线性系统的状态空间描述
线性系统的状态空间描述

第一章 线性系统的状态空间描述 1. 内容系统的状态空间描述化输入-输出描述为状态空间描述 由状态空间描述导出传递函数矩阵 线性系统的坐标转换组合系统的状态空间方程与传递函数矩阵2. 基本概念系统的状态和状态变量状态:完全描述系统时域行为的一个最小变量组。
状态变量:构成系统状态的变量。
状态向量设系统状态变量为)(,),(),(21t x t x t x n 写成向量形式称为状态向量,记为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()(21t x t x t x t x n状态空间状态空间:以状态变量为坐标轴构成的n 维空间。
状态轨迹:状态变量随时间推移而变化,在状态空间中形成的一条轨迹。
3. 状态空间表达式设系统r 个输入变量:)(,),(),(21t u t u t u r m 个输出:)(,),(),(21t y t y t y m n 个状态变量:)(,),(),(21t x t x t x n例:图示RLC 电路,建立状态空间描述。
电容C 和电感L 两个独立储能元件,有两个状态变量,如图中所注,方程为)()()()()()(t i dtt du C t u t u t Ri dtt di LL c c L L ==++ )()(),()(21t u t x t i t x c L ==状态方程)(01)()(0/1/1/)()()()()()()()(212112211t u t x t x C L L R t xt x t x t xC t u t x t Rx t x L ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⇔⎩⎨⎧==++⇔输出方程[]⎥⎦⎤⎢⎣⎡==)()(01)()(21t x t x t u t y c 一般定义状态方程:状态变量与输入变量之间的关系[][][]t t u t u t u t x t x t x f t xdt t dx t t u t u t u t x t x t x f t xdt t dx t t u t u t u t x t x t x f t xdt t dx r n n n n r n r n );(,),(),();(,),(),()()();(,),(),();(,),(),()()();(,),(),();(,),(),()()(212121212222121111======用向量表示,得到一阶的向量微分方程[]t t u t x f t x),(),()(= 其中n n r r n n f f f f t u t u t u t u t x t x t x t x R R R ∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∙∙∙=∙∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=∈⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()(:)(,)()()(:)(,)()()(:)(212121输出方程:系统输出变量与状态变量、输入变量之间的关系,即[][][]t t u t u t u t x t x t x g t y t t u t u t u t x t x t x g t y t t u t u t u t x t x t x g t y r n m m r n r n );(,),(),();(,),(),()();(,),(),();(,),(),()();(,),(),();(,),(),()(2121212122212111=== 用向量表示为[]t t u t x g t y ),(),()(=4系统分类:1) 非线性时变系统[][]⎩⎨⎧==t t u t x g t y t t u t x f t x ),(),()(),(),()(2) 非线性定常系统[][]⎩⎨⎧==)(),()()(),()(t u t x g t y t u t x f t x3) 线性时变系统⎪⎩⎪⎨⎧+++++=+++++=rnr n n nn n n r r n n u t b u t b x t a x t a xu t b u t b x t a x t a x)()()()()()()()(1111111111111写成向量形式即为⎩⎨⎧+=+=)()()()()()()()()()(t u t D t x t C t y t u t B t x t A t x其中:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()()()()()()()(,)()()()()()()()()()(212222111211212222111211t b t b t b t b t b t b t b t b t b t B t a t a t a t a t a t a t a t a t a t A nr n n r r nn n n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()()()()()()()()()(,)()()()()()()()()()(212222111211212222111211t d t d t d t d t d t d t d t d t d t D t c t c t c t c t c t c t c t c t c t C mr m m r r mn m m n n4) 线性定常系统⎩⎨⎧+=+=)()()()()()(t Du t Cx t y t Bu t Ax t x5 状态空间表达式的系统结构图状态和输出方程可以用结构图表示,形象地表明系统中信号传递关系。
线性系统的状态空间描述
解:根据各元件的电流与电压关系、回路电压和等于
零,得到系统的方程:
RiLdi 来自t1 C
id t
ui
uo
1 C
id t
系统的输入、输出分别为
uui,yuo 24
第1章 线性系统的状态空间描述
状态变量选取方法不同,则状态空间描述不同。
a)选取状态变量 x1i,x2C 1 idtu0,则状态空
第1章 线性系统的状态空间描述
第一章 线性系统的状态空间描述
1.1 线性系统状态空间描述 1.2 线性定常连续系统状态空间表达式的建立 1.3 系统的传递函数矩阵 1.4 线性系统等价的状态空间描述 1.5 组合系统的状态空间描述
1
第1章 线性系统的状态空间描述
1.1 线性系统状态空间描述
一.系统数学描述的基本类型
输出量可以选作状态变量。 输入量不允许选作状态变量。
状态变量有时是不可测量的。
状态变量是时间域的。
系统的任意选取的两个状态变量组之间为线性非奇
异变换的关系。
11
第1章 线性系统的状态空间描述
状态向量:是由状态变量所构成的向量,即向量
x(t)x1(t),x2(t), ,xn(t)T称为n维状态向量。
22
第1章 线性系统的状态空间描述
一.根据系统机理建立状态空间表达式 根据系统机理建立状态空间描述的基本步骤: 1)根据系统所遵循的物理规律,建立系统的微
分方程或差分方程; 2)选取有关物理量 (变量) 作为状态变量,推导
出系统的状态方程和输出方程。
23
第1章 线性系统的状态空间描述
例1-1(P403例9-1):建立RCL网络的状态方程
第1章线性系统的状态空间描述

x&(t) Ax(t) Bu(t) y(t) Cx(t) Du(t)
• 情况1:输入u不含导数
y(n) an1y(n1) L a1y& a0 y bu
自主技术与智能控制研究中心
二、状态空间模型的建立
输入u不含导数 y(n) an1y(n1) L a1y& a0 y bu
选取状态变量 x1 y x2 y x3 y
I ml2 ml
自主技术与智能控制研究中心
ml M m
二、状态空间模型的建立
用一阶微分方程组表示系统模型!
