瑞德佑业自动化手册-2018.10
EMG调试手册

二、执行器技术数据
不同系列的 DREHMO 电动执行器技术数据可以按照用户的要求打印出来给用户参考。 2.1 工作方式 DREHMO 控制执行器及调节执行器的两种 S2/S4 工作方式。
DMC/DiM 120 DMC/DiM 250
DMC/DiM 30 DMC/ DiM 59
DMC/DiM 500 DMC/DiM 60
2.2 防护形式 执行器的防护形式 IP 在执行器的铭牌上有标注。在常规配置情况下执行器是适合户外安装使用的,它能够
使用手册 第 4 页,共13页
完全防护外界粉尘的侵入,也可防护水的短时浸泡(防护等级 IP67,依照 DIN EN 60529/ IEC 529)。作为选项 也可提供防护等级为 IP68 的电动执行器。IP68 的防护标准可使执行机构在潜入水的情况下正常工作。 2.3 技术参数 供电电压 供电电流 供电频率 功率 绝缘等级 环境温度 电缆截面 按照说明书标示,单位 [V], ±10% 按照说明书标示,单位 [A] 按照说明书标示,单位 [Hz], ±3% 按照说明书标示,单位 [kW] II 按照 DIN EN 61010 -25°C 到 +70°C (DiM 系列) -25°C 到 +60°C (DiMR 系列) 最小 1.5mm2 , 适用电机功率最大到 1.6kW/400V(AC 3ph);最小 2.5mm2 适用于电机功率 最大到 8.5kW/400V (AC 3ph)对更大的电缆截面请询问。 普通的溶解保险丝或针对感应载荷(电机)的自动保护装置: 16A 用于最大到 1.6kW/400V (AC 3ph)电机测量功率。 25A 用于 1.6kW 到 8.5kW/400V (AC 3ph) 电机测量功率。 螺纹连接: 0,5 到最大 2,5 mm2 最大 230V AC 0,3 A, 30V DC 2 A (欧姆荷载) 超压范围 I ≤ 300 欧姆 <海拔 2000 米。 当 >海拔 2000 米时请咨询生产商。 因为在不同的环境温 度下对绝缘和负荷强度有不同的限制。 IP67,当使用相应的电缆导入端口且密封完好时。 也可选择 IP 68 防护等级。 在执行器内部污染度为 1 (IEC 664) 在执行器外部污染度为 2 (IEC 664) 最大 95% / 31°C 当执行器标称电压>500V 或者接触器电压>60V 时,必须将控制单元 的电势参照点 0V 同 PE 相连。在电控板上将 X9 PE 和 GND 端子短 接。 其它的技术参数请咨询办事处。 2.4 手动操作 (“手轮”) 手轮用于断电时手动调节驱动设备或阀门的位置。不需要对执行器进行从电动到手动的离合切换操作。 向右转动手轮导致驱动套的右转 (从执行器向阀门方向看)。 2.5 运输和仓储 对正确的执行器运输方式(通过吊车)在下图给出了示意。 图1: 通过吊车对执行器搬运 • • • • • • 不要将起重机械的绳索挂在手轮或电机螺栓上。 仓储在通风和干燥的房间。 安装在户外时应接上电源。 当存放在潮湿的环境时,应接通电源。 对地面的潮气进行防护(应将执行器仓储在货架或类似的撑起的支架上)。 裸露的金属表面涂上合适的防锈剂。
自动化作业指导书

自动化作业指导书一、引言自动化作业指导书是为了帮助员工正确、高效地完成自动化作业而编写的一份指导文件。
本指导书旨在提供详细的操作步骤、注意事项和相关数据,以确保作业的质量和安全。
二、作业概述本次自动化作业的目标是实现某产品的生产线自动化生产。
该生产线包括以下主要设备:输送带、机械臂、传感器、PLC控制系统等。
作业的主要步骤包括设备准备、程序配置、生产线调试和运行等。
三、作业准备1. 确保工作区域整洁有序,无杂物和障碍物;2. 检查所需设备是否完好,如输送带是否正常运转,机械臂是否灵活等;3. 检查PLC控制系统是否正常运行,如输入输出模块是否连接正常,程序是否正确加载等;4. 确保所需物料和工具齐全,如产品零件、螺丝刀、电缆等。
四、程序配置1. 连接电脑和PLC控制系统,确保通信正常;2. 打开PLC编程软件,加载相应的程序;3. 配置输入输出模块,确保与设备的连接正确;4. 设置传感器的参数,如灵敏度、触发条件等;5. 编写运行逻辑,包括设备的启动、停止、故障处理等。
五、生产线调试1. 将产品零件放置在输送带上,确保输送带正常运转;2. 启动机械臂,检测其动作是否准确、稳定;3. 触发传感器,检测其是否能正确感知产品的位置和状态;4. 检查PLC控制系统的输出信号,确保设备按照预期运行;5. 根据需要进行调整和优化,如调整机械臂的抓取力度、传感器的触发条件等。
六、作业运行1. 确保所有设备和程序配置正常;2. 将产品零件放置在输送带上,启动生产线;3. 监控生产线的运行情况,包括设备的工作状态、产品的质量等;4. 定期检查设备的运行状况,如机械臂的润滑、传感器的清洁等;5. 及时处理设备故障和异常情况,确保作业的连续性和稳定性。
七、安全注意事项1. 在作业过程中,严禁将手部或其他身体部位靠近运动中的设备;2. 使用工具时,要注意安全操作,避免误伤自己或他人;3. 确保设备和电源的接地良好,避免电击和火灾的发生;4. 在调试和运行过程中,注意观察设备的运行状态,及时发现并处理异常情况;5. 遵守相关安全规定和操作规程,确保作业安全。
自动化作业指导书

自动化作业指导书一、引言自动化作业指导书旨在为操作人员提供详细的操作步骤和注意事项,以确保作业过程的安全性、高效性和准确性。
本指导书适合于自动化设备的日常操作和维护,旨在匡助操作人员正确操作设备,提高工作效率,降低操作风险。
二、设备概述1. 设备名称:自动化设备A2. 设备型号:XYZ-12343. 设备功能:自动化设备A用于完成特定的生产工艺,包括材料输送、加工、检测等环节。
三、操作步骤1. 准备工作在操作设备之前,需要进行以下准备工作:- 确保设备处于正常工作状态,无故障和异常情况。
- 检查设备所需材料和工具是否齐全。
2. 启动设备按照以下步骤启动设备:- 将电源插头插入电源插座,并确保电源开关处于关闭状态。
- 检查设备各部份连接是否坚固。
- 打开电源开关,并观察设备是否正常启动。
3. 设备操作根据具体的工作流程,按照以下步骤操作设备:- 步骤1:将待加工材料放置在指定位置。
- 步骤2:调节设备参数,如加工速度、温度等。
- 步骤3:按下启动按钮,设备开始自动加工。
- 步骤4:观察设备运行状态,确保加工过程正常进行。
- 步骤5:在加工完成后,及时住手设备并关闭电源开关。
4. 设备维护为确保设备的正常运行和延长设备的使用寿命,需要进行定期的设备维护工作:- 清洁设备表面和内部零部件。
- 检查设备各部份连接是否松动,如有松动及时紧固。
- 润滑设备运动部件,如需要更换润滑油及时更换。
- 定期检查设备电气部份是否正常,如有异常及时修复。
四、安全注意事项在操作自动化设备时,需要注意以下安全事项:- 操作人员必须熟悉设备的操作流程和安全规范。
- 禁止未经授权的人员操作设备。
- 在操作设备时,应戴好个人防护装备,如手套、护目镜等。
- 在设备运行过程中,禁止将手或者其他物体伸入设备内部。
- 在设备故障或者异常情况下,应即将住手设备并寻求专业维修人员的匡助。
五、问题解决在操作设备过程中,可能会遇到一些常见问题,如设备故障、加工异常等。
自动化作业指导书

自动化作业指导书一、概述自动化作业指导书是为了匡助操作人员正确、高效地完成自动化设备的操作和维护工作而编写的。
本指导书包含了设备的基本信息、操作步骤、故障排除方法等内容,旨在提供清晰明确的指导,确保操作人员能够正确操作设备,保障生产的顺利进行。
二、设备基本信息1. 设备名称:XXXX自动化设备2. 设备型号:XXXXX3. 设备功能:实现XXXXX功能,如装配、测试、包装等4. 设备特点:高效、稳定、可靠、易操作等三、安全注意事项1. 操作人员必须熟悉设备的安全操作规程,并佩戴相关的个人防护装备。
2. 在操作设备之前,确保设备处于住手状态,并断开电源。
3. 禁止擅自拆卸设备零部件,如需维修,请联系专业人员。
4. 在设备运行过程中,禁止将手或者其他物体伸入设备内部,以免发生意外伤害。
5. 当设备发生异常情况时,应即将住手操作,并进行故障排除。
四、操作步骤1. 设备启动a. 检查设备的电源连接是否正常。
b. 打开设备的电源开关,确保设备处于待机状态。
c. 检查设备的各个部件是否正常运行,如有异常,请及时处理。
2. 设备操作a. 根据生产任务,调整设备的工作模式和参数设置。
b. 将待加工的物料放置到设备的进料口,并确保物料的正确摆放。
c. 启动设备,观察设备的运行状态,确保设备正常工作。
d. 在设备运行过程中,定期检查设备的运行情况,如有异常,请及时处理。
3. 设备住手a. 完成生产任务后,将设备切换到住手状态。
b. 关闭设备的电源开关,断开电源。
c. 清理设备内部的残留物,确保设备的卫生和整洁。
d. 对设备进行定期的维护和保养,保证设备的正常运行。
五、故障排除1. 设备故障分类:根据故障的性质和原因,将设备故障划分为机械故障、电气故障、传感器故障等。
2. 故障排除方法:根据故障的具体表现和可能的原因,提供相应的故障排除方法和步骤。
六、常见问题解答1. 问题1:设备无法启动。
解答:请检查设备的电源连接是否正常,电源开关是否打开,以及设备是否处于待机状态。
瑞得恩-光伏清洁机器人手机安卓 APP 使用说明书

