 0 0 0 0 1 0 00 1-2 -4 -5 -2 B = 0、1(0)--a na n■…a1们 ■ y(0) ■ [ _ C n_ C n_2 —C 2 — Ci -u(0)-X 2(0)an/ an & (1)y(0)_皿 ......... —G 0u(0) X 3(0)a =a n(-aay(0)a+ _C n ( ....................................aaaU(0)■X n ±(0)a 1......... 0 y (n「0)a一 C jU2)(0) 川(0) _1 1 0 .................... 0 一yj (0)一I0 … 0屮2)(0)一 u 的输入项,而且包含u 的导数项,则: n 1n n n 1n (n-1)(n-1) 1x 1( 0)X 2(0)I : I I IX n ( 0)(2)系统微分方程不仅包含 (1)输入一个分母首系数为 1且分子分母不同阶传递函数:5 3 4 2D =能观标准型:A =0 0 0 -21 0 0 -40 1 0 -50 0 1 -2B =5342C =0 0 0 1D =初值部分:请输入系统输出的初值=[1;1;1;1]请输入系统输入的初值=[0;0;0]x0 =12831运行结果正确(2)输入一个分母首系数为2且分子分母同阶传递函数: 程序运行结果:能控标准型:A =0 1.0000-1.5000 -2.5000B =1C =1.5000 1.5000D =0.5000能观标准型:A =0 -1.50001.0000 -2.5000B =1.50001.5000C =1.5000 1.5000D =0.5000初值部分:请输入系统输出的初值=[1;1]请输入系统输入的初值=[0]x0 =3.50001.0000运行结果正确六、流程图七、实验小结通过本次实验我了解了如何通过matlab的编程来实现传递函数转化为状态空间方程的能控和能观性,并掌握了程序的状态初值的求解。
matlab根据传递函数矩阵求状态空间方程

MATLAB根据传递函数矩阵求状态空间方程在探讨MATLAB如何根据传递函数矩阵求状态空间方程之前,首先需要了解传递函数和状态空间方程的概念。
传递函数是描述线性时不变系统输入与输出之间关系的数学方法,通常用于描述信号处理、控制系统等领域中的系统行为。
而状态空间方程则是另一种描述系统动态行为的方法,它能够全面描述系统的状态随时间的变化。
在工程领域中,状态空间方程常常用于分析系统的稳定性、控制系统的设计等问题。
在MATLAB中,我们可以利用控制工具箱提供的函数来求解传递函数矩阵对应的状态空间方程。
我们需要用tf函数将传递函数表示为MATLAB中的传递函数对象,然后利用ss函数将传递函数对象转化为状态空间对象,从而得到对应的状态空间方程。
接下来,我们以一个具体的例子来演示MATLAB如何根据传递函数矩阵求状态空间方程。
假设有如下传递函数矩阵:\[ G(s) = \begin{bmatrix} \frac{2s+1}{s^2+3s+2} &\frac{3s+2}{s^2+s+1} \\ \frac{s+1}{s^2+2s+1} &\frac{4s+1}{s^2+4s+3} \end{bmatrix} \]我们希望利用MATLAB求解对应的状态空间方程。
我们可以利用tf函数将传递函数矩阵表示为MATLAB中的传递函数对象:```matlabnum = {[2 1; 3 2]; [1 1; 4 1]}; % 分子矩阵den = {[1 3 2; 1 1 1]; [1 2 1; 1 4 3]}; % 分母矩阵G = tf(num,den);```接下来,我们可以利用ss函数将传递函数对象转化为状态空间对象:```matlabsys = ss(G);```通过以上步骤,我们就可以得到对应的状态空间方程。
值得注意的是,状态空间方程通常表示为如下形式:\[ \dot{x} = Ax + Bu \]\[ y = Cx + Du \]其中,\[ A \]、\[ B \]、\[ C \]、\[ D \] 分别是状态方程的系数矩阵,\[ x \] 是系统的状态向量,\[ u \] 是系统的输入向量,\[ y \] 是系统的输出向量。