&x& 1m2l2 g 1(I ml2 )u && 1(M m)mgl 1mlu
引入新的变量
x1 x x2 x&
x3 x4 &
x&1 x2
x&2 x&3
{1m2l x4
x&% Ax% Bu%
y%
Cx%
Du%
f1
A
f x
|x0
,u0
x1
M
fn x1
L O L
f1 xn
M
fn xn
B
f u
|x0 ,u0
,C
g x
|x0
,u0
,
D
g u
|x0 ,u0
自主技术与智能控制研究中心
二、状态空间模型的建立 例3:质量-弹簧-阻力器系统
自主技术与智能控制研究中心
u
线性化 0 V mg
m
d2 dt 2
(x
l
sin )
H
I&& Vl Hl
m d 2 (l cos) V mg
线性系统理论 第2章 线性系统的状态空间描述
u(k )
H (k )
x(k 1)
x(k )
单位延迟
C (k )
y(k )
G (k )
7/7,11/50
2.3.连续变量动态系统按状态空间描述的分类
线性系统和非线性系统
设系统的状态空间描述为 x f ( x, u, t ) y g ( x, u, t )
向量函数
g1 ( x, u, t ) f1 ( x, u, t ) g ( x, u , t ) f ( x, u , t ) ,g ( x, u, t ) 2 f ( x, u , t ) 2 g q ( x, u , t ) f n ( x, u , t )
和t≥t0 各时刻的任意输入变量组 u1 (t ),u2 t ,, u p (t ) 那么系统的任何一个内部变量在t≥t0各时刻的运动行为也就随之而完全确定
3/4,3/50
(2).状态变量组最小性的物理特征: 少一个不行,多一个没用 (3). 状态变量组最小性的数学特征:极大线性无关变量组 (4). 状态变量组的不唯一性 :任意
1/18,14/50
结论1
给定单输入,单输出线性时不变系统的输入输出描述,
y ( n) an1 y ( n1) a1 y (1) a0 y bmu ( m) bm1u ( m1) b1u (1) b0u
Y (s) bm s m bm1 s m1 b1 s1 b0 g ( s) U ( s) s n an1 s n1 a1 s a0
时变系统和时不变系统
f f ( x, u ) 若向量f,g不显含时间变量t,即 g g ( x, u )
第二章现代控制理论状态空间表达式
即
(2-11)
(3) 列出状态空间描述iL 1 − ( R + R )C 1 2 R1 L( R1 + R2 ) − R1 1 ( R1 + R2 )C uC ( R1 + R2 )C (2-12) + e(t ) R1 R2 iL R2 − L( R + R ) L( R1 + R2 ) 1 2
§2.1 状态空间描述的概念 2.1.2 控制系统的状态空间描述举例
例2-1 R-L-C系统,求其状态空间描述
R
u
L i
C
uC
解 (1) 确定状态变量 选择电容两端电压 uC (t )、电感通过的电流 i (t ) (2) 列写微分方程并化为一阶微分方程组 基尔霍夫(Kirchhoff)电压定律,
(2-13)
令
1 − ( R + R )C 1 2 A= R1 L( R + R ) 1 2
1 ( R + R )C 2 b= 1 R2 L( R + R ) 1 2
−
R1 ( R1 + R2 )C R1 R2 − L( R1 + R2 )
n 维列向量,状态向量
a12 a1n a22 a2 n an 2 ann
n×n方阵,系统矩阵(或状态矩阵), 反映系统状态的内在联系
§2.1 状态空间描述的概念
线性系统的状态空间描述

b1 hn1 an1hn2 an2 hn3 a1h0 ) u
(b0 an1hn1 an2 hn2 a1h1 a0 h0 )u
3/7/2014
选择 h0 , h1,使得上式中 , hn 1 u的各阶导 数项的系数都等于0,即可解得:
Ax Bu, y Cx Du x
x(k 1) Gx(k ) Hu (k )
线性定常离散系统
3/7/2014
y(k ) Cx(k ) Du (k )
状态空间分析法举例
例1求图示机械系统的状态空间表达式
外力 u(t)
K ---弹性系数 m
牛顿力学
阻 尼 系 数
3/7/2014
u (t ) Qa u (t ) u (t )
2)一个松弛系统当且仅当对任何输入u和任意 实数 , 均有 y Hu HQau Qa Hu Qa y
则称系统是定常的
2.2 状态空间的基本概念 1.状态:表征系统运动的信息和行为 2.状态变量:完全表征系统运动状态的最小一 组变量
x (t k 1 ) f ( x, u , t k ) g (t k ) g ( x , u , t k )
线性函数 线性系统
线性时变系统 线性定常系统