苏州瑞得恩光能科技有限公司江苏省苏州市吴中区胥口镇子胥路 636 号蘇州瑞得恩光能科技有限公司中華人民共和国江蘇省蘇州市呉中区胥口鎮子胥路 636 号Suzhou Radiant Photovoltaic Technology Co., Ltd瑞智辉瑞 智 輝USER GUIDE- 光伏清洁机器人手机安卓APP 使用说明书-ラディアント製 パネル清掃ロボット取扱説明書- Operating Instructions for Android APP of Photovoltaic Cleaning Robot • 安卓APP• 安卓APP• Android APP简体中文 / Simplified Chinese目录一、引言 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 31.1 关于说明书 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙31.2 关于APP ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 3二、功能简介 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 32.1 功能支持 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙32.2 运行环境 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 32.3 下载安装 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 3三、使用说明 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 4-143.1 登陆模式 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 4-53.2 工作模式 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 63.3 画图模式 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 6-113.4 设置模式 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 11-143.5 退出 ∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙ 14一 引言1.1 关于说明书本说明书为指导瑞得恩光能科技有限公司PG12型清洁机器人产品用户使用安卓手机和机器人进行交互而编写,该说明书主要讲述了如何正确的使用APP,了解各个界面模块所对应的功能,以更快地让用户熟悉APP和机器人进行交互的方法。
自动化作业指导书

自动化作业指导书一、任务背景随着科技的不断进步和应用领域的不断扩大,自动化技术在工业生产、家庭生活、交通运输等方面发挥着越来越重要的作用。
为了提高生产效率和生活质量,许多企业和个人开始关注自动化技术的学习和应用。
为了匡助大家更好地了解和掌握自动化作业的基本知识和技能,特编写了本指导书。
二、任务目的本指导书的目的是提供一份详细的自动化作业指导,旨在匡助读者了解自动化作业的基本概念、原理和操作方法,掌握自动化设备的使用技巧,提高自动化作业的效率和质量。
三、任务内容本指导书主要包括以下内容:1. 自动化作业的概念和原理- 自动化作业的定义和分类- 自动化作业的基本原理和流程2. 自动化设备的使用方法- 自动化设备的组成和工作原理- 自动化设备的操作步骤和注意事项3. 自动化作业的案例分析- 不同行业中的自动化作业案例- 自动化作业的优势和挑战4. 自动化作业的技能培养- 自动化作业所需的基本技能和知识- 自动化作业技能的培养方法和途径四、任务步骤1. 自动化作业的概念和原理自动化作业是指利用计算机、机械、电子等技术手段,通过对工作过程的自动控制和监测,实现对生产、生活等活动的自动化处理。
自动化作业可以分为工业自动化、家庭自动化、交通运输自动化等多个领域。
其基本原理是通过传感器感知环境信息,经过控制器的处理和判断,控制执行机构完成相应的操作。
2. 自动化设备的使用方法自动化设备通常由传感器、控制器和执行机构组成。
传感器用于感知环境信息,控制器用于处理和判断感知到的信息,执行机构用于执行相应的操作。
在使用自动化设备时,需要先了解设备的组成和工作原理,然后按照设备的操作步骤进行操作。
同时,还需要注意设备的安全使用,避免操作中浮现意外情况。
3. 自动化作业的案例分析自动化作业在各个行业中都有广泛的应用。
以工业自动化为例,可以通过自动化设备实现生产线的自动化作业,提高生产效率和产品质量。
在家庭生活中,可以通过智能家居系统实现家庭设备的自动化控制,提高生活的便利性和舒适度。
drehmo使用手册

2.5
运输和存储......................................................................................................................
7
3
执行器启动.....................................................................................................
13
3.3
一体化电子控制单元.......................................................................................................
14
3.3.1
带传统力矩和行程开关的Matic C图...............................................................................
如您的产品未从德瑞中国办事处或授权代理商处采购,德瑞中国将不提供质量保证,并且只能提供有偿的售后服务及技术支持。”
1
安全条款........................................................................................................
DREHMO-Matic C
一体化电动执行器安装、调试、维护手册
该手册适用于开关型、步进型和调节型电动执行机构
总的说明
DREHMO电动执行器包含下列不同的文件:
(取决于供货时设备的不同选项)
XRotor-X11-18S 单轴载荷保护系统用户手册说明书

100%34775113.27809.73909 4.5【Protection】1)Start protection:When the power is connected normally,the ESC will first start the self-test.If the self-test is successful,it will run normally after beeping.If the self-test fails,it will not start and the flashing light will warn.2)Stall Protection:When the ESC detects that the motor is locked,the ESC will completely turn off the output and will not restart the motor.At this time,it is necessary to power on again to clear the error and restart the ESC to restore power output.3)Current Protection:When it detects that the instantaneous current abnormality reaches close to300A,the ESC will restart immediately,and the output will be turned off if the detection times reach abnormality five times in a row,and it will return to normal after the power is turned on again.4)Throttle signal loss protection:When the ESC detects that the throttle remote control signal is lost for more than0.25seconds,it will immediately turn off the output to avoid greater losses caused by the continued high-speed rotation of the propeller.After the signal is restored,the ESC will immediately restore the corresponding power output.【Warning tone description】Symptom Tone Possible causes Possible solutionsMotor fails to start after power on “Beep beep beep”rapidmonotone Throttle is not reset to zeroPush the throttle to the lowest point orrecalibrate the throttle pointMotor fails to start after power on “Beep,Beep,Beep”(1second for each interval)No throttle signal input on thereceiver throttle channelCheck if transmitter and receiver isnormal.Check if wiring of throttlechannel is normalThe power-on voltage is lower than18V or higher than63V “Beep,Beep,Beep”(1second for each interval)Battery voltage is too low Replace with a full-charged battery【Daily usage】1.Adjust LED light colorUse a tool to take out the M3×8screws that fasten the lampshade,and set the switch according to the corresponding light color below(factory default green).After the setting is successful,assemble and fasten the lampshade in the original way.Dial code on/off1Dial code on/off2Dial code on/off3LED colorON ON ON WhiteON OFF ON Light blueON ON OFF PurpleON OFF OFF BlueOFF ON ON YellowOFF OFF ON GreenOFF ON OFF RedOFF OFF OFF LED on/off2.Description of light color statusSelect light color before itblinksMeaning SolutionContinuous single shortflashOver-voltage Replace the battery(battery below82V) Continuous2short flash Under-voltage Replace the battery(battery higher than18V)Continuous3short flash Over-current Power on again,and check the motor for foreign objectsContact after sales service Continuous single longflashThrottle lost-Check connection between signal line to the flight controller-Check whether the remote controller and flight controller areturned on-Check the resistance of the black and white wires,if there is ashort circuit,contact the after-sales service Continuous(Single longflash+Single short flash)Throttle not reset to zero This problem occurs during the rotation of the motor.Please check theaircraft battery and circuit.There is a short circuit on the circuit.Continuous(Single longflash+2short flash)MOS overheated(Over110℃)Cool down the power system and power on againContinuous(Single longflash+3short flashes)Capacitor overheated(Over110℃)Cool down the power system and power on againContinuous(Single longflash+4short flashes)Trigger stall protection-Restart after the throttle is reset to zero-Please check if there is any foreign matter in the motor,remove the foreign matter before starting Continuous(2longflashes)Short-circuit Please check whether the motor circuit is intactContact after sales service Continuous(2longflashes+single shortflash)Short-circuit Please check whether the motor is in good conditionContact after sales serviceContinuous(2longflashes+2short flash)Short-circuit Please check whether the motor is in good conditionContact after sales service Continuous(2longflashes+3short flash)Phase A operationalamplifier is abnormalRe-power on to return to normalContact after sales service Continuous(2longflashes+4short flash)Phase B operationalamplifier is abnormalRe-power on to return to normalContact after sales service Continuous(3longflashes)Phase C operationalamplifier is abnormalRe-power on to return to normalContact after sales service3.Abnormal LED alarm during power-onLED Tone Possible causes Possible solutions Continuous single shortflash(0.5second for eachinterval)“Beep beep beep”rapidmonotone(0.5second foreach interval)Throttle is not reset to zero Push the throttle to the lowest point orrecalibrate the throttle pointLED on“Beep,Beep,Beep”(0.5second for each interval)The output data and upgradelines has short-circuited.Check the yellow,red and green cables Continuous single shortflash(1second for eachinterval)No beep Phase is abnormal.Contact after sales service4.Replacing the propeller1)Use the appropriate tools to take out the two propeller fastening screws in and replace them with intact propellers.If you need to replace the propeller clips,continue to take out the fastening screws and replace the whole set of propeller clips and propellers.2)Installing the propeller clip blades-Firstly,install the bottom cover on the motor,followed by the propeller blades,propeller gaskets,upper cover(propeller clips)and the final screws in order;pay attention to the installation of the propeller screwsAfter clamping,the propeller should rotate freely,and make sure that the propeller clamp and the motor fastening screw are tightened and screw glue is used at the same time.5.Firmware upgradeUse the Hobbywing DataLink V2box to upgrade the program,and ESC not supported DataLink V1box.Upgrade step according to the DataLink V2box user of manual.6.ESC work data checking1),Use the Hobbywing DataLink box to check ESC work data.According to the DataLink V2box user of manual.2),ESC work data by serial communication.Flight control needs to support Haoying protocol to obtain ESC data.【After-sale maintenance】In the event that the equipment of the power system is damaged,please contact Hobbywing after-sales customer service immediately. Under the premise of not affecting the performance,make sure that you can use the Hobbywing power system kit accessories for replacement after contacting the customer ers are prohibited from configuring accessories by themselves(such as screws, paddle clips,propellers)for replacement.。
克劳瑞德模块说明书
⬉ᆍᗻ䋳䕑
100 80 60 40 20 0 20 40 60 80 100
100%
KVA
Cos ϕ 0.5
10 0
%
A KV
Cos ϕ 0.9
100% KW
Cos ϕ 1 25 50 75 100
100% KW
Kw
Cos ϕ 0.9 Cos ϕ 0.8 Cos ϕ 0.6
⬉ᛳᗻ䋳䕑
MP-NET˖ᦤկ᳔㋏㒳ৃ⫼ᗻˈ⒵䎇乍Ϯࡵ䳔∖ 䇪䇻⤪䇤㚄㌊鼻㪉ェ᷍ MP-NET 䄸 䇻➓䓑巛㸍㾿᷍ MTTR ᷉㠞㉚㸍㾿 㬒ヅ᷊れ㾂᱄ MP-NET 䐈⧷㚄㌊㦩⥆➯᷍䊻ⷝ ⮈䊕㚄㌊㬒㸿㿉ㅌ䊹㣱⭞㝵㔘 ⹊⮈᷍㋪⡄⧷䔏⫔⭥䊹➓㦌㾵᱄ 㚄㌊㋪㬖㻷䊻㼀㳇巛㪞᷍ⰵ䇻 䎜㳆㻖㵔⤜。⥛㪛㦯工ⴈ㻶᱄ 㗠⮈䊕㚄㌊㳂⹊5A⨅⮈⮈㒘᷍㋪ ⡄䐅㻖㵔㶋㦌㧀䈁巛⧅㠻䓵䑘㿏⮈ ⧹㞅䐤᷍㋪䈌ⷘ䐷➓䓑㏁㾮㼁デ 㦾᱄ ⮈䊕㚄㌊㦩⥆➯㾵㚽㬚 MP-NET ⷝ ゴ㬫己⤃㾱㧀䈁㞅䐤᷍㲹⢑㬨䊻➓ 䓑㋶ヅ䇱㈷㻿㬒᷍䇦㬧䇩㸋㵜⨗᱄
20
40
60
80
20 18
40 36
60 54
80 72
400 (300⭞480᷊᷍㧞㼁+䐱㾵㼀 400 ± 10% (380 V, 415 V ㋪䁂᷊㧞㼁䐱㾵㼀 50 ± 10% (60 Hz ㋪䁂) <5 >0,99
⡟ゝ㭖㬷⥂㚻㦾㆗㸋ⶦ䄋㾦㻃᷍㡅㚻㦾⤃⤜㚽⧪㸋㦯工䄋䊝〓己㵍⭥䄜⤠᱄⹌㯟⡄㒕ⰵ⥛㠘㠘䐫⤜ⰰⶥ㑝巛ⳃ䍚⭥㦉㏜᷍㧈䇱㦯工㭞㈾⢅鼻㯂⤜㒎㾱㵉䐋 MKA4L0CHMPN REV.2 - 01/2010
㡅㰜⺛コ㑋㻖Ⳟ㬞᷍㤌ⳤ㸫㶙䍟
MKA4L0CHMPN
㒧ᵘ㋻ޥ 60 kVA᷉N+1㞅䐤᷊⨀⫈ᷛ㌎ 520xⷀ1165 x 㪏910᱄
自动化作业指导书