传递函数矩阵基本关系式
传递函数矩阵基本关系式
函数矩阵是一种用于描述线性变换的矩阵形式。
在传递函数矩
阵的基本关系式中,我们需要考虑以下几个方面:
1. 线性变换,函数矩阵描述了一个线性变换,它将一个向量空
间中的向量映射到另一个向量空间中的向量。
线性变换具有保持向
量加法和标量乘法的性质。
2. 基向量的映射,函数矩阵的列向量表示了基向量在变换后的
映射结果。
通过函数矩阵乘以一个列向量,可以得到变换后的向量。
3. 基向量的线性组合,任意一个向量可以表示为基向量的线性
组合。
函数矩阵的作用是将基向量的线性组合映射为另一个向量空
间中的线性组合。
4. 矩阵乘法,函数矩阵的乘法运算可以用来表示多个线性变换
的复合。
通过将多个函数矩阵相乘,可以得到复合变换的函数矩阵。
5. 基变换,函数矩阵可以用来描述基向量的变换。
通过将函数
矩阵乘以一个基向量,可以得到基向量在变换后的映射结果。
综上所述,传递函数矩阵的基本关系式包括线性变换、基向量的映射、基向量的线性组合、矩阵乘法和基变换等方面。
这些关系式可以用函数矩阵的定义和性质来推导和解释。
4第四章 传递函数矩阵的状态空间

0 0 1u 1 0
1 2 0 0 0 y x 0 0 0 1 1
系统阶次为n=5
所以多输入多输出系统的状态空间表达式不仅系数矩阵不 同,而且阶数也可 Nhomakorabea不一样。
5
关于实现的基本性质 1、实现的不唯一性,一个传递函数阵可以对应不同维数的实 现,即使是相同维数的实现,也不只有一种实现; 2、对于每一个传递函数阵一定存在一个维数最小的实现; 3、实现问题的物理本质是对于一个具有“黑箱”形式的真实系 统,在状态空间领域内寻找一个外部等价的假象结构 任务: 如何有规律的建立规范形式? 如何判断所建立的状态空间表达式的阶次为最小阶次?
2 , 0 p , 0 u1 2 ,n 1 p , n 1 u p
y( s ) 0 0 1x d u
由单输入单输出系统的能观测标准型推广而来,系统一 定能观测,但不一定能控。
15
例:求G2(s)的能观测型实现 解:首先化为严格真分式
11
1,n1 s n 1 1, 0 对G ˆ ( s )作串联分解,引入中间变量z ˆ ( s) 1 G D(s) q ,n1 s n 1 q , 0 1 z ( s ) u ( s) n 1 1,n1 s 1, 0 D( s) y( s ) z(s) d u(s) ( n 1) x z , x z x z n 1 1 2 n q ,n1 s q , 0
取出G(s)的第j列
g j ( s ) g1 j ( s ) g qj ( s )
T
1 T n1 j ( s ) nqj ( s ) d j (s)
绪论

线性系统理论Linear System Theory 北京理工大学自动化学院学时:54学分:3主讲教师:姚小兰联系电话:68912467Email : yaoxiaolan@ 讲义:《线性系统理论与设计》•第一章绪论1学时•第二章系统的数学描述5学时•第四章线性动态方程和脉冲响应矩阵8学时•第五章线性动态方程的可控性和可观测性8学时•第六章传递函数矩阵的状态空间实现6学时•第七章系统的运动稳定性8学时•第八章线性反馈系统的综合8学时•第九章状态观测器及状态观测器的设计4学时•课堂讨论6学时•根据实际情况,各章所用学时会稍微有所调整。
讲授方式:以课堂讲授为主,适当章节进行自学及讨论。
考核方式:期末闭卷考试80~90%平时10~20%参考书目[1] 陈啟宗[美],王纪文/杜正秋/毛剑琴[译].线性系统理论与设计,科学出版社,1988(英文第三版1999)[2] 郑大鈡. 线性系统理论(第2版),清华大学出版社,2002[3] 段广仁. 线性系统理论(第2版),哈尔滨工业大学出版社,2004[4] 黄琳.系统与控制理论中的线性代数, 科学出版社,1984[5] T.凯拉斯.线性系统,科学出版社,1985[6] (日)须田信英等曹长修译.自动控制中的矩阵理论,科学出版社, 1979何谓控制科学?控制科学是研究各种系统的共同控制规律的科学,是数学与工程学的交叉科学,是自动化系统的核心理论,也是人类改造世界的重要方法。