(t ) A(t ) x(t ) B (t )u (t ) x (t ) x(t ) D (t )u (t ) g (t ) c
a0 a1 a2
0
y 1
3/7/2014
0
x1 0 x2 x 3
2)
系统输入量中含有导数项 如果单输入—单输出系统的微分方程为:
现代控制理论3-1线性系统的状态空间描述
x1 , x 2 , ⋯⋯, x n
x1 = y ɺ x2 = y x3 = ɺɺ y ⋮ xn = y ( n −1)
第二步:求各个状态一阶导数,并代入原微分方程,有
ɺ x1 = x2 x = x ɺ 3 2 ⋮ x = x ɺ n−1 n xn = −a0 x1 − a1 x2 − ⋯⋯ − an−1 xn + β 0u ɺ
di 1 + Ri(t ) + ∫ i (t )dt = u (t ) dt C 1 u c (t ) = ∫ i (t )dt C L
(1)取流过电感L的电流i(t)和电容C两端电压uc(t) 作为系统的两个状态变量,分别记作 x1=i1和x2=uc,则有
dx1 L dt + Rx1 + x 2 = u (t ) dx 2 = 1 x 1 dt C y = x2
电路如图1.1所示 系统的控制输入量为u(t),系统输出为u 例1.2 RLC电路如图 所示 系统的控制输入量为 电路如图 所示,系统的控制输入量为 ,系统输出为 c(t) ,建立 系统的状态空间表达式。 系统的状态空间表达式。
解:该RLC电路有两个独立的储能元件L和C, 设回路电流为i(t),根据基尔霍夫电压定律和R、 L、C元件的电压电流关系,可得下列方程
n
x1 = y − β 0 u ɺ xi = xi −1 − β i −1u, i = 2,3, ⋯ , n
其中 β 0 , β 1 , ⋯ , β n −1 是n个待定系数。
根据上述定义有
x1 = y − β 0 u ɺ x 2 = x1 − β1u ɺ xi = xi −1 − β i −1u ɺ x n −1 = x n − 2 − β n − 2 u ɺ x n = x n −1 − β n −1u
第一章线性控制系统的状态空间描述lyq

X3
X0 X(t)
状态变量 完全表征系统运动状态的
X2
最小一组变量 X1
状态向量 以状态变量为分量所构成的向量
状态空间 以状态变量x1(t), x2(t)… xn(t)为坐标轴构成的 n维空间称为状态空间。系统在任何时刻的状 态都可用状态空间中的一个点来表示。随着时 间的推移,x(t)将在状态空间中描绘出一条轨迹, 称为状态轨迹。
和古典控制理论不同,状态空间描述考虑了“输入 -状态-输出”这一过程,它注意到了被输入-输 出描述所忽略了的状态。输入引起了状态的变化, 而状态才决定了输出的变化。因此状态空间描述是 对系统的结构特性的反映,而输入-输出描述只是 对系统的端部特性的反映。然而具有相同端部特性 的系统,都可以具有不同的结构特性经。这表明状 态空间描述是对系统的一种完全的描述。
P
m
x,v
f
1.1 线性控制系统的状态空间表达
例2 系统如图所示,输入为u,输出uc,列写 其动态方程
L
R2
u
iL
R1
uc
1.选择状态变量:
x1 iL , x2 u C ,
1.1 线性控制系统的状态空间表达
2 列写一阶微分方程组
iL
(uLdiL) 1CduC dt R1 dt
L
u
iL
R2 R1
t t0
yq gq(x1, ,xn;u1, ,up;t)
D(t)
u(t)
B(t)
•
X (t)
++
dt
X(t)
C(t)
+
+ Y(t)
A(t)
1.1 线性控制系统的状态空间表达
1.1.3 系统的状态空间描述列写举例
现代控制工程-第二章线性系统的状态空间描述

1 x3 s
1 s
1 x1 s
y(t )
2
3
8 64
解:第一步:化简方框图,使得整个系统只有标准积分器(1/s)、 比例器(k)及加法器组成。 第二步:将上述调整过的结构图中的每个标准积分器(1/s) 的输出作为一个独立的状态变量xi,积分器的输入端就是状态变 量的一阶导数dxi/dt。 第三步:写出每个状态变量的一阶微分方程,从而写出系统 的状态方程。
y Cx Du
图2-2 系统动态方程的方块图结构
状态空间分析法具有下列优越之处:
便于在数字计算机上求解;
容易考虑初始条件; 能了解并利用处于系统内部的状态信息; 数学描述简化;
适于描述多输入-多输出、时变、非线性、随机、离散等各类 系统,是最优控制、最优估计、辨识、自适应控制等现代控制系 统的基本描述方法。
例2.2.3求如图所示系统的动态方程。
(a)系统方块图
u(t )
s 1 s2
1 s3
1 s 2 8s 64
y(t )
(b)第一次等效变换
1 s3
u(t )
1 s2
1 s( s 8)