自动化作业指导书一、引言自动化作业指导书旨在为工作人员提供详细的操作步骤和相关要求,以确保工作的准确性和高效性。
本指导书适用于自动化作业领域的各个环节和工作岗位。
二、作业背景自动化作业是指利用计算机、机器人和传感器等技术手段,实现工作过程的自动化和智能化。
自动化作业的目标是提高生产效率、降低生产成本、提升产品质量,并减少人为操作的风险。
三、作业准备1. 确认作业目标:明确作业目标,包括作业的具体内容和要求。
2. 准备工作环境:确保作业环境符合安全要求,包括通风、照明、消防等方面。
3. 核对设备状态:检查自动化设备的工作状态和性能,确保设备正常运行。
4. 确保材料准备充分:检查所需材料的数量和质量,确保充分供应。
四、作业流程1. 开启自动化设备:按照设备操作手册的要求,正确开启自动化设备。
2. 设定作业参数:根据作业要求,设定自动化设备的相关参数,包括速度、温度、压力等。
3. 操作程序选择:根据作业要求,选择合适的操作程序,并加载到自动化设备中。
4. 开始作业:按照操作手册的要求,启动自动化设备,开始作业。
5. 监控作业过程:通过设备界面或监控系统,实时监控作业过程,确保作业正常进行。
6. 处理异常情况:在作业过程中,如遇到设备故障、材料不足等异常情况,及时处理并记录。
7. 完成作业:作业完成后,停止自动化设备,清理现场,整理相关数据和文档。
8. 作业记录与报告:按照要求,记录作业过程中的关键数据和信息,并撰写作业报告。
五、作业安全与质量控制1. 安全措施:在作业过程中,严格遵守安全操作规程,佩戴个人防护装备,确保人员安全。
2. 质量控制:在作业过程中,严格按照质量标准和要求进行操作,确保产品质量符合要求。
3. 异常处理:如遇到作业过程中的异常情况,应及时停止作业,并寻找原因并解决。
4. 故障维修:如遇到设备故障,应按照维修流程进行维修,确保设备正常运行。
六、作业总结与改进1. 作业总结:对作业过程进行总结,包括作业效果、存在的问题和改进建议等方面。
自动化产品YPM08122 ACR1500硬件手册说明书
p/n YPM08122AutomationACR1500Hardware ManualEffective: October 7, 2002This page intentionally left blank.CHANGE NOTICEACR1500 Hardware Manual P/N PM08122 Version Change:From: Version 1.01 Dated 6/17/2000To: Version 1.02, Dated 12/5/20011. Page 10, Interrupt Select Jumper(JP9) Corrected Table 1.5 jumper location.2. Page 24, ACR1500 Technical Specification Corrected operating temperaturerange. Added tolerances to powerconsumption values.ACR1500 Hardware Manual P/N PM08122 Version Change:From: Version 1.00 Dated 9/30/1999To: Version 1.01, Dated 6/17/20001. Page 18, ACR1500 Board Hardware Wiring, TTL Digital I/O Added warning about using opto-isolation.ACR1500 Hardware Manual P/N PM08122 Version Change: From: Version 1.00 Beta Release September 14, 1999To: Version 1.00, Dated 9/30/1999This page intentionally left blank.TABLE OF CONTENTS INTRODUCTION (1)CHAPTER 1 (3)ACR1500 BOARD HARDWARE SETUP (3)Chapter 1 Overview (4)ACR1500 Board Switches (6)Address Selection Switch (SW1) (6)ACR1500 Board Jumpers (7)Jumper Table List (7)Encoder Pull-up Select Jumpers (JP1 thru JP4) (8)Miscellaneous Function Jumpers (JP5 thru JP8) (9)Interrupt Select Jumper (JP9) (10)DAC/Stepper Output Configuration Jumpers (JP10 thru JP13) (11)ACR1500 Board Hardware Wiring (12)Encoder Inputs (P1) (13)Analog Input / Output (P2) (16)TTL Digital Inputs / Outputs (P3/P4) (18)CHAPTER 2 (23)ACR1500 SPECIFICATION (23)ACR1500 Specification (24)CHAPTER 3 (27)ACR1500 MECHANICAL DRAWINGS (27)ACR1500 Mechanical Dimensions (28)ACR1500 Typical Connection Diagrams (29)iACR1500 Hardware ManualP/N PM08122ii TABLESTable 1.1 ACR1500 PC BUS Status Port Bits (6)Table 1.2 ACR1500 PC BUS Port Addresses (6)Table 1.3 ACR1500 Encoder Pull-Up Jumpers (8)Table 1.4 ACR1500 Miscellaneous Jumpers (9)Table 1.5 ACR1500 PC BUS Interrupt Select Jumpers (10)Table 1.6 ACR1500 DAC/Stepper Configuration Jumpers (11)Table 1.7 ACR1500 Encoder Input Connector (13)Table 1.8 ACR1500 Encoder Power Fuses (15)Table 1.9 ACR1500 Analog I/O Connector (16)Table 1.10 ACR1500 Stepper Power Fuses (17)Table 1.11 ACR1500 TTL Digital I/O Logic Levels (18)Table 1.12 ACR1500 Digital I/O Connectors (19)Table 1.13 ACR1500 Digital I/O Mode Configuration Table (20)Table 1.14 ACR1500 Digital IO Power Fuses (21)FIGURESFigure 1. ACR1500 Board Outline (5)Figure 2. ACR1500 Mechanical Dimensions (28)INTRODUCTIONThis document provides hardware connection information for the Acroloop ACR1500 motion controller.Introduction1ACR1500 Hardware ManualP/N PM081222This page intentionally left blank.CHAPTER 1ACR1500 BOARD HARDWARE SETUP Chapter 1, ACR1500 Board Hardware Set-Up 3ACR1500 Hardware ManualP/N PM08122 4CHAPTER 1 OVERVIEWThis section contains diagrams of the jumpers and switches on the ACR1500 board. Encoder pull-up jumpers must be set correctly based on the types of encoders being used. Failure to set these jumpers correctly may cause damage to the encoders or to the receivers on the controller card.There are no analog adjustment “pots” on the board. All analog gain and offset is under software control. The analog outputs must be wired to differential control signal inputs on a servo amplifier. The DAC outputs provide an analog control voltage of ±10 volts. Stepper outputs provide open-collector step and direction signals. There are no pull-up resistors provided on the Stepper outputs.DAC/Stepper Output configuration is set at the factory and is not field configurable. Factory default jumper settings for the ACR1500 board are highlighted within the following jumper tables.ACR1500 BOARD HARDWARE SETUPNOTE: Square pin indicates Pin 1.Figure 1. ACR1500 Board OutlineAddress Selection Switch (SW1)The ACR1500 can receive and transmit data through I/O ports on a PC BUS. Theaddresses of these ports are selectable using SW1 on the ACR1500 board. The data portis used to both transmit and receive. Both the transmit and receive channels areconnected to 512 byte First In / First Out (FIFO) hardware buffers.Refer to Figure 1 for switch location.The status port is used to see if data is waiting to be received from the card and if it is OKto send data to the card. The byte read from the status port is defined as follows:BIT Definition DescriptionBIT7 Transmit Not Full Clear to send one byteBIT6 Transmit Not Half Empty Clear to send up to 255 bytesBIT5 Receive Not Empty Data AvailableBIT4 Transmit Not Empty Still something in the bufferTable 1.1 ACR1500 PC BUS Status Port BitsThe following table shows how the switch positions relate to the ACR1500 card numberand I/O port addresses.Note that Switch 4 should be left in the “OFF” position, unless using the Flash BypassMode of operation. Flash Bypass Mode is selected when the user does not want to loadthe program information from flash at power-up or reset. The card will not communicatevia the PC BUS at Card Number 15, so after the board is powered-up or reset in FlashBypass Mode, the SW1 settings must be placed back to a valid card number.Card SW1Settings Addresses Number 4 3 2 1 Data Status0 OFF OFF OFF OFF 0x300 0x3020x3040x3061 OFFONOFFOFFOFF0x30A0x308ON2 OFFOFF0x30CON0x30EON3 OFFOFF0x3100x312OFFOFFON4 OFF0x3140x316ONOFF5 OFFON0x3180x31AOFFONON6 OFF0x31C0x31EON7 OFFONON8-14 RESERVED15 ON ON ON ON Flash Bypass ModeTable 1.2 ACR1500 PC BUS Port Addresses6ACR1500 Hardware ManualJumper Table ListThe following is a list of the jumper functions on the ACR1500 motherboard:FUNCTIONJUMPER JUMPERJP1 ENC0 Pull-up Voltage Select (Page 8)JP2 ENC1 Pull-up Voltage Select (Page 8)JP3 ENC2 Pull-up Voltage Select (Page 8)JP4 ENC3 Pull-up Voltage Select (Page 8)JP5 ReservedJP6 ReservedJP7 ReservedJP8 ReservedJP9 ISA Interrupt Select (Page 10)JP10 Channel 0 DAC/Stepper Select (Page 11)JP11 Channel 1 DAC/Stepper Select (Page 11)JP12 Channel 2 DAC/Stepper Select (Page 11)JP13 Channel 3 DAC/Stepper Select (Page 11)J1 Factory Programming Header**J2 Factory Test Header**** Connecting external signals to these headers may cause board failure or damage to IC’s.Encoder Pull-up Select Jumpers (JP1 thru JP4)The ACR1500 is capable of handling various types of incremental open-collector and line driver encoders. Care must be taken to setup each channel to match the encoder type as described below:Open Collector Encoders:When using open-collector encoders, the encoder channels must be pulled to either +5 or +12 volts, depending upon the application. Pulling up to +12 volts provides higher noise immunity, but causes a slower response time. For high frequency applications (encoder rates higher than 1 megahertz) the +5 volt pull-up section may be necessary.Line Driver Encoders:When using line driver (or balanced pair) encoders, the corresponding resistor pack should be removed from it’s socket. Leaving the resistor pack in the socket can cause faulty encoder operation and possibly severe encoder damage. Optionally, the resistor pack can be replaced with an 8-pin isolated resistor pack to supply termination resistance for the balanced signal pairs.Pull-up Selection:The following table lists the pull-up jumper settings for each encoder:WARNINGWiring a line driver encoder with the pull-up selected to+12 volts will permanently damage the encoder.Encoder Pull-Up JumpersEncoder Resistor Jumper +5V +12V0 RP1 JP1 1-2 2-31 RP2 JP2 1-2 2-32 RP3 JP3 1-2 2-33 RP4 JP4 1-2 2-3Table 1.3 ACR1500 Encoder Pull-Up JumpersRefer to Figure 1 for jumper location.8ACR1500 Hardware ManualMiscellaneous Function Jumpers (JP5 thru JP8)These four (4) jumpers are reserved for future use.Miscellaneous JumpersJumper FunctionJP5 RESERVEDJP6 RESERVEDJP7 RESERVEDJP8 RESERVEDTable 1.4 ACR1500 Miscellaneous JumpersRefer to Figure 1 for jumper location.Interrupt Select Jumper (JP9)The ACR1500 can be instructed to interrupt a PC host through the parallel bus by issuing a SET 112 command in immediate mode or from within a program. Interrupt driven software at the host level is an advanced topic and should only be attempted by someone with a thorough knowledge of interrupt driven code.In order for the PC to see the interrupt, the proper jumper selection from the following table must be made. IRQ5 is usually a good choice since printer code seldom uses interrupts and use of the secondary printer port (LPT2) is even rarer.FunctionLevel JP9CommonDisabled 1-3* Not ApplicableIRQ3 1-2 Secondary Serial (COM2)IRQ4 3-4 Primary Serial (COM1)IRQ5 5-6 Secondary Parallel (LPT2)IRQ7 7-8 Primary Parallel (LPT1)(unused)ReservedIRQ10 9-10Reserved(unused)IRQ11 11-12(unused)ReservedIRQ12 13-14(unused)ReservedIRQ15 15-16Table 1.5 ACR1500 PC BUS Interrupt Select JumpersRefer to Figure 1 for jumper location.IMPORTANT NOTE:When the ACR1500 is used in a Pentium processor based PCI board, the selected interrupt must be configured in the PCI board BIOS as a Legacy ISA interrupt (or Used By ISA in some BIOS’), since the ACR1500 is an ISA board.10ACR1500 Hardware ManualDAC/Stepper Output Configuration Jumpers (JP10 thru JP13)These four (4) jumpers are used to connect/disconnect the analog ground outputs to the P2 connector, based on the DAC/Stepper Configuration of the ACR1500 board. When a DAC Output is present, installing the jumper provides connection from the analog ground to the P2 connector signal.When a Stepper Output is present, removing the jumper disconnects the analog ground from the Direction signal at the P2 connector.These jumpers are configured at the factory, based on the DAC/Stepper Outputs built onto the ACR1500 Board as follows:DAC/Stepper Configuration JumpersJumper P2OutputChannel DAC4ConfigurationSTEPPER4ConfigurationDAC2/STEPPER2ConfigurationJP10 Channel0 IN OUT INJP11 Channel1 IN OUT INJP12 Channel2 IN OUT OUTJP13 Channel3 IN OUT OUTTable 1.6 ACR1500 DAC/Stepper Configuration JumpersRefer to Figure 1 for jumper location.This section contains diagrams of the connectors on the ACR1500 board.12ACR1500 Hardware ManualEncoder Inputs (P1)There is one 34-pin header provided on the ACR1500 for encoder feedback. The 34-pin header provides up to four (4) axes of encoder feedback. Refer to Figure 1 for connector location.Note: P1 is a 34-pin shrouded male header.P1Usage Pin Usage PinCHA0 1 CHA0’ 2CHB0 3 CHB0’ 4MRK0 5 MRK0’ 6VCC 7 GND 8CHA1 9 CHA1’ 10CHB1 11 CHB1’ 12MRK1 13 MRK1’ 14VCC 15 GND 16CHA2 17 CHA2’ 18CHB2 19 CHB2’ 20MRK2 21 MRK2’ 22VCC 23 GND 24CHA3 25 CHA3’ 26CHB3 27 CHB3’ 28MRK3 29 MRK3’ 30VCC 31 GND 32N/C 33 N/C 34Table 1.7 ACR1500 Encoder Input ConnectorEncoder Inputs (P1), ContinuedThe ACR1500 can accept any feedback device that supplies either a +5V or +12V differential signal to the ACR1500. The most common type of device is a differential encoder. Refer to the table below for common encoder setups.Encoder Type ACR1500 Pull-up/Jumper SettingLength of Cable/TypeDifferential Line Driver(+5 Volt Outputs)Remove Pull-ups 100 ft. (Beldon 9330 Shielded Twisted Pair)Open Collector Driver (No Pull-ups on Encoder) Install Pull-ups andJumper to +12V75 ft. (Beldon 9330 Shielded Twisted Pair)Open Collector Driver(With Pull-ups to +5 V on Encoder) Install Pull-ups andJumper to +5V50 ft. (Beldon 9330 Shielded Twisted Pair)TTL Driver(+5 Volt Outputs)Remove Pull-ups 50 ft. (Beldon 9330 Shielded Twisted Pair)When using a single-ended encoder (an encoder without the A-, B-, or Z- outputs), additional pull-ups and pull-down resistors must be added externally to the ACR1500 board in order for the ACR1500 to read the encoder signals. Warning: This is not a recommended mode of operation. Noise immunity is significantly reduced.Refer to the ACR1500 Typical Connection Diagram section of this manual for details on wiring a single-sided encoder to the ACR1500.ACR1500 Hardware Manual14Encoder Inputs (P1), ContinuedA fused +5VDC Encoder Output (EVCC) is available on the P1 connector for use with wiring the encoders. The maximum recommended output rating for EVCC is100 milliamps per encoder (400 milliamps, maximum).See Figure 1 for fuse F1 location.Encoder +5VDC Output FuseFuse Circuit Amps Littelfuse Part No.F1 EVCC 0.750 154.750Table 1.8 ACR1500 Encoder Power FusesChapter 1, ACR1500 Board Hardware Set-Up 15ACR1500 Hardware ManualP/N PM0812216Analog Input/Output (P2)The analog input/output connections are made through a 37-pin D-style connector on the side of the ACR1500 motion controller. Refer to Figure 1 for connector location.Note: P2 is a standard 37-pin female D-plug. Pin definitions in parentheses are for stepper modules.P2 Definition Pin Pin Definition FunctionASIG-0 ( STEP-0 ) 1 20 AGND-0 ( DIR-0 ) Channel 0 DAC/Stepper ASIG-1 ( STEP-1 ) 2 21 AGND-1 ( DIR-1 ) Channel 1 DAC/Stepper ASIG-2 ( STEP-2 ) 3 22 AGND-2 ( DIR-2 ) Channel 2 DAC/Stepper ASIG-3 ( STEP-3 ) 4 23 AGND-3 ( DIR-3 ) Channel 3 DAC/StepperSVCC 5 24 SVCC Stepper SVCC 6 25 SVCC VCC 7 26 8 27 AIN-0 9 28 AIN-1 AIN-2 10 29 AIN-3 ADC Input AIN-4 11 30 AIN-5 Module (P5) AIN-6 12 31 AIN-7 ( LCUR-0 ) 13 32 ( LCUR-1 ) Channel 0/1 Stepper ( LCUR-2 ) 14 33 ( LCUR-3 ) Channel 2/3 Stepper15 34 16 35 GND 17 36 WATCHDOG Watchdog Output GND 18 37 WATCHDOG# Watchdog Output AGND 19 ADC Input ModuleTable 1.9 ACR1500 Analog I/O ConnectorAnalog Input/Output (P2), continuedA fused +5VDC Stepper Output (SVCC) is available on the P2 connector for use with wiring the Stepper outputs. The maximum recommended output rating for SVCC is 250 milliamps.See Figure 1 for fuse F2 location.Stepper +5VDC Output FuseFuse Circuit Amps Littelfuse Part No.F2 SVCC 0.500 154.500Table 1.10 ACR1500 Stepper Power FusesChapter 1, ACR1500 Board Hardware Set-Up 17ACR1500 Hardware ManualP/N PM0812218TTL Digital Inputs / Outputs (P3/P4)WARNINGWiring TTL Digital Inputs and Outputs without using an Opto-22 Compatible opto-isolation interface or equivalent may cause intermittent board operation or permanently damage the ACR1500circuitry.There are two 50-pin Opto-22 Compatible headers provided on the ACR1500 for TTL Digital I/O Interface. Refer to Figure 1 for connector location.TTL Digital I/O signals I/O-00 thru I/O-47 are programmable in groups of eight (8) inputs or outputs and are defined in software by the user. The logic polarity (i.e. positive logic or negative logic) of the inputs and outputs is also programmable. Refer to the User’s Guide, Config Command, for programming details.The TTL Digital I/O signals are wired directly to 82C55 programmable interface IC’s. The inputs and outputs of the 82C55 IC’s are TTL-compatible. Outputs have a 2.5mA drive capability. At power-up or reset, the 82C55 IC’s I/O are set as inputs. After the board has completed initialization (the Watchdog output at the P2 connector will also become active at this time -- approximately 0.5 to 0.7 seconds), the 82C55 IC’s inputs and outputs are set to the user’s configured mode of operation.The default mode of operation for the ACR1500 Digital I/O is Mode 0 (24 Inputs/24 Outputs). The default logic level for the inputs and outputs is set at negative polarity (negative logic), which is compatible with the Opto-22 negative logic levels. This will ensure that any unconnected inputs will be in the “OFF” state. There are no pull-up or pull-down resistors provided on-board.The following table shows the definitions of the negative and positive logic for the digital input and output levels.Input/Output StateNegative Logic Input TTL Level Positive Logic Input TTL Level ON Logic Level Low Logic Level High OFFLogic Level HighLogic Level LowTable 1.11 ACR1500 TTL Digital I/O Logic LevelsTTL Digital Inputs / Outputs, continuedNote: P3 and P4 are 50-pin shrouded male headers. These headers are Opto-22 compatible.P3 P4Pin UsagePin Usage Usage PinUsage PinI/O-47 1 2 GND I/O-23 1 2 GNDI/O-46 3 4 GND I/O-22 3 4 GNDI/O-45 5 6 GND I/O-21 5 6 GNDI/O-44 7 8 GND I/O-20 7 8 GNDI/O-43 9 10 GND I/O-19 9 10 GNDI/O-42 11 12 GND I/O-18 11 12 GNDI/O-41 13 14 GND I/O-17 13 14 GNDI/O-40 15 16 GND I/O-16 15 16 GNDI/O-39 17 18 GND I/O-15 17 18 GNDI/O-38 19 20 GND I/O-14 19 20 GNDI/O-37 21 22 GND I/O-13 21 22 GNDI/O-36 23 24 GND I/O-12 23 24 GNDI/O-35 25 26 GND I/O-11 25 26 GNDI/O-34 27 28 GND I/O-10 27 28 GNDI/O-33 29 30 GND I/O-09 29 30 GNDI/O-32 31 32 GND I/O-08 31 32 GNDI/O-31 33 34 GND I/O-07 33 34 GNDI/O-30 35 36 GND I/O-06 35 36 GNDI/O-29 37 38 GND I/O-05 37 38 GNDI/O-28 39 40 GND I/O-04 39 40 GNDI/O-27 41 42 GND I/O-03 41 42 GNDI/O-26 43 44 GND I/O-02 43 44 GNDI/O-25 45 46 GND I/O-01 45 46 GNDI/O-24 47 48 GND I/O-00 47 48 GNDIOVCC 49 50 GND IOVCC 49 50 GNDTable 1.12 ACR1500 Digital I/O ConnectorsChapter 1, ACR1500 Board Hardware Set-Up 19ACR1500 Hardware ManualP/N PM0812220TTL Digital Inputs / Outputs (P3/P4), continuedThe following table provides the IO Mode configuration information, as well as the Bit Flag location for each group of inputs and outputs.The Bit Flag locations for the ACR1500 TTL Digital I/O are mapped to the standard Input Bit Flags 0 thru 31 (parameter P4096) and Output Bit Flags 32 thru 63 (parameter P4097). When the number of inputs or outputs configured exceeds 32, they are mapped to the Expansion Input Bit Flags 256 thru 271 (parameter P4104) and/or Expansion Output Bit Flags 288 thru 303 (parameter P4105).There is also one bit (Bit 116, Reference User’s Guide, Miscellaneous Outputs Flags) which acts as an expansion enable control bit. For proper operation of Acroloop Motion Control Systems ACROCUT/ACROMILL application software, this enable bit must be set when using IO modes that use expansion input or output bit flags.CONFIG IO MODEI/O00-I/O07I/O08-I/O15I/O16-I/O23I/O24-I/O31I/O32-I/O39I/O40-I/O47 0 INPUTS BIT0-7 INPUTSBIT8-15 INPUTS BIT16-23 OUTPUTS BIT32-39 OUTPUTS BIT40-47 OUTPUTS BIT48-55 1 INPUTS BIT0-7 INPUTS BIT8-15 INPUTS BIT16-23 OUTPUTS BIT32-39 OUTPUTS BIT40-47 INPUTS BIT24-31 2 INPUTS BIT0-7 INPUTS BIT8-15 OUTPUTS BIT56-63 OUTPUTS BIT32-39 OUTPUTS BIT40-47 OUTPUTS BIT48-55 3 INPUTS BIT0-7 INPUTS BIT8-15 INPUTS BIT16-23 OUTPUTS BIT32-39 INPUTS BIT256-263 INPUTS BIT24-31 4 INPUTS BIT0-7 OUTPUTS BIT288-295 OUTPUTS BIT56-63 OUTPUTS BIT32-39 OUTPUTS BIT40-47 OUTPUTS BIT48-55 5 INPUTS BIT0-7 INPUTS BIT8-15 INPUTS BIT16-23 INPUTS BIT264-271 INPUTS BIT256-263 INPUTS BITS24-31 6 OUTPUTS BIT296-303 OUTPUTS BIT288-295OUTPUTS BIT56-63OUTPUTS BIT32-39OUTPUTS BIT40-47OUTPUTS BIT48-55Table 1.13 ACR1500 Digital I/O Mode Configuration TableTTL Digital Inputs / Outputs (P3/P4), continuedA fused +5VDC IO Output (IOVCC) is available on the P3/P4 connectors for use with Opto-22 input and output racks.See Figure 1 for fuse F3 location.Digital IO +5VDC Output FuseFuse Circuit Amps Littelfuse Part No.F3 IOVCC 2 154.002Table 1.14 ACR1500 Digital IO Power FusesChapter 1, ACR1500 Board Hardware Set-Up 21ACR1500 Hardware ManualP/N PM0812222This page intentionally left blank.CHAPTER 2SPECIFICATIONS Chapter 2, ACR1500 Specification 23ACR1500 Hardware ManualP/N PM0812224ACR1500 SPECIFICATIONITEM SPECIFICATIONCPU:32 Bit Floating Point DSP @ 40 MHz Processor Type: Texas Instruments TMS320C32 Board Size: 1 Slot7.3” x 4.25” Half-Size PC Form Factor Axis Configuration: 2 or 4 axes configurations Weight:7 ouncesOperating Temperature: 0°C to 50°C (32°F to 122°F) Humidity:0 to 95%, Non-Condensing Power Consumption:+5+/************+12+/*************-12+/*************Note: Power consumption does not include any additional power required for external components (Encoders, Stepper Outputs, etc.).Encoder Inputs:Up to 4 per cardDifferential Quadrature Encoder Open-Collector or Line Driver 0.1 Hz to 8 MHz Frequency RangeFused +5VDC Encoder Output available on P1 connector, up to 100mA maximum power source per channel DAC/Stepper Outputs:Up to 4 per cardDAC Outputs:+/- 10VDC @ 5mA, maximumProgrammable Output (DAC GAIN, DAC OFFSET) 16 Bit ResolutionSingle Ended input amplifiers can be used if caution is used to avoid ground loops.Stepper Outputs:Open-Collector Step, Direction, and Low Current Outputs (no pull-up resistors on-board);30 milliamps, maximum output drive capability,Fused +5VDC Stepper Output available on P2 connector up to 250 mA.Step Output Frequency : 0 to 6 KHz, pulse width 167us 6 kHz to 4 MHz, approx. 50% duty cycleACR1500 SPECIFICATION, continuedITEM SPECIFICATIONFeedback Types: Any Differential 5VDC or 12VDC including:- Quadrature Encoder- Glass Scales- Analog (Optional)Watchdog Output: Open-Collector Output (no pull-ups on board),30milliamps, max. output drive capabilityActive-High and Active-Low Signals availableHardwired through the P2 analog headerDigital Inputs/Outputs: 48 TTL-Compatible Inputs/Outputs,Programmable in groups of 8,Opto-22 Compatible InterfaceA/D Inputs (On-Board Option): Up to 8 single-ended or up to 4 differential12 bit or 16 bit resolution availableConfigurable for various analog inputsstandardCommunications: PC-BusSerial Communications: Not AvailableChapter 2, ACR1500 Specification 25ACR1500 Hardware ManualP/N PM0812226This page intentionally left blank.CHAPTER 3ACR1500 MECHANICAL DRAWINGS Chapter 3, ACR1500 Mechanical Drawings 27ACR1500 Hardware ManualP/N PM0812228ACR1500 MECHANICAL DIMENSIONSFigure 2. ACR1500 Mechanical DimensionsACR1500 TYPICAL CONNECTION DIAGRAMSThe following schematic sheets represent some typical connection and wiring diagrams for the ACR1500 Board and associated plug-in modules: For electronic media, refer to the typical connection drawing file,ACR1500 TYPICAL CONNECTIONS.PDF, supplied separately on the AMCS CD P/N CD2000 under the \DOCS directory.Chapter 3, ACR1500 Mechanical Drawings 29。
自动化系统作业指导书

