《信号与系统》第2章
信号与系统课件:第二章 LTI系统
2.1 离散时间LTI系统: 卷积和
(1)用移位单位抽样信号表示离散时间信号 (2)卷积和在离散时间信号LTI系统中的表征 (3)卷积和的计算 (4) 离散时间信号LTI系统的性质
(1)用单位抽样信号表示离散时间信号
x[n] ... x[1] n 1 x[0] n x[1] n 1... x[n][0] x[n 1][1]
(1)初始条件为n<0时,y(n)=0,求其单位抽样响应;
(2)初始条件为n≥0时,y(n)=0,求其单位抽样响应。
解:(1)设x(n) (n),且 y(1) h(1) 0 ,必有
y(n) h(n) 0, n 0
依次迭代
y(0) h(0) (0) 1 y(1) 1 0 1
2
当系统的初始状态为零,单位抽样响应h(n)就 能完全代表系统,那么对于线性时不变系统,任意 输入下的系统输出就可以利用卷积和求得。
差分方程在给定输入和边界条件下,可用迭代 的方法求系统的响应,当输入为δ(n)时,输出 (响应)就是单位抽样响应h(n)。
例:常系数差分方程
y(n) x(n) 1 y(n 1) 2
x[n]u[n] x[k]u[n k] x[k]
k
k
(ii)交换律:
yn xnhn hn xn
例子: 线性时不变系统中的阶跃响应 sn
sn unhn hnun
阶跃输入
输 单位抽样信号 入 响应的累加
n
sn hk
k
(iii)分配律:
xnh1n h2 n xnh1n xnh2 n
y(1) h(1) (1) 1 y(0) 0 1 1
2
22
y(2) h(2) (2) 1 y(1) 0 1 1 (1)2
信号与系统第二章习题

rt et ht
sin tut ut 1ut ut 1
t
0
sin
d
τ
u
t
ut
2
1
t 1
sin
τ
d
τut
u
t
2
1 1 costut ut 2
X
20
第
例2-4 计算卷积 f1(t) f2(t),并画出波形。
页
f1 t
f2 t
2
1
1 e t1u t 1
则得
A1 A2 3 3A1 2A2 2
解得
A1 A2
4 7
代入(1)得
ht 4e2t 7e3t ut X
18
例2-3
第
页
已知线性时不变系统的一对激励和响应波形如下图所示,
求该系统对激励的 et sin tut ut 1零状态响应。
et
r t
1
1
O 12
t
对激励和响应分别微分一次,得
t0
因为特解为3,所以 强迫响应是3,自由响应是 4 et e2t
X
12
方法二
第
页
零状态响应rzs t是方程
d2 r dt
t
2
3
dr d
t
t
2r
t
2
t
6ut
且满足rzs 0 rzs0 0的解
(5)
由于上式等号右边有 t项 ,故rzst应含有冲激函数,
从而rzs t 将发生跳变,即 rzs 0 rzs 0
d2 rt 3 d rt 2rt 0
dt2
dt
信号与系统第二章第一讲

则相应于1的k阶重根,有k项:
( A1t k 1 A2t k 2 Ak 1t Ak )e1t ( Ai t k i )e1t
i 1
k
例2-3
信 号 与 系 统
求如下所示的微分方程的齐次解。
Hale Waihona Puke d3 d2 d r (t ) 7 2 r (t ) 16 r (t ) 12r (t ) e(t ) 3 dt dt dt
等式两端各对应幂次的系数应相等,于是有:
信 号 与 系 统
特解为: 联立解得:
3B1 1 4 B1 3B2 2 2 B 2 B 3 B 0 2 3 1
统
线性时不变系统
线性的常系数微分方程
按照元件的约束特性及 系统结构的约束特性
也即:
具体系统物理模型
常系数微分方程建立
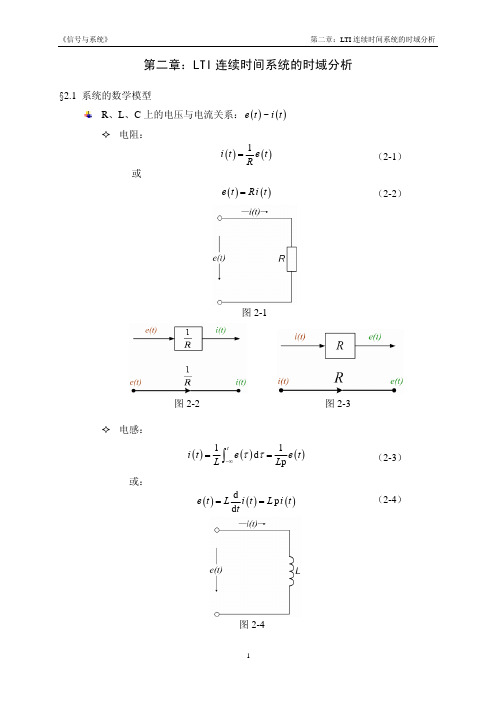
(1)元件端口的电压与电流约束关系
iR (t ) R
信 号 与 系 统
vR (t )
C
vR (t ) iR (t ) R
dvC (t ) iC (t ) C dt
vR (t ) Ri R (t )
与
时域经典法就是直接求解系统微分方程的方法。这种方 系 法的优点是直观,物理概念清楚,缺点是求解过程冗繁,应 用上也有局限性。所以在20世纪50年代以前,人们普遍喜欢 统 采用变换域分析方法(例如拉普拉斯变换法),而较少采用时 域经典法。20世纪50年代以后,由于δ(t)函数及计算机的普 遍应用,时域卷积法得到了迅速发展,且不断成熟和完善, 已成为系统分析的重要方法之一。时域分析法是各种变换域 分析法的基础。
信 号 与 系 统
is (t )
信号与系统第2章ppt课件
得到广泛的应用。调幅,调频都是
在该基础上进行的。
精选ppt
由此可见,将时间信号f(t)
乘以Cos(ω0t) 或Sin(ω0t)
,等效于将f(t)的频谱一分
为二,即幅度减小一半,沿
频率轴向左和向右各平移ω0.