y(t )
64
(c)由标准积分器组成的等效方块图
u(t )
1 x4 s
(2-5)
y t cx t du(t )
,cn ,d为直接联系输入量、输出量 其中 c c1,c2, 的前向传递(前馈)系数,又称前馈系数。
多输入-多输出(含q个输出变量)线性定 常连续系统的输出方程一般表达形式为:
y1 c11 x1 c1n xn d11u1 d1 pu p yq cq1 x1 cqn xn d q1u1 d qp u p
第2章 线性系统的状态空间描述

定义2.5 [特征多项式] 特征多项式] 定义
2.4 线性时不变系统的特征结构
特征多项式α(s)的计算方法 的 特征多项式
莱弗勒(Leverrier)递推算法 递推算法 莱弗勒
2.4 线性时不变系统的特征结构
α ( s ) = s n + α n −1s n −1 + L + α1s + α 0
0 1 0 A = 0 0 1 0 −1 −1
5,化下列各状态方程为对角线规范型或约当规范型 化下列各状态方程为对角线规范型或约当规范型
8 −8 −2 2 3 & x = 4 −3 −2 x + 1 5 u 3 −4 1 7 1
0 1 4 & x= x + 2 u −9 −6
作 业
6,计算下列状态空间描述的传递函数 计算下列状态空间描述的传递函数 −5 −1 2 & x= x + 5 u 3 −1 y = [1 2] x + 4u 7,给定反馈系统如下图所示 给定反馈系统如下图所示
& 为 x1 = y , x2 = y ,列出系统的状态方程和输
出方程
u
+ −
&& y
+
∫
by 2
& y
二次部件
∫
y
+ + +
a (t )
k
作 业
2,试求出下列各个输入输出描述的一个状态空间描述 试求出下列各个输入输出描述的一个状态空间描述
&&& + 2&& + 6 y + 3y = 5u y y & &&& + 2&& + 6 y + 3 y = 7u + 5u & y y & & & 3&&& + 6 && + 12 y + 9 y = 6u + 3u y y
第二章线性系统的状态空间描述1
第二章 线性系统的状态空间描述§2-1 状态空间的基本概念1、状态:系统的状态,是指系统的过去、现在和将来的状况。
(如:一个质点作直线运动,它的状态就是它每个时刻的位置和速度)2、状态变量:能完全表征系统运行状态的最小数目的一组变量。
(如果用最少的n 个变量x 1(t), x 2(t),……, x n (t)就能完全描述系统的状态,那么这n 个变量就是一组状态变量。
)3、状态向量:设一个系统有n 个状态变量,即x 1(t),x 2(t),……,x n (t),用这n 个状态变量作为分量构成的向量x(t)称为该系统的状态向量。
记为Tn t x t x t x t x )](,),(),([)(21 =4、状态空间:由n 个状态变量作为坐标轴所构成的n 维空间,称为状态空间。
引入了状态和状态空间的概念之后,就可以建立动力学系统的状态空间描述了。
从结构的角度讲,一个动力学系统可用图2-1所示的方块图来表示。
其中x(t)表征系统的状态变量,u(t)为系统控制量(即输入量),y(t)为系统的输出变量。
与输入—输出描述不同,状态空间描述把系统动态过程的描述考虑为一个更为细致的过程:输入引起系统状态的变化,而状态和输入则决定了输出的变化。
5、状态方程:状态变量的一阶导数与状态变量、输入量的关系,称为系统的状态方程。
例:设单输入线性定常系统(LTI-Linear Time Invariant )的状态变量为x 1(t),x 2(t),……,x n (t),输入为u(t),则一般形式的状态方程为:)()()()()()()()()()()()()()()()()()()()()(2211222221212112121111t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x n n nn n n nn n n n ++++='++++='++++='图2-1 动力学系统结构示意图上式可写成向量—矩阵形式:其中:6、输出方程:在指定系统输出的情况下,该输出与状态变量、输入量之间的函数关系式,称为系统的输出方程。
线性系统理论(郑大忠)第2章
2013/11/22
线性系统理论
23
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
1、电路系统状态空间描述的列写示例
R1 C + uC iL R2 iC + -
由此,得 和,
X QX
X PX PQX
X QX QPX
显然, PQ QP I
即矩阵P和Q互逆。
结论:系统的任意选取的两个状态X和 X 之间 为线性非奇异变换的关系。
2013/11/22
线性系统理论
18