通俗地说,从现代汽车到航天飞机,都离不开控制理论。
随着计算机和其他高技术的急剧发展,人类需要处理越来越复杂的动态系统,而保持技术和经济竞争优势不断地刺激着追求控制系统的精确性、有效性和可靠性。
航空航天、工业过程、生物医学,社会经济和生态环境等领域出现了大量复杂系统控制问题,对控制科学提出了前所未有的挑战。
一、系统控制理论的研究对象1、系统:由相互关联和相互制约的若干“部分”组成的具有特定功能的一个“整体”。
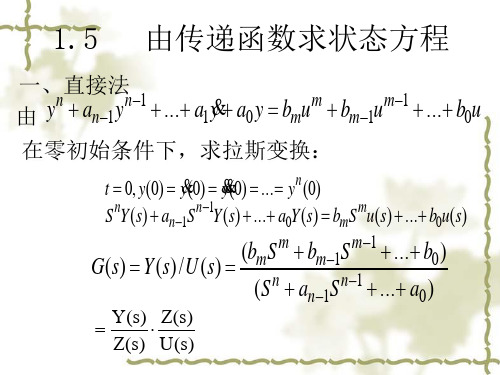
传递函数到状态空间方程
传递函数和状态空间方程引言传递函数和状态空间方程是控制系统工程中常用的数学模型和分析工具。
它们用于描述和分析动态系统的行为和性能,对于控制系统的设计和优化起着关键作用。
传递函数定义在控制系统中,传递函数是一个描述输入和输出之间关系的数学函数。
传递函数通常用G(s)表示,其中s是复数变量,表示系统的复频域特性。
传递函数描述了一个线性、时不变系统对输入信号的响应。
传递函数的一般形式如下:b0*s^n + b1*s^(n-1) + ... + bnG(s) = ---------------------------------------s^m + a1*s^(m-1) + ... + am其中n和m分别是传递函数的分子和分母的最高次幂。
用途传递函数可用于描述系统的频率响应和稳定性特性。
传递函数可以反映系统对不同频率的输入信号的放大或衰减情况,帮助工程师了解系统的动态特性。
传递函数还可以用于控制系统的设计和分析。
通过对传递函数进行数学运算和变换,可以获得系统的稳定性、动态响应以及频域特性等关键性能指标。
工作方式传递函数的输入是一个复数变量s,代表系统的频域特性。
通过将s带入传递函数的表达式中,可以得到系统的输出。
传递函数的输出代表了系统对输入信号的响应。
通过对传递函数表达式进行分析和计算,可以获得系统的稳定性、频率响应和动态响应等关键性能指标。
状态空间方程定义在控制系统中,状态空间方程是一种用状态变量表示系统状态的数学模型。
状态空间方程描述了系统的状态和状态变化随时间的规律。
状态空间方程的一般形式如下:dx/dt = Ax + Buy = Cx + Du其中,x是系统的状态向量,表示系统的状态变量;u是系统的输入向量,表示系统的输入信号;y是系统的输出向量,表示系统的输出信号;A、B、C和D是系统的系数矩阵。
用途状态空间方程可以用于描述和分析系统的动态行为和稳定性特性。
状态空间方程是一种直观、物理意义明确的模型,可以帮助工程师理解系统的内部状态和相互关系。
由传递函数转换成状态空间模型(1)
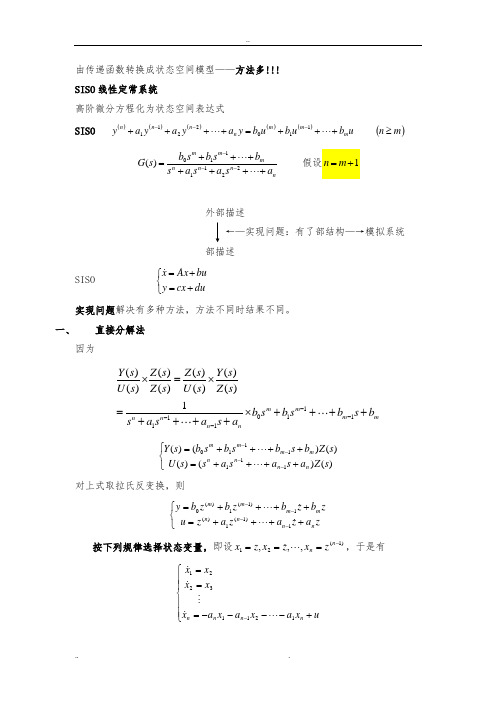
由传递函数转换成状态空间模型——方法多!!! SISO 线性定常系统高阶微分方程化为状态空间表达式SISO ()()()()()()m n u b u b u b y a y a y a y m m m n n n n ≥+++=++++--- 1102211)(2211110nn n n mm m a s a s a s b s b s b s G +++++++=--- 假设1+=m n外部描述←—实现问题:有了部结构—→模拟系统部描述SISO ⎩⎨⎧+=+=ducx y bu Ax x实现问题解决有多种方法,方法不同时结果不同。