第二章 傅立叶变换
例2 求如下矩形调幅信号的频谱函数
f(t) G (t)c o s 0 t
例7 如图a所示系统,已知乘法器的输入为
f (t) sin(2t) s(t)co3st)(
t
系统的频率响应为:
求输出y(t).
精选ppt
第二章 傅立叶变换
f (t) sin(2t) s(t)co3st)(
t
乘法器的输出信号为: x(t)f(t)s(t)
依频域卷积定理可知:X(j)21F(j)*S(j) 这里 f(t)F(j) s(t)S(j)
当 0 时 当 0 时
A () li m 0 A e () lim A e ( 0) lim 2 0 2 0
所以
A () li m 0A e()()
B()li m0Be()j
精选ppt
第二章 傅立叶变换
(6)符号函数 符号函数sgn(t)如图所示
由于sgn(t)不符合绝对可积条件, 故使用间接方法计算。
利用傅里叶反变换公式计算
第二章 傅立叶变换
例4 试求图示周期信号的频谱函数,图(b)中冲激函数的强度均为1.
(b)
[提示:(a)F()F[1]1F[cos(t)]
22
)
(b
Cn
1 T
T
2 T
fT(t)ejntdt
2
fT(t)(t)(tT2)
信号与系统王明泉版本~第二章习题解答
第2章 线性时不变连续系统的时域分析2.1 学习要求(1)会建立描述系统激励与响应关系的微分方程;(2)深刻理解系统的完全响应可分解为:零输入响应与零状态响应,自由响应与强迫响应,瞬态响应与稳态响应;(3)深刻理解系统的零输入线性与零状态线性,并根据关系求解相关的响应; (4)会根据系统微分方程和初始条件求解上述几种响应; (5)深刻理解单位冲激响应的意义,并会求解;(6)深刻理解系统起始状态与初始状态的区别,会根据系统微分方程和输入判断0时刻的跳变情况; (7)理解卷积运算在信号与系统中的物理意义和运算规律,会计算信号的卷积。
; 2.2 本章重点(1)系统(电子、机械)数学模型(微分方程)的建立; (2)用时域经典法求系统的响应; (3)系统的单位冲激响应及其求解;(4)卷积的定义、性质及运算,特别是()t δ函数形式与其它信号的卷积; (5)利用零输入线性与零状态线性,求解系统的响应。
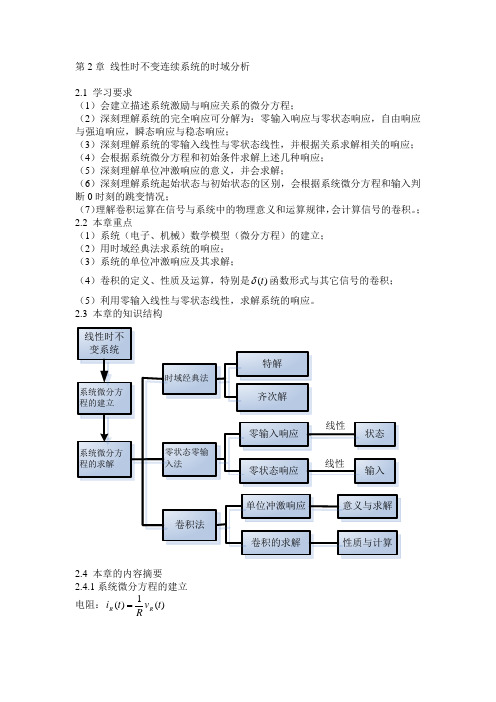
2.3 本章的知识结构2.4 本章的内容摘要2.4.1系统微分方程的建立电阻:)(1)(t v Rt i R R =电感:dtt di L t v L L )()(= )(d )(1)(0t i v Lt i L tL L +=⎰∞-ττ 电容:dtt dv C t i C C )()(= ⎰+=tt L C C t i i Ct v 0)(d )(1)(0ττ 2.4.2 系统微分方程的求解 齐次解和特解。
齐次解为满足齐次方程t n t t h e c e c e c t y 32121)(λλλ+⋅⋅⋅++=当特征根有重根时,如1λ有k 重根,则响应于1λ的重根部分将有k 项,形如t k t k t k t k h e c te c e t c e t c t y 111112211)(λλλλ++⋅⋅⋅++=--- 当特征根有一对单复根,即bi a +=2,1λ,则微分方程的齐次解bt e c bt e c t y at at h sin cos )(21+= 当特征根有一对m 重复根,即共有m 重ib a ±=2,1λ的复根,则微分方程的齐次解bt e t c bt te c bt c t y at m m at h cos cos cos )(121-+⋅⋅⋅++= bt e t d bt te d bt e d at m m at at sin sin sin 121-+⋅⋅⋅+++ 特解的函数形式与激励函数的形式有关。
信号与系统教案第2章
2.1 LTI连续系统的响应
一、微分方程的经典解
许多实际的系统可以用线性系统来模拟。一个线性系 统其激励与响应之间的关系可以用下列形式的微分方 程来描述:
y(n)(t) + an-1y (n-1)(t) + …+ a1y(1)(t) + a0y (t) = bmf(m)(t) + bm-1f (m-1)(t) + …+ b1f(1)(t) + b0f (t)
第2-7页
2.1 LTI连续系统的响应