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
2013/11/22
线性系统理论
2
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
一、状态和状态空间
1、系统动态过程的两类数学描述 2、状态和状态空间的定义
2013/11/22
线性系统理论
3
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
1、系统动态过程的两类数学描述
线性系统理论
21
第2章 线性系统的状态空间描述
广东工业大学 自动化学院 自动控制系 陈玮
1、电路系统状态空间描述的列写示例
电路系统如图所示,设各组元件的参数值为已 知,取电压源e(t)为输入变量,电阻R2端电压uR2为输 出变量。 C
R1 iC + e (t ) -
L
+ uC iL R2
线性控制系统的状态空间描述

§3.3 Matlab 实验
1. 状态空间模型脉冲响应、阶跃响应和任意输入响
应
(1) [y,x,t]=impulse(a,b,c,d)
(2) [y,x,t]=step(a,b,c,d),其中y、x 和t 是输出、
状态向量和仿真时间。
(3) [y,x]=lsim(a,b,c,d,u,t,x0)。
例求管亠[0* x c£,为
u(t) =sint的状态输出值。
解程序和结果如下
-0.2
-0.4
2. 离散系统的脉冲响应、阶跃响应、任意输入响应
⑴[y, x]=dimpulse(sys);
(2) [y, x] = dstep( nu m,de n);
(3) [y, x]=dlsim(sys,u); 47y、x 和u 分别为输出、
状态和输入,sys可以是num,den或a,b,c,d,不绘图,当无y, x时直接绘图。
3 •连续和离散状态模型的零输入响应(只对初态x0 响应)
(1) [y,x,t]=i nitial(a,b,c,d,xO)
⑵[y,x,t]=dinitial(a,b,c,d,x0) ,y 为输出,x 为状态,
t为指定输出时间。
当不带y、x和t时,直接绘图。
4 •连续系统离散化
(1) [da,db,dc,dd]=c2dm(a,b,c,d,Ts)
⑵[dnum,dden]=c2d(num,den,Ts) , Ts 是采样周期。
5.矩阵指数
expm(a*t),其中t可为符号变量,也可为实值。
0 1
例如设A = 0',则求e At的命令和结果如下:
||-4 -4。
《自动控制原理》线性系统的状态空间描述
s
s
0 +
1
=
Gc11 (s) Gc21 (s)
5s
Gc12 (s) Gc22 (s)
式中 Gcij (s) 表示U j (s) 至 Yi (s)(i, j = 1,2) 通道的串联补偿器传递函数。可
以验证这种解耦系统的开环传递矩阵Gp (s)Gc (s) 为对角阵:
1
Gp
(s)Gc
(s)
=
=
1+
(s + 1) 1
U2 (s)
(s + 1)
+ 1+1
1 (s
+ 1)
• 1+1
1 (2s
+ 1) U1 (s)
1
2s +1
= s + 2 U 2 (s) + 2(s + 2) U1 (s)
其向量-矩阵形式为
1
Y
(s)
=
Y1 (s) Y2 (s)
=
2(s 2s
+ +
1) 1
2(s + 2)
0 1
U U
1 2
(s) (s)
=
'(s)U
(s)
s + 2
原系统闭环传递函数矩阵为
1
'
(s)
=
2(s 2s
+ +
1) 1
2(s + 2)
0
1
s + 2
串联补偿器 Gc (s) 的设计:由式(9-60)并考虑 H (s) = I 有
Gc
(s)
=
G
−1 p
(s)(s)[I
线性系统的状态空间描述-简

x = A(t ) x B(t )u y C (t ) x D(t )u
对前面引入的状态空间模型的意义,有如下讨论: 状态方程描述的是系统动态特性, x = A(t ) x B(t )u
‒ 其决定系统状态变量的动态变化。
y C (t ) x D(t )u
第二章 线性系统的状态空间描述
2.1 系统的状态空间描述
2.2 系统的状态空间表达式的分类
2.3 状态空间表达式的建立 2.4 线性时不变系统的特征结构 2.5 状态方程的约当规范形 2.6 由状态空间描述导出传递函数阵
2.7 系统系统在坐标变换下的特性
2.8 组合系统的状态空间描述 2.9 Matlab问题 小 结
ym
图1-3 多输入多输出系统示意图 (4)状态空间 以x1(t),x2(t),…,xn(t)为坐标轴构成的一个n维欧氏空 间,称为状态空间。
状态是指在系统中决定系统状态的最小数目的变量的有序集合。而所谓 状态空间则是指该系统的全部可能状态的集合。简单来说,状态空间可 以视为一个以状态变数为座标轴的空间,因此系统的状态可以表示为此 空间中的一个向量。