自动化系统安全操作规程作业指导书1、目的根据“安全生产,人人有责”的原则,确保公司的各项规章制度得以严格贯彻贯彻和恪守,保护职工本身的安全和健康,确保设备安全正常运行,规定了自动化系统的安全操作规程。
2、总则严格恪守公司的各项安全规章制度、安全技术操作规程、工艺纪律和劳动纪律,接受技术培训,服从管理,杜绝“三违”作业,做到“三不伤害”。
3、合用范畴中控室作业全过程。
4、职责中控员遵照执行:1.中控员应纯熟掌握全厂管道网络分布状况、污水解决工艺流程、技术指标及生产设施、设备的技术特性。
2.负责中控室自控系统各硬件及软件的日常操作;3.负责中控室硬件设备的保养、做好生产运行数据的存贮和保管;4.根据厂部下达的生产任务,中控员要负责贯彻、实施并督促各生产班组认真执行,以确保生产任务的完毕。
5.监视污水解决厂工艺、设备的运行状况,确保全厂工艺、设备正常运行;6.根据水质变化,及时指导、调节、变化生产工艺,以确保解决后的水质达成排放原则。
若生产上出现异常现象要及时将状况向上级报告。
7.生产设备出现突发故障,中控应及时报值班人员,机修人员与当班人员应及时提出解决方案,并会同班组采用必要应急方法,不能解决的应及时上报,其中过程都需统计在值班统计本上。
8.认真做好值班统计,及时填写运行报表,按“交接班制度”做好交接班工作。
9.完毕领导临时交办的任务。
5、安全操作规程5.1.中控室安全操作规程1、中控室人员应熟悉监控系统及多个仪表的工作电压范畴、工作原理、性能特点、检测点与检测项目。
2、中控室人员每天定时统计生产报表和监测报表,及时反映厂内的生产运行状况。
3、根据生产运行参数及管理人员的指令,启动自动控制设备,以满足工艺规定,没有授权不得随意开停自控设备。
4、阴雨天气到现场巡视检查仪表时,操作人员应注意避免触电。
5、各类检测仪表的一次传感器均应按规定清污除垢。
6、微机系统的打印机应根据阐明书进行正常保养维护。
7、检测仪表出现故障,不得随意拆、卸变送器和转换器。
EMG imatic操作手册最新版