齐次解的函数形式仅与系统本身的特性有关,而与激励 f(t)的函数形式无关,称为系统的固有响应或自由响应; 特解的函数形式由激励确定,称为强迫响应。 例1: 描述某系统的微分方程为
y”(t) + 5y’(t) + 6y(t) = f(t) 求(1)当f(t) = 2e-t,t≥0;y(0)=2,y’(0)= -1时的全解;
et[C cos( t) D sin( t)], 或 A cos( t )
其中Ae j C jD
第2-6页
2.1 LTI连续系统的响应
表2- 不同激励所对应的特解
激励 f (t)
tm
e t
cos( t) 或 sin( t)
特解 yp (t) Pmt m Pm-1t m1 P1t P0 所有的特征根均不等于0;
第2-13页
2.1 LTI连续系统的响应
通常,对于具体的系统,初始状态一般容易求得。这样 为求解微分方程,就需要从已知的初始状态y(j)(0-)设法 求得y(j)(0+)。下列举例说明。
例2:描述某系统的微分方程为 y”(t) + 3y’(t) + 2y(t) = 2f’(t) + 6f(t)
考研专业课郑君里版《信号与系统》第二章补充习题——附带答案详解
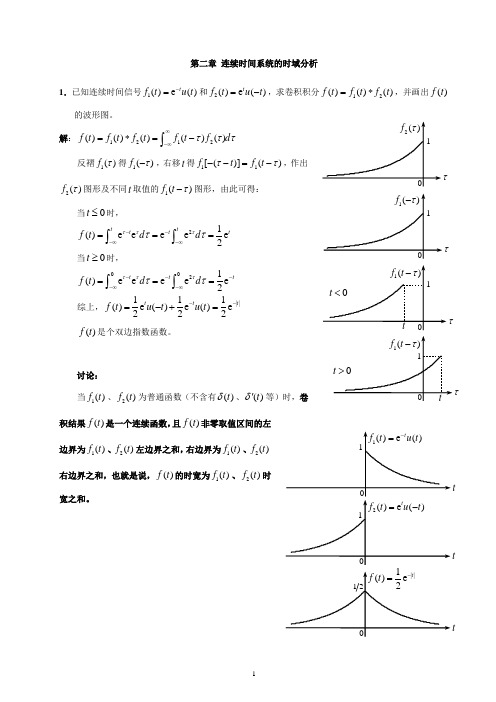
第二章 连续时间系统的时域分析1.已知连续时间信号1()e ()t f t u t -=和2()e ()t f t u t =-,求卷积积分12()()()f t f t f t =*,并画出()f t 的波形图。
解:1212()()()()()f t f t f t f t f d τττ∞-∞=*=-⎰反褶1()f τ得1()f τ-,右移t 得11[()]()f t f t ττ--=-,作出2()f τ图形及不同t 取值的1()f t τ-图形,由此可得:当0t ≤时,21()e e ee e 2ttt tt f t d d τττττ---∞-∞===⎰⎰当0t ≥时,0021()e e e e e 2t t t f t d d τττττ----∞-∞===⎰⎰综上,||111()e ()e ()e 222t t t f t u t u t --=-+=()f t 是个双边指数函数。
讨论:当1()f t 、2()f t 为普通函数(不含有()t δ、()t δ'等)时,卷积结果()f t 是一个连续函数,且()f t 非零取值区间的左边界为1()f t 、2()f t 左边界之和,右边界为1()f t 、2()f t 右边界之和,也就是说,()f t 的时宽为1()f t 、2()f t 时宽之和。
τttt2.计算题图2(a )所示函数)(1t f 和)(2t f 的卷积积分)()()(21t f t f t f *=,并画出)(t f 的图形。
解法一:图解法1212()()()()()f t f t f t f t f d τττ∞-∞=*=-⎰其中1()f t τ-的波形见题图2(b),由此可得: 当10t +≤,即1t ≤-时,()0f t = 当011t ≤+≤,即10t -≤≤时,120()2(1)t f t d t ττ+==+⎰当11t +≥但10t -≤,即01t ≤≤时,1()21f t d ττ==⎰当011t ≤-≤,即12t ≤≤时,121()21(1)t f t d t ττ-==--⎰当11t -≥,即2t ≥时,()0f t =综上,220,1,2(1),10()1,011(1),12t t t t f t t t t ≤-≥⎧⎪+-≤≤⎪=⎨≤≤⎪⎪--≤≤⎩ ()f t 波形见题图2(c)。
信号与系统-第2章
f (t)
K
两式相加:
cosωt =
1 2
(e
jωt
+
e
jωt )
(2-4)
0 K
t
两式相减:
sinωt =
1 2j
(e
jωt
-e
jωt )
(2-5)
(3) 复指数信号: f(t) = Ke st = Ke (σ+ jω)t
= Keσt (cosωt + j sinωt)
当 σ > 0 时为增幅振荡 ω = 0 时为实指数信号 σ < 0 时为衰减振荡
2
01
t
f(
1 2
t)
=
1 2
t
0
0<t <4 其它
f(12 t)
2 0
4t
注意: 平移、反折和展缩都是用新的时间变量去代换原来的
时间变量, 而信号幅度不变.