duc (t ) C i (t ) dt di (t ) L Ri (t ) uc (t ) u (t ) dt
将上式中状态变量的一阶导数放在方程左边,其余 项移至方程右边,整理得一阶微分方程组为:
du c (t ) 1 i (t ) dt C di (t ) 1 R 1 u c (t ) i (t ) u (t ) dt L L L
例:线性定常、单输入—单输出系统,外部描述为线 性常系数微分方程
y (n) an1 y (n1) a1 y (1) a0 y bn1u (n1) b1u (1) b0u
现代控制理论-线性系统的状态空间描述
c11(t) c12 (t) c1n (t)
C
(t)
c21
(
t
)
c22 (t)
c2n (
t
)
,
m n维输出矩阵 表 征 输 出 和 每 个 状 态 量 变 的 关 系
cm1(t) cm2 (t) cmn (t)
d11(t)
D(t)
d 21 ( t )
d12 (t)
d22 (t)
最小个数:意味着这组变量是互相独立的。一个用n阶微分方
程描述的含有n个独立变量的系统,当求得n个独立变量随时
间变化的规律时,系统状态可完全确定。若变量数目多于n,
必有变量不独立;若少于n,又不足以描述系统状态。
2021/8/24
电气信息学院《现代控制理论课程》
12
状态变量的选取具有非唯一性,即可 用某一组、也可用另一组数目最少的变量 (状态变量不唯一)。状态变量不一定要 象系统输出量那样,在物理上是可测量或 可观察的量,但在实用上毕竟还是选择容 易测量的一些量,以便满足实现状态反馈、 改善系统性能的需要。
常用符号: 积分器
比例器
ki
注:有几个状态变量,就建几个积分器
加法器
注:负反馈时为-
系统框图:
U
B
D
•
X
A
X C Y
X•
AX
BU
Y CX D U
2021/8/24
电气信息学院《现代控制理论课程》
22
线性时变系统状态空间描述:x A(t)x B(t)u y C(t)x D(t)u
t)
b11(t) b12 (t) b1r (t)
B(t)
b21 ( t )
现代控制理论(第二章)线性系统的状态空间描述
H[t0 ,)
yc
1
yc
u
t t0 0
容易得到其解
yc
(t )
e
1t
yc
(0)
t
e1
(t
)u(
)d
显然,若其初始条件
yc
0
(0)
不能确定,则不能
唯一地确定其输出。
1.非零初始条件与脉冲输入
零初始条件:系统的初始条件为零是指系统在初 始时刻没有能量储备。
注意:在建立线性系统的输入—输出描述时, 必须假设系统的初始条件为零。
单变量线性时变系统输入-输出关系: y L(u)
用符号 g(t,τ) 表示该系统的单位脉冲响应,即
g(t,τ)L( (t ))
注意: g(t,τ) 是双变量函数; τ— 代表δ函数作用于系统的时刻; t — 代表观测其输出响应的时刻。
结论1:对单变量线性时变系统,u(t)为其输 入变量,g(t,τ)为其单位脉冲响应,在初始
y
kp
u
s3 1s 2 2s 3
若对其参数一无所知,它的控制律设计就会复 杂得多,而稳定性的分析事实上是无法进行的。
系统的输入—输出描述仅在松弛的条件下才能采用。
若系统在t0时刻是非松弛的,输出 y[t0 ,) 并不能单
单由 u[t0 ,) 所决定,即关系式 不成立。考察简单的一阶系统:
y[t0 ,)
初始条件不为零时,可以将非零的初始条件等 效成在初始时刻的一个脉冲输入。
单位脉冲函数(δ函数 )
令
0
(t
t1
)
1
0
t t1 t1 t t1 t t1
当Δ→0时, (t t1) 的极限函数,即
《现代控制理论》线性系统的状态空间描述

关键:选取输出量导数为状态变量
【例】
设系统
u
y
y
y
y
6
7
41
6
=
+
+
+
&
&
&
&
&
&
解:
选择状态变量
令:
3.从微分方程出发
线性定常连续系统状态空间表达式的建立
则:
b. 系统输入量中含有导数
原则:使状态方程不含u的导数。
系统输入量中含有导数
线性定常连续系统状态空间表达式的建立
由上式求导得:
整理得:
则:
续
线性定常连续系统状态空间表达式的建立
注 意:这种方法不适用。 可先将微分方程画为传递函数,然后再由传递函数建立状态空间表达式。
注 意
线性定常连续系统状态空间表达式的建立
【例】
状态空间表达式为:
【例】 已知状态转移矩阵为
,试求
和A。
拉氏反变换,有
则
【例】试求状态方程的解。
,初始条件为
解:
拉氏变换法例题
线性定常连续系统状态方程的解
则:
三、 状态转移矩阵的性质 [要求熟练掌握]
证明:
有
成立
状态转移矩阵的性质
线性定常连续系统状态方程的解
5.
6.
7.