技术服务 如需技术支持和服务,请联系德瑞中国办事处或负责该项目的相应代理商。
如您的产品未从德瑞中国办事处或授权代理商处采购,德瑞中国将不提供质量保证,并且只能提供有偿 的售后服务及技术支持。”
本手册的说明是针对软件版本 物(执行器可能具有高达 100kg 的重量)危险和吊车知识的人员进行。 执行器安装到阀门上必须由具有执行器和阀门机械相互连接知识的人员进行。 执行器的电气连接必须由具有电气危险知识的人员进行。接线时接触非绝缘连线,这些连线可能带有危 险电流。另外,还必须遵守电气安装的相关有效规程。
DREHMO® -i-matic
一体化电动执行器操作手册
该操作手册适用于 i-matic 系列开关型、步进型和调节型电动执行机构
紧凑型接线盒
电子控制单元
显示单元
电机
齿轮单元 输出驱动
手轮
安装说明 操作说明 维护说明 适用于多回转、角行程和直行程电动执行器
注意: 本手册是供货的一部分,请妥善保存以备将来使用.
DREHMO®电动执行器供货时包含下列文件: (取决于供货时设备的不同选项)
• 本安装、调试、维护手册 • 接线图 imxxx-xx-xx-xxx • 用于现场总线接口(PROFIBUS,Modbus)的附加操作手册
这个符号代表 “附加信息”。 未能遵照执行可能会产生损害。
这个符号表示“注意”。 未能遵照执行可能会导致人员和设备损害。
第 4 页,共60页
DREHMO-i-matic 操作手册
目录
1 执行器技术数据................................................................................................... 6
德国瑞德GW系列用户使用说明书