t +2 -2<t<0 例2-5:已知 f(t) = -2t + 2 0<t<1
f (t)
2
0
其它
-2 0 1
t
求 f(2t-1),
f(
1 2
(1) 相加和相乘
信号相加: f t f1t f2 t fn t 信号相乘: f t f1t f2 t fn t
0 t<0 例2-1:已知 f1(t) = sint t ≥ 0 , f2(t) =-sint, 求和积.
解: f1(t) + f2(t) =
-sint 0
t<0 t≥0
0
t<0
f1(t) f2(t) = -sin2t t ≥ 0 也可通过波形相加和相乘.
∞ t=0 作用: 方便信号运算.
信号与系统 第二章 第3讲
电容电压的跳变 电感电流的跳变 冲激函数匹配法确定初始条件
信号与系统 第2章
一.起始条件与初始条件
一般将激励信号加入的时刻定义为t=0 ,响应r(t)为 t 0 时方程的解,对于n阶系统,起始状态( 0- 状态)指:
d r ( 0 - ) d 2 r (0 - ) d n1 r (0 - ) r (0 ) , , , , 2 dt dt d t n1
0
0
vL ( ) d 0 , 此时iL (0 ) iL (0 )
冲激电压或阶跃电流作 用于电感时:
如果vL (t )为 t
1 0 1 v L ( ) d , L 0 L 此时 i L 0 i L 0
信号与系统 第2章
iL (0 ) iL (0 )
信号与系统 第2章
例2-2-2
d i L (t ) v L (t ) L dt
i L (t )
I s u(t )
L
d[ I s v(t )] L LI s (t ) dt
1 0 i L (0 ) i L (0 ) LI s (t ) d t L 0
v L (t )
i L (0 ) I s
当系统用微分方程表示时,系统从 0 到0 状态有没 有跳变取决于微分方程右端自由项是否包含 (t ) 及其各 阶导数项。
信号与系统 第2章
1. 电容电压的跳变
t c i c (t ) 由伏安关系 vC (t ) 1 iC ( ) d C v (t ) 1 0 1 0 1 t c iC ( ) d iC ( ) d iC ( ) d C C 0 C 0 1 0 1 t vC (0 ) iC ( ) d iC ( ) d C 0 C 0
信号与系统课件(郑君里版)第二章
e ,t≥0;y(0)=2,y’(0)= 2 t ,t≥0;y(0)= 1, e
t
-1
y’(0)=0时的全解。
解: (1) 特征方程为
2 + 5λ+ 6 = 0
其特征根λ1= – 2,λ2= – 3。 齐次解为
yh (t ) C1e2t C2e2t
由表2-2可知,当f(t) = 2 e t
y fh (t ) C f 1e
2t
C f 2e
t
其特解为常数 3 , 于是有
y f (t ) C f 1e2t C f 2et 3
C1 1 C 2 4
根据初始值求得:
y f (t ) e2t 4et 3,t 0
四.系统响应划分
自由响应+强迫响应 (Natural+forced) 暂态响应+稳态响应 (Transient+Steady-state) 零输入响应+零状态响应 (Zero-input+Zero-state)
零输入响应
2.2 冲激响应和阶跃响应
一.冲激响应 1.定义 系统在单位冲激信号δ(t) 作用下产生的零状态响 应,称为单位冲激响应,简称冲激响应,一般用h(t)表 示。
t
ht
H
[例2.2.1] 描述某系统的微分方程为y”(t)+5y’(t)+6y(t)=f(t)求其 冲激响应h(t)。
相互关系
零输入响应是自由响应的一部分,零状态响应有自由响 应的一部分和强迫响应构成 。
y (t ) e 2t 3 y x (t ) y f (t ) (2e 2t 4e t ) (e 2t 4e t 3),t 0
信号与系统第二章_连续时间系统时域分析(青岛大学)
n
rzi (t) Azikekt k 1
(b)
r(k zi
)
(0
)
r(k) (0 )
k 0,1,L ,(n 1)
系数Azik可直接由 r(k) (0 ) 来确定。
例:已知描述某二阶LTI连续时间系统的动态方程
d2 dt 2
r(t)
5
d dt
r(t)
6r(t)
e(t)
起始状态 r(0 ) 1,r(0 ) ,2激励信号