一、直接分解法因为1011111()()()()()()()()1m m m mn n n nY s Z s Z s Y s U s Z s U s Z s b s b s b s b s a s a s a ----⨯=⨯=⨯++++++++⎩⎨⎧++++=++++=----)()()()()()(1111110s Z a s a s a s s U s Z b s b s b s b s Y n n n n m m m m 对上式取拉氏反变换,则⎩⎨⎧++++=++++=----z a z a za z u zb z b z b z b y n n n n m m m m 1)1(1)(1)1(1)(0 按下列规律选择状态变量,即设)1(21,,,-===n n z x zx z x ,于是有 ⎪⎪⎩⎪⎪⎨⎧+----===-u x a x a x a xx xx xn n n n 12113221写成矩阵形式式中,1-n I 为1-n 阶单位矩阵,把这种标准型中的A 系数阵称之为友阵。
只要系统状态方程的系数阵A 和输入阵b 具有上式的形式,c 阵的形式可以任意,则称之为能控标准型。
则输出方程121110x b x b x b x b y m m n n ++++=--写成矩阵形式⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=--n n m m x x x x b b b b y 121011][ 分析c b A ,,阵的构成与传递函数系数的关系。
传递函数转状态空间的各种方法
G (s) Y (s) / U (s)
Y(s) Z(s) Z(s) U(s)
(bm S bm 1S ( S an 1S
n
m
m 1
n 1
... b0 )
... a0 )
设n>m n=m+1
Z ( s) 1 n U ( s) ( S an 1S n 1 ... a0 ) S n Z ( s) an 1S n 1Z ( s) ... a0 Z ( s) U ( s)
u
输出方程
n
Байду номын сангаас
Y ( s) ci xi ( s)
i 1
n
y(t ) ci xi (t ) c1c2 cn
i 1
x1 x2 xn
特点:n个子系统互不相关,都是独立 的,即解耦系统
解耦系统图形
例1.6
Y(s) 6 6 3 2 u (s) s 6s 11s 6 (s 1)(s 2)(s 3)
b3 0 b2 1 b1 1 b0 3
x1 y 3 1 1 x 2 x 3
Y(s) 二、并联法 G(s) u (s)
M(s) (s 1 )(s 2 ) (s n )
i (i 1,2,n)
极点
n c c1 c2 cn i s 1 s 2 s n i 1 s i
可控标准型
其中 x1 z
同样
x2 z
x n z n 1
Y(s) b n 1Sn 1 b n 2Sn 2 ... b1S b 0 Z(s)
Y(s) bn1Sn1Z(s) bn2Sn2 Z(s) ... b1SZ (s) b0 Z(s)
simulink传递函数矩阵

在Simulink中,传递函数可以使用传递函数模块(Transfer Fcn)来表示。
这个模块的分子系数(Numerator coefficients)和分母系数(Denominator coefficients)都支持在线调整,即在仿真过程中可通过set_param函数来在线调整传递函数的分子分母系数。
因此,如果您希望通过调整系数来改变传递函数的矩阵,您可以在Simulink模型中实现。
另外,如果需要实现时变传递函数,可以通过S函数实现时变传递函数,其核心思路是将传递函数转变为状态空间(可选可控标准型和可观标准型),通过传递函数系数重构状态空间矩阵,再通过状态空间实现时变传递函数。
至于如何通过Simulink实现传递函数矩阵的具体操作,建议您查阅相关教程或咨询专业人士。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0Iq P0 P 1 I q 1 , Bkq p P k 2 k 1 I q P k 1
注:(1)形式上与SISO系统的能控规范形一样,数都变成了矩阵. (2)一定是能观的,但不一定是控的. (3)由此求最小实现时,要按能控性进行结构分解. (4)维数与能控性实现可能不同.