2 安全.............................................................5 2.1 遵守指导说明................................................ 5 2.2 警告标志和符号解释........................................5 2.3 避免危险...................................................... 5 2.4 预期用途...................................................... 5 2.5 操作安全的基本说明........................................6
4.9 连接燃气管,针对燃气类型检查燃烧器设置........... 20 4.9.1 燃气管连接的重要说明...............................20 4.9.2 连接燃气管...............................................20 4.9.3 进入设备内部...........................................20 4.9.4 检查燃烧器的预先设置...............................21
Rexnord 产品指南说明书

Highly engineered for performance in a competitive world, our full range of power transmission components and vibration management solutions will help both your driver and driven equipment work in concert with the laws of physics, run efficiently, and boost your productivity.METALLIC COUPLINGSHERCUFLEX® GEAR COUPLINGSBENEFITS Incorporate the latest in Finite Element Analysis (FEA) technology with therevolutionary HercuFlex Gear CouplingFEATURES•Unequaled bore (sizes from 7/16” to 44”) and torque capacity (to 54,000,000 in -lbs) •Seal design increases contamination resistance •Interchangeable with standard AGMA and industry standard•1.5° of misalignment per gear meshGRID COUPLINGSBENEFITS Protect power transmission systems from vibration and shock with an all -metal, flexible grid couplingFEATURES •Interchangeable with industry standards up to size 1260•Available in spacer style designs•25 Sizes with a maximum bore of 20” and a maximumtorque of 8,250,000 in -lbsDISC COUPLINGSBENEFITS Eliminate the need for lubrication and reducemaintenance. Inspect without disassembly to keep things runningFEATURES •The revolutionary disc pack profile design can accommodate .5° to 1.5° of angular misalignment •No wearing parts•Special styles available: spacer, close -coupled, drop -in, and adjustable •Meets API 610, 671Standards (certain models only)•Torque capacity to 7,700,000 in -lbsLOVEJOY AND CURTIS® UNIVERSAL JOINTSBENEFITSCouple low to moderate speed and torque industrialapplications and accommodate misalignment up to 25°FEATURES•Maximum bore of 2”, many bore types available such as round, hex, square and splines•Available in stainless steel •Interchangeable with industry standards •Easy removal of Curtis parts for repair for faster disassembly of the drive trainQUICK FLEX® COUPLINGSBENEFITSChoose QUICKFLEX when you are ready to reduce downtime, reduce maintenance, and reduce your total cost of coupling ownership. This could be the last coupling you ever need.FEATURES•Transmit the same or higher torque than a gear, grid, chain or elastomeric coupling with similar dimensions•Easy to install and requires no lubrication, lifespan matches the rotating equipment•Replace insert in minutes • Up to 2° misalignmentS -FLEX ENDURANCE ™ SHEAR TYPE COUPLINGSBENEFITS Transmit uniform loads such as pumps and fans, absorb shock,dampen vibration, and accommodate up to 1°misalignment with the extremely durable S -Flex EnduranceFEATURES•Now lasts 3X longer •Best performing EPDM material in the market •Three sleeve materials provide adaptability to requirements such as intense shock loads and high vibration•Inch and metric bores, interchangeable with industry standardsSTRAIGHT JAW COUPLINGSBENEFITS If you prefer to stick to the basics and stick to what you know, use this, the most popular fail -safe coupling in power transmissionFEATURES •Lovejoy offers the industry ’s largest variety of stock bore and keyway combinations of straight jaw couplings•Hubs and inserts in many materials such as stainless steel, urethane, and bronze to cater to theneeds in your environment no matter how harshJAW IN -SHEAR COUPLINGSBENEFITSExpand the utility of your straight jaw. Convert it to an in -shear when you need to accommodate misalignment or want to reduce downtime when performing maintenanceFEATURES•Accommodates nominal torque up to 183,000 in -lbs •Ready for 16 standard sizes of Lovejoy hubs•Replace spider in minutes without tools or removing hubs•Twice the misalignment capacity over standard jaw •Insert is 50D shoreurethane max temp 200°FELASTOMERIC COUPLINGS™®SPECIALTY PRODUCTS & ACCESSORIESTORSIONAL COUPLINGSBENEFITS Simultaneously handle all forms of alignment, drive train geometry, weight transfers and other diesel related conditionsFEATURES•Engineered coupling for any drive train involving diesel power or other sources of torsional excitation•Isolate torsional vibrationfrom the system•15 families of products •Torque capacity to 33,000in -lbsCURVED JAW COUPLINGSBENEFITSEuropean stylemachinery? You ’re covered with this European standard in jaw coupling technology.FEATURES •Available in sintered iron, cast iron, steel, and aluminum•Accommodates nominal torque up to 230,000 in -lbsMOTION CONTROL COUPLINGSBENEFITS Light duty, fractionalhorsepower, and precisionapplications such as servo and stepper motorsFEATURES •Seven designs available •Beam, bellows, mini -disc, Oldham, mini -soft, GS curved jaw and mini jawVARIABLE SPEED DRIVESBENEFITS For a mechanical method of speed adjustmentFEATURES •Available in a wide range of sizes and horsepower ratings•Steel and cast iron adjustable motor bases •Grooved and flat companion sheavesRUNRIGHT® TENSIONERSBENEFITSExtend the life of belts and chains by applying aconstant tension on the drive systemFEATURES•Self adjusting/tensioning, easy to install•Fits all chain sizes up to 120 single chain and C size belts•360° positioning flexibility •Available in 7 stock sizes (4 sizes in stainless steel)RUNRIGHT MOTOR BASESBENEFITSProvide a constant torquetransmission with less energyconsumption and increase the life of your drive systemFEATURES•Sixteen standard motor bases for NEMA frames 143T to 5810 and IEC frames 90S thru 315M •Handles motors 1/2 to 700 HPRUNRIGHT ANTI -VIBRATION & OSCILLATION MOUNTSBENEFITSDramaticallyreduce vibration & unwanted equipment movements & lengthen replacement intervals when compared to coil springsFEATURES•No metal to metal contact, low wear, low maintenance•Available in 9 stock sizes (5 in stainless steel)RUNRIGHT SUSPENSION UNITSBENEFITSSupport orsuspend vibratory equipment or drive systems; absorb tensile, pressure and shear loads, whileproviding effective noise reductionFEATURES•Design and material allow for units to function as a spring, bearing and dampener all in one •Mount in any position,vertically or horizontally on the floor, ceiling, or wallTENSIONING & VIBRATION MANAGEMENTELASTOMERIC COUPLINGS (CONT.)SHAFT LOCKING DEVICESBENEFITS Provides keyless locking of shafts to hubsFEATURES •Zero backlash•Reduced maintenance •Adjustable for easy radial timing and axial alignmentUNIQUE SOLUTIONSBENEFITSYour specialcircumstances call for a uniquesolution, give us a tryFEATURES•DeltaFlex, Uniflex, Saga, Shaft Collars, Rigid Sleeve coupling styles•GD Rigid Compression sleeve couplings for conveyorsFor more information, visit us at www.lovejoy Lovejoy is recognized around the world as the premier supplier with the widest selection of shaft couplings and power transmission components. No matter the application, Lovejoy has the expertise, service, and solution for it.Lovejoy, Inc.2655 Wisconsin Avenue Downers Grove, IL 60515 Phone: 630-852-0500Email: info@lovejoy UPC 68514474878 REV A®。
自动化作业指导书流程步骤包括
自动化作业指导书流程步骤包括自动化作业指导书流程步骤包括:项目概述、需求分析、系统设计、编码实现、测试验证和部署上线。
一、项目概述在自动化作业指导书的第一部分,需要对项目进行概述,明确项目的目标和范围。
这一部分需要包括以下内容:1. 项目背景:介绍项目的背景和动机,说明为什么需要进行自动化作业。
2. 项目目标:明确项目的目标,例如提高作业效率、减少人力成本等。
3. 项目范围:定义项目的范围,包括要自动化的具体作业内容和涉及的相关系统。
二、需求分析在自动化作业指导书的第二部分,需要进行需求分析,明确系统需要满足的功能和性能要求。
这一部分需要包括以下内容:1. 功能需求:列出系统需要具备的功能模块和功能点,并对每个功能点进行详细描述。
2. 性能需求:定义系统对于吞吐量、响应时间等性能指标的要求。
3. 数据需求:说明系统对于输入数据和输出数据的格式和要求。
三、系统设计在自动化作业指导书的第三部分,需要进行系统设计,确定系统架构和模块划分。
这一部分需要包括以下内容:1. 系统架构:选择合适的系统架构,例如分层架构、微服务架构等。
2. 模块划分:将系统划分为若干个功能模块,并明确各个模块之间的关系和接口。
3. 数据库设计:设计系统所需的数据库结构,包括表结构、字段定义等。
四、编码实现在自动化作业指导书的第四部分,需要进行编码实现,将系统设计转化为具体的代码实现。
这一部分需要包括以下内容:1. 编码规范:制定代码编写规范,包括命名规范、代码风格等。
2. 编码实现:根据系统设计进行具体的编码实现,并进行必要的单元测试。
五、测试验证在自动化作业指导书的第五部分,需要进行测试验证,确保系统满足需求并具备良好的性能。
这一部分需要包括以下内容:1. 单元测试:对各个功能模块进行单元测试,验证其功能是否正确。
2. 集成测试:将各个功能模块进行集成,并对整个系统进行综合性能测试。
3. 用户验收测试:邀请用户参与测试,并根据用户反馈做出相应修改。
自动化产品说明书:YPM08125 断开箱硬件指南