(t)
2
p3
5
2p p2
5
p
3
e(t)
2
d3 dt3
vo
(t)
5
d2 dt 2
vo
(t)
5
d dt
vo
(t)
3vo
(t)
2
d dt
e(t)
总结: (1)引入算子符号后,RLC 电路可借助纯电阻电路的分析方法;
(2)是否可消去公共因子的原则:微分方程的阶数应等于电路 阶数(独立储能元件的个数)。
§2.3 微分方程的经典解法 r(t) rh (t) rp (t)
r(0 ) r(0 ) 1
(4)由 0状态确定待定系数
r(t) A1et A2e2t 0.5e3t
rr((00))
A1 A1
A2 0.5 1 2A2 1.5
3
A1 A2
5.5 5
全响应 r(t) 5.5et 5e2t 0.5e3t ,t 0
(一)经典法求解微分方程步骤:
r(t) 0 u(t) r(0 ) r(0 )
代入
d2 dt 2
r(t)
3
d dt
r(t)
《信号与系统》第二版_(郑君里)_高等教育出版社课件

10
2021/4/2
零输入响应与零状态响应(cont.)
例2 7 设有如图所示的RC电路,电容两端有起始电压u( C 0),激 励源为e(t),求t 0时系统响应 电容两端电压u( C t)。 解:列写系统的微分方程为
d dt
uc (t)
1 RC
uc (t)
1 RC
e(t )
根
据微分方
程
的
一般表达式可
t
e RCuc (t) uc (0 )
1 RC
t
e RCe( )d
0-
R
+
+ e(t) uc (0 ) C
-
整
理
得:uc
(t
)=e
t RC
uc
(0
)
1 RC
t
e
t RC
e(
)d
0-
零输入响应
零状态响应
+
uc (t)
-
smilegs2001@
11
2021/4/2
零输入响应与零状态响应(cont.)
uR (t) RiL (t) 联立上式得
+
is (t)
-
R
iC (t) +
C
uc (t)
-
iL (t)
+
L uL (t)
-
带入(5)式得iL
(t )
iS
(t )
C
duC (t) dt
代入(3)式得
L
diL (t) dt
uC (t)
RiL (t)........................(1)
KVL:
uL
《信号与系统》第二版第二章:LTI连续时间系统的时域分析
零状态(zero state)响应 yzs (t ) :不考虑起始时刻系统储能的作用,即Y(0-) ≡0,由系统的外加激励信号 v (t ) = v (t )u (t ) ≠ 0 所产生的响应。
零输入响应 yzi (t ) :
5
《信号与系统》
第二章:LTI 连续时间系统的时域分析
∏(p −αi )
i =1
(αi 为互异特征根)
= N (p) ⎡⎣eαnt ∗ ∗ eα1t ∗ v (t )⎤⎦
(2-19)
n
∑ yzs (t ) = 齐次解 Aieαit +特解 B (t ) i =1
(2-20)
特解 B (t ) 反映系统输入对输出的强迫。
非零状态线性系统: 定义(非零状态线性系统):系统 T 的初始状态为X(0-)≠0
令: D (p) pn + an−1pn−1 + ... + a1p + a0
N (p) bmpm + ... + b1p + b0
4
《信号与系统》
有:
第二章:LTI 连续时间系统的时域分析
y
(t)
=
N (p) D(p)
v(t
)
H (p)v(t)
(2-13)
其中,
H
(p)
=
N (p) D(p)
称为系统算子。
≤ ∫ ∫ f (τ ) g (t −τ ) dτ dt ΩΩ
= ∫ f (τ ) ∫ g (t −τ ) dtdτ
Ω
Ω
=∫
f (τ )
g (t ) dτ = 1
f (t) 1
g (t ) 1
信号与系统第二章
§2.1 经典时域解法
2 连续时间信号与系统的时域分析
2.1.1 微分方程式的建立与求解
1.物理系统的模型
•许多实际系统可以用线性系统来模拟。
•若系统的参数不随时间而改变,则该系统可以用
线性常系数微分方程来描述。
2 连续时间信号与系统的时域分析
•根据实际系统的物理特性列写系统的微分方程。 •对于电路系统,主要是根据元件特性约束和网络
2 连续时间信号与系统的时域分析
2 冲激函数匹配法 配平的原理:t =0 时刻微分方程左右两端的δ(t) 及各阶导数应该平衡.