证明:
续
线性定常连续系统状态方程的解
其中:
(2)可观测标准型状态空间表达式为:
其中:
可观测标准形例题
线性定常连续系统状态空间表达式的建立
线性系统的状态空间描述
状态向量:是由状态变量所构成的向量,即向量
x(t)x1(t),x2(t),L,xn(t)T称为n维状态向量。
状态空间:以n个线性无关的状态变量作为基底所组 成的 n 维空间称为状态空间Rn。
状态轨线:随着时间推移,系统状态x(t)在状态空间 所留下的轨迹称为状态轨线或状态轨迹。
连续系统:
x&(t)f [x(t),u(t),t] y(t)g[x(t),u(t),t]
离散系统:
xy(t(ktk1))gf[[xx(t(ktk),),uu(t(ktk),)t,ktk]] 或 x(yk(k)1)g[fx[(xk()k,)u,(uk()k,)k,]k]
4.线性系统状态空间表达式:状态方程与输出方 程都是线性方程的系统是线性系统。线性系统的状态方 程是一阶向量线性微分方程或一阶向量线性差分方程。
关于状态的几点说明
系统的状态空间描述
状态变量组选取上的不唯一性: 由于系统中变量的个数必大于n,而其中仅有n个
是线性无关的,因此决定了状态变量组在选取上的不 唯一性。
➢状态变量不是所有变量的总和。 ➢输出量可以选作状态变量。 ➢输入量不允许选作状态变量。 ➢状态变量有时是不可测量的。 ➢状态变量是时间域的。
对于控制工程而言,它可能是被控对象、控 制装置,也可能是某些部件的串联、并联和反馈 组合。
图1-1 系统的方块图表示
✓ 图中方块以外的部分为系统环境; ✓ 环境对系统施加的作用或激励称为系统输入,
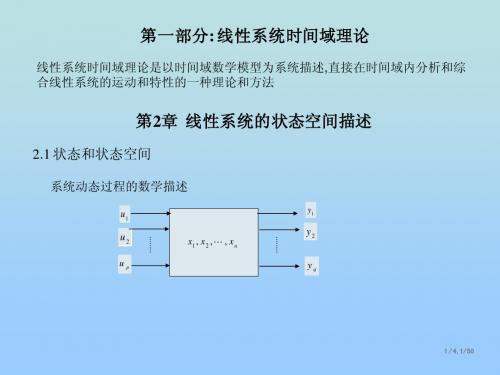
用向量 u[u1,u2,Lup]T表示; ✓ 系统对环境的作用(即从外部量测到的系统信
息)称为系统输出,用向量 y[y1,y2,Lyq]T表示; ✓ 系统输入和输出统称为系统的外部变量。 ✓ 描述系统内部状况的变量称为系统的状态变量,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1 系统的状态空间描述
2.2 系统的状态空间表达式的分类
2.3 状态空间表达式的建立 2.4 线性时不变系统的特征结构 2.5 状态方程的约当规范形 2.6 由状态空间描述导出传递函数阵
2.7 系统系统在坐标变换下的特性
2.8 组合系统的状态空间描述 2.9 Matlab问题 小 结
bn1s n1 b1s b0 y ( s) G( s) n u (s) s an1s n1 a1s a0
系统的内部描述,状态空间描述,完全的描述。
两个数学方程组成:
状态方程:微分方程或差分方程。 内部变量组和输入变量组间的因果关系。 输出方程:代数方程。 内部变量组、输入变量组和输出变量组间的转换 关系。
x
传感器
观测y 反馈控制
控制器
控制输入
典型控制系统方框图
u1 u2 up
被控过程
y1
x1 , x2 , xn
y2 yq
1.动态过程数学描述的两种基本类型。
一个系统用下图的一个方块来表征。
u1 u2 up y1 y2 yq
1
x1 , x2 , xn
系统输入:环境对系统的作用。 u
x(k 1) G(k ) x(k ) H (k ) x(k ), y(k ) C (k ) x(k ) D(k )u(k ), k 0,1, 2,
4.确定性系统和随机系统(P32) 确定系统是指系统的特性和参数是按确定的规律变 化的,其各个输入变量(包括控制和扰动)也是按 确定的规律而变化的。 不确定系统,系统的特性和参数的变化不能用确定 的规律来描述,或者作用于系统的变化(包括控制 和扰动)是随机变化,或者两者兼而有之。
ym
图1-3 多输入多输出系统示意图 (4)状态空间 以x1(t),x2(t),…,xn(t)为坐标轴构成的一个n维欧氏空 间,称为状态空间。
(5)状态方程 描述系统状态变量间或状态变量与系统输入变量 间关系的一个一阶微分方程组(连续系统)或一阶 差分方程组(离散系统),称为状态方程。
x Ax Bu
2.状态的基本概念 (1) 状态 状态是完全地描述动态系统运动状况的信息, 系统在某一时刻的运动状况可以用该时刻系统运 动的一组信息表征,定义系统运动信息的集合为 状态。 (2)状态变量 定义完全表征动态系统时间域运动行为的信 息组中的元素为状态变量。状态变量组常用符号 x1(t),x2(t),…,xn(t)表示,且它们相互独立(即变量 的数目最小)。
将上式中状态变量的一阶导数放在方程左边,其余 项移至方程右边,整理得一阶微分方程组为:
du c (t ) 1 i (t ) dt C di (t ) 1 R 1 u c (t ) i (t ) u (t ) dt L L L
上式即为图1所示电路的状态方程,并将其写成向 量-矩阵形式,即
x = Ax Bu y Cx
3.离散系统的状态空间描述 当系统的各个变量只在离散的时刻取值时,这种系 统称为离散时间系统简称离散系统。其状态空间描述 只反映离散时刻的变量组之间的因果关系和转换关系。 是用 k 0,1, 2, 来表示离散的时刻,那么离散系统状 态空间描述的最一般形式为: x(k 1) f ( x(k ), u(k ), k ), k 0,1, 2, y(k ) g( x(k ), u(k ), k ), 对于线性离散时间系统,则上述状态空间描述还 可进一步化为如下形式 :
矩阵 A(t ) ,B(t ) ,C (t ) 和 D(t ) 的各个元素如果与时间 无关,则称这种系统是线性定常系统