p/n YPM08125AutomationBreakout BoxHardware ManualEffective: October 7, 2002This page intentionally left blank.CHANGE NOTICEBreakout Box Hardware Manual P/N PM08125 Version Change: From: Version 1.00, Dated 5/18/2000To: Version 1.01, Dated 12/8/20011. Miscellaneous Added ACR8020 to document. Breakout Box Chassis P/N PM08125 Version Change:Release: Version 1.00, Dated 5/18/2000iBreakout Box InterconnectP/N PM08125ii TABLE OF CONTENTSINTRODUCTION (1)CHAPTER 1 (3)BREAKOUT BOX INTERCONNECION (3)Chapter 1 Overview (4)Breakout Box Interconnect Wiring (5)Breakout Box to Acroloop Interconnect (6)Overview (6)Encoder Input Cables HP1A/HP1B TO P1A/P1B (8)Digital I/O Cables HP3/HP4 TO P3/P4 (9)Communication Cable HP5 to P5 (10)Breakout Box to User Interconnect (11)Overview (11)Breakout Box Digital I/O LED Power (HPWR) (12)COM1/COM2 Serial Port Connectors (13)Parallel Port Connector (14)DSP Network Connector (15)ACR1000 Master Connector (15)CHAPTER 2 (17)BREAKOUT BOX MECHANICAL DRAWINGS (17)Breakout Box Mechanical Dimensions (18)TABLESTable 1 Breakout Box LED Isolated Power Connector – Sinking Outputs Option (12)Table 2 Breakout Box LED Isolated Power Connector – Sourcing Outputs Option..12 Table 3 COM1/COM2 Serial Port Connectors (13)Table 4 Parallel Port Connector (14)FIGURESFigure 1. Breakout Box Connections (5)Figure 2. Typical 34-Pin Breakout Box Ribbon Cable (6)Figure 3. Typical ACR2000 34-Pin Split Digital I/O Ribbon Cable (7)Figure 4. Breakout Box Mechanical Dimensions (18)iiiBreakout Box InterconnectP/N PM08125ivThis page intentionally left blank.INTRODUCTIONThis document provides hardware connection information for the Acroloop P/N RBD084XX series of Breakout Boxes.Introduction1Breakout Box InterconnectP/N PM081252This page intentionally left blank.CHAPTER 1BREAKOUT BOX INTERCONNECTION Chapter1, Breakout Box Interconnection3Breakout Box InterconnectP/N PM08125 4CHAPTER 1 OVERVIEWThis section contains wiring diagram information for the Acroloop series of Breakout Box Interconnect Chassis.Before the optically-isolated digital inputs and outputs can be monitored using the Breakout Box LED’s, the chassis must be connected to an external +24V DC power supply. This connection is made at the PWR connector.WARNINGWiring VEXT with the incorrect voltage will permanentlydamage the Digital I/O circuitry. The isolated voltage (VEXT)is +24VDC.Selecting the wrong Breakout Box for the type of outputdrivers installed on the connecting Acroloop Board willpermanently damage the output driver IC’s and will cause all ofthe Breakout Box I/O status LED’s to turn on. The BreakoutBox is configured at the factory, based on the Sinking orSourcing Option selected when ordered, and is NOT fieldconfigurable.BREAKOUT BOX INTERCONNECT WIRINGThe following is an outline drawing of the connector locations on the Breakout Box .Input StatusOutput StatusPARALLELHPWR1(EXT 24VDC)HP4(INP0-INP31)HP3(OUT32-OUT63)HP1B(ENC4-ENC7)HP1A(ENC0-ENC3)HP5(COMM)Figure 1. Breakout Box ConnectionsNOTE: When connecting ribbon cables from Acroloop Motion Control Cards to the Breakout Box, check the location of Pin 1 to assure proper connection. Pin 1is indicated by the red marker stripe on the ribbon cable. See Breakout Boxto Acroloop Board Interconnect section of this manual.Breakout Box Interconnect6BREAKOUT BOX TO ACROLOOP BOARD INTERCONNECTOverviewThis section provides the cable interface information for connecting the Breakout Box to an Acroloop Motion Control Board.For the ACR8000, ACR8010 and ACR8020, there are up to five (5) 34-Pin ribbon cables supplied (HP1A, HP1B, HP3, HP4, and HP5), depending on the configuration ordered (i.e. 2/4/6/8 Axes). Figure 2 shows a typical 34-Pin ribbon cable.For the ACR2000, there are two (2) 34-Pin ribbon cables (HP1A, HP5) and one (1) 34-Pin split-ribbon cable (HP3/HP4) supplied. Figure 3 shows a typical 34-Pin split ribbon cable for ACR2000 Digital I/O connections.T o Breakout BoxT o Acroloop Board T op View24 +/- 2 InchesFigure 2. Typical 34-Pin Breakout Box Ribbon CableBREAKOUT BOX TO ACROLOOP BOARD INTERCONNECTT o Breakout BoxT op View24 +/- 2 InchesTO INPUTS(HP4)(HP3)Figure 3. Typical ACR2000 34-Pin Split Digital I/O Ribbon CableNOTE: The ACR2000 Digital I/O Split Ribbon Cable will require a cross betweenHP3 and HP4 on the Breakout Box side so that the inputs and outputs areconnected correctly. Please note the connector labels when installing.BREAKOUT BOX TO ACROLOOP BOARD INTERCONNECT Encoder Input Cables HP1A/HP1B TO P1A/P1BThere are two 34-pin headers provided on the Breakout Box to supply encoder feedback signals to an Acroloop Motion Control Card. The two 34 pin headers provide up to eight (8) axes of encoder feedback (Encoders 0 thru 7). Refer to Figure 1 for ribbon cable connection location.Connections are as follows:ACR8000/ACR8010/ACR8020:ENC0-ENC3, HP1A (Breakout Box) to P1A (Acroloop Card)ENC4-ENC7, HP1B (Breakout Box) to P1B (Acroloop Card)ACR2000:ENC0-ENC3, HP1A (Breakout Box) to P1 (Acroloop Card)8Breakout Box InterconnectBREAKOUT BOX TO ACROLOOP BOARD INTERCONNECTDigital I/O Cables HP3/HP4 TO P3/P4There are two 34-pin headers provided on the Breakout Box to interface Digital I/O signals to an Acroloop Motion Control Card. The 34 pin headers are used for the 32 Digital Inputs and 32 Digital Outputs. Refer to Figure 1 for connector location.Connections are as follows:ACR8000/ACR8010/ACR8020:OUT32-OUT63, HP3 (Breakout Box) to P3 (Acroloop Card)INP00-INP31, HP4 (Breakout Box) to P4 (Acroloop Card)ACR2000:OUT32-OUT47, HP3 (Breakout Box) to P3** (Acroloop Card)INP00-INP15, HP4 (Breakout Box) to P3** (Acroloop Card)ACRIO (I/O Expansion Card):OUT32-OUT63, HP3 (Breakout Box) to AP3 (I/O Expansion Card)INP00-INP31, HP4 (Breakout Box) to AP4 (I/O Expansion Card)**ACR2000 uses a split ribbon cable. See Figure 3.BREAKOUT BOX TO ACROLOOP BOARD INTERCONNECT Communication Cable HP5 TO P5There is one 34-pin header provided on the Breakout Box for the 2 serial and 1 parallel communications ports interfacing to an Acroloop Motion Control Card. Refer to Figure 1 for connector location.Connections are as follows:ACR2000 Comm Board/ACR8000/ACR8010/ACR8020 Comm Board:Communication Signals, HP5 (Breakout Box) to P5 (Acroloop Card)10Breakout Box InterconnectBREAKOUT BOX TO USER INTERCONNECTOverviewThis section contains hardware wiring information for the connectors on the Breakout Box.BREAKOUT BOX TO USER INTERCONNECTBreakout Box Digital I/O LED Power (HPWR)HPWR is the connection for the user supplied voltage for the Digital Input and Digital Output Status LED’s and should be wired to VEXT as shown in the table below. Refer to Figure 1 for connector location.Isolated voltage (VEXT) refers to +24VDC.WARNINGWiring VEXT with the incorrect voltage will permanentlydamage the Digital I/O LED circuitry. The isolated voltage(VEXT) is +24VDC.Selecting the wrong Breakout Box for the type of outputdrivers installed on the connecting Acroloop Board willpermanently damage the output driver IC’s and will cause all ofthe Breakout Box I/O status LED’s to turn on. The BreakoutBox is configured at the factory, based on the Sinking orSourcing Option selected when ordering and is NOT fieldconfigurable.Note: HPWR1 is a 3-pin male Weidmuller plug.HPWRSinking Outputs OptionLED Isolated Power ConnectorUsage PinIsolated Voltage (VEXT) 1Isolated Voltage (VEXT) 2Isolated Common (GEXT) 3Table 1. Breakout Box LED Isolated Power Connector – Sinking Outputs OptionHPWRSourcing Outputs OptionLED Isolated Power ConnectorUsage PinIsolated Common (GEXT) 1Isolated Common (GEXT) 2Isolated Voltage (VEXT) 3Table 2. Breakout Box LED Isolated Power Connector – Sourcing Outputs Option 12Breakout Box InterconnectBREAKOUT BOX TO USER INTERCONNECTCOM1/COM2 Serial Port ConnectorsThere are two standard DB-9 male connectors provided on the Breakout Box to interface to user serial communication ports. Refer to Figure 1 for connector location.COM1 Serial Port Connector COM2 Serial Port ConnectorRS-232 Signal RS-422/RS-485Signal PinRS-232SignalRS-422/RS-485Signal PinMUX1 N.C. 1 MUX2 N.C. 1 RXD1 N.C. 2 RXD2 N.C. 2 TXD1 N.C. 3 TXD2 N.C. 3 N.C. N.C. 4 N.C. N.C. 4 GND GND 5 GND GND 5 N.C. TXD1A 6 N.C. TXD2A 6 N.C. TXD1B 7 N.C. TXD2B 7 N.C. RXD1A 8 N.C. RXD2A 8 N.C. RXD1B 9 N.C. RXD2B 9 Table 3. COM1/COM2 Serial Port ConnectorsBREAKOUT BOX TO USER INTERCONNECTParallel Port ConnectorThere is one standard DB-25 female connector provided on the Breakout Box to interface to user parallel communication ports. Refer to Figure 1 for connector location.Signal Pin Signal PinSTROBE 1 AUTO14FEEDDATA0 2 ERROR 15DATA1 3 INIT 16IN 17DATA2 4 SELDATA3 5 GND 18DATA4 6 GND 19DATA5 7 GND 20DATA6 8 GND 21DATA7 9 GND 22ACK 10 GND 23BUSY 11 GND 24PAPER OUT 12 GND 25SEL OUT 13Table 4. Parallel Port Connector14Breakout Box InterconnectBREAKOUT BOX TO USER INTERCONNECTDSP Network ConnectorThis connector is for factory use only.ACR1000 Master ConnectorThis connector is for factory use only.Chapter1, Breakout Box Interconnection15Breakout Box InterconnectP/N PM0812516This page intentionally left blank.CHAPTER 2BREAKOUT BOX MECHANICAL DRAWINGS Chapter 2, Breakout Box Mechanical Drawings 17Breakout Box InterconnectP/N PM08125 18BREAKOUT BOX MECHANICAL DIMENSIONSFigure 4. Breakout Box Mechanical DimensionsSuggested Mounting Orientation:Breakout Box P/N RBD084XX should be mounted on end, as shown in above figure. This will prevent any debris from falling into the terminal block connectors, causing electrical connection problems.。
3X8 DR5.1 用户手册说明书
PO842627 01
3X8 DR5.1 Owner’s Handbook
Host system signalng codes 136 Line Pools 139 Line Redirection 141 Long Tones 146 Messages 147 Norstar Telephones 153
Buttons 153 Headset 155 Hearing aid compatibility 156 Wall mounting 156 Page 157 Priority Call 160 Service Modes 162 Special Telephones 164 Speed Dial 167 System features 170 Time features 175 Transfer 176 Voice Call 181
Log your incoming calls Autobumping 91
Call Log 89
Make calls quickly without
having to dial the whole Autodial 81 Hotline telephone 165 Last Number Redial 121
3X8 DR5.1 Owner’s Handbook
PO84262701
COS Password 112 Customizing your telephone 113 Dialing 120 Do Not Disturb 126 Feature programming 128 Group Listen 131 Handsfree/Mute 132 Hold 134 Host System Signaling 136
broker XYXT-10使用说明 (英文版)说明书
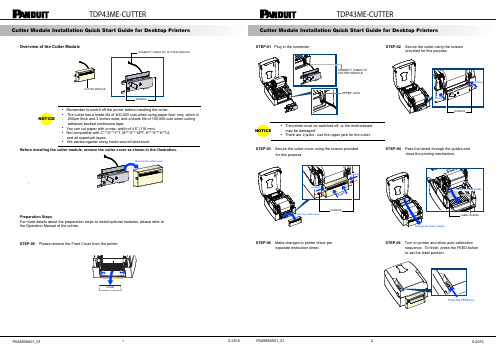
• Remember to switch off the printer before installing the cutter.• The cutter has a blade life of 400,000 cuts when using paper liner only, which is250μm thick and 3 inches wide; and a blade life of 100,000 cuts when cutting adhesive backed continuous tape.• You can cut paper with a max. width of 4.5” (116 mm).• Not compatible with C***X***Y*T, M***X***UPT, H***X***H*T-2, and all supertack tapes.• We advise against using inside wound label stock.NOTICESTEP-02 Secure the cutter using the screws provided for this purpose.STEP-03 Secure the cutter cover using the screws provided for this purpose.STEP-06 Turn on printer and allow auto-calibration sequence. To finish, press the FEED button to set the label position.Cutter Module Installation Quick Start Guide for Desktop Printers1Cutter Module Installation Quick Start Guide for Desktop PrintersSTEP-04 Pass the labels through the guides andclose the printing mechanism.TDP43ME-CUTTERTDP43ME-CUTTER2PA26898A01_015-2015PA26898A01_015-2015STEP-05 Make changes to printer driver per separate instruction sheet.Overview of the Cutter ModuleBefore installing the cutter module, remove the cutter cover as shown in the illustration.Preparation StepsFor more details about the preparation steps to install optional modules, please refer to the Operation Manual of the printer.STEP-00 Please remove the Front Cover from the printer.• The printer must be switched off, or the motherboardmay be damaged!• There are 2 jacks : use the upper jack for the cutter.NOTICESTEP-01 Plug in the connector。
Esprit Automation Lightning D 精确切割机说明书