【例】
d y t 3 y t 3 t 已知y0 , 求y0 dt
ut : 表示0 到0 相对单位跳变函数
该过程可借助数学描述
所以系统响应的完全解为
需要注意的: 特解的函数形式由系统所加的激励决定,齐次解 的函数形式完全取决于特征方程的根。 由于构成系统的各元件本身所遵从的规律、系统 的结构与参数决定了微分方程的阶次与系数,因此, 齐次解只与系统本身特性有关。
2 连续时间信号与系统的时域分析
2.1.2 从 到 状态的转换
2 连续时间信号与系统的时域分析
齐次解:由特征方程→求出特征根→写出齐次解形式 注意重根情况处理方法。 特 解:根据微分方程右端函数式形式,设含待定系 数的特解函数式→代入原方程,比较系数 定出特解。
完全解:齐次解和特解相加, 齐次解中的待定系数可通过初始条件求得.
在系统分析中,响应区间定义为激励信号 加 入后系统的状态变化区间。系统响应的求解区间为
a 3 即 b 9 c 9
即 y0 y0 9
2 连续时间信号与系统的时域分析
冲激函数匹配法实现过程中应注意的问题: (1) 对于冲激函数只匹配 及其各阶导数项, 微分方程两端这些函数项都对应相等。 (2) 匹配从方程左端 的最高阶项开始,首 先使方程右端冲激函数最高阶次项得到匹配,在已 匹配好的高阶次冲激函数项系数的条件下,再匹配 低阶项。 (3) 每次匹配方程低阶冲激函数项时,如果方 程左端所有同阶次冲激函数各项系数之和不能和右 端匹配,则由左端 高阶项中补偿。
信号与系统(教案) 第二章

二、图解机理
用图形方式理解卷积运算过程,包括以下6个步骤: Step1:换元。画出f1(t)与f2(t)波形,将波形图中的t轴 改换成τ轴,分别得到f1(τ)和f2(τ)。 Step2:翻转。将f2(τ)波形以纵轴为中心轴翻 180°,得 到f2(-τ)波形。 4
信号与系统
2.2
卷积积分
Step3:平移。给定t值,将f2(-τ)波形沿τ轴平移|t|。
卷积积分是一种数学运算,它有许多重要的性质 (或运算规则),灵活地运用它们能简化卷积运算。 下面讨论均设卷积积分是收敛的(或存在的)。
性质1.卷积代数 满足乘法的三律: 1. 交换律: f1(t)* f2(t) =f2(t)* f1(t) 2. 分配律: f1(t)*[ f2(t)+ f3(t)] =f1(t)* f2(t)+ f1(t)* f3(t) 3. 结合律: [f1(t)* f2(t)]* f3(t)] =f1(t)*[ f2(t) * f3(t)]
1.奇异信号
单位冲激信号 (t), 单位阶跃信号 (t).
2.正弦信号
也称为虚指数信号。 f (t ) A cos( t ) A [e j (t ) e j (t ) ] 2
式 中A、和分 别 为 正 弦 信 号 的 振 幅 角 频 率 和 初 相 。 、 f ( t )是 周 期 信 号 , 其 周 期 2 T=
1 0
f 1(t)
2
t
14
信号与系统 例:f1(t), f2(t)如图,求f1(t)* f2(t) 解: f1(t) = 2ε (t) –2ε (t –1) f2(t) = ε (t+1) –ε (t –1)
2.2 卷积积分 2.2 卷积积分
《信号与系统》第二章习题解答

14
Chapter 2
Problems Solution
2.47 An LTI system with impulse response h0 (t ) y0 (t ) x0 (t ) → y0 (t ) 1 In each of these cases,determine 0 2 whether or not we have enough Information to determine the output y (t )
∞ ∞ y ( t ) = ∑ δ ( t − kT ) ∗ h ( t ) = ∑ h ( t − kT ) k =−∞ k =−∞
11
Chapter 2
Problems Solution
y (t )
L
1
-4 -3 -1 0 1 3
-5
5
L
t t
L L
(a) T=4 1 y (t )
Problems Solution
2.20. Evaluate the following integrals:
(a ) ∫−∞
பைடு நூலகம்
+∞
u0 (t ) cos(t )dt = cos t
t =0
=1
(b ) ∫0
5
sin (2πt )δ (t + 3)dt = 0
(c) ∫−5 u1 (1 − τ ) cos(2πτ )dτ
(c) S is time-varying.
y [ n ] = u [ n − 2] − u [ n − 6] y [ n] = u [ n − 4] − u [ n − 8]
( d ) x [ n] = u [ n]
信号与系统第二章(3)卷积积分
y(t) 1 f1(τ ) f2( t - ) τ y(3)
0 (e) t >3
3
t
τ
0 (f )
3
t
例2 求下图所示函数 f1(t )和 f2 (t )的卷积积 分.