x Ax Bu y Cx Du
式中的各个系数矩 阵为常数矩阵
为简便, 线性定常系统的状态空间模型亦可简记为 (A,B,C,D)。
几种简记符的意义:
du c (t ) dt 0 di(t ) 1 dt L 1 u c (t ) 0 C 1 u (t ) R i(t ) L L
x1 令 x1 u c (t ), x2 i(t ) ,记 x x 2
x(k 1) Gx(k ) hu(k )
【例2-2】建立图2-1所示RLC电路的状态方程。 取电容上的电压uC (t)和电感中的电流i(t)作为状态 变量,根据电路原理有
duc (t ) C i (t ) dt di (t ) L Ri (t ) uc (t ) u (t ) dt
例:线性定常、单输入—单输出系统,外部描述为线 性常系数微分方程
y (n) an1 y (n1) a1 y (1) a0 y bn1u (n1) b1u (1) b0u
其中: ai和bj 为实常数。i=1,2, …,n-1; j=1,2, …,n-1 假定初始条件为零,取拉氏变换。 复频率域描述,即传递函数。
1 0 x1 x1 0 C 1 1 u R x 2 x2 L L L x1 y 1 0 x 2
系统的状态空间描述是其动力学特征的完整的表征。 各类系统在结构上和特性上的质的差别,将表现为它 们的状态空间描述在类型上的不同。 线性系统和非线性系统 向量方程 X f x, u, t 和 Y g x, u, t 的所有元都是变 量 x1,…, xn和u1,…, ur的线性函数,则相应的系统 为线性系统。 x f ( x, u, t ) y g ( x, u, t ) 向量方程 X f x, u, t 和Y g x, u, t 至少包括一个元是 变量 x1,…, xn和u1,…, ur的非线性函数,则相应 的系统为非线性系统。 现实中的一切实际系统严格地说都属于非线性系统。
dx(t ) x1 x dt x2
式(1-4)可简写为
0 A 1 L 1 C R , L
x Ax Bu
0 B1 L
式中
(6)状态空间表达式 状态方程和输出方程合起来构成对一个动态系统 完整的描述,称为动态系统的状态空间表达式。 图1-2所示电路, 若uC (t)为 输出,取x1=uC (t),x2=i(t)作为 状态变量,则其状态空间表 达式 y1 y2 yq 统称为系统的外部变量 内部变量:刻画系统在每个时刻所处状况的变量。 x1,x2,…,xn ,体现了系统的行为。
数学描述、数学模型:反映系统变量间因果关系和变 换关系。 系统的外部描述:输入—输出描述,不完全的描述。
不表征系统的内部结构和内部变量,只反映外部 变量间的因果关系,即输出和输入间的因果关系。
x = A(t ) x B(t )u y C (t ) x D(t )u
外部描述 外部描述把系统的输出取为系统外部输入的直接响 应,显然这种描述把系统当成一个“黑匣”,认为 系统的内部结构和内部信息全然不知,系统描述直 接反映了输出变量与输入变量间的动态因果关系。 内部描述 内部描述是基于系统内部结构分析的一类数学模型, 能够完全反映系统的所有动力学特性。
2.2 系统的状态空间表达式的分类
1. 线性系统的状态空间描述
若向量方程中 x = f ( x,u, t ) 和 y g( x,u, t )的所有组 成元都是变量 x1 , x2 ,, xn 和 u1 , u2 ,, ur 的线性函数, 则称相应的系统为线性系统。而线性系统的状态空间 描述可表示为如下形式:
2.1 系统的状态空间描述
典型控制系统由被控对象、传感器、执行器和 控制器组成。 被控过程具有若干输入端和输出端。 数学描述方法: 输入-输出描述(外部描述): 高阶微分方程、传递函数矩阵。 状态空间描述(内部描述):基于系统内部结 构,是对系统的一种完整的描述。
控制u
被控过程 执行器 被控对象
x Ax Bu ( A, B, C ) : y Cx
( A, B) : x Ax Bu
x Ax ( A, C ) : y Cx
当系统的输出与输入无直接关系(即 D 0 )时, 称为惯性系统;相反,系统的输出与输入有直接关系 (即 D = 0 )时,称为非惯性系统。大多数控制系统 为惯性系统,所以,它们的动态方程为
式中,各个系数矩阵分别为
a11 (t ) A(t ) an1 (t ) c11 (t ) C (t ) cm1 (t )
x = A(t ) x B(t )u y C (t ) x D(t )u
a1n (t ) b11 (t ) b1r (t ) , B (t ) bn1 (t ) bnr (t ) ann (t ) c1n (t ) d11 (t ) d1r (t ) , D(t ) d m1 (t ) d mr (t ) cmn (t )
输出方程描述的是输出与系统内部的状态变量的关 系。 系统矩阵A表示系统内部各状态变量之间的关联情况,
‒ 它主要决定系统的动态特性。
输入矩阵B又称为控制矩阵,
‒ 它表示输入对状态变量变化的影响。
输出矩阵C反映状态变量与输出间的作用关系。 直联矩阵D则表示了输入对输出的直接影响,许多 系统不存在这种直联关系,即直联矩阵D=0。
(3)状态向量 设x1(t),x2(t),…,xn(t)是系统的一组状态变量,把这 些状态变量看作向量x(t)的分量,则x(t)就称为状态 向量,记为
x1 (t ) x (t ) x n (t )
u1 u2
y1 y2
…
… ur