且{ (s), D(s)}右互质, {sI Ac , Bc }左互质
(3) sI Ac 0 sI Ac -C c
Bc I 0 与 有相同的smith形 I 0 D(s) Bc I 0 与 有相同的smith形 0 0 D(s)
定义状态变量
ˆ1 ( k1 1) ( k1 ) 1 ˆ (k2 ) 1 2 0 推出 u 0 , 取 x y0 ( k p 1) ˆ (k p ) p p ˆ p y 0 I n x 0 C c0 x 0
k1 ˆ ˆ (s) s 1 ( s ) 1 ˆ0 ( s ) ˆ0 ( s ) u u kp ˆ kp ˆ s p ( s ) s ( s ) p
s k1 1 k1 1 ˆ s 1 ( s ) s ˆ 1 ( s ) ˆ (s) 1 1 ˆ (s) 2 ˆ0 (s) y k p 1 ˆ k p 1 s ( s ) s ˆ p ( s ) p ˆ s p (s) 1
4.3 基于MFD的典型实现
G ( s ) q p 严格真 右MFD : G ( s ) N ( s ) D 1 ( s ) 左MFD : G ( s ) A1 ( s ) B ( s ) D ( s )列既约, 控制器形实现 A( s )行既约, 观测器形实现
一. 构造控制器形实现
1. 能控形实现
Ip 0 p p 0 Akpkp 0 0 I p 1 I p C [ P0 , P 1 ,, P k 1 ]q kp
Ip
0 0 , Bkp p 0 Ip I p k 1 I p
4 控制器形实现
( Ac , Bc , Cc )
0 c
的确定
1 hc
Ac A C
特征:
0 c 0 c
B D
1 hc
D lc
Bc B D
c
N
lc
由于Ac0 , Bc0的特殊形式,
1 1 Ac Ac0 Bc0 Dhc Dlc , Bc Bc0 Dhc 的形式必如书P539页所示.
为核心右MFD。
1 ˆ( s ) ˆ ˆ ( s ) N ( s ) y s N s D ( ) ( ) ( s )u ˆ ˆ ( s) D( s ) ( s ) u ˆ( s ) u [ Dhc S ( s ) Dlc ( s )] ˆ (s) ˆ( s ) y ˆ ( s ) N lc ( s ) ˆ0 ( s ) y 1 1 ˆ ˆ ˆ (s) S ( s ) ( s ) Dhc Dlc ( s ) ( s ) Dhc u ˆ0 ( s ) u
第四章 传递函数矩阵的 状态空间实现
4.1 4.2 4.3 4.4 实现的基本概念和属性 有理分式传递函数矩阵的典型实现 基于MFD的典型实现 不可简约MFD的最小实现
4.1 实现的基本概念和属性
一 实现的定义和属性 1 实现的定义
假设已知线性定常系统的传递函数阵G(s), 若找到状态空间模型{A,B,C,E}使得
1
4.2有理分式传递函数矩阵的典型实现
一 标量传递函数的典型实现
能控规范形实现 能观测规范形实现 并联形实现(约当形实现) 串联形实现
二 传递函数矩阵的典型实现
G(s)----严格真,有理分式形式表达,即
G ( s ) [ g ij ( s )], i 1, 2, q ; j 1, 2, p ; 令 d ( s )为 g ij ( s )的最小公分母 , 记为 d ( s ) s k k 1 s k 1 1 s 0 则 G ( s )可表为 1 1 G (s) P(s) [ Pk 1 s k 1 P1 s P0 ] d (s) d (s) 形式上类似于 SISO 系统的传递函数 , 只不过分 子的系数变成了矩阵 .
ˆ( s ) u ˆ0 ( s ) S ( s ) (核) ˆ( s ) ˆ y s s ( ) ( ) 0 1 1 ˆ ˆ ˆ ( s) u0 ( s ) Dhc Dlc ( s ) ( s ) Dhc u (外围) ˆ ( s ) N lc y ˆ 0 ( s) y
注:(1)形式上与SISO系统的能控规范形一样,数都变成了矩阵. (2)一定是能控的,但不一定是能观的. (3)由此求最小实现时,要按能观性进行结构分解.