2
f1 (t ) f 2 (t )
3 4
2
0 2
2
f1 (τ )
t
0
2
f 2 ( τ )
3 4
t
解(1) )
2
0
2
τ -2
0
τ
(2) )
由前面分析知: 由前面分析知:
y zs (t ) = ∫ f (τ )h(t τ )dτ
0
tHale Waihona Puke = f (t ) h(t )
这是求解零状态响 应的另一种方法. 应的另一种方法
二,卷积的图示法
第一步, 波形,将波形图中的t轴 第一步,画出 f 1 ( t ) 与 f 2 ( t ) 波形,将波形图中的 轴 ) 改换成τ轴 的波形. 改换成 轴,分别得到 f1 ( τ) f 2 ( τ的波形. 和 第二步, 波形以纵轴为中心轴翻转180° 第二步,将 f 2 (τ)波形以纵轴为中心轴翻转180°, 波形. 得到 f 2 ( τ)波形. 第三步,给定一个t值 波形沿τ轴平移 轴平移|t|. 第三步,给定一个 值,将 f 2 ( τ) 波形沿 轴平移 . 在t<0时, 波形往左移;在t>0时,波形 时 波形往左移; 时 往右移. 的波形. 往右移.这样就得到了 f 2 ( t τ) 的波形.
2
2
-1
0
t
f2 (t )
1
-1
0
1
信号与系统第二章(陈后金)2PPT课件
x [k]
3
22
1
k
2 1 0 1 2 3
x [ k ] 3 [ k 1 ] [ k ] 2 [ k 1 ] 2 [ k 2 ]
2021/4/8
28
二、基本离散时间序列
5.单位阶跃序列
定义:
u[k] 1
2 1 0 1 2
✓ [k]与u[k]的关系:
[k]u[k]u[k1]
2021/4/8
1 k 0 u[k]0 k 0
k
k
u[k] [n] n 29
二、基本离散时间序列
6.矩形序列
1 0kN1
RN[k]0 otherwise
N 1
R N[k]u[k]u[kN ][km ] m 0 RN[k] 1
k
21 0 1 2
N1
2021/4/8
30
二、基本离散时间序列
7.斜坡序列
即0N = m2p , m = 正整数时,信号是周期信号。
如果0 /2p m/N , N、m是不可约的整数, 则信号的周期为N。
2021/4/8
23
[例]判断下列离散序列是否为周期信号.
1) x1[k] = cos(kp/6)
0 /2p 1/12, 由于1/12是不可约的有理数,
故离散序列的周期N=12。
-1 0 1 2 3
k
➢ 序列的列表表示
表示k=0的位置
x[k]=[0, 2, 0, 1, 3, 1, 0]
2021/4/8
18
二、基本离散时间序列
1.实指数序列
r >1
x[k]Akr, kZ
0< r <1
r <1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5 P 10 P 2
特解: y p ( t ) 2 全解: y ( t ) Ae t cos( 2 t ) 2 确定 A 和 θ : y ( 0 ) A cos 2 3
y ( t ) Ae
t
t
t
y p ( t ) P1 e
( P1 t P1 P0 ) e
t
( P1 t 2 P1 P0 ) e
t
t
( P1 t 2 P1 P0 ) e
3 ( P1 t P1 P0 ) e
2 ( P1 t P0 ) e
t
t
bm f
( t ) b m 1 f
( t ) b1 f
b0 f (t )
或缩写为
i0
n
ai y
(i)
j0
m
bj f
( j)
ai 和 bj 均为常数, an = 1。
3
微分方程的全解的组成
•由齐次解和特解组成; •由自由响应和强迫响应组成; •由稳态响应和瞬态响应组成;
( Pr t Pr 1 t
r r 1
P1 t P0 ) e
t
9
微分方程经典解小结
• 关于齐次解:
– 解的一般形式为指数函数; – 若有多重特征根,则解为多项式与指数函数相乘; – 复根与实根的本质是相同的。
• 关于特解:
– 激励的形式主要有两种:指数函数与多项式; – 相应的响应也有两种形式:指数函数与多项式; – 当与特征根相重时,乘一多项式。
( n 1 )
( t ) a1 y
(1 )
a 0 y (t ) 0
由此求得的解为微分方程的齐次解。
•特征方程
a n 1
n n 1
a1 a 0 0
•特征根
n 个根 i ( i
1, 2 , , n )
6
单根与重根
• n 个单根
y h (t ) C 1e
18
例3的另一种求解方法(续)
齐次解: h ( t ) ( 0 . 5 j 0 . 5 ) e y
e
t ( 1 j 2 ) t
( 0 .5 j 0 .5 ) e 0 .5e
j 45 j 45 j2t
( 1 j 2 ) t
0 .5e
求系统的齐次解、特解和全解。 解: 特征方程: 2 2 5 0 特征根: 1 1 j 2 , 2 1 t y h ( t ) Ae cos( 2 t ) 齐次解: 特解: y p ( t ) P
j2
15
例3:微分方程经典解(续)
求系统的齐次解、特解和全解。 解: 特征方程: 2 5 6 0 特征根: 1 2 , 2 3 2 t 3t y h (t ) C 1e C 2e 齐次解: 特解: y p ( t ) P cos( t )
e
t
t