Lightning DCompact and Cost Effective Precision CuttingLightning D machines cover a wide range of applications. Manufactured as a single fabricated structure the Lightning D has an integral segmented fume-extraction cutting table. Lightning D machines can be specified with a range of plasma cutting systems including HyPerformance HPR XD, HSD130 and the full range of Powermax plasma cutting systems. Available in a range of sizes from the baby 2.5x1.25m machine up to 8mx2m, the flexible Lightning D offers precision cutting and high productivity. Linear bearings and direct-drive rack and pinion transmissions in both axes combined with Digital AC brushless drives and the EDGE Pro CNC deliver smooth accurate cutting from gauge to 25mm.True Hole Capable MachineDesign FeaturesOne piece fabricated & machined frame …Stable & accurateCompact design …Small footprintMachine tool grade linear bearings in all axes …Smooth motionIntegral segmented cutting table …Clean working areaIntegral cable chain handling system …Long term reliabilityPowerful digital AC brushless drives …High dynamic performanceDirect drive rack & pinion transmissions …Accuracy & repeatabilityBall screw digital torch height control …Best cut qualityLaser pen pointer for plate positioning and alignment …Easy set upRange of standard sizes …FlexibleHypertherm True Hole capable …The best plasma cut holesLightning D ApplicationsLintel manufactureAgricultural machineryHVAC ductworkFlue & chimney manufacturePipeworkSheet metalworkSpecialist vehiclesFork truck manufactureLight/medium fabrication Fan manufactureLightning D machines cover a wide range of applications. Manufactured as a single fabricated structure they have anintegral segmented fume-extraction cutting table and can be specified with a range of plasma cutting systems.Lightning D machines are shipped as a single piece fabricated bed and can quickly be installed and in production.Lightning D Series machines are fitted with a rigid torch protection system to minimise damage in the event of a torch collision.Plate-rider torch height control can be specified with the Lightning D machine for high speed sheet cutting.Plate marking for part numbers, bending lines or marking out for assembly is available on the Lightning D; Arc marking or Pin-matrix marking are available.Lightning D Machine OptionsHPR130XD – 16 mm dross free mild steel cuttingAuto or manual gas consoleHSD130 - 16 mm dross free mild steel cutting Powermax - Up to 25 mm mild steel cuttingBed sizes 3 x 1.5 m to 8 x 2 mHigh speed pin matrix markingSingle or twin torch capacity Procut CAD/CAM softwareDESIGN SPECIFICATIONSNominal Cut Width As per machine denomination (e.g. Lightning D1500 = 1,500 mm)Nominal Cut Length 3,000 mm, 4,000 mm & 6,500 mmNominal Cut Height 700 mmOverall Height 1,695 mmExtraction Outlet Size 496 mm wide x 219 mm high apertureMaximum Traversing Speed 40 m/minOVERALL DIMENSIONS (mm)D1500 D2000 3,000 mm Width 2,415 2,915 Length 5,277 5,277 4,000 mm Width 2,415 2,915 Length 6,277 6,277 6,500 mm Width 2,415 2,915 Length 8,817 8,817POWER REQUIREMENTSInput Voltage (U1) 230 V / 1 Ph / 50 Hz / Earth / NeutralInput Current (I) 2.7 A。