2. 能观测形实现 0 q q 0 0 I q Iq Akqkq 0 Iq C [0,0, ,0, I q ]qkq
k p 1 s s 1
可导出构造
ˆ ( s) u
( Ac , Bc , Cc )
ˆ0 ( s ) u
的结构图
ˆ 0 (s) y
D
1 hc
( s ) S 1 ( s )
N lc
ˆ (s) y
1 Dhc Dlc
称
( s ) S 1 ( s )
i 1
{ Ac , Bc }为完全能控且具有指定形式
2 MFD的核
引入列次表达式:
D(s) Dhc S (s) Dlc (s) N (s) Nlc(s) sk1 p S (s) , ki n k p i 1 s
s k1 1 s 1 (s)
0 c
N
y (t )
lc
A co B c0 D hc1 D l c
5 控制器形实现的性质
(1)控制器形实现是完全能控的,但不保证完全能观。 (2)控制器形实现和MFD在系数矩阵间满足:
sI Ac Bc (s) 0 Bc 0 D(s) I C N(s) 0 0 0 I 0 I c
三 能控类实现和能观测类实现
1能控类实现 {A,B,C,E}为G(s)的一个能控类实现的 充要条件是:
G (s) C(sI A ) B E { A , B }能 控 且 有 指 定 形 式
1
2 能观类实现
{A,B,C,E}为G(s)的一个能观类实现的 充要条件是:
G (s) C(sI A ) B E { A , C }能 观 且 有 特 定 形 式
G(s) C(sI A) 1 B E
成立,则称此状态空间模型为已知的传递函数 矩阵的一个状态空间实现。
2 实现的属性 实现的维数 : 实现维数=dimA 实现的不唯一性 :
维数可不同,同维的参数也可不同
最小实现
对于传递函数阵G(s)的一个维数最低的实现, 称为G(s)的最小实现或不可约简实现。
0 1 ˆ (k11) 0 ˆ (k1) 1 0 1 1 (k1) 1 ( 1 ) ˆ 0 ˆ 1 0 (k2 ) 1 1 2 0 x ( ) ( 1 ) k k p ˆ ˆ p 1 (kp ) 0 p p p 0 1 0 ˆ (1) ˆ p p 0 1 0 0 Ac0x0 Bc0u0 x y0 In x0 Cc0x0 {Ac0, Bc0}必完全能控
3
o o o ( A , B , C 核实现 c c c ) 的构造
只要构造出 ( s ) S 1 ( s )的实现 , 后面就只是代数运算了 . ˆ (s) 1 ˆ ˆ S s s u s ( ) ( ) ( ) 0 ˆ 核: , (s) ˆ( s ) ˆ y s s ( ) ( ) ˆ ( s) 0 p s k1
(4)控制器形实现能控能观的一个充分条件为:
rankN(s)=p
(5) det(sI-A c )=(detD hc ) 1 det D ( s )
dim Ac deg det D ( s )
(6) 设 为 Ac 的特征值,特征向量p
p= ( )q , q 满 足 D( )q=0
不为零的**行的数值: 1 Ac的第i个*行等于 Dhc Dlc 的第i行 1 Bc的第i个*行等于 Dhc 的第i行
u (t )
D
1 hc
u 0 (t )
B c0
0 x
A c0
x
0
y0 (t )C0cN lcy (t )
化简后:
u (t )
D hc1 D lc
1 hc
B D
二 最小实现的相关定理
定理1 : 设严格真有理函数阵G(s)的实现为{A,B,C}, 则其为最小实现的充要条件是{A,B,C}既完全能 控又完全能观。 定理2: 对给定的传递函数矩阵G(s),其最小实现不 是唯一的,但所有最小实现都是代数等价的。
定理3(单变量系统) : 设分子分母互质的真有理函数g(s)的实现是 {A,b,c,d},当且仅当dimA=deg(g(s))时,实 现{A,b,c,d}是g(s)的最小实现。 定理4(多变量系统) : 设真有理函数矩阵G(s)的实现是{A,B,C,D}, 当且仅当dimA=G(s)不可简约MFD的次数时,实 现{A,B,C,D}是G(s)的最小实现。