( P1 3 P1 2 P1 ) te P1 1
t
( 2 P1 3 P1 P0 3 P0 2 P0 ) e
t
e
特解:
y p ( t ) ( t P0 ) e
21
例4:微分方程经典解(再续)
全解:y ( t )
C 1e
t
C 2e
1 2 2
1
y ( 0 ) ( 1 j 2 ) C 1 ( 1 j 2 ) C 2 3 ( 1 j 2 ) C 1 ( 1 j 2 )( 1 C 1 ) 3 j 4C1 2 j 2 C 1 0 .5 j 0 .5 , C 2 0 .5 j 0 .5
11
例1:微分方程经典解(续)
确定 P:将 yp(t) = Pe –3t 代入微分方程
9 Pe
3t
9 Pe
3t
2 Pe
3t
2e
3t
P 1
特解: y p ( t ) e 3 t 全解: y ( t ) C 1 e t C 2 e 2 t e 3 t 确定C1和C2: y ( 0 ) C 1 C 2 1 1
cos( 2 t ) 2 Ae
t
sin( 2 t )
y ( 0 ) A cos 2 A sin 3 A cos 1 A cos 2 A sin 3
16
例3:微分方程经典解(再续)
求解 A 和 θ : A cos
y ( 0 ) 1, y ( 0 ) 1
求系统的齐次解、特解和全解。 解: 特征方程: 2 3 2 0 特征根: 1 1, 2 2 t 2 t y h ( t ) C 1e C 2 e 齐次解: 3t y p ( t ) Pe 特解:
t
求系统的齐次解、特解和全解。
解: 特征方程: 4 4 0
2
特征根: 齐次解: 特解:
1 2 ,
2 2
2 t
y h ( t ) C 1 t C 2 e
y p ( t ) Pe
t
13
例2:微分方程经典解(续)
确定 P:将 yp(t) = Pe –t 代入微分方程
信号与系统
第二章 连续系统的时域分析
2.1 LTI 连续系统的响应
单输入-单输出 LTI 系统的激励与响应的关系可用 n 阶常系数线性微分方程描述。
y
(n)
( t ) a n 1 y
(m )
( n 1 )
( t ) a1 y
( m 1 )
(1 )
a 0 y (t )
(1 )
1t
C 2e
2t
C ne
nt
i 1
n
C ie
it
• r 重根
y h ( t ) C 1t
r 1
C 2t
r2
C r 1t C r e
t
k 1
rபைடு நூலகம்
C kt
rk
e
t
• 一个 r 重根,n – r 个单根
y h (t )
k 1
t t
j 45 j 45
e e
j2t
e
e
j2t
0 .5e 0 .5e 2e
t
e
j2t
e
2 cos(
2 t 45 )
cos( 2 t 45 )
cos( 2 t 45 ) 2 ] ( t )
全解: y ( t ) [
2e
t
结论:共轭复根与实根的解本质上是相同的。
[ A1 t
r 1
cos( t 1 ) A 2 t
r2
cos( t 2 )
t
A r 1 t cos( t r 1 ) A r cos( t r )] e
8
微分方程的特解
• 激励为指数函数 eαt 时,特解为
Pe
t
若有 r 重等于 α 的特征根,则特解为
t
2 t
( t P0 ) e
2t
t t
( C 1 P0 ) e Ce
t
C 2e te
te
C 2e
2t
t
确定C1和C2: y ( 0 )
C C2 2 C2 1
t
y ( 0 ) C 2 C 2 1 2 C 1,
20
例4:微分方程经典解(续)
确定P1和P0:将 yp(t) = (P1t + P0)e – t 代入微分方程
y p ( t ) ( P1 t P0 ) e y p ( t ) P1 e
t t
( P1 t P0 ) e
t
t
( P1 t P1 P0 ) e
• 关于全解:
– 解的最根本形式为多项式与指数函数相乘; – 所有待定系数由系统的初始条件确定。
10
例1:微分方程经典解
某 LTI 系统的微分方程及输入和初始条件分别为
y ( t ) 3 y ( t ) 2 y ( t ) f ( t ) f (t ) 2 e
3t
(t )
19
例4:微分方程经典解
某 LTI 系统的微分方程及输入和初始条件分别为
y ( t ) 3 y ( t ) 2 y ( t ) f ( t ) f (t ) e (t ) y ( 0 ) 2 , y ( 0 ) 2
t
求系统的齐次解、特解和全解。 解: 特征方程: 2 3 2 0 特征根: 1 1, 2 2 t 2 t y h ( t ) C 1e C 2 e 齐次解: t y p ( t ) ( P1 t P0 ) e 特解:
A 1 cos A cos 2 A sin 3 1
1 2 tan 3
45
A 2
2e
t
全解:y ( t ) [
cos( 2 t 45 ) 2 ] ( t )
自由响应
强迫响应
17
例3的另一种求解方法
特征根: 1 1 j 2 , 2 1 j 2 齐次解:y h ( t ) C 1 e ( 1 j 2 ) t C 2 e ( 1 j 2 ) t 特解:y p ( t ) 2 全解:y ( t ) C 1 e ( 1 j 2 ) t C 2 e ( 1 j 2 ) t 2 确定C1和C2:y ( 0 ) C C 2 3 C 1 C